JP3733397B2 - 多方向傾斜検出装置 - Google Patents
多方向傾斜検出装置 Download PDFInfo
- Publication number
- JP3733397B2 JP3733397B2 JP28331996A JP28331996A JP3733397B2 JP 3733397 B2 JP3733397 B2 JP 3733397B2 JP 28331996 A JP28331996 A JP 28331996A JP 28331996 A JP28331996 A JP 28331996A JP 3733397 B2 JP3733397 B2 JP 3733397B2
- Authority
- JP
- Japan
- Prior art keywords
- output
- coil
- signal
- phase
- storage space
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000001514 detection method Methods 0.000 claims description 154
- 230000004044 response Effects 0.000 claims description 61
- 230000008859 change Effects 0.000 claims description 29
- 239000012530 fluid Substances 0.000 claims description 10
- 230000005484 gravity Effects 0.000 claims description 4
- 230000005389 magnetism Effects 0.000 claims 1
- 230000002194 synthesizing effect Effects 0.000 claims 1
- 230000010363 phase shift Effects 0.000 description 18
- 238000004364 calculation method Methods 0.000 description 17
- 238000010586 diagram Methods 0.000 description 15
- 238000005259 measurement Methods 0.000 description 10
- 238000000034 method Methods 0.000 description 9
- 238000012545 processing Methods 0.000 description 9
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 8
- 230000001939 inductive effect Effects 0.000 description 8
- 238000004804 winding Methods 0.000 description 7
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000013461 design Methods 0.000 description 4
- 230000005284 excitation Effects 0.000 description 4
- 230000006698 induction Effects 0.000 description 4
- 230000003111 delayed effect Effects 0.000 description 3
- 229910052742 iron Inorganic materials 0.000 description 3
- 239000006247 magnetic powder Substances 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 239000012141 concentrate Substances 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 239000011553 magnetic fluid Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 239000004576 sand Substances 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000012938 design process Methods 0.000 description 1
- 230000009969 flowable effect Effects 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 239000008187 granular material Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
Images











Landscapes
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Description
【発明の属する技術分野】
本発明は、多方向傾斜検出装置に関し、建設機械、自動車、工作機械、その他あらゆる分野で応用可能なものである。
【0002】
【従来の技術】
従来の傾斜検出装置にはポテンショメータを用いたものがある。しかし、ポテンショメータにおいて摺動接触子があるために耐久性の点で難があった。
また、従来知られた誘導型位置検出装置には、直線位置検出装置としては差動トランスがあり、回転位置検出装置としてはレゾルバがある。差動トランスは、1つの1次巻線を1相で励磁し、差動接続された2つの2次巻線の各配置位置において検出対象位置に連動する鉄心コアの直線位置に応じて差動的に変化するリラクタンスを生ぜしめ、その結果として得られる1相の誘導出力交流信号の電圧振幅レベルが鉄心コアの直線位置を示すようにしたものである。レゾルバは、複数の1次巻線を1相で励磁し、サイン相取り出し用の2次巻線からサイン相の振幅関数特性を示す出力交流信号を取り出し、コサイン相取り出し用の2次巻線からコサイン相の振幅関数特性を示す出力交流信号を取り出すようにしたものである。この2相のレゾルバ出力は公知のR/Dコンバータといわれる変換回路を用いて処理し、検出した回転位置に対応する位相値をディジタル的に測定することができる。
また、サイン相とコサイン相のような複数相の交流信号によって複数の1次巻線を夫々励磁し、検出対象直線位置又は回転位置に応じて該交流信号を電気的に位相シフトした出力交流信号を出力し、この出力交流信号の電気的位相シフト量を測定することにより、検出対象直線位置又は回転位置をディジタル的に測定する技術も知られている(例えば、特開昭49−107758号、特開昭53−106065号、特開昭55−13891号、実公平1−25286号など)。
【0003】
【発明が解決しようとする課題】
しかし、傾斜検出装置として従来知られたポテンショメータは、前述の通り、摺動接触子があるために耐久性の点で難があった。また、劣悪な環境で使用するには適していないものであった。
また、従来知られた誘導型位置検出装置は、回転位置または直線位置を検出するものであり、傾斜を検出することのできるような構造を持っていなかった。一般に、誘導型位置検出装置は、構造的に非接触であり、また、コイルと磁性体(鉄片等)の簡単な構成により、簡便かつ安価に製造することができ、かつ劣悪な環境下での使用にも耐えうるので、これを傾斜検出装置に適用できれば、広い応用・用途が見込まれる。
また、従来の傾斜検出装置は、一方向のみの傾斜検出だけが可能であり、多方向の傾斜を検出するには、多数の傾斜検出装置を組み合わせなければならなかった。
本発明は上述の点に鑑みてなされたもので、1つの装置で多方向の傾斜検出が可能な新規な誘導型の多方向傾斜検出装置を提供しようとするものである。
【0004】
【課題を解決するための手段】
本発明に係る多方向傾斜検出装置は、リング状の収納空間を有する収納体であって、該収納空間のリングが検出対象面に平行となるように該検出対象面に設置されるものと、前記収納空間内にて重力に従って移動自在に収納された流動性の磁気応答部材と、前記収納体において前記収納空間に対応して配置されたコイル部とを具え、前記検出対象面の任意の方向の傾きに応じて前記磁気応答部材が前記リング状の収納空間を移動し、該収納空間における前記磁気応答部材の分布に応答する出力信号を前記コイル部から生成し、これにより前記傾きを検出する多方向傾斜検出装置であって、 前記コイル部は、前記収納空間のリングに沿って等間隔で配置された4つのコイルを含み、そのうち、リング中心に対して180度反対側に隔てられている2つのコイルにより第1のコイルグループを構成し、別の180度反対側に隔てられている2つのコイルにより第2のコイルグループを構成し、各コイルを所定の交流信号で励磁し、各コイルグループ内の2つのコイルの出力を差動合成して各グループ毎の出力交流信号をそれぞれ生成し、これにより、前記リング状の収納空間を移動する前記磁気応答部材の相対的位置に応じて、前記第1のコイルグループは、X軸座標又はサイン相の振幅関数特性を示す第1の出力交流信号を生じ、また、前記第2のコイルグループは、Y軸座標又はコサイン相の振幅関数特性を示す第2の出力交流信号を生じ、更に、各コイルグループにおける各コイルは前記交流信号によって励磁される1次コイルのみからなり、該各1次コイルに対する前記磁気応答部材の位置に応じたインダクタンス変化に基づく振幅変化を示す出力電圧信号を該各1次コイルから取り出し、これに基づき前記第1及び第2のコイルグループから前記第1の出力交流信号と前記第2の出力交流信号がそれぞれ生成され、更に、前記第1及び第2の出力交流信号に基づき前記リング中心を中心とする極座標の偏角成分を求めると共に、該第1及び第2の出力交流信号又は前記各1次コイルの出力電圧信号に基づき該極座標の動径成分を求める手段を具備し、該偏角成分と動径成分により前記検出対象面の傾斜の方向と角度に応じた情報を得ることで、多方向傾斜を検出することを特徴とするものである。
本発明において、流動性の磁気応答部材としては、例えば磁性流体や磁性粉体あるいは砂鉄のような粒体などを使用することができる。検出対象面が水平のときは、リング状の収納空間において磁気応答部材が均等に分布する。検出対象面が任意の方向に傾くと、その方向に偏って磁気応答部材が分布する。従って、該収納空間における磁気応答部材の分布をコイル部によって検出することにより、傾きの方向を検出することができる。また、その傾きが大きいほど磁気応答部材が集中するので、磁気結合度が増大し、出力レベルが増加する。従って、傾斜角度も検出可能である。なお、検出対象面とは、実際の面である必要はなく、検出対象における仮想的な面のことである。
収納体の収納空間は、凸曲面又は凹曲面状のような曲面状であってもよい。凸曲面の場合は、検出対象面が水平のときは、磁気応答部材は凸曲面状収納空間の最も低い箇所である外周縁部分に沿ってリング状に均等に分布する。検出対象面が任意の方向に傾くと、その方向に偏って磁気応答部材が分布する。凹曲面の場合は、検出対象面が水平のときは、磁気応答部材は凹曲面状収納空間の最も低い箇所である中央部分に集中して分布する。検出対象面が任意の方向に傾くと、その方向に偏って磁気応答部材が分布する。従って、上記と同様に、コイル部の出力信号を基にして傾斜の方向と角度を検出することができる。
本発明によれば、各コイルグループにおける各コイルは前記交流信号によって励磁される1次コイルのみからなり、該各1次コイルに対する前記磁気応答部材の位置に応じたインダクタンス変化に基づく振幅変化を示す出力電圧信号を該各1次コイルから取り出すようにし、これに基づき前記第1及び第2のコイルグループから前記サイン相の振幅関数特性を示す出力交流信号と前記コサイン相の振幅関数特性を示す出力交流信号がそれぞれ生成されるようにしたことにより、コイル構成の簡略化によって検出装置を小型化することができる。
【0005】
【発明の実施の形態】
以下、添付図面を参照して本発明の実施の形態をいくつかの代表例について説明する。図示された各例は、相互に組み合わせることも可能であり、それらの組合せも本発明の実施に含まれる。
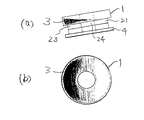
図1は本発明に係る多方向傾斜検出装置10の基本的構成例を示す図であり、(a)は全体の側面略図、(b)は収納体1の概略斜視図、(c)は収納体1の断面図、(d)はコイル部2におけるコイル配置例を略示する平面図、である。図1(b),(c)に示されるように、収納体1は、リング状の収納空間1aを有しており、このリング状の収納空間1a内に適量の流動性の磁気応答部材3が収納されている。磁気応答部材3としては、例えば磁性流体あるいは磁性粉体を使用する。磁性粉体としては、微粒粉に限らず、砂鉄のようなものであってもよい。図1(c)は、水平に置かれている状態の収納体1の断面略図であり、その場合、流動性の磁気応答部材3はリング状の収納空間1a内に均等に分布している。勿論、収納体1は、非磁性体からなる。4は、取付けベースである。
【0006】
図1(a)に示されるように、収納体1の下側にコイル部2が設けられる。コイル部2は、収納空間1a内における磁気応答部材3の分布を検出し得るような適宜のコイル配置からなる。例えば、図1(d)の例では、リング状の収納空間1aの円周方向に沿って等間隔(90度間隔)で4つの極を構成するようにコイル21〜24が設けられている。例えば、コイル21〜24は2次コイルであって、この各2次コイル21〜24に対応して各極ごとに1次コイル11〜14を設けてもよい。
1次コイル11〜14を適宜の交流信号で励磁すると、夫々に対応する2次コイル21〜24からは夫々の誘導結合度若しくは磁気結合度に応じたレベルの交流信号が誘導される。この誘導結合若しくは磁気結合は、磁気応答部材3の存在によって可変制御される。
上記構成からなる多方向傾斜検出装置10が、検出対象における適宜の位置に取り付けられる。検出対象の面としての傾きを全方向について検出しうるようにするためには、収納空間1aのリングが検出対象面に平行となるように設置する。すなわち、円形リングの径方向が検出対象面に平行となるように設置する。なお、ここで、検出対象面とは実際に面を成している必要はなく、仮想的な面であってよい。すなわち、この多方向傾斜検出装置10は、検出対象面の四方・八方、全方向についての傾斜を検出することができる。
【0007】
収納体1が水平に置かれている場合(つまり、検出対象面が傾斜0のとき)は、流動性の磁気応答部材3はリング状の収納空間1a内に均等に分布しているので、どの2次コイル21〜24からも同じレベルの出力信号が得られる。従って、どの2次コイル21〜24からも同じレベルの出力信号が得られることに基づき、傾斜0であることが検出できる。
収納体1が任意の方向に傾斜すると(つまり、検出対象面が任意の方向に傾斜すると)、流動性の磁気応答部材3が重力に従って収納空間1a内を動き、該収納空間1a内における磁気応答部材3の分布に偏りが生じる。例えば、図2は、収納体1が傾斜した状態の一例を示す略図であり、(a)は側面図、(b)は平面図である。この場合、コイル23の方向に傾いており、2次コイル23の位置に対応して最も多量の磁気応答部材3が集まっている。2次コイル22,24の位置に対応している磁気応答部材3の量は僅かであり、2次コイル21の位置に対応している磁気応答部材3の量は0である。このように、収納空間1a内における磁気応答部材3の分布に応答する出力信号をコイル部2から得ることができ、これに基づき、傾斜の方向を検出することができ、また傾斜の大きさ(傾斜角)を検出することができる。
【0008】
収納空間1a内における磁気応答部材3の分布を検出するための採用するコイル部2の構成は、なんらかの形で磁気応答部材3の分布を検出することができるものでありさえすれば、どのような構成でもよい。
例えば、図1(d)に示すような円周状のコイル(極)配置の中心Oを原点0とするX,Y座標を想定し、このX,Y座標によって傾斜の方向を全方向的に表わすことができる。例えば、コイル21と23がX軸に対応しており、コイル22と24がY軸に対応しているとすると、コイル21はプラスX方向、コイル22はプラスY方向、コイル23はマイナスX方向、コイル24はマイナスY方向、に位置していることになる。そこで、2次コイル21が配置された極をプラスX極(図でx)、2次コイル22が配置された極をプラスY極(図でy)、2次コイル23が配置された極をマイナスX極(図で/x)、2次コイル24が配置された極をマイナスY極(図で/y)、と表わすことにする。
なお、明細書中では、表記の都合上、反転を示すバー記号は「/(スラッシュ)」で記載するが、これは、図中のバー記号に対応している。
【0009】
同じ軸のプラス極とマイナス極のコイル出力信号はその差を求めることにより、該軸についての座標値を求めることができる。例えば、2次コイル22と24の出力振幅レベルが同じである場合は、Y軸座標値は0であり、Y軸方向の傾斜成分が0であることを示す。
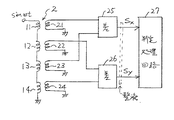
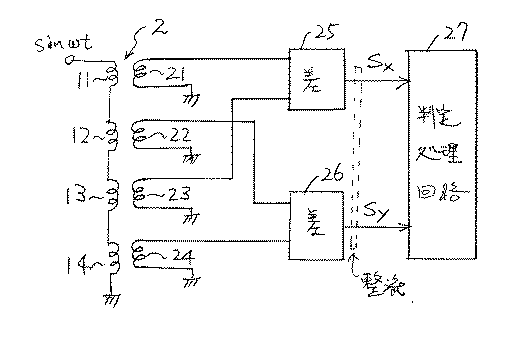
従って、コイル部2における各コイルに関連する回路例を示すと、図3のようになる。すなわち、すべての1次コイル11〜14を共通の交流信号(例えばsinωtと略記する)で励磁し、X軸に沿う各2次コイル21,23の出力信号の差を差分回路25で求め(差動接続でもよい)、その差信号としてX軸座標検出信号Sxを得るようにする。また、Y軸に沿う2次コイル22,24の出力信号の差を差分回路26で求め(差動接続でもよい)、その差信号としてY軸座標検出信号Syを得るようにする。このようにして求めたX,Y座標値の信号Sx,Syから座標の象限と極座標が判明するので、これらの信号Sx,Syを判定処理回路27で適宜処理することにより、傾斜の方向と大きさ(傾斜角)を検出することができる。なお、差分回路25,26の入力側又は出力側のどちらかに整流回路を設け、X,Y座標値を示す出力信号Sx,Syは、直流的な電圧レベル値とする。この電圧レベル値は、アナログ値のままである必要はなく、適宜ディジタル変換してもよい。従って、判定処理回路27はアナログ演算回路であってもよいし、あるいはディジタル回路であってもよい。
【0010】
概ね、極座標の偏角θが傾斜の方向に対応し、動径ρが傾斜の大きさ(傾斜角)に対応するので、判定処理回路27では、例えば下記式のような公知の直交座標−極座標変換公式を用いて、X,Y座標値の信号Sx,Syから極座標の偏角θと動径ρを求め、これに基づき傾斜の方向と大きさ(傾斜角)を検出するデータを得るようにすることができる。下記式において、x,yは、信号Sx,Syが示すX,Y座標値である。
【数1】
なお、厳密な極座標変換公式に限らず、おおまかな傾斜方向の判定は信号Sx,Syから座標の象限等を判定する簡単なテーブルを用いることによっても行える。また、おおまかな傾斜の大きさ(傾斜角)は、差信号(Sx,Sy)を使用せずに、個別の各コイル21〜24の出力レベルに基づき判定するようにしてもよい。例えば、各コイル21〜24の出力信号レベルのうち最大レベルのコイルの出力電圧値に基づき傾斜角度を判定する。その場合、傾斜方向判定結果を考慮して適宜の修正演算を行なうとよい。
その他、コイル部2の出力信号に基づく具体的な傾斜方向と傾斜量の判定の仕方は、設計上適宜の構成を採用してよい。
【0012】
別の例として、コイル部2を回転型のレゾルバと見立てて、90度間隔で配置された4つの2次コイル21〜24の極(X,Y,/X,/Y)を、サイン相、コサイン相、マイナス・サイン相、マイナス・コサイン相として、サイン及びコサインの2相のレゾルバ出力信号と同様の出力信号を取り出し、該出力信号から位相角データを求めることにより、該位相角データを極座標の偏角θに対応するデータとして得ることができる。
レゾルバ原理を採用する場合、コイル部2の各極(X,Y,/X,/Y)に対応する2次コイル21〜24に生じる誘導出力交流信号の振幅関数が、サイン関数、コサイン関数、マイナス・サイン関数、マイナス・コサイン関数にそれぞれ相当するものとなるように、各2次コイル21〜24の配置及び磁気応答部材3の磁気的性質及び量を、設定する。種々の条件によって、各コイルの配置は微妙に変わり得るし、磁気応答部材3の磁気的性質及び量も変わりうるので、希望の関数特性が得られるように各コイル配置を適宜調整したり、あるいは2次出力レベルを電気的増幅によって調整することにより、希望の振幅関数特性が最終的に得られるようにすることができる。従って、各2次コイル21〜24の配置と磁気応答部材3及び量は重要ではあるが、絶対的精度を要求されるわけではなく、設計上適宜に設定若しくは変更できる。
【0013】
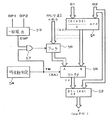
レゾルバ原理を採用する場合、図4に示すように、コイル部2の1次及び2次コイルを回路を構成する。X軸(サイン相)の2次コイル21,23を差動接続し、Y軸(コサイン相)の2次コイル22,24を差動接続して、2つの出力信号を取り出すので、基本的なコイル結線は図3と変わらないが、整流回路は設けない。各2次コイル21〜24の誘導出力信号は、傾斜方向を示す偏角θに対応して2相の関数特性sinθ,cosθ及びその逆相の関数特性−sinθ,−cosθで振幅変調された状態で夫々出力されるようにすることができる。説明の便宜上、コイルの巻数等、その他の条件に従う係数は省略し、2次コイル21(サイン相)の出力信号を「sinθ・sinωt」で示し、2次コイル22(コサイン相)の出力信号を「cosθ・sinωt」で示す。また、2次コイル23(マイナス・サイン相)の出力信号を「−sinθ・sinωt」で示し、2次コイル24(マイナス・コサイン相)の出力信号を「−cosθ・sinωt」で示す。サイン相とマイナス・サイン相の誘導出力を差動的に合成することによりサイン関数の振幅関数を持つ第1の出力交流信号A(=2sinθ・sinωt)が得られる。また、コサイン相とマイナス・コサイン相の誘導出力を差動的に合成することによりコサイン関数の振幅関数を持つ第2の出力交流信号B(=2cosθ・sinωt)が得られる。なお、表現の簡略化のために、係数「2」を省略して、以下では、第1の出力交流信号Aを「sinθ・sinωt」で表わし、第2の出力交流信号Bを「cosθ・sinωt」で表わす。
【0014】
こうして、偏角θに対応する第1の関数値sinθを振幅値として持つ第1の出力交流信号A=sinθ・sinωtと、同じ偏角θに対応する第2の関数値cosθを振幅値として持つ第2の出力交流信号B=cosθ・sinωtとが出力される。このようなコイル構成によれば、回転型位置検出装置として従来知られたレゾルバにおいて得られるのと同様の、同相交流であって2相の振幅関数を持つ2つの出力交流信号A,B(サイン出力とコサイン出力)をコイル部2から得ることができるようにすることが理解できる。
このコイル部2から出力される2相の出力交流信号(A=sinθ・sinωtとB=cosθ・sinωt)は、従来知られたレゾルバの出力と同様の使い方をすることができる。例えば、図4に示すように、コイル部2の出力交流信号A,Bを適切なディジタル位相検出回路40に入力し、前記サイン関数sinθとコサイン関数cosθの位相値θをディジタル位相検出方式によって検出し、偏角θのディジタルデータDθを得るようにすることができる。こうして、レゾルバ原理に従う位相角検出処理によって、極座標の偏角θを示すディジタルデータDθを得ることができ、これによって検出対象の傾斜方向を検出することができる。
【0015】
この場合、傾斜の大きさ(傾斜角)は、前記数1に示す極座標公式の応用・変形によって、適宜求めることができる。例えば、図4の判定処理回路28において、各2次コイル21〜24の出力信号を整流した信号を入力し、この入力信号から最大レベルのものを検出し、ここから極座標の象限を判定してこの最大レベル値を直交座標のx値又はy値とし、かつ、前記ディジタルデータDθにもとづいて得た偏角θを利用して、極座標公式から動径ρを求めれば、傾斜の大きさ(傾斜角)を検出することができる。
なお、ディジタル位相検出回路40で採用するディジタル位相検出方式としては、公知のR−D(レゾルバ−ディジタル)コンバータを適用してもよいし、本発明者らによって開発済の新方式を採用してもよい。
【0016】
収納体1の収納空間は、リング状に限らず、凸曲面又は凹曲面状のような曲面状であってもよい。
図5は、その一例を示すもので、収納体1の収納空間が凸曲面状の収納空間1bからなる例を示す。(a)は凸曲面状の収納空間1bを有する収納体1の外観略図、(b)は水平状態におけるその断面略図、(c)は水平状態におけるその平面略図、(d)は適宜傾いた状態におけるその平面略図、である。
図5の例では、(b)(c)に示すように、検出対象面が水平のときは、流体状の磁気応答部材3は凸曲面状収納空間1bの最も低い箇所である外周縁部分に沿ってリング状に均等に分布する。検出対象面が任意の方向に傾くと、収納体1の凸曲面状収納空間1bも傾き、(d)に示すように、その傾き方向に偏って磁気応答部材3が分布する。従って、図1の実施例と同様に、傾きに対応する出力信号がコイル部2から得られ、これに基づき傾斜の方向と大きさを検出することができる。
【0017】
図6は、別の例を示すもので、収納体1の収納空間が凹曲面状の収納空間1cからなる例を示す。(a)は凹曲面状の収納空間1cを有する収納体1の外観略図、(b)は水平状態におけるその断面略図、(c)は水平状態におけるその平面略図、(d)は適宜傾いた状態におけるその平面略図、である。
図6の例では、(b)(c)に示すように、検出対象面が水平のときは、流体状の磁気応答部材3は凹曲面状収納空間1cの最も低い箇所である中央部分に集中して分布する。検出対象面が任意の方向に傾くと、収納体1の凹曲面状収納空間1cも傾き、(d)に示すように、その傾き方向に偏って磁気応答部材3が分布する。従って、図1の実施例と同様に、傾きに対応する出力信号がコイル部2から得られ、これに基づき傾斜の方向と大きさを検出することができる。
図5,図6の例共、コイル部2は図1(d)と同様の配置で設けるようにしてよい。その場合、各コイルの配置が凸曲面又は凹曲面に沿っていてもよいし、沿っていずに平面的に配置されていてもよい。
【0018】
各実施例において、1次コイルは、各2次コイル21〜24に1対1で対応して設ける必要はなく、2次コイル21〜24の全体をカバーしうるように1個のみ又は適宜数だけ設けるようにしてよい。図7は、その一例を示すもので、2次コイル21〜24の配置の外側を囲んで1つの1次コイル15を設けたものである。このように1個の1次コイル15を設ける場合、2次コイル21〜24の配置の内側に設けてもよい。
また、コイル部2におけるコイル数及びその配置は上記実施例に示すものに限らず、様々な設計変更が可能である。例えば、上記実施例のような4極からなるコイル構成に限らず、6極あるいは8極あるいは12極等、任意である。
また、図1の例のようにリング状の収納空間1aとする場合は、図8の例に示すように、収納体1’をリング状の収納空間1aを有するチューブ形状とし、該リングの円周方向にコイル巻き軸が一致するように各コイルをチューブ形状の収納体1’に挿入し、一円周に沿って各極(X,Y,/X,/Y)の1次及び2次コイル11〜14,21〜24が所定のコイル長で順次並ぶように配置してもよい。この場合も、極数は4極(8個のコイル)に限らず、任意である。
次に、図4に示したディジタル位相検出回路40のいくつかの例について説明する。
【0019】
図9は、ディジタル位相検出回路40として、公知のR−D(レゾルバ−ディジタル)コンバータを適用した例を示す。コイル部2の2次コイル21〜24から出力されるレゾルバタイプの2相の出力交流信号A=sinθ・sinωtとB=cosθ・sinωtが、それぞれアナログ乗算器30,31に入力される。順次位相発生回路32では位相角φのディジタルデータを発生し、サイン・コサイン発生回路33から該位相角φに対応するサイン値sinφとコサイン値cosφのアナログ信号を発生する。乗算器30では、サイン相の出力交流信号A=sinθ・sinωtに対してサイン・コサイン発生回路33からのコサイン値cosφを乗算し、「cosφ・sinθ・sinωt」を得る。もう一方の乗算器31では、コサイン相の出力交流信号B=cosθ・sinωtに対してサイン・コサイン発生回路33からのサイン値sinφを乗算し、「sinφ・cosθ・sinωt」を得る。引算器34で、両乗算器30,31の出力信号の差を求め、この引算器34の出力によって順次位相発生回路32の位相発生動作を次のように制御する。すなわち、順次位相発生回路32の発生位相角φを最初は0にリセットし、以後順次増加していき、引算器34の出力が0になったとき増加を停止する。引算器34の出力が0になるのは、「cosφ・sinθ・sinωt」=「sinφ・cosθ・sinωt」が成立したときであり、すなわち、φ=θが成立し、順次位相発生回路32から位相角φのディジタルデータが出力交流信号A,Bの振幅関数の位相角θのディジタル値に一致している。従って、任意のタイミングで周期的にリセットトリガを与えて順次位相発生回路32の発生位相角φを0にリセットして、該位相角φのインクリメントを開始し、引算器34の出力が0になったとき、該インクリメントを停止し、位相角θのディジタルデータを得る。
なお、順次位相発生回路32をアップダウンカウンタ及びVCOを含んで構成し、引算器34の出力によってVCOを駆動してアップダウンカウンタのアップ/ダウンカウント動作を制御するようにすることが知られており、その場合は、周期的なリセットトリガは不要である。
【0020】
温度変化等によってコイル部2の1次及び2次コイルのインピーダンスが変化することにより2次出力交流信号における電気的交流位相ωtに誤差が生じるが、上記のような位相検出回路においては、sinωtの位相誤差は自動的に相殺されるので、好都合である。これに対して、従来知られた2相交流信号(例えばsinωtとcosωt)で励磁することにより1相の出力交流信号に電気的位相シフトが生じるようにした方式では、そのような温度変化等に基づく出力位相誤差を除去することができない。
ところで、上記のような従来のR−Dコンバータからなる位相検出回路は、追従比較方式であるため、φを追従カウントするときのクロック遅れが生じ、応答性が悪い、という問題がある。
そこで、本発明者等は、以下に述べるような新規な位相検出回路を開発したので、これを使用すると好都合である。
【0021】
図10は、本発明に係る傾斜検出装置に適用される新規なディジタル位相検出回路40の一実施形態を示している。
図10において、検出回路部41では、カウンタ42で所定の高速クロックパルスCKをカウントし、そのカウント値に基づき励磁信号発生回路43から励磁用の交流信号(例えばsinωt)を発生し、コイル部2の1次コイル11〜15与える。カウンタ42のモジュロ数は、励磁用の交流信号の1周期に対応しており、説明の便宜上、そのカウント値の0は、基準のサイン信号sinωtの0位相に対応しているものとする。コイル部2の2次コイル21〜24から出力される2相の出力交流信号A=sinθ・sinωtとB=cosθ・sinωtは、検出回路部41に入力される。
【0022】
検出回路部41において、第1の交流出力信号A=sinθ・sinωtが位相シフト回路44に入力され、その電気的位相が所定量位相シフトされ、例えば90度進められて、位相シフトされた交流信号A’=sinθ・cosωtが得られる。また、検出回路部41においては加算回路45と減算回路46とが設けられており、加算回路45では、位相シフト回路44から出力される上記位相シフトされた交流信号A’=sinθ・cosωtとコイル部10の2次コイル21〜24から出力され第2の交流出力信号B=cosθ・sinωtとが加算され、その加算出力として、B+A’=cosθ・sinωt+sinθ・cosωt=sin(ωt+θ)なる略式で表わせる第1の電気的交流信号Y1が得られる。減算回路46では、上記位相シフトされた交流信号A’=sinθ・cosωtと上記第2の交流出力信号B=cosθ・sinωtとが減算され、その減算出力として、B−A’=cosθ・sinωt−sinθ・cosωt=sin(ωt−θ)なる略式で表わせる第2の電気的交流信号Y2が得られる。このようにして、通路1a内の磁気応答部材3のリニア位置(x)に対応して正方向にシフトされた電気的位相角(+θ)を持つ第1の電気的交流信号Y1=sin(ωt+θ)と、同じ前記リニア位置(x)に対応して負方向にシフトされた電気的位相角(−θ)を持つ第2の電気的交流信号Y2=sin(ωt−θ)とが、電気的処理によって夫々得られる。
【0023】
加算回路45及び減算回路46の出力信号Y1,Y2は、夫々ゼロクロス検出回路47,48に入力され、それぞれのゼロクロスが検出される。ゼロクロスの検出の仕方としては、例えば、各信号Y1,Y2の振幅値が負から正に変化するゼロクロスつまり0位相を検出する。各回路47,48で検出したゼロクロス検出パルスつまり0位相検出パルスは、ラッチパルスLP1,LP2として、ラッチ回路49,50に入力される。ラッチ回路49,50では、カウンタ42のカウント値を夫々のラッチパルスLP1,LP2のタイミングでラッチする。前述のように、カウンタ42のモジュロ数は励磁用の交流信号の1周期に対応しており、そのカウント値の0は基準のサイン信号sinωtの0位相に対応しているものとしたので、各ラッチ回路49,50にラッチしたデータD1,D2は、それぞれ、基準のサイン信号sinωtに対する各出力信号Y1,Y2の位相ずれに対応している。各ラッチ回路49,50の出力は誤差計算回路51に入力されて、「(D1+D2)/2」の計算が行なわれる。なお、この計算は、実際は、「D1+D2」のバイナリデータの加算結果を1ビット下位にシフトすることで行われるようになっていてよい。
【0024】
ここで、コイル部2と検出回路部41間の配線ケーブル長の長短による影響や、コイル部2の各1次及び2次コイルにおいて温度変化等によるインピーダンス変化が生じていることを考慮して、その出力信号の位相変動誤差を「±d」で示すと、検出回路部41における上記各信号は次のように表わされる。
A=sinθ・sin(ωt±d)
A’=sinθ・cos(ωt±d)
B=cosθ・sin(ωt±d)
Y1=sin(ωt±d+θ)
Y2=sin(ωt±d−θ)
D1=±d+θ
D2=±d−θ
【0025】
すなわち、各位相ずれ測定データD1,D2は、基準のサイン信号sinωtを基準位相に使用して位相ずれカウントを行なうので、上記のように位相変動誤差「±d」を含む値が得られてしまう。そこで、誤差計算回路51において、「(D1+D2)/2」の計算を行なうことにより、
【0026】
誤差計算回路51で求められた位相変動誤差「±d」のデータは、減算回路52に与えられ、一方の位相ずれ測定データD1から減算される。すなわち、減算回路52では、「D1−(±d)」の減算が行なわれるので、
D1−(±d)=±d+θ−(±d)=θ
となり、位相変動誤差「±d」を除去した正しい検出位相差θを示すディジタルデータが得られる。このように、本発明によれば、位相変動誤差「±d」が相殺されて、正しい位相差θのみが抽出されることが理解できる。
【0027】
この点を図11を用いて更に説明する。図11においては、位相測定の基準となるサイン信号sinωtと前記第1及び第2の交流信号Y1,Y2の0位相付近の波形を示しており、同図(a)は位相変動誤差がプラス(+d)の場合、(b)はマイナスの場合(−d)を示す。同図(a)の場合、基準のサイン信号sinωtの0位相に対して第1の信号Y1の0位相は「θ+d」だけ進んでおり、これに対応する位相差検出データD1は「θ+d」に相当する位相差を示す。また、基準のサイン信号sinωtの0位相に対して第2の信号Y2の0位相は「−θ+d」だけ遅れており、これに対応する位相差検出データD2は「−θ+d」に相当する位相差を示す。この場合、誤差計算回路51では、
D1−(+d)=+d+θ−(+d)=θ
が計算され、正しい位相差θが抽出される。
【0028】
図11(b)の場合、基準のサイン信号sinωtの0位相に対して第1の信号Y1の0位相は「θ−d」だけ進んでおり、これに対応する位相差検出データD1は「θ−d」に相当する位相差を示す。また、基準のサイン信号sinωtの0位相に対して第2の信号Y2の0位相は「−θ−d」だけ遅れており、これに対応する位相差検出データD2は「−θ−d」に相当する位相差を示す。この場合、誤差計算回路51では、
D1−(−d)=−d+θ−(−d)=θ
が計算され、正しい位相差θが抽出される。
なお、減算回路52では。「D2−(±d)」の減算を行なうようにしてもよく、原理的には上記と同様に正しい位相差θを反映するデータ(−θ)が得られることが理解できるであろう。
【0029】
また、図11からも理解できるように、第1の信号Y1と第2の信号Y2との間の電気的位相差は2θであり、常に、両者における位相変動誤差「±d」を相殺した正確な位相差θの2倍値を示していることになる。従って、図10におけるラッチ回路49,50及び誤差計算回路51及び減算回路52等を含む回路部分の構成を、信号Y1,Y2の電気的位相差2θをダイレクトに求めるための構成に適宜変更するようにしてもよい。例えば、ゼロクロス検出回路47から出力される第1の信号Y1の0位相に対応するパルスLP1の発生時点から、ゼロクロス検出回路48から出力される第2の信号Y2の0位相に対応するパルスLP2の発生時点までの間を適宜の手段でゲートし、このゲート期間をカウントすることにより、位相変動誤差「±d」を相殺した、電気的位相差(2θ)に対応するディジタルデータを得ることができ、これを1ビット下位にシフトすれば、θに対応するデータが得られる。
【0030】
ところで、上記実施例では、+θをラッチするためのラッチ回路49と、−θをラッチするためのラッチ回路50とでは、同じカウンタ42の出力をラッチするようにしており、ラッチしたデータの正負符号については特に言及していない。しかし、データの正負符号については、本発明の趣旨に沿うように、適宜の設計的処理を施せばよい。例えば、カウンタ42のモジュロ数が4096(10進数表示)であるとすると、そのディジタルカウント0〜4095を0度〜360度の位相角度に対応させて適宜に演算処理を行なうようにすればよい。最も単純な設計例は、カウンタ42のカウント出力の最上位ビットを符号ビットとし、ディジタルカウント0〜2047を+0度〜+180度に対応させ、ディジタルカウント2048〜4095を−180度〜−0度に対応させて、演算処理を行なうようにしてもよい。あるいは、別の例として、ラッチ回路50の入力データ又は出力データを2の補数に変換することにより、ディジタルカウント4095〜0を−360度〜−0度の負の角度データ表現に対応させるようにしてもよい。
【0031】
ところで、傾斜が静止状態のときは特に問題ないのであるが、検出対象傾斜が時間的に変化するときは、それに対応する位相角θも時間的に変動することになる。その場合、加算回路45及び減算回路46の各出力信号Y1,Y2の位相ずれ量θが一定値ではなく、移動速度に対応して時間的に変化する動特性を示すものとなり、これをθ(t)で示すと、各出力信号Y1,Y2は、
Y1=sin{ωt±d+θ(t)}
Y2=sin{ωt±d−θ(t)}
となる。すなわち、基準信号sinωtの周波数に対して、進相の出力信号Y1は+θ(t)に応じて周波数が高くなる方向に周波数遷移し、遅相の出力信号Y2は−θ(t)に応じて周波数が低くなる方向に周波数遷移する。このような動特性の下においては、基準信号sinωtの1周期毎に各信号Y1,Y2の周期が互いに逆方向に次々に遷移していくので、各ラッチ回路49,50における各ラッチデータD1,D2の計測時間基準が異なってくることになり、両データD1,D2を単純に回路51,52で演算するだけでは、正確な位相変動誤差「±d」を得ることができない。
【0032】
このような問題を回避するための最も簡単な方法は、図10の構成において、検出傾斜が時間的に動いているときの出力を無視し、静止状態のときの出力のみを用いて、静止状態が得られた時の位相角θを測定するように装置の機能を限定することである。すなわち、そのような限定された目的のために本発明を実施するようにしてもよいものである。
しかし、検出対象傾斜が時間的に変化している最中であっても時々刻々の該検出対象傾斜に対応する位相角θを正確に検出できるようにすることが望ましい。そこで、上記のような問題点を解決するために、検出対象傾斜が時間的に変化している最中であっても時々刻々の該検出対象傾斜に対応する位相角θを検出できるようにした改善策について図12を参照して説明する。
【0033】
図12は、図10の検出回路部41における誤差計算回路51と減算回路52の部分の変更例を抽出して示しており、他の図示していない部分の構成は図10と同様であってよい。検出対象傾斜が時間的に変化している場合における該傾斜方向に対応する位相角θを、+θ(t)および−θ(t)で表わすと、各出力信号Y1,Y2は前記のように表わせる。そして、夫々に対応してラッチ回路49,50で得られる位相ずれ測定値データD1,D2は、
D1=±d+θ(t)
D2=±d−θ(t)
となる。
この場合、±d+θ(t) は、θの時間的変化に応じて、プラス方向に0度から360度の範囲で繰り返し時間的に変化してゆく。また、±d−θ(t) は、θの時間的変化に応じて、マイナス方向に360度から0度の範囲で繰り返し時間的に変化してゆく。従って、±d+θ(t) ≠ ±d−θ(t) のときもあるが、両者の変化が交差するときもあり、そのときは±d+θ(t) = ±d−θ(t) が成立する。このように、±d+θ(t) = ±d−θ(t) が成立するときは、各出力信号Y1,Y2の電気的位相が一致しており、かつ、夫々のゼロクロス検出タイミングに対応するラッチパルスLP1,LP2の発生タイミングが一致していることになる。
【0034】
図12において、一致検出回路53は、各出力信号Y1,Y2ののゼロクロス検出タイミングに対応するラッチパルスLP1,LP2の発生タイミングが、一致したことを検出し、この検出に応答して一致検出パルスEQPを発生する。一方、時変動判定回路54では、適宜の手段により(例えば一方の位相差測定データD1の値の時間的変化の有無を検出する等の手段により)、検出対象傾斜が時間的に変化するモードであることを判定し、この判定に応じて時変動モード信号TMを出力する。
誤差計算回路51と減算回路52との間にセレクタ55が設けられており、上記時変動モード信号TMが発生されていないとき、つまりTM=“0”すなわち検出対象傾斜が時間的に変化していないとき、セレクタ入力Bに加わる誤差計算回路51の出力を選択して減算回路52に入力する。このようにセレクタ55の入力Bが選択されているときの図12の回路は、図10の回路と等価的に動作する。すなわち、検出対象が静止しているときは、誤差計算回路51の出力データがセレクタ55の入力Bを介して減算回路52に直接的に与えられ、図10の回路と同様に動作する。
【0035】
一方、上記時変動モード信号TMが発生されているとき、つまりTM=“1”すなわち検出対象が時間的に変化しているときは、セレクタ55の入力Aに加わるラッチ回路56の出力を選択して減算回路52に入力する。上記時変動モード信号TMが“1”で、かつ前記一致検出パルスEQPが発生されたとき、アンドゲート57の条件が成立して、該一致検出パルスEQPに応答するパルスがアンドゲート57から出力され、ラッチ回路56に対してラッチ命令を与える。ラッチ回路56は、このラッチ命令に応じてカウンタ42の出力カウントデータをラッチする。ここで、一致検出パルスEQPが生じるときは、カウンタ42の出力をラッチ回路49,50に同時にラッチすることになるので、D1=D2であり、ラッチ回路56にラッチするデータは、D1又はD2(ただしD1=D2)に相当している。
【0036】
また、一致検出パルスEQPは、各出力信号Y1,Y2のゼロクロス検出タイミングが一致したとき、すなわち「±d+θ(t) = ±d−θ(t)」が成立したとき、発生されるので、これに応答してラッチ回路56にラッチされるデータは、D1又はD2(ただしD1=D2)に相当しているが故に、
(D1+D2)/2
と等価である。このことは、
【0037】
こうして、検出対象が時間的に変動しているときは、位相変動誤差「±d」を正確に示すデータが一致検出パルスEQPに応じてラッチ回路56にラッチされ、このラッチ回路56の出力データがセレクタ55の入力Aを介して減算回路52に与えられる。従って、減算回路52では、位相変動誤差「±d」を除去した検出対象傾斜方向に正確に応答するデータθ(時間的に変動する場合はθ(t) )を得ることができる。
なお、図12において、アンドゲート57を省略して、一致検出パルスEQPを直接的にラッチ回路56のラッチ制御入力に与えるようにしてもよい。
また、ラッチ回路56には、カウンタ42の出力カウントデータに限らず、図10で破線で示すように誤差計算回路51の出力データ「±d」をラッチするようにしてもよい。その場合は、一致検出パルスEQPの発生タイミングに対して、それに対応する誤差計算回路51の出力データの出力タイミングが、ラッチ回路49,50及び誤差計算回路51の回路動作遅れの故に、幾分遅れるので、適宜の時間遅れ調整を行なった上で、誤差計算回路51の出力をラッチ回路56にラッチするようにするとよい。
また、動特性のみを考慮して検出回路部41を構成する場合は、図12の回路51及びセレクタ55と図10の一方のラッチ回路49又は50を省略してもよいことが、理解できるであろう。
【0038】
図13は、位相変動誤差「±d」を相殺することができる位相差検出演算法についての別の実施例を示す。
コイル部2の2次コイル21〜24から出力されるレゾルバタイプの前記第1及び第2の交流出力信号A,Bは、検出回路部60に入力され、図10の例と同様に、第1の交流出力信号A=sinθ・sinωtが位相シフト回路44に入力され、その電気的位相が所定量位相シフトされて、位相シフトされた交流信号A’=sinθ・cosωtが得られる。また、減算回路46では、上記位相シフトされた交流信号A’=sinθ・cosωtと上記第2の交流出力信号B=cosθ・sinωtとが減算され、その減算出力として、B−A’=cosθ・sinωt−sinθ・cosωt=sin(ωt−θ)なる略式で表わせる電気的交流信号Y2が得られる。減算回路46の出力信号Y2はゼロクロス検出回路48に入力され、ゼロクロス検出に応じてラッチパルスLP2が出力され、ラッチ回路50に入力される。
【0039】
図13の実施例が図10の実施例と異なる点は、検出対象に対応する電気的位相ずれを含む交流信号Y2=sin(ωt−θ)から、その位相ずれ量θを測定する際の基準位相が相違している点である。図10の例では、位相ずれ量θを測定する際の基準位相は、基準のサイン信号sinωtの0位相であり、これは、傾斜計10のコイル部2に入力されるものではないので、温度変化等によるコイルインピーダンス変化やその他の各種要因に基づく位相変動誤差「±d」を含んでいないものである。そのために、図10の例では、2つの交流信号Y1=sin(ωt+θ)及びY2=sin(ωt−θ)を形成し、その電気的位相差を求めることにより、位相変動誤差「±d」を相殺するようにしている。これに対して、図13の実施例では、コイル部2から出力される第1及び第2の交流出力信号A,Bを基にして、位相ずれ量θを測定する際の基準位相を形成し、該基準位相そのものが上記位相変動誤差「±d」を含むようにすることにより、上記位相変動誤差「±d」を排除するようにしている。
【0040】
すなわち、検出回路部60において、コイル部2から出力された前記第1及び第2の交流出力信号A,Bがゼロクロス検出回路61,62に夫々入力され、それぞれのゼロクロスが検出される。なお、ゼロクロス検出回路61,62は、入力信号A,Bの振幅値が負から正に変化するゼロクロス(いわば0位相)と正から負に変化するゼロクロス(いわば180度位相)のどちらにでも応答してゼロクロス検出パルスを出力するものとする。これは信号A,Bの振幅の正負極性を決定するsinθとcosθがθの値に応じて任意に正又は負となるため、両者の合成に基づき360度毎のゼロクロスを検出するためには、まず180度毎のゼロクロスを検出する必要があるためである。両ゼロクロス検出回路61,62から出力されるゼロクロス検出パルスがオア回路63でオア合成され、該オア回路63の出力が適宜の1/2分周パルス回路64(例えばT−フリップフロップのような1/2分周回路とパルス出力用アンドゲートを含む)に入力されて、1つおきに該ゼロクロス検出パルスが取り出され、360度毎のゼロクロスすなわち0位相のみに対応するゼロクロス検出パルスが基準位相信号パルスRPとして出力される。この基準位相信号パルスRPは、カウンタ65のリセット入力に与えられる。カウンタ65は所定のクロックパルスCKを絶えずカウントするものであるが、そのカウント値が、前記基準位相信号パルスRPに応じて繰返し0にリセットされる。このカウンタ65の出力がラッチ回路50に入力され、前記ラッチパルスLP2の発生タイミングで、該カウント値が該ラッチ回路50にラッチされる。ラッチ回路50にラッチしたデータDが、検出対象に対応した位相差θの測定データとして出力される。
【0041】
コイル部2から出力される第1及び第2の交流出力信号A,Bは、それぞれ、A=sinθ・sinωt、B=cosθ・sinωt、であり、電気的位相は同相である。従って、同じタイミングでゼロクロスが検出されるはずであるが、振幅係数がサイン関数sinθ及びコサイン関数cosθで変動するので、どちらかの振幅レベルが0か又は0に近くなる場合があり、そのような場合は、一方については、事実上、ゼロクロスを検出することができない。そこで、この実施例では、2つの交流出力信号A=sinθ・sinωt、B=cosθ・sinωtのそれぞれについてゼロクロス検出処理を行ない、両者のゼロクロス検出出力をオア合成することにより、どちらか一方が振幅レベル小によってゼロクロス検出不能であっても、他方の振幅レベル大の方のゼロクロス検出出力信号を利用できるようにしたことを特徴としている。
【0042】
図13の例の場合、コイル部2のコイルインピーダンス変化等による位相変動誤差が、例えば「−d」であるとすると、減算回路46から出力される交流信号Y2は、図14の(a)に示すように、Y2=sin(ωt−d−θ)となる。この場合、コイル部2の出力信号A,Bは、位相角θに応じた振幅値sinθ及びcosθを夫々持ち、図14の(b)に例示するように、A=sinθ・sin(ωt−d)、B=cosθ・sin(ωt−d)、というように位相変動誤差分を含んでいる。従って、このゼロクロス検出に基づいて図14の(c)のようなタイミングで得られる基準位相信号パルスRPは、本来の基準のサイン信号sinωtの0位相から位相変動誤差−dだけずれたものである。従って、この基準位相信号パルスRPを基準として、減算回路46の出力交流信号Y2=sin(ωt−d−θ)の位相ずれ量を測定すれば、位相変動誤差−dを除去した正確な値θが得られることになる。
【0043】
なお、コイル部2の配線長等の装置条件が定まると、そのインピーダンス変化は主に温度に依存することになる。そうすると、上記位相変動誤差±dは、この傾斜検出装置が配備された周辺環境の温度を示すデータに相当する。従って、図10の実施例のような位相変動誤差±dを演算する回路51を有するものにおいては、そこで求めた位相変動誤差±dのデータを温度検出データとして適宜出力することができる。従って、そのような本発明の構成によれば、1つの傾斜検出装置によって検出対象の傾斜を検出することができるのみならず、該傾斜検出装置の周辺環境の温度を示すデータをも得ることができる、という優れた効果を有するものである。勿論、温度変化等によるセンサ側のインピーダンス変化や配線ケーブル長の長短の影響を受けることなく、検出対象の傾斜に応答した高精度の検出が可能となる、という優れた効果をも奏するものである。また、図10や図図12,図13の例は、交流信号における位相差を測定する方式であるため、図9のような検出法に比べて、高速応答性にも優れた検出を行なうことができる、という優れた効果を奏する。
【0044】
なお、上記各実施例において、コイル部2と磁気応答部材3による検出原理を、公知の位相シフトタイプ位置検出原理によって構成してもよい。例えば、図4に示されたコイル部2において、1次コイルと2次コイルの関係を逆にして、サイン相のコイル21とマイナス・サイン相のコイル23を互いに逆相のサイン信号sinωt,−sinωtによって励磁し、コサイン相のコイル22とマイナス・コサイン相のコイル24を互いに逆相のコサイン信号cosωt,−cosωtによって励磁し、コイル11〜14から検出対象傾斜に応じた電気的位相シフトθを含む出力信号sin(ωt−θ)を得るようにしてもよい。
また、コイル部2と磁気応答部材3による検出原理を、公知の差動トランス型の位置検出原理に基づいてアナログ検出出力を得るように構成してもよいことは前述の通りである。
【0045】
あるいは、上記各実施例において、コイル部2の構成として、1次コイルと2次コイルの対を含むように構成せずに、1つのコイルのみによって構成し、該1つのコイルを所定の交流信号によって定電圧駆動し、該コイルへの磁性体(磁気応答部材3)の侵入量に応じて生じるインダクタンス変化に基づく電流変化を計測することにより、傾斜検出データを得るようにしてもよい。その場合、該電流変化に応答する出力信号の振幅変化を測定する方法、あるいは該電流変化に応答するコイル各端部での出力信号間の位相変化を測定する方法などによって所要の測定を行うことができる。
また、上記各実施例において、検出データの出力形式は、ディジタルアブソリュートデータまたはアナログ電圧データ等に限らず、インクリメンタルパルスデータあるいはアブソリュート値を周波数変換した繰り返しパルス信号など、利用目的に応じて適宜の形式としてよい。
【0046】
【発明の効果】
以上の通り、本発明によれば、1つの傾斜検出装置によって多方向の傾斜検出(傾斜方向と傾斜量の検出)ができる新規な多方向傾斜検出装置を提供することができる。また、誘導型であるため、構造的に非接触であり、構成が簡単かつ安価に製造することができ、かつ劣悪な環境下での使用にも耐えうる、という優れた効果を奏する。
【図面の簡単な説明】
【図1】 本発明に係る多方向傾斜検出装置の一実施例を示す図。
【図2】 図1における収納空間内に収納された流動性磁気応答部材の傾斜時の状態を略示する図。
【図3】 図1におけるコイル部の構成例を示す回路図。
【図4】 図1におけるコイル部の別の構成例を示す回路図。
【図5】 本発明に係る多方向傾斜検出装置の別の実施例を示す図であって、収納体内の収納空間の変更例を示すもの。
【図6】 本発明に係る多方向傾斜検出装置の更に別の実施例を示す図であって、収納体内の収納空間の別の変更例を示すもの。
【図7】 図1に示されたコイル部の変更例を示す図。
【図8】 図1に示された収納体とコイル部の別の変更例を示す図。
【図9】 本発明に係る傾斜検出装置に適用可能な位相検出タイプの測定回路の一例を示すブロック図。
【図10】 本発明に係る傾斜検出装置に適用可能な位相検出タイプの測定回路の別の例を示すブロック図。
【図11】 図10の動作説明図。
【図12】 図10の回路に付加される変更例を示すブロック図。
【図13】 本発明に係る傾斜検出装置に適用可能な位相検出タイプの測定回路の更に別の例を示すブロック図。
【図14】 図13の動作説明図。
【符号の説明】
1 収納体
1a,1b,1c 収納空間
2 コイル部
11〜15 1次コイル
21〜24 2次コイル
3 流動性の磁気応答部材
27,28 判定処理回路
40 ディジタル位相検出回路
Claims (2)
- リング状の収納空間を有する収納体であって、該収納空間のリングが検出対象面に平行となるように該検出対象面に設置されるものと、
前記収納空間内にて重力に従って移動自在に収納された流動性の磁気応答部材と、
前記収納体において前記収納空間に対応して配置されたコイル部と
を具え、前記検出対象面の任意の方向の傾きに応じて前記磁気応答部材が前記リング状の収納空間を移動し、該収納空間における前記磁気応答部材の分布に応答する出力信号を前記コイル部から生成し、これにより前記傾きを検出する多方向傾斜検出装置であって、
前記コイル部は、前記収納空間のリングに沿って等間隔で配置された4つのコイルを含み、そのうち、リング中心に対して180度反対側に隔てられている2つのコイルにより第1のコイルグループを構成し、別の180度反対側に隔てられている2つのコイルにより第2のコイルグループを構成し、各コイルを所定の交流信号で励磁し、各コイルグループ内の2つのコイルの出力を差動合成して各グループ毎の出力交流信号をそれぞれ生成し、これにより、前記リング状の収納空間を移動する前記磁気応答部材の相対的位置に応じて、前記第1のコイルグループは、X軸座標又はサイン相の振幅関数特性を示す第1の出力交流信号を生じ、また、前記第2のコイルグループは、Y軸座標又はコサイン相の振幅関数特性を示す第2の出力交流信号を生じ、
更に、各コイルグループにおける各コイルは前記交流信号によって励磁される1次コイルのみからなり、該各1次コイルに対する前記磁気応答部材の位置に応じたインダクタンス変化に基づく振幅変化を示す出力電圧信号を該各1次コイルから取り出し、これに基づき前記第1及び第2のコイルグループから前記第1の出力交流信号と前記第2の出力交流信号がそれぞれ生成され、
更に、前記第1及び第2の出力交流信号に基づき前記リング中心を中心とする極座標の偏角成分を求めると共に、該第1及び第2の出力交流信号又は前記各1次コイルの出力電圧信号に基づき該極座標の動径成分を求める手段を具備し、
該偏角成分と動径成分により前記検出対象面の傾斜の方向と角度に応じた情報を得ることで、多方向傾斜を検出することを特徴とする多方向傾斜検出装置。 - 曲面状の収納空間を有する収納体であって、該収納空間の曲面が検出対象面に対面するように該検出対象面に設置されるものと、
前記収納空間内にて重力に従って移動自在に収納された流動性の磁気応答部材と、
前記収納体において前記収納空間に対応して配置されたコイル部と
を具え、前記検出対象面の任意の方向の傾きに応じて前記磁気応答部材が前記曲面状の収納空間を移動し、該収納空間における前記磁気応答部材の分布に応答する出力信号を前記コイル部から生成し、これにより前記傾きを検出する多方向傾斜検出装置であって、
前記コイル部は、前記収納空間の曲面の円周方向に沿って等間隔で配置された4つのコイルを含み、そのうち、該曲面の円周中心に対して180度反対側に隔てられている2つのコイルにより第1のコイルグループを構成し、別の180度反対側に隔てられている2つのコイルにより第2のコイルグループを構成し、各コイルを所定の交流信号で励磁し、各コイルグループ内の2つのコイルの出力を差動合成して各グループ毎の出力交流信号をそれぞれ生成し、これにより、前記曲面の収納空間を移動する前記磁気応答部材の相対的位置に応じて、前記第1のコイルグループは、X軸座標又はサイン相の振幅関数特性を示す第1の出力交流信号を生じ、また、前記第2のコイルグループは、Y軸座標又はコサイン相の振幅関数特性を示す第2の出力交流信号を生じ、
更に、各コイルグループにおける各コイルは前記交流信号によって励磁される1次コイルのみからなり、該各1次コイルに対する前記磁気応答部材の位置に応じたインダクタンス変化に基づく振幅変化を示す出力電圧信号を該各1次コイルから取り出し、これに基づき前記第1及び第2のコイルグループから前記第1の出力交流信号と前記第2の出力交流信号がそれぞれ生成され、
更に、前記第1及び第2の出力交流信号に基づき前記曲面の円周中心を中心とする極座標の偏角成分を求めると共に、該第1及び第2の出力交流信号又は前記各1次コイルの出力 電圧信号に基づき該極座標の動径成分を求める手段を具備し、
該偏角成分と動径成分により前記検出対象面の傾斜の方向と角度に応じた情報を得ることで、多方向傾斜を検出することを特徴とする多方向傾斜検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP28331996A JP3733397B2 (ja) | 1996-02-15 | 1996-10-06 | 多方向傾斜検出装置 |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP5391496 | 1996-02-15 | ||
| JP8-53914 | 1996-02-15 | ||
| JP8-87613 | 1996-03-16 | ||
| JP8761396 | 1996-03-16 | ||
| JP28331996A JP3733397B2 (ja) | 1996-02-15 | 1996-10-06 | 多方向傾斜検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH09311038A JPH09311038A (ja) | 1997-12-02 |
| JP3733397B2 true JP3733397B2 (ja) | 2006-01-11 |
Family
ID=27295107
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP28331996A Expired - Lifetime JP3733397B2 (ja) | 1996-02-15 | 1996-10-06 | 多方向傾斜検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3733397B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4699544B2 (ja) * | 1999-03-15 | 2011-06-15 | 株式会社アミテック | 回転型位置検出装置 |
| JP4520766B2 (ja) * | 2004-04-16 | 2010-08-11 | 日本鉄塔工業株式会社 | 回転位置検出装置 |
-
1996
- 1996-10-06 JP JP28331996A patent/JP3733397B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JPH09311038A (ja) | 1997-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108426588B (zh) | 旋转编码器及其绝对角度位置检测方法 | |
| JP4138899B2 (ja) | 位置検出のための位相差検出装置及び位置検出システム並びに方法 | |
| CN108592956B (zh) | 旋转编码器及其绝对角度位置检测方法 | |
| US8664943B2 (en) | Position detecting apparatus | |
| Wu et al. | A rotary encoder with an eccentrically mounted ring magnet | |
| CN108072318B (zh) | 测量绝对角位置 | |
| JP5597540B2 (ja) | 方向トラッキングを使用して回転および角度位置を非接触検知する方法および装置 | |
| US10502588B2 (en) | Magnetic position sensor | |
| JP2011501163A5 (ja) | ||
| JP3742844B2 (ja) | 傾斜又は振動又は加速度の検出装置 | |
| JP3733397B2 (ja) | 多方向傾斜検出装置 | |
| JP3760191B2 (ja) | 球体センサ | |
| JP2000337924A (ja) | R/dコンバータ | |
| JP4048207B2 (ja) | 位置検出装置 | |
| JP3733399B2 (ja) | 傾斜検出装置 | |
| JPH10160460A (ja) | 傾斜検出装置 | |
| JP3978268B2 (ja) | 誘導型位置検出装置 | |
| JP3733400B2 (ja) | 傾斜計 | |
| JP3920896B2 (ja) | リニア位置検出装置 | |
| JP4623765B2 (ja) | 3次元操作検出装置 | |
| JP3920394B2 (ja) | シリンダ位置検出装置 | |
| JPH03103716A (ja) | 位置検出装置 | |
| JP4688268B2 (ja) | 圧力計 | |
| JP3749955B2 (ja) | 誘導型2次元位置検出装置 | |
| JP2001082914A (ja) | 角度検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041217 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050111 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050314 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050517 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050816 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20050914 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050915 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20050915 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091028 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091028 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101028 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101028 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111028 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121028 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131028 Year of fee payment: 8 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |