JP4390274B2 - 撮像装置及び制御方法 - Google Patents
撮像装置及び制御方法 Download PDFInfo
- Publication number
- JP4390274B2 JP4390274B2 JP2004377241A JP2004377241A JP4390274B2 JP 4390274 B2 JP4390274 B2 JP 4390274B2 JP 2004377241 A JP2004377241 A JP 2004377241A JP 2004377241 A JP2004377241 A JP 2004377241A JP 4390274 B2 JP4390274 B2 JP 4390274B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- images
- memory
- blur
- camera shake
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6811—Motion detection based on the image signal
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6812—Motion detection based on additional sensors, e.g. acceleration sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/683—Vibration or motion blur correction performed by a processor, e.g. controlling the readout of an image memory
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/684—Vibration or motion blur correction performed by controlling the image sensor readout, e.g. by controlling the integration time
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/684—Vibration or motion blur correction performed by controlling the image sensor readout, e.g. by controlling the integration time
- H04N23/6845—Vibration or motion blur correction performed by controlling the image sensor readout, e.g. by controlling the integration time by combination of a plurality of images sequentially taken
Description
まず、本発明の第1の実施形態について説明する。
最初に、図4(a)に示す通常撮影モードの動作について説明する。まず、撮像素子102は、蓄積時間T1の間、被写体からの光を光電変換して電荷を蓄積する。この蓄積時間T1の間に、CPU120は角速度センサ105の出力から手ぶれ情報を取得し、手ぶれ情報の平均値を算出する。この算出した値に基づいて、図3を参照して上述したようにして、CPU120は撮像素子102からの読み出しタイミング及びラインメモリ104からの読み出しタイミングを制御して、画像を切り出して読み出すことにより手ぶれ補正を行う。このようにして切り出した1フレーム分の画像信号を画像メモリ110に記憶する。
次に、図4(b)に示す撮像素子蓄積スローシャッターモードの動作について説明する。撮像素子蓄積スローシャッターモードは、被写体が暗く、カメラの揺れが小さい場合に設定されるモードである。
最後に、図4(c)に示すメモリ蓄積スローシャッターモードの動作について説明する。メモリ蓄積スローシャッターモードは、被写体が暗く、撮像装置の揺れが大きい場合に設定されるモードである。
次に、本発明の第2の実施形態について説明する。
最初に、図5(a)に示す通常撮影モードの動作について説明する。まず、撮像素子102は、蓄積時間T1の間、被写体からの光を光電変換して電荷を蓄積する。この蓄積時間T1の間に、CPU120は角速度センサ105の出力から手ぶれ情報を取得し、手ぶれ情報の平均値を算出する。この算出した値に基づいて、図3を参照して上述したようにして、CPU120は撮像素子102からの読み出しタイミング及びラインメモリ104からの読み出しタイミングを制御して、画像を切り出して1ラインおきに読み出すことにより各フィールド画像の手ぶれ補正を行う。このようにして切り出した1フィールド分の画像信号(例えば、図5(a)の「1奇」)を画像メモリ110に記憶する。以降、直前の蓄積時間T1で蓄積した画像信号を読み出したラインと異なるラインの信号を読み出すことで、1フィールド分の画像信号(例えば、図5(a)の「2偶」、「3奇」、「4偶」等)を画像メモリ110に記憶する。ここで、「奇」は奇数フィールドを、「偶」は偶数フィールドを示している。
次に、図5(b)に示す撮像素子蓄積スローシャッターモードの動作について説明する。
最後に、図5(c)に示すメモリ蓄積スローシャッターモードの動作について説明する。
次に、本発明の第3の実施形態について説明する。
図6に示すメモリ蓄積スローシャッターモードでは、通常撮影モードと同じ蓄積時間T1の間、撮像素子102を露光する。この蓄積時間T1の間に、CPU120は角速度センサ105の出力から手ぶれ情報を取得し、手ぶれ情報の平均値を算出する。この算出した値に基づいて、図3を参照して上述したようにして、CPU120は撮像素子102からの読み出しタイミング及びラインメモリ104からの読み出しタイミングを制御して、画像を切り出して読み出すことにより手ぶれ補正を行う。このようにして切り出した1フレーム分の画像信号(例えば、図6の「1」)を、第1フレームメモリ110aに記憶する。
上記第3の実施形態では、画像メモリ110に2枚のフレーム画像を記憶する場合について説明したが、3枚以上のフレーム画像を記憶可能な容量を有する画像メモリ110を用いることにより、3枚以上のフレーム画像を加算することが可能になり、より暗い被写体を撮影する場合にも、通常撮影モードと同等の手ぶれ補正特性を保ったまま、より明るい画像を取得することができる。
図7は、プログレッシブ動画撮影を行った際のメモリ蓄積スローシャッターモードの別の動作を示す図で、通常撮影モードの4倍の露光時間分の画像信号を加算する場合の信号の流れ及びタイミングを表した図である。この場合、画像メモリ110は少なくとも4枚のフレーム画像の画像信号を格納するために十分な容量を備えているものとし、ここでは便宜上、第1フレームメモリ110a、第2フレームメモリ110b、第3フレームメモリ110c、第4フレームメモリ110dと呼ぶ。
次に、本発明の第4の実施形態について説明する。
最初に、図9(a)に示す通常撮影モードの動作について説明する。まず、撮像素子102は、蓄積時間T1の間、被写体からの光を光電変換して電荷を蓄積し、蓄積時間T1終了後、電荷信号を撮像素子102からCDS・A/D103を介して第1フレームメモリ110a及び第2フレームメモリ110bに交互に読み出す動作を繰り返し行う。画像ベクトル検出回路801は、新たに読み出した画像(例えば、第2フレームメモリ110bに記憶された「2」)と、1フレーム前に読み出した画像(例えば、第1フレームメモリ110aに記憶された「1」)とを比較して動きベクトルを検出し、検出した動きベクトルに基づいて、新たに読み出した画像(上述の例の場合、「2」)の手ぶれ情報を検出する。なお、図9の手ぶれ検出の各パルス横の( )の数字は、手ぶれ情報を検出する画像を示している。
次に、図9(b)に示す撮像素子蓄積スローシャッターモードの動作について説明する。
最後に、図9(c)に示すメモリ蓄積スローシャッターモードの動作について説明する。
次に、本発明の第5の実施形態について説明する。
最初に、図10(a)に示す通常撮影モードの動作について説明する。まず、撮像素子102は、蓄積時間T1の間、被写体からの光を光電変換して電荷を蓄積し、蓄積時間T1終了後、1ラインおきに蓄積した電荷信号を読み出すことにより1フィールド分の電荷信号を撮像素子102からCDS・A/D103を介して第1フィールドメモリ210a及び第2フィールドメモリ210bに交互に読み出す動作を繰り返し行う。以降、直前の蓄積時間T1で蓄積した画像信号を読み出したラインと異なるラインの信号を読み出すことで、1フィールド分の画像信号(例えば、図10(a)の「1奇」、「2偶」、「3奇」、「4偶」等)を第1フィールドメモリ210a及び第2フィールドメモリ210bに交互に記憶する。ここで、「奇」は奇数フィールドを、「偶」は偶数フィールドを示している。
次に、図10(b)に示す撮像素子蓄積スローシャッターモードの動作について説明する。
最後に、図10(c)に示すメモリ蓄積スローシャッターモードの動作について説明する。
なお、本発明は、複数の機器(例えばホストコンピュータ、インターフェイス機器、カメラヘッドなど)から構成されるシステムに適用しても、一つの機器からなる装置(例えば、デジタルビデオカメラ、デジタルスチルカメラ、カメラ付き形態端末など)に適用してもよい。
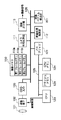
102 撮像素子
103 CDS・A/D回路
104 ラインメモリ
105 角速度センサ
110 画像メモリ
111 カメラ信号処理回路
112 画像処理回路
113 映像出力回路113
120 CPU
121 バスブリッジ
123 フラッシュメモリ
124 CPUメモリ
125 CPUバス
126 画像バス
801 画像ベクトル検出部
Claims (11)
- 撮像手段を有する撮像装置であって、
前記撮像手段を露光し、所定周期で画像を読み出す駆動手段と、
前記所定周期で読み出された複数の画像の相関に基づいて、前記複数の画像それぞれからその一部を選択することにより画像間のぶれを補正するぶれ補正手段と、
前記ぶれ補正手段で画像間のぶれが補正された前記複数の画像のそれぞれを1枚の画像として、前記所定周期で逐次出力する第1の制御手段と、
前記ぶれ補正手段で画像間のぶれが補正された前記複数の画像のうち、前記所定周期で、最新のn(nは2以上の自然数)周期分の画像を加算して1枚の画像を生成し、該生成した画像を前記所定周期で逐次出力する第2の制御手段と
を有することを特徴とする撮像装置。 - 測光手段と、
前記第1の制御手段により画像を出力するか、もしくは前記第2の制御手段により画像を出力するかを前記測光手段による測光の結果に応じて切り換える切り換え手段と
を更に有することを特徴とする請求項1に記載の撮像装置。 - 前記第2の制御手段は、前記測光手段による測光の結果に応じて、前記nを決定することを特徴とする請求項2に記載の撮像装置。
- 前記駆動手段は、撮像手段からプログレッシブ読み出しを行うことを特徴とする請求項1乃至3のいずれか1項に記載の撮像装置。
- 前記駆動手段は、撮像手段からインターレース読み出しを行い、前記第2の制御手段はいずれか一方のフィールドの画像を前記所定周期で読み出すように制御するとともに、前記最新のn(nは2以上の自然数)周期分の画像を加算して得られた、前記所定周期で逐次出力される画像の内、1所定周期おきに得られる画像に基づいて他方のフィールドの画像を生成し、当該生成した画像と、前記加算して得られた画像とを前記所定周期で交互に出力するように制御することを特徴とする請求項1乃至3のいずれか1項に記載の撮像装置。
- 前記撮像装置のぶれ量を検出するぶれ量検出手段をさらに有し、
前記ぶれ補正手段は、前記ぶれ量検出手段により検出されたぶれ量に応じて、前記各画像から選択する部分を決定することを特徴とする請求項1乃至5のいずれか1項に記載の撮像装置。 - 前記ぶれ量検出手段は、角速度センサであることを特徴とする請求項6に記載の撮像装置。
- 前記ぶれ量検出手段は、前記複数の画像間における動きベクトルを検出することでぶれ量を検出することを特徴とする請求項6に記載の撮像装置。
- 撮像手段を有する撮像装置の制御方法であって、
前記撮像手段を露光し、所定周期で画像を読み出す撮像工程と、
前記所定周期で読み出された複数の画像の相関に基づいて、前記複数の画像それぞれからその一部を選択することにより画像間のぶれを補正するぶれ補正工程と、
前記ぶれ補正工程で画像間のぶれが補正された前記複数の画像のそれぞれを1枚の画像として、前記所定周期で逐次出力する第1の出力工程と、
前記ぶれ補正工程で画像間のぶれが補正された前記複数の画像のうち、前記所定周期で、最新のn(nは2以上の自然数)周期分の画像を加算して1枚の画像を生成し、該生成した画像を前記所定周期で逐次出力する第2の出力工程と
を有することを特徴とする制御方法。 - 情報処理装置に、請求項9に記載の制御方法の各工程を実行させるためのプログラム。
- 請求項10に記載のプログラムを格納したことを特徴とする情報処理装置が読み取り可能な記憶媒体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004377241A JP4390274B2 (ja) | 2004-12-27 | 2004-12-27 | 撮像装置及び制御方法 |
| CNB200510023070XA CN100438576C (zh) | 2004-12-27 | 2005-12-26 | 摄像装置和控制方法 |
| US11/320,307 US7509039B2 (en) | 2004-12-27 | 2005-12-27 | Image sensing apparatus with camera shake correction function |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004377241A JP4390274B2 (ja) | 2004-12-27 | 2004-12-27 | 撮像装置及び制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006186593A JP2006186593A (ja) | 2006-07-13 |
| JP2006186593A5 JP2006186593A5 (ja) | 2008-02-21 |
| JP4390274B2 true JP4390274B2 (ja) | 2009-12-24 |
Family
ID=36611643
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004377241A Expired - Fee Related JP4390274B2 (ja) | 2004-12-27 | 2004-12-27 | 撮像装置及び制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7509039B2 (ja) |
| JP (1) | JP4390274B2 (ja) |
| CN (1) | CN100438576C (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4136793B2 (ja) * | 2003-05-29 | 2008-08-20 | キヤノン株式会社 | 撮像装置および撮像装置の制御方法 |
| US7714890B2 (en) * | 2005-04-26 | 2010-05-11 | Olympus Imaging Corp. | Image pickup apparatus and method for controlling pixel reading using a shake determination |
| US7593040B2 (en) * | 2006-01-30 | 2009-09-22 | Omnivision Technologies, Inc. | Image anti-shake in digital cameras |
| JP4483841B2 (ja) | 2006-09-06 | 2010-06-16 | カシオ計算機株式会社 | 撮像装置 |
| TW200926765A (en) * | 2007-12-14 | 2009-06-16 | Altek Corp | Method for processing an interlaced scanning image |
| JP4887275B2 (ja) * | 2007-12-27 | 2012-02-29 | 富士フイルム株式会社 | 撮像装置及びそのシャッタ駆動モード選択方法 |
| JP4656168B2 (ja) * | 2008-03-05 | 2011-03-23 | カシオ計算機株式会社 | 画像合成装置 |
| WO2009145201A1 (ja) * | 2008-05-27 | 2009-12-03 | 三洋電機株式会社 | 画像処理装置、画像処理方法及び撮像装置 |
| JP5159461B2 (ja) * | 2008-06-20 | 2013-03-06 | 三洋電機株式会社 | 画像処理装置、画像処理方法及び撮像装置 |
| JP5548552B2 (ja) * | 2010-08-03 | 2014-07-16 | キヤノン株式会社 | 撮像装置 |
| US9762848B2 (en) * | 2013-03-15 | 2017-09-12 | Google Inc. | Automatic adjustment of video orientation |
| JP6341691B2 (ja) * | 2014-02-26 | 2018-06-13 | キヤノン株式会社 | 像振れ補正装置およびその制御方法、光学機器、撮像装置 |
| KR101689665B1 (ko) * | 2014-07-04 | 2016-12-26 | 삼성전자 주식회사 | 이미지 센서, 이미지 센싱 방법, 그리고 이미지 센서를 포함하는 이미지 촬영 장치 |
| US9860447B1 (en) * | 2014-09-29 | 2018-01-02 | Apple Inc. | Calibration of optical image stabilization module with motion sensor using image comparisons |
| CN107534722B (zh) * | 2015-03-31 | 2019-09-20 | 华为技术有限公司 | 一种终端设备和拍照的方法 |
| US9912868B2 (en) * | 2015-09-15 | 2018-03-06 | Canon Kabushiki Kaisha | Image-blur correction apparatus, tilt correction apparatus, method of controlling image-blur correction apparatus, and method of controlling tilt correction apparatus |
| WO2017090986A1 (en) * | 2015-11-23 | 2017-06-01 | Samsung Electronics Co., Ltd. | Electronic apparatus and method for controlling electronic apparatus thereof |
| CN105847686B (zh) * | 2016-04-01 | 2019-10-15 | Oppo广东移动通信有限公司 | 控制方法、控制装置及电子装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3200089B2 (ja) * | 1991-06-21 | 2001-08-20 | キヤノン株式会社 | 動きベクトル検出装置及び振れ補正装置 |
| JP3103897B2 (ja) * | 1991-03-19 | 2000-10-30 | ソニー株式会社 | 手振れ補正装置および手振れ補正方法 |
| JP3581374B2 (ja) | 1992-09-09 | 2004-10-27 | キヤノン株式会社 | 撮像装置 |
| JPH0698246A (ja) | 1992-09-11 | 1994-04-08 | Canon Inc | 振れ補正装置 |
| JPH09261526A (ja) * | 1996-03-19 | 1997-10-03 | Olympus Optical Co Ltd | 撮像装置 |
| JPH1175106A (ja) * | 1997-08-27 | 1999-03-16 | Toshiba Corp | 静止画カメラ |
| JPH11252445A (ja) | 1998-02-26 | 1999-09-17 | Sony Corp | 撮像装置 |
| JP2000224470A (ja) * | 1999-02-02 | 2000-08-11 | Minolta Co Ltd | カメラシステム |
| JP4094253B2 (ja) * | 2001-07-12 | 2008-06-04 | オリンパス株式会社 | 撮像装置 |
| US20030076408A1 (en) * | 2001-10-18 | 2003-04-24 | Nokia Corporation | Method and handheld device for obtaining an image of an object by combining a plurality of images |
| US7379094B2 (en) * | 2002-04-18 | 2008-05-27 | Olympus Corporation | Electronic still imaging apparatus and method having function for acquiring synthesis image having wide-dynamic range |
| US7352390B2 (en) * | 2003-10-08 | 2008-04-01 | Hewlett-Packard Development Company, L.P. | Digital camera for capturing image data with rapid response between activating a capture trigger and capturing image data |
| JP4522207B2 (ja) * | 2004-09-17 | 2010-08-11 | キヤノン株式会社 | カメラシステム、カメラ本体及び交換レンズ |
-
2004
- 2004-12-27 JP JP2004377241A patent/JP4390274B2/ja not_active Expired - Fee Related
-
2005
- 2005-12-26 CN CNB200510023070XA patent/CN100438576C/zh not_active Expired - Fee Related
- 2005-12-27 US US11/320,307 patent/US7509039B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20060140604A1 (en) | 2006-06-29 |
| CN1798263A (zh) | 2006-07-05 |
| US7509039B2 (en) | 2009-03-24 |
| JP2006186593A (ja) | 2006-07-13 |
| CN100438576C (zh) | 2008-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4434939B2 (ja) | 撮像装置及びその制御方法 | |
| JP4390274B2 (ja) | 撮像装置及び制御方法 | |
| US8848097B2 (en) | Image processing apparatus, and method, for providing special effect | |
| US8072497B2 (en) | Imaging apparatus and recording medium | |
| JP4441919B2 (ja) | 撮像装置及びそのプログラム | |
| EP1856909B1 (en) | Moving image playback device with camera-shake correction function | |
| JP4473363B2 (ja) | 手振れ補正装置およびその補正方法 | |
| JP2006317848A (ja) | 静止画撮像装置 | |
| JP2011135152A (ja) | 撮像装置及び撮像方法 | |
| JP2009077272A (ja) | 撮像装置及びそのプログラム | |
| JP2009194770A (ja) | 撮像装置、動画再生装置及びそのプログラム | |
| JP4748375B2 (ja) | 撮像装置、画像再生装置及びそのプログラム | |
| JP2006030972A (ja) | 撮像装置及び撮像方法 | |
| EP3799416B1 (en) | Image processing apparatus and method, and image capturing apparatus | |
| JP6360409B2 (ja) | 撮像装置、撮像方法 | |
| JP5131554B2 (ja) | 撮像装置、及びプログラム | |
| JP4781147B2 (ja) | 撮像装置及び画像処理方法 | |
| JP2007214666A (ja) | 動画撮影機能付デジタルカメラ | |
| JP6797566B2 (ja) | 撮像装置、撮像装置の制御方法、および、画像処理装置 | |
| JP6385114B2 (ja) | 撮像装置およびその制御方法 | |
| JP2007274731A (ja) | 手振れ補正方法 | |
| JP2016140057A (ja) | 撮像装置 | |
| JPH10164412A (ja) | ディジタルスチルカメラ | |
| JP2016134892A (ja) | 撮像装置 | |
| JP2010093492A (ja) | 撮像装置および撮像装置用プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071226 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071226 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20071226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090624 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090706 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090903 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091002 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091005 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121016 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4390274 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131016 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |