以下、添付図面を参照して、本発明に係る記録再生装置の最良の形態について説明する。
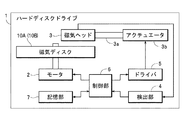
図1に示すハードディスクドライブ1は、記録再生装置の一例であって、モータ2、磁気ヘッド3、検出部4、ドライバ5、制御部6、記憶部7および磁気ディスク10A(10B)を備えて各種データの記録再生が可能に構成されている。モータ2は、制御部6の制御に従って磁気ディスク10A(10B)を一例として4200rpmの回転数で定速回転させる。磁気ヘッド3は、スイングアーム3aを介してアクチュエータ3bに取り付けられて磁気ディスク10A(10B)に対する記録データの記録再生時においてアクチュエータ3bによって磁気ディスク10A(10B)上を移動させられる。また、磁気ヘッド3は、磁気ディスク10Aのサーボパターン領域Asa(図4参照)、または、磁気ディスク10Bのサーボパターン領域Asb(図16参照)からのサーボデータの読み出しと、データ記録領域At(図4,16参照)に対する記録データの磁気的な書き込みと、データ記録領域Atに磁気的に書き込まれている記録データの読み出しとを実行する。なお、磁気ヘッド3は、実際には磁気ディスク10A(10B)に対して磁気ヘッド3を浮上させるためのスライダの底面(エアベアリング面)に再生用素子Ra(図5参照)または再生用素子Rb(図17参照)や、記録用素子(図示せず)が形成されて構成されているが、スライダおよび記録用素子等についての説明および図示を省略する。この場合、上記の再生用素子Ra(Rb)における磁気ディスク10A(10B)との対向面における幅方向(磁気ディスク10A(10B)における半径方向に対応する向き)の幅Wrについては、後述する所定の条件を満たすように規定されている。また、アクチュエータ3bは、制御部6の制御下でドライバ5から供給される駆動電流によってスイングアーム3aをスイングさせることにより、磁気ヘッド3を磁気ディスク10A(10B)上の任意の記録再生位置(任意のトラック)に移動させる。
検出部4は、磁気ヘッド3から出力された出力信号からサーボデータを取得(検出)して制御部6に出力する。ドライバ5は、制御部6から出力された制御信号に従ってアクチュエータ3bを制御して磁気ヘッド3を所望のトラックにオントラックさせる。制御部6は、ハードディスクドライブ1を総括的に制御する。また、制御部6は、本発明における制御部の一例であって、検出部4から出力されたサーボデータ(「磁気ヘッドを介して読み取られた制御信号」の一例)のうちのバースト信号に基づいてドライバ5を制御する(トラッキングサーボ制御処理の実行)。記憶部7は、制御部6の動作プログラムなどを記憶する。
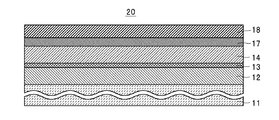
一方、磁気ディスク10Aは、磁気記録媒体の一例であって、前述したモータ2や磁気ヘッド3などと共にハードディスクドライブ1の筐体内に配設されている。この磁気ディスク10Aは、垂直記録方式による記録データの記録が可能なディスクリートトラック型の磁気ディスク(パターンド媒体)であって、図2に示すように、軟磁性層12、中間層13および磁性層14がガラス基材11の上にこの順で形成されている。この場合、磁性層14は、突端部(磁気ディスク10Aの表面側:同図における上端部)から基端部(同図における下端部)までの全体が磁性材料で形成された凸部40a,40a・・と、凸部40a,40a・・間の凹部40b,40b・・とが形成されて凹凸パターン40を構成する。また、凹部40b,40b・・には、SiO2等の非磁性材料15が埋め込まれて磁気ディスク10Aの表面が平坦化されている。なお、この磁気ディスク10Aでは、凸部40aの形成領域が記録領域に相当し、凹部40bの形成領域(非磁性材料15が埋め込まれた領域)が非記録領域に相当する。さらに、凹部40b,40b・・に埋め込まれた非磁性材料15、および磁性層14(凸部40a)の表面には、ダイヤモンドライクカーボン(DLC)等によって厚みが2nm程度の保護層16(DLC膜)が形成されている。また、保護層16の表面には、磁気ヘッド3および磁気ディスク10Aの双方の傷付きを回避するための潤滑剤(一例として、フォンブリン系の潤滑剤)が塗布されている。
ガラス基材11は、直径2.5インチのガラス板を表面研磨して厚みが0.6mm程度の円板状に形成されている。なお、磁気ディスク10Aに用いる基材は、上記のガラス基材に限定されず、アルミニウムやセラミックなどの各種非磁性材料で円板状に形成した基材を用いることができる。軟磁性層12は、CoZrNb合金などの軟磁性材料をスパッタリングすることによって厚みが100nm〜200nm程度の薄膜状に形成されている。中間層13は、磁性層14を形成するための下地層として機能する層であって、CrやCoCr非磁性合金などの中間層形成用材料をスパッタリングすることによって厚みが40nm程度の薄膜状に形成されている。磁性層14は、凹凸パターン40(図4に示すデータトラックパターン40tおよびサーボパターン40sa)を構成する層であって、例えばCoCrPt合金をスパッタリングした層に対してエッチング処理することによって凹部40b,40b・・が形成されている。
この場合、図3に示すように、この磁気ディスク10Aでは、データ記録領域At,At・・の間にサーボパターン領域Asa,Asa・・が設けられてデータ記録領域Atおよびサーボパターン領域Asaが磁気ディスク10Aの回転方向(矢印Rの向き)において交互に並ぶように規定されている。また、この磁気ディスク10Aを搭載したハードディスクドライブ1では、前述したようにモータ2が制御部6の制御に従って磁気ディスク10Aを角速度一定で回転させるように構成されている。したがって、この磁気ディスク10Aでは、単位時間当たりに磁気ヘッド3の下方を通過させられる磁気ディスク10A上の長さに比例して、磁気ディスク10Aの回転方向に沿ったデータ記録領域Atの長さ、および回転方向に沿ったサーボパターン領域Asaの長さが中心Oから離間するほど長くなるように(データ記録領域Atおよびサーボパターン領域Asaが内周側領域よりも外周側領域ほど幅広となるように)規定されている。この結果、データ記録領域At内に形成されたデータ記録トラック(凸部40a)の回転方向に沿った長さや、サーボパターン領域Asa内に形成されたサーボパターン40sa用の各凸部40a,40a・・および各凹部40b,40b・・における回転方向に沿った基準の長さ(例えば、1ビット信号長に対応する長さ)は、磁気ディスク10Aの内周側領域よりも外周側領域ほど長くなっている。
また、図4に示すように、データ記録領域Atには、データトラックパターン40tが形成されている。なお、同図および後に参照する図5,16,17において、斜線で塗り潰した領域は、凹凸パターン40における凸部40aの形成領域(記録領域)を表し、白色の領域は、凹凸パターン40における凹部40bの形成領域(非記録領域)を表している。この場合、図5に示すように、データトラックパターン40tは、中心O(図3参照)を中心とする同心円状、または、螺旋状の多数の凸部40a,40a・・(データ記録トラック)と、各凸部40a,40a・・の間の凹部40b,40b・・(トラック間凹部)とで構成されている。なお、磁気ディスク10Aの回転中心とデータトラックパターン40tの中心O(トラックパターン中心)とが一致しているのが好ましいが、実際には、磁気ディスク10Aの回転中心とデータトラックパターン40tの中心Oとの間に製造誤差に起因する30〜50μm程度の極く小さなずれが生じることがある。しかし、この程度のずれ量であれば磁気ヘッド3に対するトラッキングサーボ制御が十分に可能で、回転中心と中心Oとは、実質的には同様であるといえる。また、この磁気ディスク10Aのデータ記録領域Atでは、一例として、凸部40a(データ記録トラック)における磁気ディスク10Aの半径方向に沿った長さと、凹部40bにおける磁気ディスク10Aの半径方向に沿った長さとが互いに等しい長さ(長さ比が1:1)となっている。さらに、この磁気ディスク10Aでは、データ記録領域Atに形成された凸部40aの半径方向に沿った長さ、および凹部40bの半径方向に沿った長さが、磁気ディスク10Aの内周側領域から外周側領域までほぼ同一の長さに規定されている。
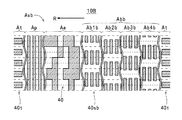
一方、図4に示すように、サーボパターン領域Asaには、プリアンブルパターン領域Apに凹凸パターン40によって形成されたプリアンブルパターンと、アドレスパターン領域Aaに凹凸パターン40によって形成されたアドレスパターンと、バーストパターン領域Abaに凹凸パターン40によって形成されたバーストパターンとを有するサーボパターン40saが形成されている。また、バーストパターン領域Abaは、第1バースト領域Ab1a〜第4バースト領域Ab4aの4つのバースト領域を備えている。この場合、バーストパターン領域Abaにおける第1バースト領域Ab1a〜第4バースト領域Ab4aには、磁気ヘッド3を所望のトラックにオントラックさせるための位置検出用のパターンが凹凸パターン40によって形成されている。具体的には、図5に示すように、磁気ディスク10Aの回転方向(矢印Rの向き)に沿って複数の凹部40b,40b・・(非記録領域)が形成されることにより、凸部40a(記録領域)および凹部40bが回転方向に沿って交互に並ぶ領域と、凸部40aが回転方向において連続する領域とが形成されている。
また、図5に示すように、バーストパターン領域Abaには、2組のバーストパターンBP1a,BP2aが形成されている(「M=2」)。具体的には、第1バースト領域Ab1aに形成された凹凸パターン40と、第2バースト領域Ab2aに形成された凹凸パターン40とによってバーストパターンBP1aが構成されると共に、第3バースト領域Ab3aに形成された凹凸パターン40と、第4バースト領域Ab4aに形成された凹凸パターン40とによってバーストパターンBP2aが構成されている。また、バーストパターン領域Abaに形成された各凹部40b,40b・・は、それぞれバースト信号単位部に相当し、磁気ディスク10Aの半径方向(同図における左右方向)に沿った長さL11(「BW」)が互いに等しくなるように形成されている。なお、同図では、理解を容易とするために、第1バースト領域Ab1a〜第4バースト領域Ab4aの各バースト領域毎に、回転方向に沿って3つの凹部40bを並べて図示しているが、実際には、各バースト領域毎に、10〜30個の凹部40b,40b・・が回転方向に沿って並んで形成されている。また、各バースト領域中に形成するパターンについては、回転方向に沿って複数のバースト信号単位部を並べたパターンに限定されず、各バースト領域毎に回転方向に沿って単一のバースト信号単位部(凹部40b)を形成してバーストパターンを構成することもできる。
この場合、この磁気ディスク10Aでは、第1バースト領域Ab1aおよび第2バースト領域Ab2a内に半径方向に沿って複数のバーストパターンBP1a,BP1a・・が形成されると共に、第3バースト領域Ab3aおよび第4バースト領域Ab4a内に半径方向に沿って複数のバーストパターンBP2a,BP2a・・が形成されている。また、各バースト領域Ab1a〜Ab4a内に回転方向に沿って並ぶ凹部40b,40b・・の列は、それぞれ2つのバーストパターンBP1a,BP1a(またはバーストパターンBP2a、BP2a)を構成する。具体的には、図5に示すように、例えば、第1バースト領域Ab1a内において回転方向に沿って並ぶ凹部40b,40b・・の列は、その凹部40b,40b・・の列に対して第2バースト領域Ab2a内において半径方向の内周側に位置する凹部40b,40b・・の列と相俟って1つのバーストパターンBP1aを構成すると共に、その凹部40b,40b・・の列に対して第2バースト領域Ab2a内において半径方向の外周側に位置する凹部40b,40b・・の列と相俟って他の1つのバーストパターンBP1aを構成する。
また、図5に示すように、この磁気ディスク10Aでは、中心Oからバースト信号単位部(凹部40b)までの距離(一例として、中心Oとバースト信号単位部の半径方向における中心との間の距離)が第1バースト領域Ab1a〜第4バースト領域Ab4aの各バースト領域毎に互いに相違するように凹凸パターン40がバーストパターン領域Abaに形成されてバーストパターンBP1a,BP2aが形成されている。さらに、この磁気ディスク10Aでは、第1バースト領域Ab1a〜第4バースト領域Ab4aの各バースト領域内における凹部40b,40b・・の半径方向に沿った形成ピッチ(各バースト領域内における凹部40b,40b・・の半径方向における各中心の間の距離と等しい長さ:同図に示す長さL12)が互いに等しくなるように凹凸パターン40がバーストパターン領域Abaに形成されている。この場合、この磁気ディスク10Aでは、上記の長さL12がトラックピッチTpに対する2倍の長さ(「(2・M/N)・トラックピッチ」において「N=2」)となっている。
また、この磁気ディスク10Aでは、半径方向に沿った長さL10がトラックピッチTpに(2・M/N)を乗じた長さ(「(2・M/N)・トラックピッチ」:この例では、トラックピッチTpの2倍の長さ)であってその半径方向側における両端(一点鎖線で示す部位)が各バーストパターンBP1a,BP2a・・の半径方向における中心C1a,C2a・・とは一致しない範囲内(所定範囲内)において、各バーストパターンBP1a,BP2a・・の半径方向における中心C1a,C2a・・が、トラックピッチTpに対する1/2の長さ(「(1/N)・トラックピッチ」)間隔で4個(「(2・M)個」)だけ存在するように第1バースト領域Ab1a〜第4バースト領域Ab4a内に凹部40b,40b・・が形成されている。この場合、この磁気ディスク10Aでは、バーストパターンBP1aの半径方向における中心C1aがデータ記録トラック(データ記録領域Atに形成された凸部40a)の半径方向における中心(トラック中心)と一致すると共に(バーストパターンBP1aの中心C1aとデータ記録トラックの中心との距離が「0」)、バーストパターンBP2aの半径方向における中心C2aとデータ記録トラックの半径方向における中心との間の距離(長さL15)がトラックピッチTpに対する1/2の長さとなるように凹凸パターン40がバーストパターン領域Abaに形成されている。
また、バーストパターンBP1a,BP1a・・は、第1バースト領域Ab1aに形成された凹部40bと、第2バースト領域Ab2aに形成された凹部40bとが回転方向において凸部40aを介して互いに離間するように形成されている(一方のバースト信号単位部と他方のバースト信号単位部とが回転方向において重ならないように形成された一例)。さらに、バーストパターンBP1a,BP1a・・は、第1バースト領域Ab1aに形成された凹部40bの半径方向における中心と、第2バースト領域Ab2aに形成された凹部40bの半径方向における中心とがトラックピッチTp(「(M/N)・トラックピッチ」)と等しい長さL13だけ半径方向において離間している。また、バーストパターンBP1a,BP1a・・は、第1バースト領域Ab1aに形成された凹部40bおよび第2バースト領域Ab2aに形成された凹部40bのそれぞれの半径方向側における両端部のうちの対向する端部同士がトラックピッチTp(「(M/N)・トラックピッチ」)よりも狭い長さL14だけ半径方向において凸部40aを介して離間している。この場合、磁気記録媒体における内周側領域から外周側領域までの全域において第1バースト領域Ab1aの凹部40bと第2バースト領域Ab2aの凹部40bとが半径方向において長さL14だけ離間している必要はなく、任意の領域のみ両凹部40b,40bを半径方向において離間させる構成を採用することができる。また、上記の長さL14を内周側領域から外周側領域まで同一の長さに規定せずに、内周側領域から外周側領域までの各領域毎に任意に異ならせることもできる。この場合、長さL14が長いほどPESに基づく検出可能帯域が拡がるため、例えば、磁気ディスク10Aにおける内周側において検出可能帯域が狭いことに起因して正確なトラッキングサーボ制御が困難となるおそれがある場合には、磁気ディスク10Aにおける外周側から内周側に向けて長さL14を徐々に長くする構成を採用することができる。
また、バーストパターンBP2a,BP2a・・は、第3バースト領域Ab3aに形成された凹部40bと、第4バースト領域Ab4aに形成された凹部40bとが回転方向において凸部40aを介して互いに離間するように形成されている(一方のバースト信号単位部と他方のバースト信号単位部とが回転方向において重ならないように形成された一例)。さらに、バーストパターンBP2a,BP2a・・は、第3バースト領域Ab3aに形成された凹部40bの半径方向における中心と、第4バースト領域Ab4aに形成された凹部40bの半径方向における中心とがトラックピッチTp(「(M/N)・トラックピッチ」)と等しい長さL13だけ半径方向において離間している。また、バーストパターンBP2a,BP2a・・は、第3バースト領域Ab3aに形成された凹部40bおよび第4バースト領域Ab4aに形成された凹部40bのそれぞれの半径方向側における両端部のうちの対向する端部同士がトラックピッチTp(「(M/N)・トラックピッチ」)よりも狭い長さL14だけ半径方向において凸部40aを介して離間している。
この場合、磁気記録媒体における内周側領域から外周側領域までの全域において第3バースト領域Ab3aの凹部40bと第4バースト領域Ab4aの凹部40bとが半径方向において長さL14だけ離間している必要はなく、任意の領域のみ両凹部40b,40bを半径方向において離間させる構成を採用することができる。また、上記の長さL14を内周側領域から外周側領域まで同一の長さに規定せずに、内周側領域から外周側領域までの各領域毎に任意に異ならせることもできる。この場合、長さL14が長いほどPESに基づく検出可能帯域が拡がるため、例えば、磁気ディスク10Aにおける内周側において検出可能帯域が狭いことに起因して正確なトラッキングサーボ制御が困難となるおそれがある場合には、磁気ディスク10Aにおける外周側から内周側に向けて長さL14を徐々に長くする構成を採用することができる。なお、前述したアクチュエータ3b(一例として、VCM(Voice Coil Motor))は、記録データの正確な記録再生を実行するために、一般的には、そのトラッキング精度(機械精度)がトラックピッチTpの5%以下となるように設計されている。言い換えれば、アクチュエータ3bによって駆動される磁気ヘッド3は、記録データの記録再生時にトラックピッチTpの5%程度を上限とする所定の範囲内で磁気ディスク10Aの半径方向で常に微動している。したがって、PESに基づく磁気ヘッド3の位置検出についての検出可能帯域を確実に拡げるためには、上記のバーストパターンBP1a,BP2aにおける長さL14(バーストパターンを構成する2種類のバースト信号単位部の半径方向における離間量)をトラックピッチTpの5%以上の長さとするのが好ましい。
また、この磁気ディスク10Aでは、「M」および「N」の双方が上記のように「2」となるように形成されている。したがって、条件式「(M+1)・Tp/N−BW≦Wr≦(M−1)・Tp/N+BW」に「M=2」および「N=2」を当て嵌めると、磁気ヘッド3における再生用素子Raの幅Wrが、「トラックピッチTpに対する3/2の長さ−長さL11」である幅Wr1a(図5参照)以上であって、「トラックピッチTpに対する1/2の長さ+長さL11」である幅Wr2a(図5参照)以下の範囲内である限り、磁気ディスク10Aが上記の条件式を満たすこととなる。以下、本明細書では、一例として、磁気ヘッド3における再生用素子Raの幅Wrが「トラックピッチTpに対する3/2の長さ−長さL11」であるものとして説明する。なお、この磁気ディスク10Aを用いる際の磁気ヘッド3における再生用素子Raの幅(最小の幅Wr1aおよび最大の幅Wr2a)については、後に詳細に説明する。
次に、磁気ディスク10Aの製造方法について説明する。
上記の磁気ディスク10Aの製造に際しては、図6に示す中間体20と図7に示すスタンパー30とを使用する。この場合、図6に示すように、中間体20は、軟磁性層12、中間層13、および磁性層14がガラス基材11の上にこの順で形成されると共に、磁性層14の上にマスク層17と、厚み80nm程度の樹脂層(レジスト層)18とが形成されて構成されている。一方、スタンパー30は、磁気記録媒体製造用のスタンパーの一例であって、図7に示すように、磁気ディスク10Aにおける凹凸パターン40(データトラックパターン40tおよびサーボパターン40sa)を形成するための凹凸パターン41を形成可能な凹凸パターン39が形成されて、インプリント法による磁気ディスク10Aの製造が可能に構成されている。この場合、スタンパー30の凹凸パターン39は、凸部39a,39a・・が磁気ディスク10Aの凹凸パターン40における凹部40b,40b・・(非記録領域)に対応し、凹部39b,39b・・が凹凸パターン40における凸部40a,40a・・(記録領域)に対応して形成されている。なお、スタンパー30については公知の各種製造方法によって製造することができるため、このスタンパー30の製造方法についての詳細な説明を省略する。
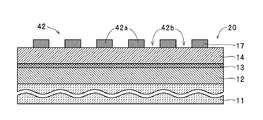
最初に、図8に示すように、中間体20の樹脂層18にスタンパー30の凹凸パターン39をインプリント法によって転写する。具体的には、スタンパー30における凹凸パターン39の形成面を中間体20の樹脂層18に押し付けることにより、凹凸パターン39の凸部39a,39a・・を中間体20の樹脂層18に押し込む。この際には、凸部39a,39a・・が押し込まれた部位のレジスト(樹脂層18)が凹凸パターン39における凹部39b,39b・・内に向けて移動する。次いで、中間体20からスタンパー30を剥離し、さらに、底面に残存する樹脂(図示せず)を酸素プラズマ処理によって除去することにより、図9に示すように、中間体20におけるマスク層17の上に樹脂層18からなる凹凸パターン41が形成される。この場合、凹凸パターン41における凸部41a,41a・・の高さ(凹部41b,41b・・)の深さは、130nm程度となる。
続いて、上記の凹凸パターン41(樹脂層18)をマスクとしてを用いてエッチング処理を実行することにより、凹凸パターン41における凹部41b,41b・・の底部においてマスク(凸部41a,41a・・)から露出しているマスク層17をエッチングして、図10に示すように、凸部42aおよび凹部42bを有する凹凸パターン42を中間体20のマスク層17に形成する。次いで、凹凸パターン42(マスク層17)をマスクとして用いてエッチング処理を実行することにより、凹凸パターン42における凹部42b,42b・・の底部においてマスク(凸部42a,42a・・)から露出している磁性層14をエッチングして、図11に示すように、凸部40aおよび凹部40bを有する凹凸パターン40を中間体20の磁性層14に形成する。続いて、凸部40a,40a・・の上に残存しているマスク層17に対して選択的にエッチング処理を行うことにより、残存しているマスク層17を完全に除去して凸部40a,40a・・の突端面を露出させる。これにより、データトラックパターン40tおよびサーボパターン40sa(凹凸パターン40)が中間層13の上に形成される。
続いて、図12に示すように、非磁性材料15としてのSiO2をスパッタリングする。この際には、非磁性材料15によって凹部40b,40b・・が完全に埋め尽くされ、かつ、凸部40a,40a・・の上に例えば厚みが60nm程度の非磁性材料15の層が形成されるように、非磁性材料15を十分にスパッタリングする。続いて、磁性層14の上(凸部40a,40a・・の上および凹部40b,40b・・の上)の非磁性材料15の層に対してイオンビームエッチング処理を実行する。この際には、凸部40aの突端面が非磁性材料15から露出するまでイオンビームエッチング処理を継続する。これにより、非磁性材料15の層に対するイオンビームエッチング処理が完了して、図13に示すように、中間体20の表面が平坦化される。続いて、中間体20の表面を覆うようにしてCVD法によってダイヤモンドライクカーボン(DLC)の薄膜を成膜することによって保護層16形成した後に、保護層16の表面にフォンブリン系の潤滑剤を平均厚さが例えば2nm程度となるように塗布する。これにより、図2に示すように、磁気ディスク10Aが完成する。
この磁気ディスク10Aでは、図14に示すように、例えば、第1バースト領域Ab1aに形成されている凹部40bにおける半径方向側の端部と、第2バースト領域Ab2aに形成されている凹部40bにおける半径方向側の端部とが、トラック中心(データ記録トラックの半径方向における中心)を挟んで半径方向において互いに重ならない状態で離間するようにバーストパターンBP1aが形成されている。したがって、この磁気ディスク10Aでは、両バースト領域Ab1a,Ab2aに形成されている凹部40b(バースト信号単位部)における半径方向に沿った長さL11がトラックピッチTpよりも短くなっている。この結果、磁気ディスク10Aに対する磁気ヘッド3の位置が変化して、磁気ヘッド3(再生用素子Ra)が例えば位置P1から矢印Aの向きで位置P2まで磁気ディスク10Aに対して移動したときには、第1バースト領域Ab1aにおける磁気ヘッド3からの出力信号の出力レベルが実線Aaで示す状態となる。また、磁気ヘッド3が例えば位置P3から矢印Bの向きで位置P4まで磁気ディスク10Aに対して移動したときには、第2バースト領域Ab2aにおける磁気ヘッド3からの出力信号の出力レベルが実線Baで示す状態となる。この場合、実線Aaで示す出力信号をS1とし、実線Baで示す出力信号をS2としたときに、バーストパターンBP1aによって得られるPESは、「(S1−S2)/(S1+S2)」となる。したがって、バーストパターンBP1aによって得られるPESは、同図に実線で示す特性となる。
一方、従来の磁気ディスク10x1では、前述したように、サーボパターンPs1,Ps2における半径方向側の両端部がトラック中心において一致する、つまり、両端部がトラック中心に位置するようにバーストパターンが形成されている。したがって、従来の磁気ディスク10x1では、サーボパターンPs1,Ps2(バースト信号単位部)における半径方向に沿った幅TsがトラックピッチTpと等しくなっている。この結果、従来の磁気ディスク10x1に対する磁気ヘッドの位置が変化して、磁気ヘッド(再生用素子Rx)が例えば位置P1から矢印Aの向きで位置P2まで磁気ディスク10x1に対して移動したときには、磁気ヘッドからの出力信号の出力レベルが一点鎖線Axで示す状態となる。また、磁気ヘッドが例えば位置P3から矢印Bの向きで位置P4まで磁気ディスク10x1に対して移動したときには、磁気ヘッドからの出力信号の出力レベルが一点鎖線Bxで示す状態となる。この結果、従来の磁気ディスク10x1におけるサーボパターンPs1,Ps2によって得られるPESは、同図に一点鎖線で示す特性となる。
この場合、磁気ヘッド3が位置P0(この例では、トラック中心)に位置している状態から矢印Cの向きに移動したときに、従来の磁気ディスク10x1では、磁気ヘッドの位置をPESに基づいて検出可能な範囲が位置P0から位置Pxcまでの範囲となっている。これに対して、磁気ディスク10Aでは、制御部6がPESに基づいて位置P0から位置Pacまでの広い範囲内において磁気ヘッド3の位置を検出することが可能となっている。また、磁気ヘッド3が位置P0から矢印Dの向きに移動したときに、従来の磁気ディスク10x1では、磁気ヘッドの位置をPESに基づいて検出可能な範囲が位置P0から位置Pxdまでの範囲となっている。これに対して、磁気ディスク10Aでは、制御部6がPESに基づいて位置P0から位置Padまでの広い範囲内において磁気ヘッド3の位置を検出することが可能となっている。したがって、磁気ディスク10Aでは、磁気ヘッド3がトラック中心から大きく位置ずれした状態であってもPESに基づいてその位置を検出して所望のトラックにオントラックさせることが可能となっている。
また、この磁気ディスク10Aでは、前述したように、磁気ヘッド3の幅Wrと、データトラックパターン40tにおける凸部40aの半径方向に沿った形成ピッチ(トラックピッチTp)と、第1バースト領域Ab1a〜第4バースト領域Ab4aに形成された凹部40bの半径方向に沿った長さL11(「BW」)とが、「(M+1)・Tp/N−BW≦Wr≦(M−1)・Tp/N+BW」の条件式を満たす関係となるようにデータトラックパターン40tおよびサーボパターン40saが形成されている。したがって、この磁気ディスク10Aでは、データトラックパターン40tおよびサーボパターン40saにおける各部の長さによって再生用素子Raの幅Wrが一義的に規定されることなく、再生用素子Raの幅Wrを比較的自由に規定することが可能となっている。言い換えれば、従来の磁気ディスク10x1とは異なり、磁気ヘッド3における再生用素子Raの幅Wrによって一義的に規定されることなく、データトラックパターン40tおよびサーボパターン40saにおける各部の長さを規定することが可能となっている。
具体的には、図15に示すように、この磁気ディスク10Aでは、第1バースト領域Ab1aに形成された凹部40bの半径方向に沿った形成ピッチである長さL12が、トラックピッチTpの2倍の長さ(「(M/N)・Tp・2」)となっている。この場合、上記の長さL12は、前述した長さL10(所定範囲の半径方向に沿った長さ)と等しい長さとなっている。このため、この磁気ディスク10Aでは、バーストパターンBP1a,BP2a・・の半径方向における中心C1a,C2a・・が長さL12の範囲内にトラックピッチTpに対する1/2の長さ間隔で(「(1/N)・トラックピッチ」の間隔で)4個(「(2・M)個」)だけ存在することとなる。具体的には、第1バースト領域Ab1a〜第4バースト領域Ab4a内の各凹部40b,40b・・(バースト信号単位部)は、その半径方向の両端側にバーストパターンBP1a,BP2a・・の中心C1a,C2a・・が存在するように形成されている。したがって、例えば第1バースト領域Ab1aにおいては、凹部40bの半径方向に沿った形成ピッチである上記の長さL12の範囲内に2つのバーストパターンBP1a,BP1aの半径方向における中心C1a,C1aが存在する。また、長さL12の範囲内には、2組(M組)のバーストパターンBP1a,BP2aの半径方向における中心C1a,C2a、すなわち、4個(「(2・M)個」)の中心C1a,C2a・・が存在する。
したがって、この磁気ディスク10Aでは、例えば1つのバーストパターンBP1aによって得られるPESに基づいて磁気ヘッド3をトラッキングサーボ制御すべき範囲の半径方向に沿った長さL16が、上記の長さL12に対する1/4の長さ(「1/(2・M)」)となる。この場合、この長さL16は、トラックピッチTpに対する1/2の長さ(「(M/N)・Tp・2/(2・M)=(1/N)・Tp」)であり、この磁気ディスク10Aでは、トラックピッチTpに対する1/2の長さがデータ記録トラックの幅、およびトラック間凹部の幅と等しい長さL16となっている。つまり、この磁気ディスク10Aでは、バーストパターンBP1aによって得られるPESに基づいて磁気ヘッド3をトラッキングサーボ制御すべき範囲がデータ記録トラックの幅およびトラック間凹部の幅と等しい長さL16の範囲内となる。また、第1バースト領域Ab1aに形成された凹部40bの端部と、第2バースト領域Ab2aに形成された凹部40bの端部との半径方向に沿った距離である長さL14は、長さL12に対する1/2の長さから長さL11を差し引いた長さ(「(M/N)・Tp−BW」)であり、これは、トラックピッチTpから長さL11を差し引いた長さと等しくなる。
この場合、トラッキングサーボ制御すべき範囲(長さL16)の一方の端部である位置P5に再生用素子Raが位置している状態(再生用素子Raにおける幅方向の中心が位置P5に重なる状態)において、再生用素子Raの幅Wrが同図に示す幅Wr1aよりも狭いときには、再生用素子Raの端部と、第1バースト領域Ab1aに形成された凹部40bの端部との間に半径方向(トラッキングサーボ制御方向)において隙間が生じる。この隙間がすなわち不感帯となるため、再生用素子Raの幅Wrは、同図に示す幅Wr1a以上である必要がある。この幅Wr1aは、同図に示すように、長さL14aと長さL16aとの和に対する2倍の長さとなっている。この場合、長さL14aは、上記の長さL14に対する1/2の長さで、長さL16aは、上記の長さL16に対する1/2の長さ(「Tp/(2・N)」)となっている。つまり、幅Wr1aに対する1/2の長さは、トラックピッチTpから長さL11を差し引いた長さ(上記の長さL14)に対する1/2の長さ(長さL14a:「(M/N)・Tp/2−BW/2」)と、トラックピッチTpに対する1/2の長さ(上記の長さL16)に対する1/2の長さ(長さL16a:「Tp/(2・N)」)との和、すなわち、トラックピッチTpに対する3/4の長さから長さL11に対する1/2の長さを差し引いた長さとなる。したがって、幅Wr1aは、トラックピッチTpに対する3/2の長さ(「(M+1)・Tp/N」)から長さL11(BW)を差し引いた長さとなり、この長さは、前述した条件式中の「(M+1)・Tp/N−BW」と一致する。
一方、トラッキングサーボ制御すべき範囲(長さL16)の他方の端部である位置P6に再生用素子Raが位置している状態(再生用素子Raにおける幅方向の中心が位置P6に重なる状態)において、再生用素子Raの幅Wrが同図に示す幅Wr2aよりも広いときには、再生用素子Raの端部が、第1バースト領域Ab1aに形成された凹部40bの端部から半径方向(トラッキングサーボ制御方向)にはみ出した状態となる。このはみ出し量がすなわち不感帯となるため、再生用素子Raの幅Wrは、同図に示す幅Wr2a以下である必要がある。この幅Wr2aは、上記の長さL11から長さL17を差し引いた長さに対する2倍の長さとなっている。この場合、長さL17は、上記の長さL16aから長さL14aを差し引いた長さ、すなわち、トラックピッチTpに対する1/2の長さである長さL16に対する1/2の長さ(「Tp/(2・N)」)から、トラックピッチTpから長さL11を差し引いた長さに対する1/2の長さ(「(Tp−BW)・(M/N)・(1/2)」)を差し引いた長さとなっている。つまり、幅Wr2aに対する1/2の長さは、上記の長さL11から、トラックピッチTpに対する1/4の長さ(「Tp/(2・N)」)を差し引いた長さと、上記の長さL14aとの和の長さ(「BW−Tp/(2・N)+(M/N)・Tp/2−BW/2」=「(M−1)・Tp/(2・N)+BW/2」)となる。したがって、幅Wr2aは、トラックピッチTpに対する1/2の長さ(「(M−1)・Tp/N」)と、上記の長さL11(BW)と和の長さとなり、この長さは、前述した条件式中の「(M−1)・Tp/N+BW」と一致する。
以上のように、磁気ディスク10Aは、「(M+1)・Tp/N−BW≦Wr≦(M−1)・Tp/N+BW」との条件を満たすようにトラックピッチTpや長さL11が規定されている。したがって、上記のように規定される幅Wr1aから幅Wr2aまでの各種幅Wrの再生用素子Raに対して、磁気ディスク10Aは、不感帯を生じさせることなく
磁気ディスク10A上における磁気ヘッド3(再生用素子Ra)の位置を特定させることが可能となっている。この場合、この磁気ディスク10Aでは、バーストパターンBP1a,BP2a・・の半径方向におけるC1a,C2a・・の半径方向に沿った間隔が(1/2)・トラックピッチTp(「(1/N)・トラックピッチ」においてN=2の例)となるようにバーストパターン領域AbaにバーストパターンBP1a,BP2a・・が形成されている。したがって、サーボパターンPs1,Ps2、または、サーボパターンPs3,Ps4が一対となって機能する各バーストパターンの半径方向における各中心の半径方向に沿った間隔がトラックピッチTpとなるようにバーストパターンが形成された(「N=1」である)従来の磁気ディスク10x1,10x2とは異なり、前述したように、再生用素子Raの幅WrがトラックピッチTpよりも狭い場合であっても不感帯を生じさせることなく磁気ディスク10A上における磁気ヘッド3(再生用素子Ra)の位置を特定させることが可能となっている。このため、必要に応じて幅WrがトラックピッチTpよりも狭い再生用素子Raを用いることで、サイドリード現象の発生を回避することが可能となっている。
この場合、上記の「N」を「自然数ではない値」としたときには、各データ記録トラックのトラック中心と、各バーストパターンによって得られるPESの値が「0」となる位置(各バーストパターンにおける半径方向の各中心の位置)との半径方向における位置関係が各データ記録トラック毎に相違することとなる。この結果、例えば、磁気ヘッド(再生用素子)がトラック中心に位置しているときのPESの値が各データ記録トラック毎に相違することとなり、PESの値に基づいて所望のデータ記録トラックにおけるトラック中心に再生用素子を位置させる処理が煩雑となる。これに対して、上記の「N」を「自然数」とした場合には、各データ記録トラックのトラック中心と、PESの値が「0」となる位置との半径方向における位置関係がすべてのデータ記録トラックにおいて一致する。これにより、例えば、磁気ヘッド(再生用素子)がトラック中心に位置しているときのPESの値がすべてのデータ記録トラックにおいて等しい値となるため、いずれのデータ記録トラックに対しても、PESの値に基づいてそのトラック中心に再生用素子を位置させる処理を容易に実行することが可能となる。また、上記の磁気ディスク10Aのように、各バーストパターンBP1a,BP1a・・の半径方向に沿った中心C1a,C1a・・とトラック中心とを一致させることにより、PESの値が「0」のときに再生用素子Raがトラック中心に位置していると特定することが可能となる。これにより、煩雑な処理を不要としつつ、再生用素子Raを容易にトラック中心に位置させることが可能となっている。
このように、この磁気ディスク10Aおよびハードディスクドライブ1によれば、凹部40b(非記録領域)で構成された2種類のバースト信号単位部を有するバーストパターンBP1a,BP2a・・を回転方向に沿ってM組(この例では2組)形成すると共に、内周側領域から外周側領域までの各領域のうちの少なくとも一部分(この例では、全域)において、第1バースト領域Ab1aおよび第2バースト領域Ab2aに形成された凹部40b,40bの半径方向において対向する両端部が半径方向において凸部40a(記録領域)を介して離間すると共に、第3バースト領域Ab3aおよび第4バースト領域Ab4aに形成された凹部40b,40bの半径方向において対向する両端部が半径方向において凸部40a(記録領域)を介して離間するように各バースト信号単位部を形成したことにより、PESに基づく磁気ヘッド3(再生用素子Ra)の位置検出についての検出可能帯域を十分に拡げることができる結果、バーストパターンBP1a,BP2a・・に対応して磁気ヘッド3から出力される出力信号にノイズ等に起因する変動が生じたとしても、磁気ヘッド3の位置ずれを確実に検出して正確なトラッキングサーボ制御の実行を可能とすることができる。また、1組のバーストパターンしか存在しない(「M=1」である)従来の磁気ディスク10x1とは異なり、磁気ヘッド3における再生用素子Raの幅WrとトラックピッチTpとを一致させる必要がないため、データトラックパターン40tおよびサーボパターン40sbについての設計の自由度を高めることができる。また、2組(「M=2」)のバーストパターンを備えるものの各バーストパターンにおける半径方向の各中心がトラックピッチと等しい間隔で配置されている従来の磁気ディスク10x2とは異なり、再生用素子Raの幅WrをトラックピッチTpよりも広くする必要がないため、サイドリード現象の発生を十分に抑制することができる。
また、この磁気ディスク10Aを搭載したハードディスクドライブ1によれば、「(M+1)・Tp/N−BW≦Wr≦(M−1)・Tp/N+BW」の条件を満たすように磁気ディスク10AのバーストパターンBP1a,BP2aを形成したことにより、上記の条件に当て嵌まる幅Wrの再生用素子Raを有する磁気ヘッド3を使用することでバーストパターンについての不感帯を生じさせることなく、PESに基づく磁気ヘッド3(再生用素子Ra)の位置検出についての検出可能帯域を十分に拡げることができ、正確なトラッキングサーボ制御の実行を可能とすることができる。この場合、従来の磁気ディスク10x1とは異なり、再生用素子Raの幅によってトラックピッチTpやバースト信号単位部(凹部40b)の半径方向に沿った長さL11が一義的に規定されることがないため、データトラックパターンおよびサーボパターンについての設計の自由度を高めることができる。これにより、トラック密度の向上や、サイドリード現象の回避等の目的に応じてトラックピッチTpやバースト信号単位部(凹部40b)の半径方向に沿った長さL11を適宜変更することができる。また、従来の磁気ディスク10x2とは異なり、再生用素子Raの幅WrをトラックピッチTpよりも広くする必要がないため、サイドリード現象の発生を十分に抑制することができる。これにより、高密度記録が可能で、しかも、再生エラーが生じ難い磁気ディスク10Aを搭載したハードディスクドライブ1を提供することができる。
さらに、上記のスタンパー30によれば、磁気ディスク10Aの凹凸パターン40の凹部40b,40b・・(非記録領域)に対応して形成された凸部39a,39a・・と、磁気ディスク10Aにおける凹凸パターン40の凸部40a,40a・・(記録領域)に対応して形成された凹部39b,39b・・とを有する凹凸パターン39を備えたことにより、PESに基づく磁気ヘッド3の位置検出についての検出可能帯域が十分に拡いバーストパターンBP1a,BP2a・・を有する磁気ディスク10Aをインプリント法等によって容易に製造することができる。
次に、磁気記録媒体の他の一例である磁気ディスク10Bをハードディスクドライブ1に搭載した例について、図面を参照して説明する。なお、前述した磁気ディスク10Aと共通の構成要素については、共通の符号を付して重複した説明を省略する。
磁気ディスク10Bは、図16に示すように、磁気ディスク10Aにおけるサーボパターン領域Asaに代えて、データ記録領域At,Atの間にサーボパターン領域Asbが規定されて構成されている。この場合、サーボパターン領域Asbは、磁気ディスク10Aにおけるバーストパターン領域Abaに代えて、第1バースト領域Ab1b〜第4バースト領域Ab4bを有するバーストパターン領域Abbを備えている。この場合、バーストパターン領域Abbにおける第1バースト領域Ab1b〜第4バースト領域Ab4bには、磁気ヘッド3を所望のトラックにオントラックさせるための位置検出用のパターンが凹凸パターン40によって形成されている。具体的には、図17に示すように、磁気ディスク10Bの回転方向(矢印Rの向き)に沿って複数の凸部40a,40a・・が形成されることにより、凹部40bおよび凸部40aが回転方向に沿って交互に並ぶ領域と、凹部40bが回転方向において連続する領域とが形成されている。なお、この磁気ディスク10Bでは、凸部40aの形成領域が記録領域に相当し、凹部40bの形成領域(非磁性材料15が埋め込まれた領域)が非記録領域に相当する。
また、図17に示すように、バーストパターン領域Abbには、M組のバーストパターンに相当する2組のバーストパターンBP1b,BP2bが形成されている(「M=2」の例)。具体的には、第1バースト領域Ab1bに形成された凹凸パターン40と、第2バースト領域Ab2bに形成された凹凸パターン40とによってM組のバーストパターンのうちの1つに相当するバーストパターンBP1bが構成されると共に、第3バースト領域Ab3bに形成された凹凸パターン40と、第4バースト領域Ab4bに形成された凹凸パターン40とによってM組のバーストパターンのうちの他の1つに相当するバーストパターンBP2bが構成されている。また、バーストパターン領域Abbに形成された各凸部40a,40a・・は、バースト信号単位部に相当し、磁気ディスク10Bの半径方向(同図における左右方向)に沿った長さL21(「BW」)が互いに等しくなるように形成されている。なお、同図では、理解を容易とするために、第1バースト領域Ab1b〜第4バースト領域Ab4bの各バースト領域毎に、回転方向に沿って3つの凸部40aを並べて図示しているが、実際には、各バースト領域毎に、10〜30個の凸部40a,40a・・が回転方向に沿って並んで形成されている。なお、各バースト領域中に形成するパターンについては、回転方向に沿って複数のバースト信号単位部を並べたパターンに限定されず、各バースト領域毎に回転方向に沿って単一のバースト信号単位部(凸部40a)を形成してバーストパターンを構成することもできる。
この場合、この磁気ディスク10Bでは、第1バースト領域Ab1bおよび第2バースト領域Ab2b内に半径方向に沿って複数のバーストパターンBP1b,BP1b・・が形成されると共に、第3バースト領域Ab3bおよび第4バースト領域Ab4b内に半径方向に沿って複数のバーストパターンBP2b,BP2b・・が形成されている。また、各バースト領域Ab1b〜Ab4b内に回転方向に沿って並ぶ凸部40a,40a・・の列は、それぞれ2つのバーストパターンBP1b,BP1b(またはバーストパターンBP2b、BP2b)を構成する。具体的には、図17に示すように、例えば、第1バースト領域Ab1b内において回転方向に沿って並ぶ凸部40a,40a・・の列は、その凸部40a,40a・・の列に対して第2バースト領域Ab2b内において半径方向の内周側に位置する凸部40a,40a・・の列と相俟って1つのバーストパターンBP1bを構成すると共に、その凸部40a,40a・・の列に対して第2バースト領域Ab2b内において半径方向の外周側に位置する凸部40a,40a・・の列と相俟って他の1つのバーストパターンBP1bを構成する。
また、図17に示すように、この磁気ディスク10Bでは、中心Oからバースト信号単位部(凸部40a)までの距離(一例として、中心Oとバースト信号単位部の半径方向における中心との間の距離)が第1バースト領域Ab1b〜第4バースト領域Ab4bの各バースト領域毎に互いに相違するように凹凸パターン40がバーストパターン領域Abbに形成されてバーストパターンBP1b,BP2bが形成されている。この場合、バーストパターンBP1bについては、第1バースト領域Ab1bおよび第2バースト領域Ab2bに形成された凸部40a,40a・・が2種類のバースト信号単位部に相当し、バーストパターンBP2bについては、第3バースト領域Ab3bおよび第4バースト領域Ab4bに形成された凸部40a,40a・・が2種類のバースト信号単位部に相当する。さらに、この磁気ディスク10Bでは、第1バースト領域Ab1b〜第4バースト領域Ab4bの各バースト領域内における凸部40a,40a・・の半径方向に沿った形成ピッチ(各バースト領域内における凸部40a,40a・・の半径方向における各中心の間の距離と等しい長さ:同図に示す長さL22)が互いに等しくなるように凹凸パターン40がバーストパターン領域Abbに形成されている。この場合、この磁気ディスク10Bでは、上記の長さL22がトラックピッチTpに対する2倍の長さ(「(2・M/N)・トラックピッチ」において「N=2」)となっている。
また、この磁気ディスク10Bでは、半径方向に沿った長さL20がトラックピッチTpに(2・M/N)を乗じた長さ(「(2・M/N)・トラックピッチ」:この例では、トラックピッチTpの2倍の長さ)であってその半径方向側における両端(一点鎖線で示す部位)が各バーストパターンBP1b,BP2b・・の半径方向における中心C1b,C2b・・とは一致しない範囲内(本発明における所定範囲内)において、各バーストパターンBP1b,BP2b・・の半径方向における中心C1b,C2b・・が、トラックピッチTpに対する1/2の長さ(「(1/N)・トラックピッチ」)間隔で4個(「(2・M)個」の一例)だけ存在するように第1バースト領域Ab1b〜第4バースト領域Ab4b内に凸部40a,40a・・が形成されている。この場合、この磁気ディスク10Bでは、バーストパターンBP1bの半径方向における中心C1bがデータ記録トラック(データ記録領域Atに形成された凸部40a)の半径方向における中心(トラック中心)と一致すると共に(バーストパターンBP1bの中心C1bとデータ記録トラックの中心との距離が「0」)、バーストパターンBP2bの半径方向における中心C2bとデータ記録トラックの半径方向における中心との間の距離(長さL25)がトラックピッチTpに対する1/2の長さとなるように凹凸パターン40がバーストパターン領域Abbに形成されている。
また、バーストパターンBP1b,BP1b・・は、第1バースト領域Ab1bに形成された凸部40aと、第2バースト領域Ab2bに形成された凸部40aとが回転方向において凹部40bを介して互いに離間するように形成されている(一方のバースト信号単位部と他方のバースト信号単位部とが回転方向において重ならないように形成されている)。さらに、バーストパターンBP1b,BP1b・・は、第1バースト領域Ab1bに形成された凸部40aの半径方向における中心と、第2バースト領域Ab2bに形成された凸部40aの半径方向における中心とがトラックピッチTp(本発明における「(M/N)・トラックピッチ」)と等しい長さL23だけ半径方向において離間している。また、バーストパターンBP1b,BP1b・・は、第1バースト領域Ab1bに形成された凸部40aおよび第2バースト領域Ab2bに形成された凸部40aのそれぞれの半径方向側における両端部のうちの対向する端部を含む端部領域同士がトラックピッチTp(「(M/N)・トラックピッチ」)よりも狭い長さL24だけ半径方向において重なり合うように凹凸パターン40が形成されている。この場合、磁気記録媒体における内周側領域から外周側領域までの全域において第1バースト領域Ab1bの凸部40aにおける端部領域と第2バースト領域Ab2bの凸部40aにおける端部領域とを半径方向において長さL24だけ重ね合わせる必要はなく、任意の領域のみ両凸部40a,40aの端部領域同士を半径方向において重ね合わせる構成を採用することができる。また、上記の長さL24を内周側領域から外周側領域まで同一の長さに規定せずに、内周側領域から外周側領域までの各領域毎に任意に異ならせることもできる。この場合、長さL24が長いほどPESに基づく検出可能帯域が拡がるため、例えば、磁気ディスク10Bにおける内周側において検出可能帯域が狭いことに起因して正確なトラッキングサーボ制御が困難となるおそれがある場合には、磁気ディスク10Bにおける外周側から内周側に向けて長さL24を徐々に長くする構成を採用することができる。
また、バーストパターンBP2b,BP2b・・は、第3バースト領域Ab3bに形成された凸部40aと、第4バースト領域Ab4bに形成された凸部40aとが回転方向において凹部40bを介して互いに離間するように形成されている(一方のバースト信号単位部と他方のバースト信号単位部とが回転方向において重ならないように形成されている)。さらに、バーストパターンBP2b,BP2b・・は、第3バースト領域Ab3bに形成された凸部40aの半径方向における中心と、第4バースト領域Ab4bに形成された凸部40aの半径方向における中心とがトラックピッチTp(本発明における「(M/N)・トラックピッチ」)と等しい長さL23だけ半径方向において離間している。また、バーストパターンBP2b,BP2b・・は、第3バースト領域Ab3bに形成された凸部40aおよび第4バースト領域Ab4bに形成された凸部40aのそれぞれの半径方向側における両端部のうちの対向する端部を含む端部領域同士がトラックピッチTp(「(M/N)・トラックピッチ」)よりも狭い長さL24だけ半径方向において重なり合うように凹凸パターン40が形成されている。
この場合、磁気記録媒体における内周側領域から外周側領域までの全域において第3バースト領域Ab3bの凸部40aにおける端部領域と第4バースト領域Ab4bの凸部40aにおける端部領域とを半径方向において長さL24だけ重ね合わせる必要はなく、任意の領域のみ両凸部40a,40aの端部領域同士を半径方向において重ね合わせる構成を採用することができる。また、上記の長さL24を内周側領域から外周側領域まで同一の長さに規定せずに、内周側領域から外周側領域までの各領域毎に任意に異ならせることもできる。この場合、長さL24が長いほどPESに基づく検出可能帯域が拡がるため、例えば、磁気ディスク10Bにおける内周側において検出可能帯域が狭いことに起因して正確なトラッキングサーボ制御が困難となるおそれがある場合には、磁気ディスク10Bにおける外周側から内周側に向けて長さL24を徐々に長くする構成を採用することができる。なお、前述したアクチュエータ3b(一例として、VCM)は、記録データの正確な記録再生を実行するために、一般的には、そのトラッキング精度(機械精度)がトラックピッチTpの5%以下となるように設計されている。言い換えれば、アクチュエータ3bによって駆動される磁気ヘッド3は、記録データの記録再生時にトラックピッチTpの5%程度を上限とする所定の範囲内で磁気ディスク10Bの半径方向で常に微動している。したがって、PESに基づく磁気ヘッド3の位置検出についての検出可能帯域を確実に拡げるためには、上記のバーストパターンBP1b,BP2bにおける長さL24(バーストパターンを構成する2種類のバースト信号単位部の半径方向における重なり量)をトラックピッチTpの5%以上の長さとするのが好ましい。
また、この磁気ディスク10Bでは、本発明における「M」および「N」の双方が上記のように「2」となるように形成されている。したがって、本発明における磁気記録媒体が満たすべき条件式「(1−M)・Tp/N+BW≦Wr≦(3・M−1)・Tp/N−BW」に「M=2」および「N=2」を当て嵌めると、磁気ヘッド3における再生用素子Rbの幅Wrが、「長さL21からトラックピッチTpに対する1/2の長さを差し引いた長さ」である幅Wr1b(図17参照)以上であって、「トラックピッチTpに対する5/2の長さから長さL21を差し引いた長さ」である幅Wr2b(図17参照)以下の範囲内であれば、磁気ディスク10Bが上記の条件式を満たすこととなる。以下、本明細書では、一例として、磁気ヘッド3における再生用素子Rbの幅Wrが「長さL21−1/2・トラックピッチTp」であるものとして説明する。なお、この磁気ディスク10Bを用いる際の磁気ヘッド3における再生用素子Rbの幅(最小の幅Wr1bおよび最大の幅Wr2b)については、後に詳細に説明する。
この磁気ディスク10Bの製造に際しては、前述した磁気ディスク10Aの製造時と同様にして、図6に示す中間体20と図7に示すスタンパー30とを使用する。この場合、この磁気ディスク10Bを製造するためのスタンパー30は、磁気記録媒体製造用のスタンパーの一例であって、磁気ディスク10Bにおける凹凸パターン40(データトラックパターン40tおよびサーボパターン40sb)を形成するための凹凸パターン41を形成可能な凹凸パターン39が形成されて、インプリント法による磁気ディスク10Bの製造が可能に構成されている。この場合、スタンパー30の凹凸パターン39は、凸部39a,39a・・が磁気ディスク10Bの凹凸パターン40における凹部40b,40b・・(非記録領域)に対応し、凹部39b,39b・・が凹凸パターン40における凸部40a,40a・・(記録領域)に対応して形成されている。なお、このスタンパーを用いたインプリント方による磁気ディスク10Bの製造方法については、前述した磁気ディスク10Aの製造方法と同様であるため、詳細な説明を省略する。
この磁気ディスク10Bでは、図18に示すように、例えば、第1バースト領域Ab1bに形成されている凸部40aにおける半径方向側の端部を含む端部領域と、第2バースト領域Ab2bに形成されている凸部40aにおける半径方向側の端部を含む端部領域とが、トラック中心(データ記録トラックの半径方向における中心)において半径方向で重なるようにバーストパターンBP1bが形成されている。したがって、この磁気ディスク10Bでは、両バースト領域Ab1b,Ab2bに形成されている凸部40a(バースト信号単位部)における半径方向に沿った長さL21がトラックピッチTpよりも長くなっている。この結果、磁気ディスク10Bに対する磁気ヘッド3の位置が変化して、磁気ヘッド3(再生用素子Rb)が例えば位置P1から矢印Aの向きで位置P2まで磁気ディスク10Bに対して移動したときには、第1バースト領域Ab1bにおける磁気ヘッド3からの出力信号の出力レベルが実線Abで示す状態となる。また、磁気ヘッド3が例えば位置P3から矢印Bの向きで位置P4まで磁気ディスク10Bに対して移動したときには、第2バースト領域Ab2bにおける磁気ヘッド3からの出力信号の出力レベルが実線Bbで示す状態となる。この場合、実線Abで示す出力信号をS1とし、実線Bbで示す出力信号をS2としたときに、バーストパターンBP1bによって得られるPESは、「(S1−S2)/(S1+S2)」となる。したがって、バーストパターンBP1bによって得られるPESは、同図に実線で示す特性となる。
一方、従来の磁気ディスク10x1では、前述したように、磁気ヘッド(再生用素子Rx)が例えば位置P1から矢印Aの向きで位置P2まで磁気ディスク10x1に対して移動したときには、磁気ヘッドからの出力信号の出力レベルが一点鎖線Axで示す状態となる。また、磁気ヘッドが例えば位置P3から矢印Bの向きで位置P4まで磁気ディスク10x1に対して移動したときには、磁気ヘッドからの出力信号の出力レベルが一点鎖線Bxで示す状態となる。この結果、従来の磁気ディスク10x1におけるサーボパターンPs1,Ps2によって得られるPESは、同図に一点鎖線で示す特性となる。
この場合、磁気ヘッド3が位置P0(この例では、トラック中心)に位置している状態から矢印Cの向きに移動したときに、従来の磁気ディスク10x1では、磁気ヘッドの位置をPESに基づいて検出可能な範囲が位置P0から位置Pxcまでの範囲となっている。これに対して、磁気ディスク10Bでは、制御部6がPESに基づいて位置P0から位置Pbcまでの広い範囲内において磁気ヘッド3の位置を検出することが可能となっている。また、磁気ヘッド3が位置P0から矢印Dの向きに移動したときに、従来の磁気ディスク10x1では、磁気ヘッドの位置をPESに基づいて検出可能な範囲が位置P0から位置Pxdまでの範囲となっている。これに対して、磁気ディスク10Bでは、制御部6がPESに基づいて位置P0から位置Pbdまでの広い範囲内において磁気ヘッド3の位置を検出することが可能となっている。したがって、磁気ディスク10Bでは、磁気ヘッド3がトラック中心から大きく位置ずれした状態であってもPESに基づいてその位置を検出して所望のトラックにオントラックさせることが可能となっている。
また、この磁気ディスク10Bでは、前述したように、磁気ヘッド3の幅Wrと、データトラックパターン40tにおける凸部40aの半径方向に沿った形成ピッチ(トラックピッチTp)と、第1バースト領域Ab1b〜第4バースト領域Ab4bに形成された凸部40aの半径方向に沿った長さL21(「BW」)とが、「(1−M)・Tp/N+BW≦Wr≦(3・M−1)・Tp/N−BW」の条件式を満たす関係となるようにデータトラックパターン40tおよびサーボパターン40sbが形成されている。したがって、この磁気ディスク10Bでは、データトラックパターン40tおよびサーボパターン40sbにおける各部の長さによって再生用素子Rbの幅Wrが一義的に規定されることなく、再生用素子Rbの幅Wrを比較的自由に規定することが可能となっている。言い換えれば、従来の磁気ディスク10x1とは異なり、磁気ヘッド3における再生用素子Rbの幅Wrによって一義的に規定されることなく、データトラックパターン40tおよびサーボパターン40sbにおける各部の長さを規定することが可能となっている。
具体的には、図19に示すように、この磁気ディスク10Bでは、第1バースト領域Ab1bに形成された凸部40aの半径方向に沿った形成ピッチである長さL22が、トラックピッチTpの2倍の長さ(「(M/N)・Tp・2」)となっている。この場合、上記の長さL22は、前述した長さL20(所定範囲の半径方向に沿った長さ)と等しい長さとなっている。このため、この磁気ディスク10Bでは、バーストパターンBP1b,BP2b・・の半径方向における中心C1b,C2b・・が長さL22の範囲内にトラックピッチTpに対する1/2の長さ間隔で(「(1/N)・トラックピッチ」の間隔で)4個(「(2・M)個」)だけ存在することとなる。具体的には、第1バースト領域Ab1b〜第4バースト領域Ab4b内の各凸部40a,40a・・(バースト信号単位部)は、その半径方向の両端側にバーストパターンBP1b,BP2b・・の中心C1b,C2b・・が存在するように形成されている。したがって、例えば第1バースト領域Ab1bにおいては、凸部40aの半径方向に沿った形成ピッチである上記の長さL22の範囲内に2つのバーストパターンBP1b,BP1bの半径方向における中心C1b,C1bが存在する。また、長さL22の範囲内には、2組(M組)のバーストパターンBP1b,BP2bの半径方向における中心C1b,C2b、すなわち、4個(「(2・M)個」)の中心C1b,C2b・・が存在する。
したがって、この磁気ディスク10Bでは、例えば1つのバーストパターンBP1bによって得られるPESに基づいて磁気ヘッド3をトラッキングサーボ制御すべき範囲の半径方向に沿った長さL26が、上記の長さL22に対する1/4の長さ(「1/(2・M)」)となる。この場合、この長さL26は、トラックピッチTpに対する1/2の長さ(「(M/N)・Tp・2/(2・M)=(1/N)・Tp」)であり、この磁気ディスク10Bでは、トラックピッチTpに対する1/2の長さがデータ記録トラックの幅およびトラック間凹部の幅と等しい長さL26となっている。つまり、この磁気ディスク10Bでは、バーストパターンBP1bによって得られるPESに基づいて磁気ヘッド3をトラッキングサーボ制御すべき範囲がデータ記録トラックの幅およびトラック間凹部の幅と等しい長さL26の範囲内となる。また、第1バースト領域Ab1bに形成された凸部40aの端部を含む端部領域と、第2バースト領域Ab2bに形成された凸部40aの端部を含む端部領域とが半径方向において重なり合っている長さL24は、凸部40aの長さL21から、上記の長さL22に対する1/2の長さを差し引いた長さ(「BW−(M/N)・Tp」)であり、これは、長さL21からトラックピッチTpを差し引いた長さと等しくなる。
この場合、トラッキングサーボ制御すべき範囲(長さL26)の一方の端部である位置P5に再生用素子Rbが位置している状態(再生用素子Rbにおける幅方向の中心が位置P5に重なる状態)において、再生用素子Rbの幅Wrが同図に示す幅Wr1bよりも狭いときには、再生用素子Rbの端部と、第1バースト領域Ab1bに形成された凸部40aの端部との間に半径方向(トラッキングサーボ制御方向)において隙間が生じる。この隙間がすなわち不感帯となるため、再生用素子Rbの幅Wrは、同図に示す幅Wr1b以上である必要がある。この幅Wr1bは、同図に示すように、長さL24aと長さL26aとの和に対する2倍の長さとなっている。この場合、長さL24aは、上記の長さL24に対する1/2の長さで、長さL26aは、上記の長さL26に対する1/2の長さ(「Tp/(2・N)」)となっている。つまり、幅Wr1bに対する1/2の長さは、上記の長さL21からトラックピッチTpを差し引いた長さ(上記の長さL24)に対する1/2の長さ(長さL24a:「BW/2−(M/N)・Tp/2」)と、トラックピッチTpに対する1/2の長さ(上記の長さL26)に対する1/2の長さ(長さL26a:「Tp/(2・N)」)との和、すなわち、長さL21に対する1/2の長さからトラックピッチTpに対する1/4の長さを差し引いた長さ(「(1−M)・Tp/(2・N)+BW/2」)となる。したがって、幅Wr1bは、長さL21(BW)からトラックピッチTpに対する1/2の長さ(「(M−1)・Tp/N」)を差し引いた長さとなり、この長さは、本発明における条件式中の「(1−M)・Tp/N+BW」と一致する。
一方、トラッキングサーボ制御すべき範囲(長さL26)の他方の端部である位置P6に再生用素子Rbが位置している状態(再生用素子Rbにおける幅方向の中心が位置P6に重なる状態)において、再生用素子Rbの幅Wrが同図に示す幅Wr2bよりも広いときには、再生用素子Rbの端部が、第1バースト領域Ab1bに形成された隣の凸部40a側に半径方向(トラッキングサーボ制御方向)ではみ出した状態となる。このはみ出し量がすなわち不感帯となるため、再生用素子Rbの幅Wrは、同図に示す幅Wr2b以下である必要がある。この幅Wr2bは、上記の長さL22から長さL21を差し引いた長さL27(「(M/N)・Tp・2−BW」)から、長さL28を差し引いた長さの2倍の長さとなっている。この場合、長さL28は、上記の長さL26に対する1/2の長さから、長さL24aを差し引いた長さ、すなわち、トラックピッチTpに対する1/2の長さである長さL26に対する1/2の長さ(「Tp/(2・N)」)から長さL24a(「BW/2−(M/N)・Tp/2」)を差し引いた長さとなっている。つまり、幅Wr2bに対する1/2の長さは、上記の長さL27から、トラックピッチTpに対する1/4の長さ(「Tp/(2・N)」)を差し引いた長さと、長さL24aとの和の長さ(「(3・M−1)・Tp/(2・N)−BW/2」)となる。したがって、幅Wr2bは、トラックピッチTpに対する5/2の長さ(「(3・M−1)・Tp/N」)から長さL21(BW)を差し引いた長さとなり、この長さは、本発明における条件式中の「(3・M−1)・Tp/N−BW」と一致する。
以上のように、磁気ディスク10Bは、「(1−M)・Tp/N+BW≦Wr≦(3・M−1)・Tp/N−BW」との条件を満たすようにトラックピッチTpや長さL26が規定されている。したがって、上記のように規定される幅Wr1bから幅Wr2bまでの各種幅Wrの再生用素子Rbに対して、磁気ディスク10Bは、不感帯を生じさせることなく磁気ディスク10B上における磁気ヘッド3(再生用素子Rb)の位置を特定させることが可能となっている。この場合、この磁気ディスク10Bでは、バーストパターンBP1b,BP2b・・の半径方向における各中心C1b,C2b・・の半径方向に沿った間隔が(1/2)・トラックピッチTp(「(1/N)・トラックピッチ」においてN=2の例)となるようにバーストパターン領域AbbにバーストパターンBP1b,BP2b・・が形成されている。したがって、前述した磁気ディスク10Aと同様にして、再生用素子Rbの幅WrがトラックピッチTpよりも狭い場合であっても不感帯を生じさせることなく磁気ディスク10B上における磁気ヘッド3(再生用素子Rb)の位置を特定させることが可能となっている。このため、必要に応じて幅WrがトラックピッチTpよりも狭い再生用素子Rbを用いることで、サイドリード現象の発生を回避することができる。
また、この磁気ディスク10Bでは、バーストパターンBP1b,BP2b・・の半径方向に沿った形成ピッチを(1/2)・トラックピッチTp(「(1/N)・トラックピッチ」における「N」が「2以上の自然数」である「2」の例)としている。したがって、前述した磁気ディスク10Aと同様にして、いずれのデータ記録トラックに対しても、PESの値に基づいてそのトラック中心に再生用素子Rbを位置させる処理を容易に実行することが可能となっている。また、各バーストパターンBP1b,BP1b・・の半径方向に沿った中心C1b,C1b・・とトラック中心とを一致させたことにより、PESの値が「0」のときに再生用素子Rbがトラック中心に位置していると特定することが可能となる。これにより、磁気ディスク10Aと同様にして、煩雑な処理を不要としつつ、再生用素子Rbを容易にトラック中心に位置させることが可能となっている。
このように、この磁気ディスク10Bおよびハードディスクドライブ1によれば、凸部40a(記録領域)で構成された2種類のバースト信号単位部を有するバーストパターンBP1b,BP2b・・を回転方向に沿ってM組(この例では2組)形成すると共に、内周側領域から外周側領域までの各領域のうちの少なくとも一部分(この例では、全域)において、第1バースト領域Ab1bおよび第2バースト領域Ab2bに形成された凸部40a,40aの半径方向において対向する両端部を含む端部領域が半径方向において重なり合い、第3バースト領域Ab3bおよび第4バースト領域Ab4bに形成された凸部40a,40aの半径方向において対向する両端部を含む端部領域が半径方向において重なり合うように各バースト信号単位部を形成したことにより、PESに基づく磁気ヘッド3(再生用素子Rb)の位置検出についての検出可能帯域を十分に拡げることができる結果、バーストパターンBP1b,BP2b・・に対応して磁気ヘッド3から出力される出力信号にノイズ等に起因する変動が生じたとしても、磁気ヘッド3の位置ずれを確実に検出して正確なトラッキングサーボ制御の実行を可能とすることができる。また、1組のバーストパターンしか存在しない(「M=1」である)従来の磁気ディスク10x1とは異なり、磁気ヘッド3における再生用素子Rbの幅WrとトラックピッチTpとを一致させる必要がないため、データトラックパターン40tおよびサーボパターン40sbについての設計の自由度を高めることができる。また、2組(「M=2」)のバーストパターンを備えるものの各バーストパターンにおける半径方向の各中心がトラックピッチと等しい間隔で配置されている従来の磁気ディスク10x2とは異なり、再生用素子Rbの幅WrをトラックピッチTpよりも広くする必要がないため、サイドリード現象の発生を十分に抑制することができる。
また、この磁気ディスク10Bを搭載したハードディスクドライブ1によれば、本発明における磁気記録媒体が満たすべき「(1−M)・Tp/N+BW≦Wr≦(3・M−1)・Tp/N−BW」の条件を満たすように磁気ディスク10BのバーストパターンBP1b,BP2bを形成したことにより、上記の条件に当て嵌まる幅Wrの再生用素子Rbを有する磁気ヘッド3を使用することでバーストパターンについての不感帯を生じさせることなく、PESに基づく磁気ヘッド3(再生用素子Rb)の位置検出についての検出可能帯域を十分に拡げることができ、正確なトラッキングサーボ制御の実行を可能とすることができる。この場合、従来の磁気ディスク10x1とは異なり、再生用素子Rbの幅によってトラックピッチTpやバースト信号単位部(凸部40a)の半径方向に沿った長さL21が一義的に規定されることがないため、データトラックパターンおよびサーボパターンについての設計の自由度を高めることができる。これにより、トラック密度の向上や、サイドリード現象の回避等の目的に応じてトラックピッチTpやバースト信号単位部(凸部40a)の半径方向に沿った長さL21を適宜変更することができる。また、従来の磁気ディスク10x2とは異なり、再生用素子Rbの幅WrをトラックピッチTpよりも広くする必要がないため、サイドリード現象の発生を十分に抑制することができる。これにより、高密度記録が可能で、しかも、再生エラーが生じ難い磁気ディスク10Bを搭載したハードディスクドライブ1を提供することができる。
さらに、上記のスタンパー30によれば、磁気ディスク10Bの凹凸パターン40の凹部40b,40b・・(非記録領域)に対応して形成された凸部39a,39a・・と、磁気ディスク10Bにおける凹凸パターン40の凸部40a,40a・・(記録領域)に対応して形成された凹部39b,39b・・とを有する凹凸パターン39を備えたことにより、PESに基づく磁気ヘッド3の位置検出についての検出可能帯域が十分に拡いバーストパターンBP1b,BP2b・・を有する磁気ディスク10Bをインプリント法等によって容易に製造することができる。
なお、上記の磁気ディスク10Aでは、M組のバーストパターンとしての2組のバーストパターンBP1a,BP2aが形成され、磁気ディスク10Bでは、2組のバーストパターンBP1b,BP2bが形成されているが、Mの値は「2」に限定されず、3以上であってもよい。同様にして、本発明における各バーストパターンの半径方向における中心間距離(中心が存在する間隔)を規定する「(1/N)・トラックピッチ」における「N」については、「3」以上の任意の自然数を選択することができる。また、上記の磁気ディスク10A,10Bでは、一方のバースト信号単位部と他方のバースト信号単位部とが回転方向において離間するようにバーストパターンが形成されているが、両バースト信号単位部を回転方向において必ずしも離間させる必要はなく、両バースト信号単位部が回転方向において接するように(回転方向において重ならないように形成した他の一例)バーストパターンを形成することができる。
さらに、上記の磁気ディスク10A,10Bでは、凹凸パターン40における凸部40aの突端部(磁気ディスク10A,10Bの表面側)から基端部までの全体が磁性層14(磁性材料)で形成されているが、本発明におけるパターンを構成する記録領域および非記録領域の構成はこれに限定されない。具体的には、例えば、図20に示す磁気ディスク10Cのように、ガラス基材11に形成した凹凸パターン(凹凸パターン40と凹凸の位置関係が同様の凹凸パターン)を覆うようにして薄厚の磁性層14を形成することにより、その表面が磁性材料で形成された複数の凸部40a(記録領域)と、底面が磁性材料で形成された複数の凹部40b(非記録領域)とによって本発明におけるパターンに相当する凹凸パターン40を構成することができる。また、図21に示す磁気ディスク10Dのように、凸部40a(記録領域)だけではなく凹部40b(非記録領域)の底部を含めて磁性層14で形成して本発明におけるパターンに相当する凹凸パターン40を構成することもできる。さらに、例えば凹凸パターン40における凸部40aの突端部(磁気記録媒体の表面側:同図における上端部)のみが磁性層14で形成されて基端部側が非磁性材料または軟磁性材料等で形成された凸部40a,40a・・(記録領域)を備えて本発明におけるパターンに相当する凹凸パターン40を構成することができる(図示せず)。このように、本発明における磁気記録媒体の記録領域および非記録領域を凹凸パターンによって形成するときには、記録領域を構成する凸部の少なくとも突端部を磁性材料で形成することで、磁気的信号を読み出し可能に保持する能力を非記録領域よりも十分に高くすることができる。
また、スタンパー30の凹凸パターン39を中間体20の樹脂層18にインプリント法によって転写して形成した凹凸パターン41を用いて凹凸パターン42を形成すると共に、形成した凹凸パターン42をマスクとして用いて磁性層14をエッチング処理することで凸部40a(記録領域)および凹部40b(非記録領域)を有する凹凸パターン40を形成した磁気ディスク10A,10Bについて説明したが、本発明における磁気記録媒体の製造方法および構成はこれに限定されない。例えば、磁気的信号を読み出し可能に保持する能力が低い各種の材料、または、その能力を実質的に有しない各種の材料(一例として、非磁性材料)で形成した層に、上記の凹凸パターン40とは凹凸位置関係を反転させた凹凸パターン(凸部が非磁性材料等で構成された凹凸パターン)を形成し、この凹凸パターンの凹部内に磁気的信号を読み出し可能に保持する能力が高い各種の材料(一例として、磁性材料)を埋め込むことで磁気記録媒体を構成することができる(図示せず)。この場合、この製造方法に従って製造した磁気記録媒体では、非磁性材料等の層に形成された凹凸パターン(上記の磁気ディスク10Bにおける凹凸パターン40とは凹凸位置関係を反転させた凹凸パターン)における凸部の形成領域が本発明における非記録領域に相当し、その凹凸パターンにおける凹部の形成領域(磁性材料を埋め込んだ領域)が本発明における記録領域に相当する。
また、非磁性材料等の層に形成した凹凸パターンの凹部内に磁性材料を埋め込んだ磁気記録媒体の製造に際して非磁性材料等の層に凹凸パターンを形成するときには、前述したスタンパー30の凹凸パターン39とは凹凸位置関係を反転させた凹凸パターンを有するスタンパー(図示せず)を用いることで、インプリント法によってマスクパターンを形成すればよい。この場合、このスタンパー(前述した凹凸パターン39とは凹凸位置関係を反転させた凹凸パターンを有するスタンパー)は、磁気記録媒体製造用のスタンパーの他の一例であって、記録領域(磁性材料を埋め込んだ領域)に対応して凸部が形成されると共に、非記録領域(非磁性材料等の層に形成した凹凸パターンにおける凸部の形成領域)に対応して凹部が形成されている。
さらに、上記の磁気ディスク10A,10Bでは、複数の同心円状、または、螺旋状の凸部40a(記録領域)を有する凹凸パターン40によってデータ記録領域Atにデータトラックパターン40tが形成されているが、本発明はこれに限定されず、データトラックパターンにおけるデータ記録トラックを構成する記録領域が磁気記録媒体の周方向において非記録領域を挟むようにして互いに分離させられているパターンド媒体に適用することができる。また、連続磁性層で構成されたデータ記録領域に各種記録データが磁気的に書き込まれることでデータトラックパターンが形成される磁気記録媒体であって、サーボパターンが記録領域および非記録領域を有するパターン(例えば、上記の凹凸パターン40)によって形成された磁気記録媒体に適用することができる。さらに、基材上に形成した連続磁性層の磁気的特性をイオン照射等によって部分的に変化させることにより、本発明における記録領域と非記録領域とを有するパターンを連続磁性層に形成して磁気記録媒体を構成することができる(図示せず)。加えて、本発明における磁気記録媒体は、磁気ディスク10A,10Bのような垂直記録方式の磁気記録媒体に限定されず、面内記録方式の磁気記録媒体にも適用することができる。