JP4345708B2 - 車両用電子制御装置 - Google Patents
車両用電子制御装置 Download PDFInfo
- Publication number
- JP4345708B2 JP4345708B2 JP2005130416A JP2005130416A JP4345708B2 JP 4345708 B2 JP4345708 B2 JP 4345708B2 JP 2005130416 A JP2005130416 A JP 2005130416A JP 2005130416 A JP2005130416 A JP 2005130416A JP 4345708 B2 JP4345708 B2 JP 4345708B2
- Authority
- JP
- Japan
- Prior art keywords
- level
- signal
- microcomputer
- power supply
- timer circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/26—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using computer, e.g. microprocessor
- F02D41/266—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using computer, e.g. microprocessor the computer being backed-up or assisted by another circuit, e.g. analogue
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/22—Safety or indicating devices for abnormal conditions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/04—Introducing corrections for particular operating conditions
- F02D41/042—Introducing corrections for particular operating conditions for stopping the engine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M25/00—Engine-pertinent apparatus for adding non-fuel substances or small quantities of secondary fuel to combustion-air, main fuel or fuel-air mixture
- F02M25/08—Engine-pertinent apparatus for adding non-fuel substances or small quantities of secondary fuel to combustion-air, main fuel or fuel-air mixture adding fuel vapours drawn from engine fuel reservoir
- F02M25/0809—Judging failure of purge control system
- F02M25/0827—Judging failure of purge control system by monitoring engine running conditions
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Test And Diagnosis Of Digital Computers (AREA)
- Power Sources (AREA)
- Debugging And Monitoring (AREA)
Description
(a)主電源回路は、イグニッションスイッチのオン/オフに応じたスイッチ信号と、電子制御装置の内部で発生される電源起動信号との何れかがアクティブレベルの場合に、電源電圧Vmを出力するように構成される。
即ち、まず第1の診断処理では、タイマ回路への電源保持信号をアクティブレベルから非アクティブレベルにすることにより、タイマ回路からの電源起動信号の出力レベルをアクティブレベルから非アクティブレベルに変化させて、モニタ用信号ラインのレベルがアクティブレベルから非アクティブレベルに変化するか否かを判定する。
つまり、タイマ回路からの電源起動信号が、マイコンからタイマ回路への電源保持信号に応答してアクティブレベルから非アクティブレベルに変化しなくなる故障が生じているならば、第1の診断処理により、モニタ用信号ラインのレベルが非アクティブレベルに変化しないと異常判定されることとなる。
また、タイマ回路からの電源起動信号が、マイコンからタイマ回路への電源保持信号に応答して非アクティブレベルからアクティブレベルに変化しなくなる故障が生じている場合には、その電源保持信号によって主給電手段からマイコンへの電源供給を強制的に継続させることができなくなる。よって、起動用スイッチ信号が非アクティブレベルになると、マイコンが動作を停止するまでに実施しなければならない処理(例えば、タイマ回路の記憶部に次の起動までの休止時間Twに相当する設定値を書き込んで、タイマ回路のカウンタをスタートさせたり、データを退避させる処理等)を完了する前に、そのマイコンへの電源供給が遮断されてしまい、車両用電子制御装置の正常な動作が実現できなくなる。しかし、このような故障の発生は、第4の診断処理で事前に検知することができる。
また、マイコンは、上記比較結果信号を非アクティブレベルからアクティブレベルに変化させる操作として、請求項4に記載のように、タイマ回路の記憶部に通常時とは異なるテスト用の設定値を書き込むと共に、カウンタをリスタートさせる、という操作を行うように構成しても良い。つまり、その操作を実施してからテスト用の設定値に相当する時間Taが経過すると、カウンタのカウント値が記憶部内の設定値と一致して比較結果信号がアクティブレベルになるため、第2の診断処理では、そのタイミングを見計らって、モニタ用信号ラインのレベルがアクティブレベルに変化したか否かを判定すれば良い。
図1に示すように、ECU1は、エンジンを制御するための各種処理を実行するマイコン3と、マイコン3から出力される制御信号に応じてエンジンの制御に関わる電気負荷Lを駆動する負荷駆動回路4と、マイコン3が動作を停止している時間を計測してマイコン3を自動的に起動させるタイマIC(ソークタイマユニット)5と、マイコン3を動作させるための主電源電圧Vmを出力する主電源回路7m及びタイマIC5を動作させるための副電源電圧Vsを出力する副電源回路7sを有した電源部7とを備えている。
(A)マイコン3から通信線31を介して“タイマスタート指令”を受けると、カウンタ値を0にリセットして、カウンタ21をスタート(つまり、リスタート)させる。
(C)比較回路27は、マイコン3から通信線31を介して“出力リセット指令”を受けると、比較結果信号Si3の出力レベルをローレベルにリセットする。
また、本実施形態のECU1において、マイコン3には、タイマIC5から出力される電源起動信号Si2をモニタするためのモニタ用信号ライン33が接続されている。つまり、マイコン3は、そのモニタ用信号ライン33から入力される信号Simによって、タイマIC5からメインリレー駆動回路15へ出力されている電源起動信号Si2のレベルを検知するようになっている。更に、マイコン3には、IGSW信号Si1もバッファ回路35を介して入力されるようになっている。また、図示は省略しているが、マイコン3には、エンジンの水温を検出する水温センサからの信号や、車両の走行速度(車速)を検出する車速センサからの信号など、車両の運転状態を検出するための各種信号も入力されるようになっている。
次に、マイコン3で実行される処理について説明する。
図2に示すように、マイコン3は、主電源回路7mからの主電源電圧Vmを受けて動作を開始すると、まずS110にて、タイマIC5への電源保持信号Si4をハイレベルにする。これは、タイマIC5からメインリレー駆動回路15への電源起動信号Si2がタイマIC5内の比較結果信号Si3に関わらずハイレベルとなるようにして、IGSW11のオン/オフに関わらずメインリレー13から本ECU1にバッテリ電圧VPが供給される状態であって、主電源回路7mから主電源電圧Vmが出力される状態(即ち、当該マイコン3及び本ECU1が動作可能な状態)を確保するためである。尚、マイコン3の起動=本ECU1の起動であり、メインリレー13を介して供給されるバッテリ電圧VPが、本ECU1が動作するための動作用電源になっている。
S130では、エンジンを制御するための制御処理(燃料噴射制御処理や点火制御処理など)を実施する。また、マイコン3は、その制御処理の実施中に、後述するソークタイマ機能故障診断用の処理(図7,図8)を1回或いは複数回実施する。尚、そのソークタイマ機能故障診断用の処理は、タイマIC5の機能が正常であるか否かを診断するための処理である。更に、マイコン3は、制御処理の実施中においても、IGSW11のオン/オフ状態を判定しており、IGSW11がオフされたことを検知したならば、エンジン停止時用の処理を実施して、その後、S140に移行する。
尚、エバポ診断処理の内容としては、前述したように、エンジンの燃料タンクからのエバポガスを回収するための系をアクチュエータにより閉塞して加圧又は減圧し、その系内の圧力変動をセンサにより検出して当該系の気密性を検査する、といったものである。また、エバポ診断処理の診断結果は、例えば、マイコン3の内部又は外部に設けられたデータ書換可能な不揮発性メモリ(図示省略)に記憶される。そして、その不揮発性メモリに記憶された診断結果は、ECU1に通信線を介して接続される外部の診断装置へと読み出されたり、異常がある場合には、車両の表示器に表示されたりする。
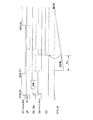
IGSW11がオンされてIGSW信号Si1がハイレベルになると、メインリレー13がオンして、ECU1にバッテリ電圧VPが供給され、主電源回路7mから主電源電圧Vmが出力されてマイコン3が起動する。
その後、上記休止時間Twが経過すると、タイマIC5にて、カウンタ値がレジスタ25内の設定値と一致し、比較回路27からの比較結果信号Si3がハイレベルになり、それに伴い、タイマIC5からの電源起動信号Si2がハイレベルとなって、メインリレー13がオンする。そして、ECU1にバッテリ電圧VPが供給されて、マイコン3が再び起動する。
そして、その後、IGSW11がオンされると、再びメインリレー13がオンして、前述したようにマイコン3が起動することとなる。
また、上記S330にて、信号Simがローレベルではないと判定した場合には、S340に進んで、タイマIC5への電源保持信号Si4をローレベルに設定すると共に、タイマIC5へ“出力リセット指令”を送信し、その後、S330へ戻る。つまり、信号SimがローレベルになったとS330で判定するまで、タイマIC5への電源保持信号Si4とタイマIC5内の比較結果信号Si3とをローレベルにするS340の処理を繰り返すのである。
また、本実施形態のECU1において、マイコン3は、図7のS210で車速が規定値以上であると判定した場合に(S200:YES)、S240〜S310の故障診断処理を実施するようになっている。
そして、図11の処理では、図7の処理と比較すると、S230とS240との間にS235の処理が追加されており、更に、S260の代わりにS265の処理が行われる。尚、図11において、図7と同じ処理については、同じステップ番号を付しているため説明を省略する。
また、本第2実施形態によれば、マイコン3は、IGSW11がオフされたら行う図2のS140及びS150と同様の処理を、図11のS235で行うこととなるため、例えば、その部分のプログラムを共通化して、プログラム全体の簡素化を図ることも可能となる。
Claims (7)
- 車両に搭載された制御対象機器を制御するマイコンを備えた車両用電子制御装置であり、更に、
外部から入力される所定の起動用スイッチ信号と当該車両用電子制御装置内部で発生される電源起動信号との何れかがアクティブレベルの場合に、前記マイコンへ該マイコンを動作させるための電源電圧を出力する主給電手段と、
副給電手段から常時出力される電源電圧を受けて動作すると共に、計時用のカウンタと、そのカウンタのカウント値と比較される設定値が記憶される記憶部とを有したタイマ回路とを備え、
前記起動用スイッチ信号がアクティブレベルから非アクティブレベルに変化して前記主給電手段から電源電圧が出力されなくなると、前記タイマ回路が、前記カウンタにより経過時間を計測し、そのカウンタのカウント値が前記記憶部に記憶された設定値になったら、前記主給電手段への前記電源起動信号をアクティブレベルにして、該主給電手段から電源電圧を出力させることにより前記マイコンを起動させる車両用電子制御装置において、
前記タイマ回路は、前記マイコンによる操作に応じて、前記電源起動信号の出力レベルがアクティブレベルと非アクティブレベルとに変化可能に構成されていると共に、
前記マイコンには、前記タイマ回路から前記主給電手段へ出力される前記電源起動信号をモニタするための信号ラインが接続されており、
前記マイコンは、前記起動用スイッチ信号がアクティブレベルになっている期間中に、前記タイマ回路の故障診断処理として、前記タイマ回路に対し前記電源起動信号の出力レベルをアクティブレベルと非アクティブレベルとのそれぞれに変化させる操作を行うと共に、その操作に応じて前記信号ラインのレベルが変化するか否かを判定する処理を実施すること、
を特徴とする車両用電子制御装置。 - 請求項1に記載の車両用電子制御装置において、
前記タイマ回路は、
前記カウンタのカウント値が前記記憶部内の設定値と一致したらアクティブレベルになり、前記マイコンからのリセット指令を当該タイマ回路が受けると非アクティブレベルになる比較結果信号と、前記マイコンから当該タイマ回路に出力される電源保持信号との、論理和信号を前記電源起動信号として出力すると共に、前記記憶部へは前記マイコンにより設定値が書き込まれるように構成されており、
前記マイコンは、前記故障診断処理として、
前記タイマ回路への前記電源保持信号をアクティブレベルから非アクティブレベルにすることにより、前記タイマ回路からの前記電源起動信号の出力レベルをアクティブレベルから非アクティブレベルに変化させて、前記信号ラインのレベルがアクティブレベルから非アクティブレベルに変化するか否かを判定する第1の診断処理と、
前記タイマ回路の内部で発生する前記比較結果信号を非アクティブレベルからアクティブレベルに変化させることにより、前記タイマ回路からの前記電源起動信号の出力レベルを非アクティブレベルからアクティブレベルに変化させて、前記信号ラインのレベルが非アクティブレベルからアクティブレベルに変化するか否かを判定する第2の診断処理と、
前記タイマ回路の内部で発生する前記比較結果信号をアクティブレベルから非アクティブレベルに変化させることにより、前記タイマ回路からの前記電源起動信号の出力レベルをアクティブレベルから非アクティブレベルに変化させて、前記信号ラインのレベルがアクティブレベルから非アクティブレベルに変化するか否かを判定する第3の診断処理と、
前記タイマ回路への前記電源保持信号を非アクティブレベルからアクティブレベルにすることにより、前記タイマ回路からの前記電源起動信号の出力レベルを非アクティブレベルからアクティブレベルに変化させて、前記信号ラインのレベルが非アクティブレベルからアクティブレベルに変化するか否かを判定する第4の診断処理とを、その順に実施すること、
を特徴とする車両用電子制御装置。 - 請求項2に記載の車両用電子制御装置において、
前記マイコンは、前記タイマ回路の前記記憶部に前記カウンタのカウント値と同じ値の設定値を書き込むことにより、前記比較結果信号を非アクティブレベルからアクティブレベルに変化させること、
を特徴とする車両用電子制御装置。 - 請求項2に記載の車両用電子制御装置において、
前記マイコンは、前記タイマ回路の前記記憶部に通常時とは異なるテスト用の設定値を書き込むと共に、前記カウンタをリスタートさせることにより、前記比較結果信号を非アクティブレベルからアクティブレベルに変化させること、
を特徴とする車両用電子制御装置。 - 請求項2ないし請求項4の何れか1項に記載の車両用電子制御装置において、
前記マイコンは、前記故障診断処理の実施中に前記起動用スイッチ信号がアクティブレベルから非アクティブレベルに変化したことを検知したならば、前記起動用スイッチ信号と前記電源起動信号との両方が非アクティブレベルになってから前記主給電手段が電源電圧の出力を停止するまでの遅延時間以内に、前記タイマ回路への前記電源保持信号と前記タイマ回路の内部で発生する前記比較結果信号とを、前記故障診断処理を開始する前の状態に戻すようになっていること、
を特徴とする車両用電子制御装置。 - 請求項2ないし請求項5の何れか1項に記載の車両用電子制御装置において、
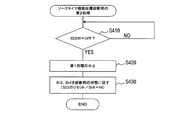
前記マイコンは、前記第1〜第4の診断処理の何れかで異常と判定したならば、その時点で前記故障診断処理を中断して、故障の発生を報知する処理を行うと共に、前記信号ラインのレベルが非アクティブレベルになったと判定するまで、前記タイマ回路への前記電源保持信号と前記タイマ回路の内部で発生する前記比較結果信号とを非アクティブレベルにする処理を繰り返すようになっていること、
を特徴とする車両用電子制御装置。 - 請求項1ないし請求項6の何れか1項に記載の車両用電子制御装置において、
前記起動用スイッチ信号は、前記車両のイグニッションスイッチがオンされているときにアクティブレベルとなるイグニッションスイッチ信号であり、
前記マイコンは、前記車両の走行速度が規定値以上であるか否かを判定して、走行速度が規定値以上である場合に前記故障診断処理を実施すること、
を特徴とする車両用電子制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005130416A JP4345708B2 (ja) | 2005-04-27 | 2005-04-27 | 車両用電子制御装置 |
| US11/412,115 US7155326B2 (en) | 2005-04-27 | 2006-04-27 | Electric control unit |
| DE602006012752T DE602006012752D1 (de) | 2005-04-27 | 2006-04-27 | Elektrische Steuereinheit |
| EP06008825A EP1717431B1 (en) | 2005-04-27 | 2006-04-27 | Electric control unit |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005130416A JP4345708B2 (ja) | 2005-04-27 | 2005-04-27 | 車両用電子制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006307721A JP2006307721A (ja) | 2006-11-09 |
| JP4345708B2 true JP4345708B2 (ja) | 2009-10-14 |
Family
ID=36809135
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005130416A Expired - Fee Related JP4345708B2 (ja) | 2005-04-27 | 2005-04-27 | 車両用電子制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7155326B2 (ja) |
| EP (1) | EP1717431B1 (ja) |
| JP (1) | JP4345708B2 (ja) |
| DE (1) | DE602006012752D1 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4266357B2 (ja) * | 2004-03-29 | 2009-05-20 | 三菱電機株式会社 | 車載電子制御装置 |
| JP4572751B2 (ja) * | 2005-06-17 | 2010-11-04 | 株式会社デンソー | 電子制御装置 |
| WO2007098152A2 (en) * | 2006-02-20 | 2007-08-30 | Lee Kang N | Article including enviromental barrier coating system |
| JP4211848B2 (ja) * | 2007-01-24 | 2009-01-21 | 株式会社デンソー | 電子制御装置 |
| US7894954B2 (en) * | 2007-06-04 | 2011-02-22 | King Young Technology Co., Ltd. | Power control system for car computer |
| JP4983487B2 (ja) * | 2007-09-04 | 2012-07-25 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP4525762B2 (ja) * | 2008-02-04 | 2010-08-18 | 株式会社デンソー | 車両用電子制御装置 |
| JP2010176541A (ja) * | 2009-01-30 | 2010-08-12 | Hitachi Automotive Systems Ltd | 車両用電子制御装置 |
| CN102454496B (zh) * | 2010-10-28 | 2016-01-13 | 上海航天汽车机电股份有限公司 | 一种用于氧传感器的通用接口电路 |
| KR101394815B1 (ko) * | 2012-12-24 | 2014-05-13 | 주식회사 유라코퍼레이션 | 통합형 제어기의 전원 보상용 회로 장치 |
| JP6642073B2 (ja) * | 2016-02-10 | 2020-02-05 | 三菱自動車工業株式会社 | 電動車両の電力供給系統の故障診断方法 |
| CN109217643B (zh) * | 2017-06-30 | 2020-09-15 | 三垦电气株式会社 | 电力转换装置以及控制电路 |
| JP6645523B2 (ja) * | 2017-06-30 | 2020-02-14 | サンケン電気株式会社 | 電力変換装置及び制御回路 |
| WO2019054067A1 (ja) * | 2017-09-15 | 2019-03-21 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| WO2020195192A1 (ja) * | 2019-03-26 | 2020-10-01 | 日立オートモティブシステムズ株式会社 | 電子制御装置、電子制御装置の診断方法 |
| JP7359118B2 (ja) * | 2020-09-24 | 2023-10-11 | 株式会社デンソー | 電子制御装置 |
| EP4227518A4 (en) * | 2020-10-12 | 2024-10-30 | Hitachi Astemo, Ltd. | ELECTRONIC CONTROL DEVICE AND METHOD FOR REDUCING POWER CONSUMPTION FOR ELECTRONIC CONTROL DEVICE |
| JP7804560B2 (ja) * | 2022-11-04 | 2026-01-22 | Astemo株式会社 | 車両用電子制御システム及び車両用電子制御システムの制御方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE60016990T2 (de) * | 1999-02-26 | 2005-12-29 | Walbro Corp., Cass City | Fahrzeugbrennstoffsystem |
| US6606502B1 (en) * | 1999-07-27 | 2003-08-12 | Telefonaktiebolaget Lm Ericsson (Publ) | Method system and mobile switching center (MSC) for reporting capability to perform periodic broadcast short message service (SMS) |
| JP3678088B2 (ja) * | 1999-11-26 | 2005-08-03 | 日産自動車株式会社 | 蒸発燃料処理装置 |
| US6531872B1 (en) * | 2000-09-29 | 2003-03-11 | General Motors Corporation | Ignition-off timer diagnostic |
| JP3870751B2 (ja) | 2001-10-30 | 2007-01-24 | 株式会社デンソー | 電子制御装置 |
| JP3861740B2 (ja) | 2002-04-26 | 2006-12-20 | 株式会社デンソー | 電子制御装置 |
| US6877488B2 (en) * | 2002-05-29 | 2005-04-12 | Nartron Corporation | Vehicle fuel management system |
| US6722347B2 (en) * | 2002-07-19 | 2004-04-20 | Delphi Technologies, Inc. | Control routine for a current driver |
| JP2005023843A (ja) * | 2003-07-02 | 2005-01-27 | Toyota Motor Corp | 自動起動タイマ回路の異常診断装置 |
| JP4365647B2 (ja) | 2003-09-05 | 2009-11-18 | 三菱電機株式会社 | 車載電子制御装置の電源回路 |
| JP4033141B2 (ja) | 2004-02-10 | 2008-01-16 | 株式会社デンソー | 車両用電子制御装置 |
| JP2005226494A (ja) | 2004-02-10 | 2005-08-25 | Denso Corp | 電子制御装置 |
| US7475234B2 (en) | 2004-02-10 | 2009-01-06 | Denso Corporation | Electronic control apparatus equipped with malfunction monitor |
| JP4239884B2 (ja) | 2004-04-09 | 2009-03-18 | 株式会社デンソー | ソークタイマ付き電子制御装置 |
-
2005
- 2005-04-27 JP JP2005130416A patent/JP4345708B2/ja not_active Expired - Fee Related
-
2006
- 2006-04-27 DE DE602006012752T patent/DE602006012752D1/de not_active Expired - Lifetime
- 2006-04-27 EP EP06008825A patent/EP1717431B1/en not_active Expired - Lifetime
- 2006-04-27 US US11/412,115 patent/US7155326B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP1717431A3 (en) | 2008-05-21 |
| JP2006307721A (ja) | 2006-11-09 |
| DE602006012752D1 (de) | 2010-04-22 |
| EP1717431A2 (en) | 2006-11-02 |
| US20060247835A1 (en) | 2006-11-02 |
| EP1717431B1 (en) | 2010-03-10 |
| US7155326B2 (en) | 2006-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4345708B2 (ja) | 車両用電子制御装置 | |
| JP4211848B2 (ja) | 電子制御装置 | |
| JP4572751B2 (ja) | 電子制御装置 | |
| JP5176728B2 (ja) | 車両用電子制御装置 | |
| JP4636118B2 (ja) | 電子機器及びプログラム | |
| JP4214815B2 (ja) | 車両用電子制御装置 | |
| JP3870751B2 (ja) | 電子制御装置 | |
| WO2018079537A1 (ja) | 電子制御装置及びそのデータ保護方法 | |
| JP6376006B2 (ja) | 電子制御装置 | |
| JP4876064B2 (ja) | 電子制御装置 | |
| JP4001088B2 (ja) | 電子制御装置 | |
| JP5223630B2 (ja) | 電子制御装置 | |
| JP3870974B2 (ja) | 電子制御装置 | |
| WO2008099276A1 (en) | Vehicle control device | |
| JP2018134964A (ja) | 自動車用電子制御装置 | |
| JP2010176541A (ja) | 車両用電子制御装置 | |
| JP3211708B2 (ja) | 車両制御装置 | |
| JPH04292545A (ja) | 自動車用電子制御装置 | |
| JP2000257502A (ja) | 自動車用電子制御装置 | |
| JP2008019829A (ja) | 車両のエンジン制御装置 | |
| JPH10252547A (ja) | 車両制御装置 | |
| JP2009282566A (ja) | 電子制御装置 | |
| JP2004092417A (ja) | 車両異常検出装置 | |
| JP2002195094A (ja) | 車載エンジンの電子制御装置 | |
| JP2021117112A (ja) | 電子制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070706 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090422 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090512 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090528 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090623 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090706 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120724 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120724 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130724 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |