JP5548552B2 - 撮像装置 - Google Patents
撮像装置 Download PDFInfo
- Publication number
- JP5548552B2 JP5548552B2 JP2010174526A JP2010174526A JP5548552B2 JP 5548552 B2 JP5548552 B2 JP 5548552B2 JP 2010174526 A JP2010174526 A JP 2010174526A JP 2010174526 A JP2010174526 A JP 2010174526A JP 5548552 B2 JP5548552 B2 JP 5548552B2
- Authority
- JP
- Japan
- Prior art keywords
- line
- frame
- image
- predetermined frame
- output
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
- H04N25/53—Control of the integration time
- H04N25/531—Control of the integration time by controlling rolling shutters in CMOS SSIS
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/689—Motion occurring during a rolling shutter mode
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
Description
例えば、レンズ交換式のデジタルカメラの一部には、レンズで撮影可能な画角を画像として記録できることを大きな利点としているものがある。また、レンズ一体型のデジタルカメラの一部でも、広角側の焦点距離が短く被写体をワイドに撮影できることを大きな利点としているものがある。しかし、画像の一部を切り出してしまうと、こうしたカメラの特徴を活かせなくなってしまう。さらには、画像の一部を切り出してしまうと、撮像センサの有効画素数が減ってしまうため、補正を行わない場合に比べて、高精細な画像を撮影することができない。
図1は本発明の実施形態におけるビデオカメラ100の構成例を示すブロック図である。
次に、本発明の第2の実施形態について説明する。
次に、本発明の第3の実施例について説明する。
本実施例のビデオカメラも、図1のビデオカメラ100と同じ構成であるため、その説明を省略する。
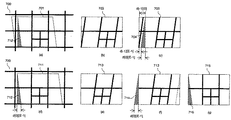
図10はビデオカメラ100が上方向に動いた場合に(チルティング)、動き検出部110が時間経過(横軸)に対して検出した垂直方向の動き量(縦軸)の例を示す。動き検出部110は撮像センサ105から1フレーム分の画像信号が出力される期間に、複数回(図中の黒丸部分)垂直方向の動き量dを検出する。ここで、動き量dはフレーム0のライン0の撮影時刻を基準として、それに対する各ラインの撮影時刻における相対位置を下方向を正とする符号付きで表す。フレーム0の任意のラインeの出力時の動き量d[0][e]は、上記複数の検出結果を用いた補間から求められる。例えば、フレーム0の有効画像の終端ラインE−1の出力時の動き量はd[0][E−1]となる。
次に、本発明の第5の実施形態について説明する。
本実施例においては、歪み補正部108は先頭ラインでなく中間ラインを基準として、同一フレームの他のラインの撮影範囲のずれを補正する。
Claims (10)
- ローリングシャッタ方式で複数のフレームを連続して撮影する撮影手段と、前記撮影された複数のフレームの撮影画像を格納する記憶手段と、フレーム間の動き量を検出する動き検出手段と、前記記憶手段に格納された撮影画像を補正する補正手段と、前記補正手段で補正された画像を出力する出力手段とを備え、
前記補正手段は、前記撮影画像の所定のフレームの各ラインの撮影時刻における動き量に基づいて、出力する画像の各ラインの画素を前記所定のフレームのどこから読み出すかを決定し、決定された読み出し位置が前記所定のフレームの撮影範囲を超えている画素に対しては、前記所定のフレームの前後に撮影されたフレームから対応する画素を読み出すことで前記撮影画像を補正することを特徴とする撮像装置。 - 前記補正手段は、前記対応する画素の読み出し位置を、当該対応する画素が読み出されるフレームの各ラインの撮影時刻における動き量に基づいて算出することを特徴とする請求項1に記載の撮像装置。
- 前記補正手段は、前記所定のフレームの先頭ラインの撮影時刻を基準として、各ラインの撮影時刻における動き量に基づいて、前記出力する画像の各ラインの画素を前記所定のフレームのどこから読み出すかを決定し、
前記決定された読み出し位置が前記所定のフレームの撮影範囲を超えている画素に対しては、前記所定のフレームの1つ前に撮影されたフレームから対応する画素を読み出すことを特徴とする請求項1または2に記載の撮像装置。 - 前記補正手段は、前記出力する画像の各ラインの画素の決定された読み出し位置が、前記所定のフレーム及び前記所定のフレームの前後に撮影されたフレームの撮影範囲を超えている場合、前記撮影範囲を超えない範囲で前記ラインの読み出し位置を決定し、前記ラインの読み出し位置から前記画素の読み出し位置を算出することを特徴とする請求項1または2に記載の撮像装置。
- 前記補正手段は、前記所定のフレームの中間ラインの撮影時刻を基準として、各ラインの撮影時刻における動き量に基づいて、前記出力する画像の各ラインの画素を前記所定のフレームのどこから読み出すかを決定し、
前記決定された読み出し位置が前記所定のフレームの撮影範囲を超えている画素に対しては、前記画素のラインが出力画像の中間ラインより前か後ろかに応じて、前記フレームの1つ前又は1つ後に撮影されたフレームから読み出すことを特徴とする請求項1または2に記載の撮像装置。 - 前記補正手段は、前記所定のフレームの各ラインの撮影時刻における動き量に基づいて、前記出力する画像の各ラインの画素を前記所定のフレームのどこから読み出すかを決定し、
前記決定された読み出し位置が前記所定のフレームの撮影範囲の境界近傍にある画素に対しては、前記所定のフレームから読み出した画素と、前記所定のフレームの前後に撮影されたフレームから読み出した画素とを前記境界からの距離に応じた比率で合成し、前記所定のフレームの前後に撮影されたフレームからの画素の読み出し位置を、当該フレームの各ラインの撮影時刻における動き量から算出することを特徴とする請求項1または2に記載の撮像装置。 - 複数回継続した検出で得られた動き量に基づいて、装置本体がパンニングまたはチルティングしているかどうかを判定する判別手段を備え、
前記補正手段は前記装置本体がパンニングまたはチルティングしている場合のみ、前記検出された動き量に基づいて撮影画像を前記記憶手段からの読み出すことを特徴とする請求項1ないし6の何れか1項に記載の撮像装置。 - ローリングシャッタ方式で複数のフレームを連続して撮影する撮影手段と、撮影された複数のフレームの撮影画像を格納する記憶手段と、フレーム間の動き量を検出する動き検出手段とを備える撮像装置の制御方法であり、
前記記憶手段に格納された撮影画像を補正する補正ステップと、前記補正ステップで補正された画像を出力する出力ステップとを備え、
前記補正ステップは、前記撮影画像の所定のフレームの各ラインの撮影時刻における動き量に基づいて、出力する画像の各ラインの画素を前記所定のフレームのどこから読み出すかを決定するステップと、
決定された読み出し位置が前記所定のフレームの撮影範囲を超えている画素に対しては、前記所定のフレームの前後に撮影されたフレームから対応する画素を読み出すことで前記撮影画像を補正することを特徴とする撮像装置の制御方法。 - コンピュータを、ローリングシャッタ方式で複数のフレームを連続して撮影する撮影手段と撮影された複数のフレームの撮影画像を格納する記憶手段と、フレーム間の動き量を検出する動き検出手段とを備える撮像装置において、
前記撮影画像の所定のフレームの各ラインの撮影時刻における動き量に基づいて、出力する画像の各ラインの画素を前記所定のフレームのどこから読み出すかを決定し、決定された読み出し位置が前記所定のフレームの撮影範囲を超えている画素に対しては、前記所定のフレームの前後に撮影されたフレームから対応する画素を読み出すように前記記憶手段に格納された撮影画像を補正する補正手段と、前記補正手段により補正された画像を出力する出力手段として機能させるためのプログラム。 - 請求項9のプログラムを記録したコンピュータが読み取り可能な記録媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010174526A JP5548552B2 (ja) | 2010-08-03 | 2010-08-03 | 撮像装置 |
| US13/178,713 US8462219B2 (en) | 2010-08-03 | 2011-07-08 | Image pickup apparatus and image processing method of a picked-up image |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010174526A JP5548552B2 (ja) | 2010-08-03 | 2010-08-03 | 撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012039177A JP2012039177A (ja) | 2012-02-23 |
| JP2012039177A5 JP2012039177A5 (ja) | 2013-08-15 |
| JP5548552B2 true JP5548552B2 (ja) | 2014-07-16 |
Family
ID=45555885
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010174526A Expired - Fee Related JP5548552B2 (ja) | 2010-08-03 | 2010-08-03 | 撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8462219B2 (ja) |
| JP (1) | JP5548552B2 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5734082B2 (ja) * | 2011-05-11 | 2015-06-10 | キヤノン株式会社 | 撮像装置及びその制御方法、並びにプログラム |
| KR101856947B1 (ko) | 2011-10-07 | 2018-05-11 | 삼성전자주식회사 | 촬영장치, 움직임 추정장치, 영상 보정 방법, 움직임 추정방법 및 컴퓨터 판독가능 기록매체 |
| JP5794705B2 (ja) * | 2013-02-01 | 2015-10-14 | キヤノン株式会社 | 撮像装置、その制御方法及びプログラム |
| KR102003460B1 (ko) | 2013-08-27 | 2019-07-24 | 한화테크윈 주식회사 | 왜곡제거장치 및 방법 |
| KR101627795B1 (ko) * | 2014-12-24 | 2016-06-08 | 전자부품연구원 | 키-프레임과 자이로 스코프를 이용한 롤링-셔터 보정 방법 및 이를 적용한 촬영장치 |
| KR101668680B1 (ko) * | 2015-05-08 | 2016-10-24 | (주)이즈미디어 | 영상 캡처 방법 및 장치 |
| JP2017038281A (ja) * | 2015-08-11 | 2017-02-16 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| JP6882083B2 (ja) * | 2017-06-07 | 2021-06-02 | キヤノン株式会社 | 画像処理装置、画像形成装置、画像処理方法及びプログラム |
| US10810751B2 (en) * | 2017-06-23 | 2020-10-20 | Panasonic Intellectual Property Corporation Of America | Distance measuring apparatus and distance measuring method |
| JP6956031B2 (ja) * | 2017-06-23 | 2021-10-27 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 距離測定装置および距離測定方法 |
| JP2019054360A (ja) * | 2017-09-14 | 2019-04-04 | セイコーエプソン株式会社 | 電子機器、モーションセンサー、位置変化検出プログラムおよび位置変化検出方法 |
| CN110651299A (zh) * | 2018-02-28 | 2020-01-03 | 深圳市大疆创新科技有限公司 | 图像的水波纹检测方法及其装置、无人机和存储装置 |
| US20200137336A1 (en) * | 2018-10-30 | 2020-04-30 | Bae Systems Information And Electronic Systems Integration Inc. | Interlace image sensor for low-light-level imaging |
| CN114390188B (zh) * | 2020-10-22 | 2023-05-12 | 华为技术有限公司 | 一种图像处理方法和电子设备 |
| US12335594B2 (en) * | 2021-10-21 | 2025-06-17 | Raytheon Company | Single camera time-delay to enforce data transmission compliance in real and near real time video |
| JP2024093375A (ja) * | 2022-12-27 | 2024-07-09 | 浜松ホトニクス株式会社 | 試料観察装置及び試料観察方法 |
| US12470605B2 (en) | 2023-04-19 | 2025-11-11 | Raytheon Company | Enforcement of offline and real time data capture and transmission compliance using a ground truth map (GTM) |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3925415B2 (ja) * | 2003-01-22 | 2007-06-06 | ソニー株式会社 | 画像処理装置および方法、記録媒体、並びにプログラム |
| JP3804617B2 (ja) * | 2003-02-14 | 2006-08-02 | コニカミノルタフォトイメージング株式会社 | 画像処理装置及び方法 |
| US7499081B2 (en) * | 2003-04-30 | 2009-03-03 | Hewlett-Packard Development Company, L.P. | Digital video imaging devices and methods of processing image data of different moments in time |
| JP2005077886A (ja) * | 2003-09-02 | 2005-03-24 | Canon Inc | 撮影装置 |
| JP3829843B2 (ja) * | 2003-12-08 | 2006-10-04 | ソニー株式会社 | 画像処理装置 |
| JP4389779B2 (ja) * | 2004-12-27 | 2009-12-24 | ソニー株式会社 | 撮像画像信号の歪み補正方法および撮像画像信号の歪み補正装置 |
| JP4390274B2 (ja) * | 2004-12-27 | 2009-12-24 | キヤノン株式会社 | 撮像装置及び制御方法 |
| JP4390068B2 (ja) | 2004-12-28 | 2009-12-24 | ソニー株式会社 | 撮像画像信号の歪み補正方法および撮像画像信号の歪み補正装置 |
| US7656428B2 (en) * | 2005-05-05 | 2010-02-02 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Imaging device employing optical motion sensor as gyroscope |
| US7728909B2 (en) * | 2005-06-13 | 2010-06-01 | Seiko Epson Corporation | Method and system for estimating motion and compensating for perceived motion blur in digital video |
| JP2007020045A (ja) | 2005-07-11 | 2007-01-25 | Sanyo Electric Co Ltd | 電子カメラ |
| JP4446193B2 (ja) * | 2005-11-11 | 2010-04-07 | ソニー株式会社 | 画像処理装置および方法、並びにプログラム |
| JP4509917B2 (ja) * | 2005-11-21 | 2010-07-21 | 株式会社メガチップス | 画像処理装置及びカメラシステム |
| US8503817B2 (en) * | 2006-03-01 | 2013-08-06 | Panasonic Corporation | Apparatus, method and imaging apparatus for correcting distortion of image data using interpolation |
| JP4743007B2 (ja) * | 2006-06-16 | 2011-08-10 | ソニー株式会社 | 画像処理装置および画像処理方法、記録媒体、並びに、プログラム |
| JP4268220B2 (ja) * | 2007-08-03 | 2009-05-27 | パナソニック株式会社 | 撮影装置、撮影方法、およびプログラム |
| JP2009141717A (ja) * | 2007-12-07 | 2009-06-25 | Hitachi Ltd | 撮像装置 |
| US8253812B2 (en) * | 2008-02-23 | 2012-08-28 | Sanyo Electric Co., Ltd. | Video camera which adopts a focal-plane electronic shutter system |
| US8223236B2 (en) * | 2008-07-03 | 2012-07-17 | Sony Ericsson Mobile Communications Ab | Apparatus and method for image recording |
| JP2010136302A (ja) * | 2008-12-08 | 2010-06-17 | Sony Corp | 撮像装置、撮像方法、およびプログラム |
| JP5778469B2 (ja) * | 2011-04-28 | 2015-09-16 | 日本アビオニクス株式会社 | 撮像装置、画像生成方法、赤外線カメラシステム及び交換可能なレンズシステム |
-
2010
- 2010-08-03 JP JP2010174526A patent/JP5548552B2/ja not_active Expired - Fee Related
-
2011
- 2011-07-08 US US13/178,713 patent/US8462219B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012039177A (ja) | 2012-02-23 |
| US20120033098A1 (en) | 2012-02-09 |
| US8462219B2 (en) | 2013-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5548552B2 (ja) | 撮像装置 | |
| JP4662880B2 (ja) | 撮像装置,及び撮像方法 | |
| JP5794705B2 (ja) | 撮像装置、その制御方法及びプログラム | |
| JP4446193B2 (ja) | 画像処理装置および方法、並びにプログラム | |
| JP6385212B2 (ja) | 画像処理装置及び方法、撮像装置、及び画像生成装置 | |
| TWI467313B (zh) | 影像處理裝置、影像處理方法、及記錄媒體 | |
| JP5572700B2 (ja) | 撮像装置及び撮像方法 | |
| JP6752685B2 (ja) | 撮像装置、撮像方法およびプログラム | |
| JP4435228B2 (ja) | 撮像装置、およびその制御方法 | |
| JP6786311B2 (ja) | 画像処理装置、画像処理方法、コンピュータプログラムおよび記憶媒体 | |
| JP6789682B2 (ja) | 撮像装置、その制御方法、及びプログラム | |
| JP2021185689A (ja) | 撮像装置、プログラム、記録媒体、及び制御方法 | |
| JP2009135713A (ja) | 撮像装置のブレで生じる画像歪みの補正方法及び装置 | |
| JP7672809B2 (ja) | 撮像装置、撮像方法、プログラムおよび記録媒体 | |
| JP6961423B2 (ja) | 画像処理装置、撮像装置、画像処理装置の制御方法、プログラムおよび記録媒体 | |
| JP7608104B2 (ja) | 画像処理装置および撮像装置 | |
| JP4125331B2 (ja) | 撮像装置及びその制御方法 | |
| JP5105844B2 (ja) | 撮像装置及び方法 | |
| JP2004363857A (ja) | 画像歪み補正機能付き撮像装置 | |
| JP2015233211A (ja) | 撮像装置およびその制御方法ならびにプログラム | |
| JP2019168661A (ja) | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 | |
| JP6797566B2 (ja) | 撮像装置、撮像装置の制御方法、および、画像処理装置 | |
| JP2009182657A (ja) | 撮像装置における動画撮像データのブレ検出方法とブレ補正装置 | |
| JP5157757B2 (ja) | 電子カメラ | |
| JP6953594B2 (ja) | 画像処理装置、撮像装置、画像処理方法、プログラムおよび記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20120730 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20120731 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20120831 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20130701 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130702 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130702 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140417 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140519 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5548552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |