JP4294558B2 - 角度検出信号処理装置 - Google Patents
角度検出信号処理装置 Download PDFInfo
- Publication number
- JP4294558B2 JP4294558B2 JP2004242664A JP2004242664A JP4294558B2 JP 4294558 B2 JP4294558 B2 JP 4294558B2 JP 2004242664 A JP2004242664 A JP 2004242664A JP 2004242664 A JP2004242664 A JP 2004242664A JP 4294558 B2 JP4294558 B2 JP 4294558B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- angle
- phase
- unit
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03M—CODING; DECODING; CODE CONVERSION IN GENERAL
- H03M1/00—Analogue/digital conversion; Digital/analogue conversion
- H03M1/12—Analogue/digital converters
- H03M1/48—Servo-type converters
- H03M1/485—Servo-type converters for position encoding, e.g. using resolvers or synchros
Description
しかしながら、極めて高信頼性が要求される用途ではそれらも十分ではない。ホール素子を用いる方法は熱や振動に堅牢とはいえないし、光学的方法は油等の汚れに脆弱であり、そのうえ光源を必要とすることからその信頼性も問題になる。

2相励磁2相出力型のレゾルバより出力される信号VI、VQは次式で表される。
図31はその信号処理を表すブロック図である。まず信号VIおよびVQの加減算により信号VPおよびVNを求める。次にコンパレータを通して信号VPおよびVNのゼロクロスを求める。そして、例えばその立ち上がりエッジを微分回路により算出し、信号VPとVNの立ち上がりエッジ間におけるクロックパルスの数をカウンタで計数すると、それは求める角度θ(t)に比例する。従って、このカウンタの計数値から角度θ(t)をデジタル変換した出力が取り出せる。
例えば12ビットの角度データを得るために少なくとも11ビットの分解能、望ましくは12ビットの分解能を有するサイン信号およびコサイン信号のROM(Read only memory)が用意され、任意の角度φ(t)に対してサイン信号Sinφ(t)およびコサイン信号Cosφ(t)が生成される。これらは、D/A変換器(DAC)においてアナログ信号に変換される。求めるべき角度θ(t)に対して角度φ(t)を追従させるため、まずレゾルバより出力される信号VIにサイン信号Sinφ(t)が乗ぜられるとともに、信号VQにコサイン信号Cosφ(t)が乗ぜられる。そして、前者を反転して後者に加算することにより、次式に示す信号V1が生成される。
図34の例において、信号VPがゼロクロスする時刻t1からクロックパルスCPのカウントが開始され、信号VNがゼロクロスする時刻t2でカウントが終了する。このカウンタ値は、角度θ(t)を反映しており、そのまま角度のデジタル値として使うことが可能である。カウント値は、時刻t2において1つ取り出される。
こうした不利益があることから、ゼロクロス点によって角度を求めるR−D変換装置は、例えば高速で回転する軸の角度をリアルタイムで得るような応用には適さない。
すなわち、複雑なバイポーラVCOやアップダウンカウンタを必要とする。また、12ビット分解能を得るためには最低11ビット、望ましくは12ビットの分解能と精度を持つ大容量のサイン/コサインROMと高分解能のD/A変換器を必要とする。
そのため、従来の高精度なR−D変換装置においては、ギルバート型乗算回路に替えて乗算型D/A変換器等を用いる等により乗算回路の精度の制約を回避する必要があった。従ってアナログ乗算回路の実現手段も、高精度を実現するためには消費電力の増大とコストの増加を招く要因となっていた。
上記信号処理部は、上記第1の角度検出信号と上記第2の角度検出信号とに基づいて、上記第1の周波数を有するとともに上記第1の角度に応じた位相差を有する第1の信号および第2の信号を出力する。
上記第1の位相ロック部は、上記第1の信号に位相をロックさせた第1の位相ロック信号を生成し、当該第1の位相ロック信号の位相角を示す第1のデータを出力する。
上記第2の位相ロック部は、上記第2の信号に位相をロックさせた第2の位相ロック信号を生成し、当該第2の位相ロック信号の位相角を示す第2のデータを出力する。
上記位相差演算部は、上記第1のデータと上記第2のデータとに基づいて、上記第1の位相ロック信号と上記第2の位相ロック信号との位相差を演算する。
上記信号処理部において、上記第1の角度検出信号と上記第2の角度検出信号とに基づいて、上記第1の周波数を有するとともに上記第1の角度に応じた位相差を有する第1の信号および第2の信号が生成される。上記第1の位相ロック部では、上記第1の信号に位相をロックさせた第1の位相ロック信号が生成され、当該第1の位相ロック信号の位相角を示す第1のデータが出力される。上記第2の位相ロック部では、上記第2の信号に位相をロックさせた第2の位相ロック信号が生成され、当該第2の位相ロック信号の位相角を示す第2のデータが出力される。そして、上記位相差演算部において、上記第1のデータと上記第2のデータとに基づいて、上記第1の位相ロック信号と上記第2の位相ロック信号との位相差が演算される。
これにより、上記第1の信号および上記第2の信号の位相差は上記第1の角度に応じた値を持つ。また、これらの信号に位相ロックした上記第1の位相ロック信号および上記第2の位相ロック信号の位相差も、上記第1の信号および上記第2の信号の位相差に応じた値を持つ。従って、上記第1の位相ロック信号および上記第2の位相ロック信号の位相差は、上記第1の角度に応じた値を持つ。すなわち、上記位相差演算部の演算結果の位相差は、上記第1の角度に応じた値を持つ。
上記第1、第2の位相ロック部においては、何れも上記第1の周波数を有する信号に位相がロックされるため、仮に上記第1の角度が周波数ゼロの一定値になる場合でも、上記第1、第2の位相ロック信号は上記第1の周波数を持つように制御される。そのため、上記第1、第2の位相ロック信号の位相角を示す上記第1、第2のデータを出力するために、例えばバイポーラVCOのような周波数ゼロで発振する手段を設ける必要がない。
また、上記第1の信号と上記第2の信号との位相差を、ゼロクロス点の時間差により求めるのではなく、上記第1、第2の位相ロック部において刻々に出力される上記第1、第2のデータに基づいて求めるため、上記第1の角度の情報をリアルタイムで取得することが可能になる。また、ゼロクロス点を用いる方法に比べて、外来ノイズの影響を受け難くなる。
この場合、上記信号処理部は、上記第1の角度検出信号を実部成分、上記第2の角度検出信号を虚部成分とする複素信号を上記第1の信号として上記第1の位相ロック部に出力
するとともに、上記第1の角度検出信号を実部成分、上記第2の角度検出信号の極性を反転させた信号を虚部成分とする複素信号を上記第2の信号として上記第2の位相ロック部に出力する。
上記第1の位相ロック部および上記第2の位相ロック部は、位相角データ生成部と、複素信号処理部と、帰還部とを有する。
上記位相角データ生成部は、入力される帰還制御信号に応じた周期で反復されるデータであって、当該周期内の位相角を示すデータを、上記第1のデータもしくは上記第2のデータとして生成する。
上記複素信号処理部は、上記信号処理部から入力される第1の複素信号と、上記位相角データ生成部において生成されるデータに応じた位相角を有し互いに直交する第1信号成分および第2信号成分を含み、周波数が上記第1の複素信号の周波数に対して異なる極性に設定される第2の複素信号とを乗算した場合に得られる複素信号の偏角に応じた信号を生成する。
上記帰還部は、上記複素信号処理部において生成される信号に応じて、上記偏角が一定値に収束するように帰還制御を働かせる上記帰還制御信号を生成する。
上記位相角データ生成部において生成されるデータは、上記帰還制御信号に応じた周期で反復されるデータであって、当該周期内の位相角を示すデータである。そのため、このデータに応じた位相角を有する上記第1信号成分および上記第2信号成分は、いずれも、上記帰還制御信号に応じた周波数を有する。すなわち、上記第2の複素信号は、上記帰還制御信号に応じた大きさの周波数を有するとともに該周波数が上記第1の複素信号の周波数に対して異なる極性に設定された複素信号である。
上記複素信号処理部においては、この第2の複素信号と上記第1の複素信号とを乗算した場合に得られる複素信号の偏角に応じた信号が生成される。
上記第2の複素信号と上記第1の複素信号とを乗算した場合に得られる複素信号の偏角は、上記第1の複素信号の偏角と上記第2の複素信号の偏角とを足し合わせた偏角に等しい。そのため、上記複素信号処理部においては、この足し合わせた偏角に応じた信号が生成される。
そして、上記帰還部では、上記複素信号処理部において生成された信号に応じて、上記足し合わせた偏角が一定値(例えばゼロ)に収束するように帰還制御を働かせる上記帰還制御信号が生成される。
偏角が一定になるということは、偏角が時間的に一定で、周波数がゼロになることに相当する。したがって、上記足し合わせた偏角が一定値に収束するためには、上記第1の複素信号および上記第2の複素信号が、互いに等しい大きさで極性が正負に反対の周波数を持っている必要がある。
そのため、上記第2の複素信号が負の周波数を持つ場合、この負の周波数が上記第1の複素信号の正の周波数を相殺するように、上記第2の複素信号の周波数が制御される。上記第2の複素信号が正の周波数を持つ場合は、この正の周波数が上記第1の複素信号の負の周波数を相殺するように、上記第2の複素信号の周波数が制御される。
これに対して、上記第2の複素信号と上記第1の複素信号とが同一極性の周波数を持っていると、上記足し合わされた偏角は常に周波数を持ち、これを一定値に収束させることができない。そのため、この場合、上記帰還制御が働かず、上記第2の複素信号の周波数は上記第1の複素信号の周波数に追従しない。
以上のことから、上記第1、第2の位相ロック部においてそれぞれ位相がロックされる上記第2の複素信号は、何れも、入力される上記第1の複素信号に含まれる特定の極性(上記第1の複素信号の周波数に対して異なる極性)の周波数成分に対して位相をロックさせた信号になる。
ところで、上記第1の位相ロック部に入力される上記第1の複素信号(上記第1の信号)は、上記第1の周波数を有する余弦関数の信号の振幅が上記第1の角度を有する余弦関数の信号によって変調された第1の角度検出信号を実部成分とし、上記第1の周波数を有する余弦関数の信号の振幅が上記第1の角度を有する正弦関数の信号によって変調された
第2の角度検出信号を虚部成分とする複素信号である。この複素信号は、上記第1の周波数を持ち、その符号が互いに異なる、正と負の周波数成分を有している。
また、上記第2の位相ロック部に入力される上記第1の複素信号(上記第2の信号)は、上記第1の角度検出信号を実部成分とし、上記第2の角度検出信号の極性反転信号を虚部成分とする複素信号である。この複素信号も、上記第1の周波数を持ち、その符号が互いに異なる、正と負の周波数成分を有している。
ただし、この上記第1の信号と上記第2の信号との間で同一極性の周波数を持つ信号成分同士を比較すると、正負何れの周波数についても、上記第1の角度に応じた位相差を有している。
そのため、このような上記第1、第2の信号に位相がロックされる上記第1、第2の位相ロック部の上記第2の複素信号も、同様に、上記第1の角度に応じた位相差を有している。
従って、これら2つの第2の複素信号の位相差を示す上記第1のデータおよび上記第2のデータに基づいて上記位相差演算部により演算される位相差は、上記第1の角度に応じた値を持つ。
上記複素信号生成部は、上記第1の演算部は、上記位相角データ生成部において生成されるデータに応じた位相角を有し互いに直交する上記第1信号成分および上記第2信号成分をそれぞれ生成する。
上記第1の演算部は、上記複素信号生成部において生成される上記第1信号成分と上記第1の複素信号の実部成分とを掛け合わせる。
上記第2の演算部は、上記複素信号生成部において生成される上記第2信号成分と上記第1の複素信号の虚部成分とを掛け合わせる。
上記第3の演算部は、上記第2の演算部および上記第2の演算部の演算結果の和もしくは差を演算する。
この和もしくは差の演算結果は、上記第1の複素信号と上記第2の複素信号とを乗算した場合に得られる複素信号の実部または虚部に相当する信号になる。
上記第4の演算部は、1周期を区分する複数の角度範囲の間で、上記位相角データ生成部のデータが示す位相角が別の角度範囲に移る場合、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での上記第1信号成分の瞬時値に応じた重み係数を選択して、上記第1の複素信号の実部成分に掛け合わせる。
上記第5の演算部は、1周期を区分する複数の角度範囲の間で、上記位相角データ生成部のデータが示す位相角が別の角度範囲に移る場合、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での上記第2信号成分の瞬時値に応じた重み係数を選択して、上記第1の複素信号の虚部成分に掛け合わせる。
上記第6の演算部は、上記第4の演算部および上記第5の演算部の演算結果の和もしくは差を演算する。
上記第5の演算部では、1周期を区分する複数の角度範囲の間で、上記位相角データ生成部のデータが示す位相角が別の角度範囲に移る場合に、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での上記第2信号成分の瞬時値に応じた重み係数が選択されて、上記第1の複素信号の虚部成分に掛け合わされる。これにより、上記第2信号成分と上記第1の複素信号の虚部成分との乗算結果が得られる。
そして、上記第6の演算部において、上記第4の演算部および上記第5の演算部の乗算結果の和もしくは差が演算されると、その演算結果は、上記第1の複素信号と上記第2の複素信号とを乗算した場合に得られる複素信号の実部または虚部に相当する信号になる。
この場合、上記信号処理部は、上記第1の角度検出信号と上記第2の角度検出信号との差を上記第1の信号として上記第1の位相ロック部に出力するとともに、上記第1の角度検出信号と上記第2の角度検出信号との和を上記第2の信号として上記第2の位相ロック部に出力する。
上記第1の位相ロック部および上記第2の位相ロック部は、位相角データ生成部と、位相検出部と、帰還部とを有する。
上記位相角データ生成部は、入力される帰還制御信号に応じた周期で反復されるデータであって、当該周期内の位相角を示すデータを、上記第1のデータもしくは上記第2のデータとして生成する。
上記位相検出部は、上記位相角データ生成部において生成されるデータに応じた位相角を有する位相ロック信号と、上記信号処理部からの入力信号との位相差を検出する。
上記帰還部は、上記位相検出部において検出される位相差が一定値に収束するように帰還制御を働かせる上記帰還制御信号を生成する。
上記第1の位相ロック部では、上記信号処理部から入力される上記第1の信号と上記第1の位相ロック信号との位相差が一定値に収束するように帰還制御が働く。また、上記第2の位相ロック部では、上記信号処理部から入力される上記第2の信号と上記第2の位相ロック信号との位相差が一定値に収束するように帰還制御が働く。そのため、上記位相差演算部において演算される上記第1の位相ロック信号と上記第2の位相ロック信号との位相差は、上記第1の信号と上記第2の信号との位相差に応じた値を持つ。
一方、上記第1の信号は、第1の周波数を有する余弦関数の信号の振幅が第1の角度を有する余弦関数の信号によって変調された第1の角度検出信号と、上記第1の周波数を有する正弦関数の信号の振幅が上記第1の角度を有する正弦関数の信号によって変調された第2の角度検出信号との差である。また、上記第2の信号は、この第1の角度検出信号と第2の角度検出信号との和である。そのため、上記第1の信号と上記第2の信号との間には、上記第1の角度に応じた位相差がある。
従って、上記位相差演算部において演算される上記位相差から、上記第1の角度の情報が取得される。
これにより、上記信号処理部からの入力信号と上記位相ロック信号との乗算結果が得られる。
上記第1の位相角データ生成部は、レゾルバに供給する上記第1の周波数を有する励磁信号の位相角を示す第1のデータを生成する。
上記信号処理部は、上記第1の角度検出信号と上記第2の角度検出信号とに基づいて、上記第1のデータが示す位相角に対して上記第1の角度に応じた位相差を有するとともに上記第1の周波数を有する信号を出力する。
上記位相ロック部は、上記信号処理部の出力信号に位相をロックさせた位相ロック信号を生成し、当該位相ロック信号の位相角を示す第2のデータを出力する。
上記位相差演算部は、上記第1のデータが示す位相角と上記第2のデータが示す位相角との差を演算する。
上記第1の位相角データ生成部において、レゾルバに供給する励磁信号の位相角を示す第1のデータが生成される。上記信号処理部においては、上記第1の角度検出信号と上記第2の角度検出信号とに基づいて、上記第1のデータが示す位相角に対して上記第1の角度に応じた位相差を有するとともに上記第1の周波数を有する信号が出力される。上記位相ロック部では、上記信号処理部の出力信号に位相をロックさせた位相ロック信号が生成され、当該位相ロック信号の位相角を示す第2のデータが出力される。そして、上記位相差演算部において、上記第1のデータが示す位相角と上記第2のデータが示す位相角との差が演算される。
これにより、上記第1のデータが示す上記励磁信号の位相角と上記信号処理部より出力される信号の位相角との差は、上記第1の角度に応じた値を持つ。また、上記信号処理部の出力信号に位相ロックした上記位相ロック信号の位相角と上記信号処理部より出力される信号の位相角との差も、上記第1の角度に応じた値を持つ。従って、上記第1のデータが示す上記励磁信号の位相角と上記第2のデータが示す上記位相ロック信号の位相角との差は、上記第1の角度に応じた値を持つ。すなわち、上記位相差演算部の演算結果の位相差は、上記第1の角度に応じた値を持つ。
上記位相ロック部においては、上記第1の周波数を有する信号に位相がロックされるため、仮に上記第1の角度が周波数ゼロの一定値になる場合でも、上記位相ロック信号は上記第1の周波数を持つように制御される。そのため、上記位相ロック信号の位相角を示す上記第2のデータを出力するために、例えばバイポーラVCOのような周波数ゼロで発振する手段を設ける必要がない。
また、上記信号処理部の出力信号と上記励磁信号との位相差を、ゼロクロス点の時間差により求めるのではなく、上記第1の位相角データ生成部と上記位相ロック部とにおいて刻々に出力される上記第1、第2のデータに基づいて求めるため、上記第1の角度の情報をリアルタイムで取得することが可能になる。また、ゼロクロス点を用いる方法に比べて、外来ノイズの影響を受け難くなる。
上記信号処理部は、上記第1の角度検出信号を実部成分、上記第2の角度検出信号を虚部成分とする複素信号を出力する。
上記位相ロック部は、第2の位相角データ生成部と、複素信号処理部と、帰還部とを有する。
上記第2の位相角データ生成部は、入力される帰還制御信号に応じた周期で反復されるデータであって、当該周期内の位相角を示すデータを上記第2のデータとして生成する。
上記複素信号処理部は、上記信号処理部から入力される第1の複素信号と、上記第2の位相角データ生成部において生成される上記第2のデータに応じた位相角を有し互いに直交する第1信号成分および第2信号成分を含み、周波数が上記第1の複素信号の周波数に対して異なる極性に設定される第2の複素信号と、を乗算した場合に得られる複素信号の偏角に応じた信号を生成する。
上記帰還部は、上記複素信号処理部において生成される信号に応じて、上記偏角が一定値に収束するように帰還制御を働かせる上記帰還制御信号を生成する。
上記位相ロック部の上記第2の複素信号は、先に説明した上記第2の発明における上記第1、第2の位相ロック部と同様に、入力される上記第1の複素信号に含まれる特定の極性(上記所定の極性と反対の極性)の周波数を持つ成分に対して位相をロックさせた信号になる。
一方、上記第1の複素信号は、上記第1の周波数を有する余弦関数の信号の振幅が上記第1の角度を有する余弦関数の信号によって変調された第1の角度検出信号を実部成分とし、上記第1の周波数を有する余弦関数の信号の振幅が上記第1の角度を有する正弦関数の信号によって変調された第2の角度検出信号を虚部成分とする、複素信号である。この複素信号は、上記第1の周波数を持っており、その正の極性を持つ周波数成分が、上記励磁信号に対して上記第1の角度に応じた位相差を有している。また、負の極性を持つ周波数成分も、上記励磁信号に対して上記第1の角度に応じた位相差を有している。
そのため、上記第1の複素信号における一方の極性の周波数成分に対して位相をロックさせた上記第2の複素信号は、上記励磁信号に対して上記第1の角度に応じた位相差を有している。
従って、第1のデータが示す上記励磁信号の位相角と、上記第2のデータが示す上記第2の複素信号の位相角との差を上記位相差演算部において演算することにより、その演算結果から、上記第1の角度の情報を取得することが可能になる。
上記信号処理部は、上記第1の角度検出信号と上記第2の角度検出信号との和もしくは差を上記位相ロック部に出力する。
上記位相ロック部は、第2の位相角データ生成部と、位相検出部と、帰還部とを有する。
上記第2の位相角データ生成部は、入力される帰還制御信号に応じた周期で反復されるデータであって、当該周期内の位相角を示すデータを上記第2のデータとして生成する。
上記位相検出部は、上記第2の位相角データ生成部において生成される上記第2のデータに応じた位相角を有する位相ロック信号と、上記信号処理部からの入力信号との位相差を検出する。
上記帰還部は、上記位相差検出部において検出される位相差が一定値に収束するように帰還制御を働かせる上記帰還制御信号を生成する。
上記位相ロック部では、上記信号処理部からの入力信号と上記位相ロック信号との位相差が一定値に収束するように帰還制御が働く。また、上記位相ロック信号は、上記第2の位相角データ生成部において生成される上記第2のデータに応じた位相角を有する。そのため、上記第2のデータは、上記信号処理部からの入力信号の位相角に応じたデータとなる。
一方、上記信号処理部の出力信号は、第1の周波数を有する余弦関数の信号の振幅が第1の角度を有する余弦関数の信号によって変調された第1の角度検出信号と、上記第1の周波数を有する正弦関数の信号の振幅が上記第1の角度を有する正弦関数の信号によって変調された第2の角度検出信号との和もしくは差である。この和の信号および差の信号は、何れも、上記励磁信号(第1の励磁信号、第2の励磁信号)との間に上記第1の角度に応じた位相差を有する。
そのため、上記第1のデータが示す上記励磁信号の位相角と上記第2のデータが示す上記信号処理部の出力信号の位相角との間には、上記第1の角度に応じた位相差がある。
従って、上記位相差演算部において演算される上記位相差から、上記第1の角度の情報が取得される。
図1は、本発明の第1の実施形態に係る角度検出信号処理装置の構成の一例を示す図である。
第1の実施形態に係る角度検出信号処理装置は、1相励磁2相出力型のレゾルバから出力される式(1)および式(2)に示す角度検出信号
VI=Cosωot・Cosθ(t);
VQ=Cosωot・Sinθ(t);
を入力し、角度θ(t)の情報を取得するものである。なお、以下の説明では、角度検出信号の振幅Voを‘1’として表記を省略する。
信号処理部400は、本発明の信号処理部の一実施形態である。
第1の位相ロック部PLL1は、本発明の第1の位相ロック部の一実施形態である。
第2の位相ロック部PLL2は、本発明の第2の位相ロック部の一実施形態である。
位相差演算部500は、本発明の位相差演算部の一実施形態である。
信号処理部400は、角度検出信号VIおよびVQとに基づいて、周波数ωoを有するとともに角度θ(t)に応じた位相差を有する複素信号_VCPおよび_VCNを出力する。なお、本明細書では、複素信号の記号に下線‘_’を付すことによって複素信号と実信号とを区別する。
後で詳しく述べるように、複素信号_VCPおよび_VCNは、正の周波数(ωo)の成分と負の周波数(−ωo)の成分をそれぞれ有しており、互いに同一極性の周波数成分同士を比較すると、その位相差は角度2×θ(t)になっている。
位相ロック部PLL1は、複素信号_VCPに位相をロックさせた複素信号_VUOを生成し、この複素信号_VUOの位相角に応じたデータPA1を出力する。
位相ロック部PLL2は、複素信号_VCNに位相をロックさせた複素信号_VLOを生成し、この複素信号_VLOの位相角に応じたデータPA2を出力する。
また、位相ロック部PLL2は、位相角データ生成部300−2と、複素信号処理部100−2と、帰還部200−2とを有する。
位相角データ生成部300−1,300−2は、本発明の位相角データ生成部の一実施形態である。
複素信号処理部100−1,100−2は、本発明の複素信号処理部の一実施形態である。
帰還部200−1,200−2は、本発明の帰還部の一実施形態である。
信号生成部301は、本発明の信号生成部の一実施形態である。
カウンタ302は、本発明のカウンタの一実施形態である。
位相角データ生成部300−2も、例えば上述した信号生成部301とカウンタ302とを用いて構成されており、カウンタ302の計数値を位相角のデータPA2として出力する。
103と、複素信号生成部107とを有する。
乗算部101は、本発明の第1の演算部の一実施形態である。
乗算部102は、本発明の第2の演算部の一実施形態である。
加算部103は、本発明の第3の演算部の一実施形態である。
複素信号生成部107は、本発明の複素信号生成部の一実施形態である。
図2は、複素信号生成部107の構成の一例を示す図である。複素信号生成部107は、例えば図2(A)に示すように、排他的論理和回路XORと、アンプA1およびA2を用いて構成することができる。
排他的論理和回路XORは、カウンタ302の計数値の最上位ビットbMSBとその下位ビットbMSB−1との排他的論理和を演算する。
アンプA1は、ビットbMSBが‘1’の場合に正、‘0’の場合に負の極性を持つ正負が同一振幅の矩形状の信号を、信号成分VUO−Qとして出力する。
アンプA2は、ビットbMSB−1が‘1’の場合に正、‘0’の場合に負の極性を持つ正負が同一振幅の信号VUO−Iを出力する。
このような回路によれば、図2(B)に示す論理値のパターンからも分かるように、位相が4分の1周期ずれている矩形信号を生成することができる。
図2(C)の例においては、乗算部101および102にそれぞれスイッチ回路111および極性反転回路112が設けられる。
乗算部101のスイッチ回路111は、ビットbMSB−1が‘1’の場合に角度検出信号VIをそのまま出力し、‘0’の場合には角度検出信号VIを極性反転回路112で極性反転して出力する。
乗算部102のスイッチ回路111は、排他的論理和回路XORの出力が‘1’の場合に角度検出信号VQ(もしくは−VQ)をそのまま出力し、‘0’の場合には角度検出信号VI(もしくは−VQ)を極性反転回路112で極性反転して出力する。
複素信号処理部100−2は、例えば上述と同様な乗算部101および102と、加算部103と、複素信号生成部107とを用いて構成しても良い。この場合、複素信号_VCNと_VLOとを複素乗算した場合に得られる複素信号の虚部成分に相当する信号VLCを生成する。
図3(A)に示す帰還部200−1は、演算増幅器OP1と、抵抗R1およびR2と、キャパシタC1およびC2を有する。
演算増幅器OP1の負側入力端子(−)と出力との間には、抵抗R2およびキャパシタC2の直列回路とキャパシタC1とが並列に接続されており、正側入力端子(+)はグランドに接続される。帰還部200−1の入力信号は、抵抗R1を介して演算増幅器OP1の負側入力端子(−)へ入力さる。帰還部200−1の出力信号は、演算増幅器OP1の出力端子から出力される。
このような構成によると、図3(B)の伝達特性に示すように、周波数が低くなるほど帰還部200−1のゲインは大きくなり、直流では演算増幅器OP1の開ループゲインに応じた非常に大きなゲインとなる。
帰還部200−2についても、例えば複素信号処理部100−1と同様に、直流利得が大きくなる伝達特性を持ったフィルタ回路によって構成することができる。
位相差演算部500は、位相ロック部PLL1およびPLL2より出力される位相角のデータPA1およびPA2に基づいて、複素信号_VUOと複素信号_VLOとの位相差を演算する。
また、複素信号_VCPおよび_VCNの位相差を、ゼロクロス点の時間差により求めるのではなく、位相ロック部PLL1、PLL2において刻々に出力されるデータPA1およびPA2に基づいて求めるため、角度θ(t)の情報をリアルタイムで取得することが可能になる。また、ゼロクロス点を用いる方法に比べて、外来ノイズの影響を受け難くなる。
図4に示すように、複素信号は、原点を角速度ωで回転する複素平面上のベクトルと考えることができる。複素信号の実部は余弦成分、虚部は正弦成分になる。
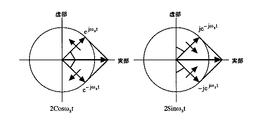
以下では、正弦波および余弦波の実信号を複素信号として見たときに、これらがどのような複素信号として表されるかについて考察する。実信号としての余弦波と正弦波は次式で表すことができる。
実信号2Cosωstは、正の周波数を有する複素信号ejωstと負の周波数を有する複素信号e-jωstとの和である。これを複素平面上に描くと、図5の左図に示すように、互いに逆向きに回転する2つのベクトルの和として表すことができる。2つのベクトルは、時間t=0において実軸上で重なり、時間とともに回転しても実軸に対して常に線対称になる。そのため、2つのベクトルを合成した場合、常に虚部が打ち消されてゼロになり、実部のみが残る。
同様に、実信号2Sinωstは、正の周波数を有する複素信号−jejωstと負の周波数を有する複素信号je-jωstとの和であり、図5の右図に示すように、実軸に対しては常に線対称になるため、やはり2つのベクトルを合成すると虚部は常に打ち消されてゼロになり、実部のみが残る。
図6の座標系では、虚部を表すz軸と実部を表すy軸とがなす複素平面に対して垂直な方向に、複素信号の角周波数または周波数を表すx軸を設ける。
図7は、複素平面(z−y平面)上に、時間t=0のときの正弦波信号および余弦波信号をベクトルで図解した図である。ただし、時間t=0のときの位相は何れもゼロであるとする。図7(A)は余弦波信号Cosωstのベクトルを示し、図7(B)は正弦波信号Sinωstのベクトルを示す。
位相ロック部PLL1およびPLL2は、入力信号を複素信号として扱い、この複素信号の正の周波数成分または負の周波数成分の何れか一方に位相をロックさせた複素信号を生成して、その位相角に応じたデータPA1、PA2を得るものである。
すなわち、複素信号_VUOは、帰還制御信号Vf1に応じた大きさの周波数を有しており、その極性が所定の極性に設定された複素信号である。
Sin(θ(t)−φ(t));
が信号VUCとして出力されるものとする。この場合、図3(B)に示すように帰還部200−1の直流ゲインを非常に大きくすると、定常的には、
VUC=Sin(θ(t)−φ(t))≒0;
が成立するように帰還制御が働く。そのため、角度θ(t)とφ(t)とがほぼ等しくなるように、複素信号_VCPおよび_VUOの位相がロックする。
そして、帰還部200−1では、複素信号処理部100−1において生成された信号VUCに応じて、上記足し合わせた偏角が一定値(例えばゼロ)に収束するように帰還制御を働かせる帰還制御信号Vf1が生成される。その結果、複素信号_VUOの位相が複素信号_VCPの位相にロックする。
これに対し、複素信号_VCPおよび_VUOが同一極性の周波数を持っていると、上記足し合わせた偏角は常に周波数を持ち、これを一定値に収束させることができない。そのため、この場合、帰還制御が働かず、複素信号_VUOの位相は複素信号_VCPに追従しない。
位相差演算部500では、この位相角のデータPA1およびPA2に基づいて、複素信号_VUOおよび_VLOの位相差が演算され、この演算結果より、複素信号_VCPおよび_VCNにおける所定極性の周波数成分同士の位相差に関する情報が取得される。
図8における‘P’および‘N’は、周波数ωoの極性と角度θの極性との関係を表している。すなわち、正の周波数ωoにおいて角度θ(t)が反時計方向に廻るベクトルを正の信号ベクトル(ωot+θ(t))と定義し、時計方向に廻るベクトルを負の信号ベクトル(ωot−θ(t))と定義し、各々‘P’、‘N’の符号を付して示している。また、負の周波数−ωoにおいて角度θ(t)が時計方向に廻るベクトルを正の信号ベクトル(−ωot−θ(t))と定義し、反時計方向に廻るベクトルを負の信号ベクトル(−ωot+θ(t))と定義し、各々‘P’、‘N’の符号を付して示している。
これを言い換えると、周波数ωoと角度θの極性が等しいベクトルを正のベクトル‘P’、周波数ωoと角度θの極性が異なるベクトルを負のベクトル‘N’として表している。
ここで、図8(B)の‘Cosωot×Sinθ(t)’と図8(C)の‘Sinωot×Sinθ(t)’とを、正の周波数に注目して比較すると、‘Cosωot×Sinθ(t)’を時計方向に90°、すなわち−90°回転させることにより、これを‘Sinωot×Sinθ(t)’へ変換できることが分かる。
図10は、上記の演算の様子をベクトルによって図解したものである。
図10の最下段の演算結果を見ると、加算と減算によって得られた2つの複素信号において同一の周波数を持つ成分同士は、互いの位相差が’2×θ’になっていることが分かる。
ここでは、レゾルバの出力信号VIとVQを複素信号として扱う。信号VIおよびVQ自体は実信号なので、虚部成分はゼロである。
次に信号VQを−90°回転させるために、実部と虚部を入れ替え、虚部を反転する。それを複素信号として加減算すると、図10に示す減算出力信号_VCPおよび加算出力信号_VCNが得られる。
以上、複素信号_VCPおよび_VCNの同一極性の周波数成分同士が位相差‘2×θ(t)’を持つ理由について説明した。
式(29)および(30)の第2項目は、周波数2ωoの高周波成分であり、帰還部200−1のフィルタ作用によって減衰する。そのため、何れも第1項の成分
Sin(θ(t)−φ(t));
が帰還制御信号Vf1、Vf2となり、‘θ(t)≒φ(t)’となるように帰還制御が働く。
従来は、構造の簡単な1相励磁2相出力型のレゾルバにおいて、位相角ωot±θ(t)ではなく、検出対象の角度θ(t)に追随するような位相ロックループを構成して角度θ(t)を求めていた。その場合、角度θ(t)は正負の方向に変化したり、静止して直流値になる。そのため、位相ロックループに搭載するVCOは直流値を含め正負の値を表現できるバイポーラ(両極性)型である必要があった。また、カウンタもアップダウンカウントの機能が必要であった。
従って、本実施形態によれば、バイポーラVCOやアップダウン型カウンタなど、構成が複雑で回路が大きく、消費電力も大きい構成を削除することができる。
従来は、VCOからの位相出力φ(t)が角度θ(t)を追随するため、乗算器に入力するコサイン信号Cosφ(t)やサイン信号Sinφ(t)には高い分解能が要求される。例えば12ビットの角度分解能を得るためには、少なくともコサイン信号Cosφ(t)、サイン信号Sinφ(t)に11ビットの分解能が必要である。このことは、レゾルバが静止してコサイン信号Cosφ(t)およびサイン信号Sinφ(t)が一定値(直流)になったとき、直流信号に高い分解能が無い限り、高い角度分解能の位相追随が不可能であることからも直感的に明らかである。このように、従来は正確なコサイン信号Cosφ(t)やサイン信号Sinφ(t)を出力する必要があったために、波形データを格納する大容量のROMや高分解能のD/A変換器、オフセットの少ない乗算型D/A変換器などが必要とされていた。
従って、本実施形態によれば、大容量のROMや高分解能のD/A変換器、乗算型D/A変換器など、構成が複雑で回路が大きく、消費電力も大きい構成を削除することができる。
次に、本発明の第2の実施形態について説明する。
図14は、本発明の第2の実施形態に係る角度検出信号処理装置の構成の一例を示す図である。
また、複素信号処理部100A−1と100A−2は同様な構成を有しているため、以下では複素信号処理部100A−1のみを説明する。
正弦波乗算部104および余弦波乗算部105において乗算される係数の基本波は、互いに直交している。例えば、正弦波乗算部104において乗算される係数の基本波は、カウンタデータPA1の正弦波に対応し、余弦波乗算部105において乗算される係数の基本波は、カウンタデータPA1の余弦波に対応する。
なお、正弦波乗算部104は、本発明の第4の演算部の一実施形態である。
余弦波乗算部105は、本発明の第5の演算部の一実施形態である。
加算部106は、本発明の第6の演算部の一実施形態である。
擬似正弦波を乗ずる場合、例えば、位相角データ生成部300−1において生成されるデータPA1に基づいて、信号成分VUO−Qのk分の1(kは正の4の倍数を示す。以下同じ。)周期ごとの瞬時値に応じた重み係数を、k分の1周期ごとに切り替えて複素信号VCPの実部成分(VI)に掛け合わせる。
また、矩形波を乗ずる場合、例えば、位相角データ生成部300−1において生成されるデータPA1に基づいて、信号成分VUO−Qの半周期ごとのピーク値に応じた重み係数を、半周期ごとに切り替えて複素信号VCPの実部成分(VI)に掛け合わせる。
擬似正弦波を乗ずる場合、例えば、位相角データ生成部300−1において生成されるデータPA1に基づいて、信号成分VUO−Iのk分の1周期ごとの瞬時値に応じた重み係数を、k分の1周期ごとに切り替えて複素信号VCPの虚部成分(VQ)に掛け合わせる。
また、矩形波を乗ずる場合、例えば、位相角データ生成部300−1において生成されるデータPA1に基づいて、信号成分VUO−Iの半周期ごとのピーク値に応じた重み係数を、半周期ごとに切り替えて複素信号VCPの虚部成分(VQ)に掛け合わせる。
図18に示す正弦波乗算部104は、乗算部MP1と、制御部CNT1とを有する。乗算部MP1は、n個の係数乗算回路M1〜Mnと、n個の係数選択スイッチSW1〜SWnと、極性選択スイッチSWpと、極性反転回路INVとを含む。
例えば、位相角データ生成部300−1において生成されるデータPA1のうち、最上位から所定ビット数のデータCB1を用いて、信号成分VUO−Qのk分の1周期ごとの瞬時値に応じた重み係数がk分の1周期ごとに切り替えられるように、係数選択スイッチSW1〜SWn,SWpを制御する。
この場合、重み係数は+a1、−a1、+a2、−a2の4値を有する。
また、重み係数の時系列上の推移を示す波形m0(t)は、図20に図示するように、正弦波状の信号成分(VUO,VLO)をサンプリングして得られる波形になる。乗算回路の重み係数は、例えばこの図20に示すように、重み係数を切り替える時点における信号成分(VUO,VLO)のサンプリング値と等しくなるように選ばれる。
図21に示す乗算部MP1Aは、抵抗R1,…,R6と、係数選択スイッチSW3およびSW4と、極性選択スイッチSW5,…,SW8と、演算増幅器AMP1とを有する。
演算増幅器AMP1の負側出力端子は、出力端子Tout−に接続されるとともに、抵抗R6を介して負側入力端子IN−に接続される。
抵抗R1,R2 … 42.29kΩ;
抵抗R3,R4 … 62.15kΩ;
抵抗R5,R6 … 40kΩ;
逆に、極性選択スイッチSW7およびSW8をオン、極性選択スイッチSW5およびSW6をオフにしたとき、乗算部MP1Aの重み係数の極性は負に設定される。すなわち、出力信号S104は実部成分VIと反対の極性になる。
以上の動作から、スイッチS3〜8の制御は、例えば図22に示すように行われる。
乗算部MP2Aは、図21に示す乗算部MP1Aと同様な構成を有する。
制御部CNT1AおよびCNT2Aは、例えば図22に示すようなスイッチの制御を行うことにより、実部成分VIと信号成分VUO−Qとの乗算、もしくは、虚部成分VQと信号成分VUO−Iとの乗算を実現する。
すなわち、加算回路1061は、乗算部MP1AおよびMP2Aの正側の出力信号同士を加算し、信号VUCの正側の信号として出力する。加算回路1062は、乗算部MP1AおよびMP2Aの負側の出力信号同士を加算し、信号VUCの負側の信号として出力する。
すなわち、重み係数は例えば抵抗値の比によって決定することができるため、よく考慮されたレイアウトを行えば0.1%程度の精度を得ることも可能である。
図21の回路においては、演算増幅器AMP1がオフセット電圧を発生する。仮に信号レベルを2Vとし、オフセット電圧を0.2mVとすれば、信号対オフセット電圧比は80dBとなる。これは、図36のギルバート型に代表される従来のアナログ乗算回路と比較すると2〜3桁程度も小さいオフセットである。0.2mVのオフセットの演算増幅器を実現するには、かなり注意深い回路設計とレイアウトを必要とするが、仮にもう少しオフセットが悪くても12ビットの分解能には間題ない。
角度θ(t)に追随して位相ロック動作が行われると、量子化歪みの影響により全くまともな動作をすることができない。角度θ(t)は軸が静止しているときには直流信号であるため、量子化歪み、即ち高調波歪みが直流の信号に重畳する。また、角度θ(t)がゆっくり動いていると、その周波数成分は非常に低いため、高調波が位相ロックループの帯域内に入ってきてやはり悪影響を与える。それは、図32に示す従来の装置においてコサイン信号Cosφ(t)とサイン信号Sinφ(t)を生成するD/A変換器の分解能が2〜3ビットだったら全く機能しないことを考えると自明なことである。
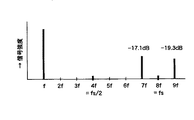
本実施形態では、位相ロック部が周波数ωoだけオフセットをもって動作するため、いかなる動作条件においても高調波が常に位相ロックループの帯域外の高い周波数にしか存在しなくなり、ループに悪影響を与えなくなる。例えば4値の階段波形を持つ疑似正弦波では、最も低い高調波が7次になるため、ほとんどあらゆる場合において高調波の影響を考慮する必要がなくなる。
矩形波を乗ずる場合、例えば図2(C)に示すように、単に入力のアナログ信号の極性を反転する機能だけで乗算回路を具現化することができる。複素周波数において、レゾルバの角度検出信号を複素信号と見なして生成した式(20)および(21)に示した複素信号_VCPおよび_VCNにおいて、複素信号_VCPの周波数成分にのみ注目すると、図24(A)に示されるように正と負に各々‘ωot+θ(t)’と‘ωot−θ(t)’が存在している。この図では位相には注目せず周波数のみを表現している。
θ(t)≒φ(t);
が成立するため、定常値としては2ωotであり、角度θ(t)とは無関係に2つの位相ロック部(PLL1、PLL2)に同じ揺らぎを与える。従って、位相差演算部500においてカウンタの計数値の差を求める際に同相モードとして打ち消しあう。
一方、それほど高い分解能が必要がない場合や、位相ロックループの帯域が狭くてよい場合には、矩形波による乗算回路も可能である。この場合は、回路を大幅に簡易化することができる。
次に、本発明の第3の実施形態について説明する。
図25は、本発明の第3の実施形態に係る角度検出信号処理装置の構成の一例を示す図である。
第3の実施形態に係る角度検出信号処理装置は、2相励磁2相出力型のレゾルバから出力される式(3)および式(4)に示す角度検出信号
VI=Cosωot・Cosθ(t);
VQ=Sinωot・Sinθ(t);
を入力し、角度θ(t)の情報を取得するものである。
信号処理部400Bは、角度検出信号VIおよびVQの差を信号VPとして位相ロック部PLL1Bに出力するとともに、角度検出信号VIおよびVQの和を信号VNとして位相ロック部PLL2Bに出力する。
例えば図25に示すように、信号処理部400Bは、減算部402と加算部403を有している。減算部402は、角度検出信号VIからVQを減算し、その結果を信号VPとして出力する。加算部403は、角度検出信号VIとVQとを加算し、その結果を信号VNとして出力する。
位相ロック部PLL1Bは、信号処理部400Bから出力される信号VPに位相をロックさせた位相ロック信号VUOを生成し、この位相ロック信号VUOの位相角に応じたデータPA1を出力する。
位相ロック部PLL2Bは、信号処理部400Bから出力される信号VNに位相をロックさせた位相ロック信号VLOを生成し、この位相ロック信号VLOの位相角に応じたデータPA2を出力する。
位相ロック部PLL2Bは、位相角データ生成部300−2と、位相検出部600−2と、帰還部200−2とを有する。
なお、図1と図25に示す角度検出信号処理装置の同一符号は同一の構成要素を示すため、それらの説明は割愛する。
また、位相検出部600−1、600−2は、本発明の位相検出部の一実施形態である。
また位相ロック信号生成部601は、サイン/コサインの振幅データをテーブルとして持つROMを用いて位相角のデータを振幅のデータに変換し、それをD/A変換器によってアナログの信号に変換することにより、信号成分VUO−IおよびVUO−Qを生成しても良い。
位相検出部600−2も、例えば上述と同様な位相ロック信号生成部601と乗算部602とを用いて構成されており、位相ロック信号VLOと信号VNとの位相差に応じた信号VLCを生成する。
また、位相ロック信号VUOは位相角のデータPA1、位相ロック信号VLOは位相角のデータPA2に応じた位相角を有しているため、位相ロック信号VUOおよびVLOの間の位相差は、位相角のデータPA1およびPA2に基づいて演算することが可能である。
従って、位相差演算部500では、位相角のデータPA1およびPA2に基づいて、信号VPおよびVNの間の位相差が演算される。
一方、信号VPおよびVNの間の位相差は、式(33)および(34)に示すように、角度2×θ(t)の位相差がある。
従って、位相差演算部500において演算される位相差から、角度θ(t)の情報を得ることができる。
また、位相角‘ωot±θ(t)’を追随するように位相ロック動作が行われることから、振幅に分解能が無くとも位相角には高い分解能を得ることができる。これにより、大容量のROMや高分解能のD/A変換器、乗算型D/A変換器などの構成を不要にすることが可能になる。
次に、本発明の第4の実施形態について説明する。
図26は、本発明の第4の実施形態に係る角度検出信号処理装置の構成の一例を示す図である。
正弦波乗算部700−1、700−2は、本発明の位相検出部の一実施形態である。
すなわち、正弦波乗算部700−1は、1周期を区分する複数の角度範囲の間で、位相角データ生成部300−1のデータPA1が示す位相角が別の角度範囲に移る場合、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での位相ロック信号VUOの瞬時値に応じた重み係数を選択して、該選択した重み係数を信号処理部400Bからの入力信号VPに掛け合わせる。
また、正弦波乗算部700−2は、1周期を区分する複数の角度範囲の間で、位相角データ生成部300−2のデータPA2が示す位相角が別の角度範囲に移る場合、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での位相ロック信号VLOの瞬時値に応じた重み係数を選択して、該選択した重み係数を信号処理部400Bからの入力信号VNに掛け合わせる。
次に、本発明の第5の実施形態について説明する。
図27は、本発明の第5の実施形態に係る角度検出信号処理装置の構成の一例を示す図である。
一方、レゾルバに供給する励磁信号は位相角‘ωot’であり、位相角‘ωot+θ(t)’や‘ωot−θ(t)’に対して位相差が‘θ(t)’になっている。
そこで本実施形態では、レゾルバに供給する励磁信号の位相角を参照して角度θ(t)の情報を取得する。
発振器801は、周波数ωoに対して2n倍の周波数2n・ωoで発振する。
カウンタ802は、nビット長の計数値を出力するカウンタであり、発振器801から出力される周波数2n・ωoの信号を分周して周波数ωoの信号を生成する。カウンタ802の計数値は、励磁信号の位相角のデータPA3として出力される。
例えば図27に示すように、角度検出信号VIを実部成分、角度検出信号VQを虚部成分とした複素信号_VCPを出力する。
従って、位相差演算部500において、データPA1が示す位相角とデータPA3が示す励磁信号VEの位相角との差を演算することにより、角度θ(t)の情報が得られる。
図28に示す角度検出信号処理装置は、図26に示す角度検出信号処理装置における位相ロック部PLL2Cを削除し、信号処理部400Bを信号処理部400Cに変更し、更に、上述した位相角データ生成部800を設けたものである。
例えば図28に示すように、角度検出信号VIからVQを減算した信号VPを出力する。
位相ロック部PLL1Cでは、信号VPの位相角‘ωot+θ(t)’に発振信号の位相をロックさせるため、データPA1が示す位相角は、励磁信号(VEI、VEQ)の位相角‘ωot’に対して角度θ(t)の位相差を有する。
従って、位相差演算部500において、データPA1が示す位相角とデータPA3が示す励磁信号(VEI、VEQ)の位相角との差を演算することにより、角度θ(t)の情報が得られる。
Claims (19)
- 第1の周波数を有する第1の励磁信号の振幅が第1の角度を有する余弦関数の信号によって変調された第1の角度検出信号と、上記第1の周波数を有する第2の励磁信号の振幅が上記第1の角度を有する正弦関数の信号によって変調された第2の角度検出信号とを含んだレゾルバの検出出力に基づいて、上記第1の角度の情報を取得する角度検出信号処理装置であって、
上記第1の角度検出信号と上記第2の角度検出信号とに基づいて、上記第1の周波数を有するとともに上記第1の角度に応じた位相差を有する第1の信号および第2の信号を出力する信号処理部と、
上記第1の信号に位相をロックさせた第1の位相ロック信号を生成し、当該第1の位相ロック信号の位相角を示す第1のデータを出力する第1の位相ロック部と、
上記第2の信号に位相をロックさせた第2の位相ロック信号を生成し、当該第2の位相ロック信号の位相角を示す第2のデータを出力する第2の位相ロック部と、
上記第1のデータと上記第2のデータとに基づいて、上記第1の位相ロック信号と上記第2の位相ロック信号との位相差を演算する位相差演算部と、
を有する角度検出信号処理装置。 - 上記第1の励磁信号および上記第2の励磁信号は、上記第1の周波数を有する余弦関数の信号であり、
上記信号処理部は、上記第1の角度検出信号を実部成分、上記第2の角度検出信号を虚部成分とする複素信号を上記第1の信号として上記第1の位相ロック部に出力するとともに、上記第1の角度検出信号を実部成分、上記第2の角度検出信号の極性を反転させた信号を虚部成分とする複素信号を上記第2の信号として上記第2の位相ロック部に出力し、
上記第1の位相ロック部および上記第2の位相ロック部は、
入力される帰還制御信号に応じた周期で反復されるデータであって、当該周期内の位相角を示すデータを、上記第1のデータもしくは上記第2のデータとして生成する位相角データ生成部と、
上記信号処理部から入力される第1の複素信号と、上記位相角データ生成部において生成されるデータに応じた位相角を有し互いに直交する第1信号成分および第2信号成分を含み、周波数が上記第1の複素信号の周波数に対して異なる極性に設定される第2の複素信号と、を乗算した場合に得られる複素信号の偏角に応じた信号を生成する複素信号処理部と、
上記複素信号処理部において生成される信号に応じて、上記偏角が一定値に収束するように帰還制御を働かせる上記帰還制御信号を生成する帰還部と、
を有する、
請求項1に記載の角度検出信号処理装置。 - 上記位相角データ生成部は、
入力される帰還制御信号に応じた周波数を有する信号を生成する信号生成部と、
上記信号生成部において生成される信号を分周するカウンタと、
を有し、上記カウンタの計数値を上記第1のデータもしくは上記第2のデータとして出力する、
請求項2に記載の角度検出信号処理装置。 - 上記複素信号処理部は、上記偏角に応じた信号として、上記第1の複素信号と上記第2の複素信号とを乗算した場合に得られる複素信号の実部成分または虚部成分に応じた信号を生成し、
上記帰還部は、上記複素演算部において生成される信号が一定値に収束するように帰還制御を働かせる上記帰還制御信号を生成する、
請求項2に記載の角度検出信号処理装置。 - 上記複素信号処理部は、
上記位相角データ生成部において生成されるデータに応じた位相角を有し互いに直交する上記第1信号成分および上記第2信号成分をそれぞれ生成する複素信号生成部と、
上記複素信号生成部において生成される上記第1信号成分と上記第1の複素信号の実部成分とを掛け合わせる第1の演算部と、
上記複素信号生成部において生成される上記第2信号成分と上記第1の複素信号の虚部成分とを掛け合わせる第2の演算部と、
上記第2の演算部および上記第2の演算部の演算結果の和もしくは差を演算する第3の演算部と、
を有する、
請求項4に記載の角度検出信号処理装置。 - 上記複素信号処理部は、
1周期を区分する複数の角度範囲の間で、上記位相角データ生成部のデータが示す位相角が別の角度範囲に移る場合、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での上記第1信号成分の瞬時値に応じた重み係数を選択して、上記第1の複素信号の実部成分に掛け合わせる第4の演算部と、
1周期を区分する複数の角度範囲の間で、上記位相角データ生成部のデータが示す位相角が別の角度範囲に移る場合、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での上記第2信号成分の瞬時値に応じた重み係数を選択して、上記第1の複素信号の虚部成分に掛け合わせる第5の演算部と、
上記第4の演算部および上記第5の演算部の演算結果の和もしくは差を演算する第6の演算部と、
を有する、
請求項4に記載の角度検出信号処理装置。 - 上記第4の演算部は、上記位相角データ生成部において生成されるデータに基づいて、上記第1の信号成分のk分の1(kは正の4の倍数を示す)周期ごとの瞬時値に応じた重み係数を、k分の1周期ごとに切り替えて上記第1の複素信号の実部成分に掛け合わせ、
上記第5の演算部は、上記位相角データ生成部において生成されるデータに基づいて、上記第2の信号成分のk分の1周期ごとの瞬時値に応じた重み係数を、k分の1周期ごとに切り替えて上記第1の複素信号の虚部成分に掛け合わせる、
請求項6に記載の角度検出信号処理装置。 - 上記第4の演算部は、上記位相角データ生成部において生成されるデータに基づいて、上記第1の信号成分の半周期ごとのピーク値に応じた重み係数を、半周期ごとに切り替えて上記第1の複素信号の実部成分に掛け合わせ、
上記第5の演算部は、上記位相角データ生成部において生成されるデータに基づいて、上記第2の信号成分の半周期ごとのピーク値に応じた重み係数を、半周期ごとに切り替えて上記第1の複素信号の虚部成分に掛け合わせる、
請求項6に記載の角度検出信号処理装置。 - 上記第1の励磁信号は上記第1の周波数を有する余弦関数の信号、上記第2の励磁信号は上記第1の周波数を有する正弦関数の信号であり、
上記信号処理部は、上記第1の角度検出信号と上記第2の角度検出信号との差を上記第1の信号として上記第1の位相ロック部に出力するとともに、上記第1の角度検出信号と上記第2の角度検出信号との和を上記第2の信号として上記第2の位相ロック部に出力し、
上記第1の位相ロック部および上記第2の位相ロック部は、
入力される帰還制御信号に応じた周期で反復されるデータであって、当該周期内の位相角を示すデータを、上記第1のデータもしくは上記第2のデータとして生成する位相角データ生成部と、
上記位相角データ生成部において生成されるデータに応じた位相角を有する位相ロック信号と、上記信号処理部からの入力信号との位相差を検出する位相検出部と、
上記位相検出部において検出される位相差が一定値に収束するように帰還制御を働かせる上記帰還制御信号を生成する帰還部と、
を有する、
請求項1に記載の角度検出信号処理装置。 - 上記位相角データ生成部は、
入力される帰還制御信号に応じた周波数を有する信号を生成する信号生成部と、
上記信号生成部において生成される信号を分周するカウンタと、
を有し、上記カウンタの計数値を上記第1のデータもしくは上記第2のデータとして出力する、
請求項9に記載の角度検出信号処理装置。 - 上記位相検出部は、1周期を区分する複数の角度範囲の間で、上記位相角データ生成部のデータが示す位相角が別の角度範囲に移る場合、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での上記位相ロック信号の瞬時値に応じた重み係数を選択して、該選択した重み係数を上記信号処理部からの入力信号に掛け合わせる、
請求項9に記載の角度検出信号処理装置。 - 第1の周波数を有する第1の励磁信号の振幅が第1の角度を有する余弦関数の信号によって変調された第1の角度検出信号と、上記第1の周波数を有する第2の励磁信号の振幅が上記第1の角度を有する正弦関数の信号によって変調された第2の角度検出信号とを含んだレゾルバの検出出力に基づいて、上記第1の角度の情報を取得する角度検出信号処理装置であって、
レゾルバに供給する上記第1の周波数を有する励磁信号の位相角を示す第1のデータを生成する第1の位相角データ生成部と、
上記第1の角度検出信号と上記第2の角度検出信号とに基づいて、上記第1のデータが示す位相角に対して上記第1の角度に応じた位相差を有するとともに上記第1の周波数を有する信号を出力する信号処理部と、
上記信号処理部の出力信号に位相をロックさせた位相ロック信号を生成し、当該位相ロック信号の位相角を示す第2のデータを出力する位相ロック部と、
上記第1のデータが示す位相角と上記第2のデータが示す位相角との差を演算する位相差演算部と、
を有する角度検出信号処理装置。 - 上記第1の励磁信号および上記第2の励磁信号は、上記第1の周波数を有する余弦関数の信号であり、
上記信号処理部は、上記第1の角度検出信号を実部成分、上記第2の角度検出信号を虚部成分とする複素信号を出力し、
上記位相ロック部は、
入力される帰還制御信号に応じた周期で反復されるデータであって、当該周期内の位相角を示すデータを上記第2のデータとして生成する第2の位相角データ生成部と、
上記信号処理部から入力される第1の複素信号と、上記第2の位相角データ生成部において生成される上記第2のデータに応じた位相角を有し互いに直交する第1信号成分および第2信号成分を含み、周波数が上記第1の複素信号の周波数に対して異なる極性に設定される第2の複素信号と、を乗算した場合に得られる複素信号の偏角に応じた信号を生成する複素信号処理部と、
上記複素信号処理部において生成される信号に応じて、上記偏角が一定値に収束するように帰還制御を働かせる上記帰還制御信号を生成する帰還部と、
を有する、
請求項12に記載の角度検出信号処理装置。 - 上記第2の位相角データ生成部は、
入力される帰還制御信号に応じた周波数を有する信号を生成する信号生成部と、
上記信号生成部において生成される信号を分周するカウンタと、
を有し、上記カウンタの計数値を上記第2のデータとして出力する、
請求項13に記載の角度検出信号処理装置。 - 上記複素信号処理部は、上記偏角に応じた信号として、上記第1の複素信号と上記第2の複素信号とを乗算した場合に得られる複素信号の実部成分または虚部成分に応じた信号を生成し、
上記帰還部は、上記複素演算部において生成される信号が一定値に収束するように帰還制御を働かせる上記帰還制御信号を生成する、
請求項13に記載の角度検出信号処理装置。 - 上記複素信号処理部は、
1周期を区分する複数の角度範囲の間で、上記第2の位相角データ生成部のデータが示す位相角が別の角度範囲に移る場合、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での上記第1信号成分の瞬時値に応じた重み係数を選択して、上記第1の複素信号の実部成分に掛け合わせる第4の演算部と、
1周期を区分する複数の角度範囲の間で、上記第2の位相角データ生成部のデータが示す位相角が別の角度範囲に移る場合、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での上記第2信号成分の瞬時値に応じた重み係数を選択して、上記第1の複素信号の虚部成分に掛け合わせる第5の演算部と、
上記第4の演算部および上記第5の演算部の演算結果の和もしくは差を演算する第6の演算部と、
を有する、
請求項15に記載の角度検出信号処理装置。 - 上記第1の励磁信号は上記第1の周波数を有する余弦関数の信号、上記第2の励磁信号は上記第1の周波数を有する正弦関数の信号であり、
上記信号処理部は、上記第1の角度検出信号と上記第2の角度検出信号との和もしくは差を上記位相ロック部に出力し、
上記位相ロック部は、
入力される帰還制御信号に応じた周期で反復されるデータであって、当該周期内の位相角を示すデータを上記第2のデータとして生成する第2の位相角データ生成部と、
上記第2の位相角データ生成部において生成される上記第2のデータに応じた位相角を有する位相ロック信号と、上記信号処理部からの入力信号との位相差を検出する位相検出部と、
上記位相検出部において検出される位相差が一定値に収束するように帰還制御を働かせる上記帰還制御信号を生成する帰還部と、
を有する、
請求項12に記載の角度検出信号処理装置。 - 上記第2の位相角データ生成部は、
入力される帰還制御信号に応じた周波数を有する信号を生成する信号生成部と、
上記信号生成部において生成される信号を分周するカウンタと、
を有し、上記カウンタの計数値を上記第2のデータとして出力する、
請求項17に記載の角度検出信号処理装置。 - 上記位相検出部は、1周期を区分する複数の角度範囲の間で、上記第2の位相角データ生成部のデータが示す位相角が別の角度範囲に移る場合、複数の重み係数の中から、当該移動先の角度範囲における所定の位相角での上記位相ロック信号の瞬時値に応じた重み係数を選択して、該選択した重み係数を上記信号処理部からの入力信号に掛け合わせる、
請求項17に記載の角度検出信号処理装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004242664A JP4294558B2 (ja) | 2004-08-23 | 2004-08-23 | 角度検出信号処理装置 |
| US11/205,079 US7123175B2 (en) | 2004-08-23 | 2005-08-17 | Angle detection apparatus computing phase differences between first and second phase angles |
| KR1020050075917A KR20060053120A (ko) | 2004-08-23 | 2005-08-18 | 각도검출 신호처리장치 |
| CNB2005100921731A CN100422690C (zh) | 2004-08-23 | 2005-08-22 | 角度检测信号处理装置 |
| EP05291772.1A EP1630526A3 (en) | 2004-08-23 | 2005-08-23 | Resolver signal processing system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004242664A JP4294558B2 (ja) | 2004-08-23 | 2004-08-23 | 角度検出信号処理装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006058232A JP2006058232A (ja) | 2006-03-02 |
| JP2006058232A5 JP2006058232A5 (ja) | 2007-09-20 |
| JP4294558B2 true JP4294558B2 (ja) | 2009-07-15 |
Family
ID=35457234
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004242664A Expired - Fee Related JP4294558B2 (ja) | 2004-08-23 | 2004-08-23 | 角度検出信号処理装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7123175B2 (ja) |
| EP (1) | EP1630526A3 (ja) |
| JP (1) | JP4294558B2 (ja) |
| KR (1) | KR20060053120A (ja) |
| CN (1) | CN100422690C (ja) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4155588B2 (ja) * | 2006-05-31 | 2008-09-24 | 株式会社東芝 | デジタル/アナログ変換器および送信機 |
| CA3156115A1 (en) * | 2007-01-19 | 2008-07-24 | Sunnybrook Research Institute | Imaging probe with combined ultrasound and optical means of imaging |
| US8460195B2 (en) * | 2007-01-19 | 2013-06-11 | Sunnybrook Health Sciences Centre | Scanning mechanisms for imaging probe |
| US8428175B2 (en) * | 2007-03-09 | 2013-04-23 | Qualcomm Incorporated | Quadrature modulation rotating training sequence |
| US8064550B2 (en) | 2007-03-09 | 2011-11-22 | Qualcomm, Incorporated | Quadrature imbalance estimation using unbiased training sequences |
| FI121202B (fi) * | 2007-03-14 | 2010-08-13 | Kone Corp | Laitteisto ja menetelmä kulman määrittämiseksi resolverilla |
| US7863850B2 (en) * | 2007-05-11 | 2011-01-04 | GM Global Technology Operations LLC | Apparatus, system, and method for simulating outputs of a resolver to test motor-resolver systems |
| US7834576B2 (en) * | 2007-05-14 | 2010-11-16 | Gm Global Technology Operations, Inc. | Apparatus and methods for diagnosing motor-resolver system faults |
| JP4949943B2 (ja) * | 2007-06-18 | 2012-06-13 | 愛三工業株式会社 | レゾルバ |
| JP4476321B2 (ja) | 2007-12-21 | 2010-06-09 | 日本航空電子工業株式会社 | Rdコンバータ及び角度検出装置 |
| JP2009254780A (ja) * | 2008-03-26 | 2009-11-05 | Fujifilm Corp | 超音波診断装置 |
| US8384570B2 (en) * | 2009-05-27 | 2013-02-26 | Active Precision, Inc. | Encoder interpolator with enhanced precision |
| JP5341714B2 (ja) * | 2009-06-15 | 2013-11-13 | 愛三工業株式会社 | 位相差式レゾルバ |
| JP4780223B2 (ja) * | 2009-08-06 | 2011-09-28 | 株式会社デンソー | 車両の走行用モータ制御装置 |
| US8188896B2 (en) * | 2009-10-20 | 2012-05-29 | Kabushiki Kaisha Toshiba | Digital converter for processing resolver signal |
| JP5115610B2 (ja) * | 2010-09-23 | 2013-01-09 | 株式会社デンソー | 回転角検出装置、および、これを用いた電動パワーステアリング装置 |
| JP2012159396A (ja) | 2011-02-01 | 2012-08-23 | Toshiba Corp | 角度検出装置 |
| GB201110039D0 (en) * | 2011-06-15 | 2011-07-27 | Trw Ltd | Measurement of motor rotor position or speed |
| CN102620755A (zh) * | 2011-10-14 | 2012-08-01 | 南京航空航天大学 | 基于tdc计时器的高精度位置信号检测方法和装置 |
| RU2541856C2 (ru) * | 2013-06-28 | 2015-02-20 | Открытое Акционерное общество "Ростовский оптико-механический завод" | Цифровой преобразователь угла |
| JP6107557B2 (ja) | 2013-09-12 | 2017-04-05 | 株式会社ソシオネクスト | 角度検出装置および角度検出方法 |
| FR3016849B1 (fr) * | 2014-01-30 | 2016-02-19 | Jtekt Europe Sas | Determination d'une position de reference angulaire de direction assistee a partir de fronts montants et descendants d'un signal d'index |
| DE102014015126A1 (de) * | 2014-10-14 | 2016-04-14 | Sonovum AG | Phasendetektionsverfahren basierend auf einer Empfangssequenz abgetasteter Werte |
| DE102015211260A1 (de) * | 2015-06-18 | 2016-12-22 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Bestimmung eines Sensorsignals |
| CN105171778B (zh) * | 2015-10-13 | 2017-01-18 | 西安交通大学 | 一种工业机器人关节减速器扭振提取与分析方法 |
| JP6732237B2 (ja) * | 2016-10-19 | 2020-07-29 | 多摩川精機株式会社 | アナログ信号をディジタル信号に変換する方法および装置 |
| JP6732238B2 (ja) * | 2016-10-19 | 2020-07-29 | 多摩川精機株式会社 | アナログ信号をディジタル信号に変換する方法および装置 |
| CN107092678B (zh) * | 2017-04-20 | 2023-11-17 | 腾讯科技(深圳)有限公司 | 一种获取应用活跃程度的方法、装置及设备 |
| JP7251751B2 (ja) * | 2017-11-07 | 2023-04-04 | 株式会社松尾製作所 | 電気角取得システム、電気角取得方法、電気角取得プログラム、電気角取得特性測定システム、電気角取得特性測定方法および電気角取得特性測定プログラム |
| US11209290B2 (en) | 2018-07-09 | 2021-12-28 | Hamilton Sundstrand Corporation | Resolver/LVDT odd harmonic distortion compensation |
| EP3699554B1 (en) * | 2019-02-19 | 2021-07-28 | Integrated Device Technology, Inc. | Position sensor system, particularly for detecting rotary movement and method for detecting errors in a position sensor system |
| CN111135482B (zh) * | 2020-01-22 | 2021-09-07 | 哈尔滨理工大学 | 一种胸腹表面呼吸运动信号准相位超分辨方法 |
| US11353337B2 (en) | 2020-11-03 | 2022-06-07 | Semiconductor Components Industries, Llc | Offset cancel systems and methods for resolver-type sensors |
| EP4341645A1 (en) * | 2021-08-23 | 2024-03-27 | Parker-Hannifin Corporation | Systems and methods for a resolver and motor control with enhanced speed and direction monitoring |
| CN114370814A (zh) * | 2022-01-10 | 2022-04-19 | 泉州昆泰芯微电子科技有限公司 | 角度提取电路、方法及芯片 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3579268A (en) * | 1968-07-09 | 1971-05-18 | Ampex | Automatic quadrature and amplitude stabilizer |
| US3800228A (en) * | 1972-02-23 | 1974-03-26 | Honeywell Inf Systems | Phase jitter compensator |
| US4204257A (en) * | 1978-11-28 | 1980-05-20 | The Bendix Corporation | Numerical control resolver position measuring device |
| CA1250925A (en) * | 1983-03-24 | 1989-03-07 | Toshiba Kikai Kabushiki Kaisha | Phase modulation type digital position detector |
| JPS62171100A (ja) * | 1986-01-23 | 1987-07-28 | 株式会社安川電機 | レゾルバ制御方法 |
| FR2596223A1 (fr) * | 1986-03-21 | 1987-09-25 | Renault | Dispositif d'elaboration d'une information numerique de position sous forme incrementale a partir d'un capteur de position inductif |
| US4857926A (en) * | 1987-08-25 | 1989-08-15 | Honeywell Inc. | Phase-responsive angular tracking device |
| US4972186A (en) * | 1989-03-20 | 1990-11-20 | Allen-Bradley Company, Inc. | Resolver excitation circuit |
| US4989001A (en) * | 1989-04-20 | 1991-01-29 | Advanced Micro Controls, Inc. | Microcontroller based resolver-to-digital converter |
| JP3137370B2 (ja) * | 1991-08-07 | 2001-02-19 | 株式会社東芝 | デジタルpll回路 |
| JP3376167B2 (ja) | 1995-06-07 | 2003-02-10 | 多摩川精機株式会社 | ディジタル角度検出方法 |
| MY120887A (en) * | 1995-06-08 | 2005-12-30 | Sony Corp | Rotation position detecting device and motor device. |
| JP3098732B2 (ja) | 1997-09-11 | 2000-10-16 | 多摩川精機株式会社 | ディジタル角度変換方法 |
| JP3368837B2 (ja) * | 1998-08-05 | 2003-01-20 | トヨタ自動車株式会社 | レゾルバ信号処理装置 |
| US6104328A (en) * | 1998-11-27 | 2000-08-15 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Resolver to 360° linear analog converter and method |
| JP3442316B2 (ja) | 1999-06-11 | 2003-09-02 | 多摩川精機株式会社 | アナログ信号のディジタル変換方法 |
| JP2004045286A (ja) * | 2002-07-12 | 2004-02-12 | Denso Corp | レゾルバ補正方法 |
| JP4521258B2 (ja) * | 2004-01-28 | 2010-08-11 | 日立オートモティブシステムズ株式会社 | レゾルバ/デジタル変換器及びこれを用いた制御システム |
-
2004
- 2004-08-23 JP JP2004242664A patent/JP4294558B2/ja not_active Expired - Fee Related
-
2005
- 2005-08-17 US US11/205,079 patent/US7123175B2/en not_active Expired - Fee Related
- 2005-08-18 KR KR1020050075917A patent/KR20060053120A/ko not_active Application Discontinuation
- 2005-08-22 CN CNB2005100921731A patent/CN100422690C/zh not_active Expired - Fee Related
- 2005-08-23 EP EP05291772.1A patent/EP1630526A3/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| US7123175B2 (en) | 2006-10-17 |
| JP2006058232A (ja) | 2006-03-02 |
| EP1630526A3 (en) | 2014-03-26 |
| CN100422690C (zh) | 2008-10-01 |
| KR20060053120A (ko) | 2006-05-19 |
| EP1630526A2 (en) | 2006-03-01 |
| US20060132338A1 (en) | 2006-06-22 |
| CN1740751A (zh) | 2006-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4294558B2 (ja) | 角度検出信号処理装置 | |
| US4991429A (en) | Torque angle and peak current detector for synchronous motors | |
| JPH01164298A (ja) | 可変磁気抵抗トランスジューサ | |
| JP2558159B2 (ja) | 二相信号発生装置及び二相信号発生方法 | |
| JP2001235307A (ja) | 回転型位置検出装置 | |
| US6552666B1 (en) | Phase difference detection device and method for a position detector | |
| JP2013152251A (ja) | 回転型位置検出装置 | |
| JP4708070B2 (ja) | 角度検出信号処理装置 | |
| JP6205683B2 (ja) | 回転角度検出装置、画像処理装置及び回転角度検出方法 | |
| JP2018205166A (ja) | アナログ信号のディジタル変換方法 | |
| JP2000337924A (ja) | R/dコンバータ | |
| JPH11118521A (ja) | Vr形レゾルバ及びレゾルバ信号処理回路 | |
| JP2004104954A (ja) | モータの回転制御方式、回転制御装置および回転制御方法 | |
| JP3760191B2 (ja) | 球体センサ | |
| JP2005348208A (ja) | 位相ロック回路 | |
| JP4048207B2 (ja) | 位置検出装置 | |
| CN114061632B (zh) | 一种用于补偿指定次谐波的高精度磁编码器解码方法 | |
| JP5767917B2 (ja) | エンコーダ装置及びエンコーダ装置のための補正方法 | |
| JP2004053535A (ja) | 回転体の回転速度検出方式および方法、回転制御装置ならびに画像形成装置 | |
| JP3733397B2 (ja) | 多方向傾斜検出装置 | |
| JPH0356818A (ja) | 回転角度検出装置 | |
| JPH07181060A (ja) | アブソリュートエンコーダ | |
| Cai et al. | A synthetic position decoding technology for rotary transformers based rotor position measurement system | |
| JP5237210B2 (ja) | 位置検出装置 | |
| JP2002162255A (ja) | レゾルバ/デジタル変換装置および変換方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070803 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070803 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090113 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090331 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090408 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120417 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120417 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130417 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130417 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140417 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |