JP4106507B2 - ミシン - Google Patents
ミシン Download PDFInfo
- Publication number
- JP4106507B2 JP4106507B2 JP17971199A JP17971199A JP4106507B2 JP 4106507 B2 JP4106507 B2 JP 4106507B2 JP 17971199 A JP17971199 A JP 17971199A JP 17971199 A JP17971199 A JP 17971199A JP 4106507 B2 JP4106507 B2 JP 4106507B2
- Authority
- JP
- Japan
- Prior art keywords
- presser
- upper feed
- link
- spring
- feed dog
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Sewing Machines And Sewing (AREA)
Description
【発明の属する技術分野】
本発明は押え金が、左右に揺動可能な押え腕に取付けられ、メンテナンス時などに押え腕を側方に揺動させて押え金を退避させることができるミシンに関する。
【0002】
【従来の技術】
オーバーロックミシンでは、上送り機構を備え、針板上の上送り歯と針板の下の下送り歯とで生地を挟み、協働して布送りを行う。生地は針板上で押え金によって押さえられており、上送り歯は、押え金に形成された透孔に挿入され、この透孔内で布送り動作を行う。
【0003】
針交換などのメンテナンス時には、邪魔にならないように押え金を退避させる必要があり、そのために押え腕は左右に揺動可能に支持されている。
【0004】
縫製時には、押え腕の前記左右の揺動を阻止し、かつ押え金を下方にばね付勢して押え金を針板に押し付ける必要がある。そのために、押え腕の上方から嵌まり込み、押え腕の左右の揺動をロックするとともに、押え腕を下方にばね付勢する押え棒がミシンに設けられる。また上送り歯は生地を挟持するために、押え金の透孔に挿入された状態で下方にばね付勢されている。
【0005】
したがって、押え腕を側方に揺動させるためには、上送り歯をばね力に抗して上方に押し上げ、かつ前記押え棒をばね力に抗して上方に押し上げて押え腕のロック状態を解除し、この状態を保持して、押え腕を側方に揺動させなければならない。このように押え腕を揺動させるには複数の操作を必要とし、操作が煩雑となるといった問題を有する。
【0006】
このような問題を解決する方法として、特開平5−3981号公報には、手動レバー操作によって、押え棒および上送り歯の両方を上方に押し上げる機構を備えたミシンが開示されている。この機構では、たとえば一方の手でレバーを押し下げて、ばね力に抗して押え棒と上送り歯との両方を押し上げ、この間にもう一方の手で押え腕を側方に揺動させる。そして前記一方の手をレバーから外して針交換などのメンテナンスを行う。
【0007】
退避した押え金を元に戻すには、一方の手で再びレバーを押し下げ、その間にもう一方の手で押え腕を揺動させて押え金を元の位置に戻す。
【0008】
【発明が解決しようとする課題】
上述した機構では、片方の手でレバーを操作している間にもう一方の手で押え腕を揺動操作し、その後、両手で針交換などのメンテナンスを行う。このように、押え金の退避操作をするときに両手が塞がれるため、作業効率が悪くなるといった問題を有する。
【0009】
本発明は、メンテナンス時などに片手で容易に押え腕を側方に揺動させ、押え金を退避させることができるミシンを提供することである。
【0010】
【課題を解決するための手段】
本発明は、針板と、
基端部が針板の後方で変位自在に支持され、先端部が針板まで延び、上下および左右方向に揺動可能に設けられる押え腕と、
押え腕の上方に配置され、押え腕の左右の揺動を阻止するロック位置と、ロック位置の上方のロック解除位置とにわたって上下に変位自在に支持され、ロック位置にあるとき押え腕を下方にばね付勢するロック部材と、
透孔を有し、押え腕の先端部に取り付けられ、ロック位置にあるロック部材によって針板に弾発的に押え付けられる押え金と、
押え金の上から前記透孔に挿通される上送り歯と、
先端部に上送り歯が取り付けられ、上下に揺動自在に支持される送り歯支持部材と、
送り歯支持部材を下方にばね付勢する送り押えばね部材とを備えるミシンにおいて、
第1リンクと、第1リンクの一端部に一端部がピン結合される第2リンクと、第1リンクまたは第2リンクに固定される操作部材とを有する2位置安定手段を備え、
2位置安定手段は、予め定める基準位置を超えて一方側から他方側に操作部材を変位させると、他方側に操作部材がばね力によって保持され、前記基準位置を超えて他方側から一方側に操作部材を変位させると、一方側に操作部材がばね力によって保持される構成であり、
操作部材が基準位置を超えるときは、第1リンクの他端部と第2リンクの他端部とを結ぶ基準直線を第1リンクと第2リンクとの結合部が超えて移動することであり、
前記基準位置を超えて操作部材が一方側に変位されると、2位置安定手段からロック部材および送り歯支持材に押し上げ力が作用し、ロック部材がばね力に抗してロック解除位置まで変位するとともに、送り歯支持部材がばね力に抗して上方に押し上げられ、
前記基準位置を超えて操作部材が他方側に変位されると、2位置安定手段からロック部材および送り歯支持部材に作用する押し上げ力が解除され、
少なくとも前記結合部が前記基準直線近傍にあるときおよび操作部材が一方側にあるときには、第1リンクの他端部と第2リンクの他端部とを相互に近接させる向きに、送り押えばね部材からばね力が与えられ、
少なくとも操作部材が他方側にあるときには、操作部材を一方側から他方側へ変位させる向きに、送り押えばね部材とは異なる操作部材押圧ばね部材からばね力が与えられることを特徴とするミシンである。
【0011】
本発明に従えば、2位置安定手段の操作部材を基準位置を越えて一方側に変位させると、ロック部材がばね力に抗して上方のロック解除位置まで押し上げられるとともに、送り歯支持部材もばね力に抗して上方に押し上げられ、それぞれ2位置安定手段によって押し上げられた位置に保持される。したがって、操作部材から手を離してもロック部材はロック解除位置に保持され、上送り歯を上方に押し上げられた位置に保持されるので、操作者は操作部材を操作した手で押え腕を側方に揺動させて押え金を退避させることができる。このようにして操作者は片手で容易に押え金の退避操作を行うことでき、メンテナンス時の作業効率が向上する。
【0012】
また元に戻す場合にも同様に、押え腕を揺動させて押え金を元の位置に戻し、次に2位置安定手段の操作部材を基準位置を越えて一方側から他方側へ変位させる。するとロック部材および送り歯支持部材に作用する押し上げ力が解除され、再び押え腕をロックするとともに、上送り歯が押え金の透孔に嵌まり込む。このように押え金を元の位置に戻す場合にも片手で容易に行うことができる。
【0013】
2位置安定手段の第1リンクと第2リンクとは一端部同士がピン結合され、第1リンクと第2リンクとの結合部が基準直線近傍にあるとき、第1リンクの他端部と第2リンクの他端部とが互いに近接する向きに、送り押えばね部材によってばね付勢されている。操作部材が一方側にあるときもまた、各リンクの他端部が互いに近接する向きに、送り押えばね部材によってばね付勢されている。各リンクの他端部を近接させる向きのばね力は、係合部を基準直線から離反させるように作用し、操作部材が一方側にあるときは、操作部材を一方側に保持し、操作部材が他方側にあるときは、操作部材を他方側に保持するように作用する。また操作部材が他方側にあるとき、送り押えばね部材とは異なる操作部材押圧ばね部材のばね力が、操作部材を他方側に保持するように作用する。したがって操作部材を一方側から他方側へ、または他方側から一方側へ変位させると、その操作部材はいずれか変位された側に安定して保持される。
【0014】
操作部材を安定させるためのばね力は、送り押えばね部材と操作部材押圧ばね部材とから与えられる。各リンクの他端部を近接させる向きのばね力は、操作部材が一方側にあるときには操作部材を一方側に保持し、操作部材が他方側にあるときには他方側に保持するように作用する。このようなばね力を与えるにあたって、送り押えばね部材を利用することによって、2位置安定手段用に強力なばね部材を別途に設ける必要がない。さらに送り押えばね部材に加えて、操作部材押圧ばね部材が設けられ、操作部材が他方側に配置される状態で、上送り歯の位置調整によって、送り押えばね部材のばね力が操作部材に与えられなくなっても、操作部材押圧ばね部材によってばね付勢し、操作部材を他方側に安定して保持することができる。このように簡単な構成で、2位置に確実に安定させることができる、2位置安定手段を実現することができる。
【0018】
【発明の実施の形態】
図1は、本発明の実施の一形態であるミシンの押え腕2近傍の構成を示す斜視図である。なお図1において斜め左上に向う方向を布送り方向Aとし、水平面上でこの布送り方向Aに垂直な方向を左右方向Bとする。
【0019】
本実施形態のミシンはオーバーロックミシンであり、押え金1は針板3上に配置され、押え腕2の前端部に取付けられる。押え腕2は布送り方向Aに延び、後方(布送り方向A下流側)の基端部が、上下方向に延びる揺動軸線L1および左右方向Bに延びる揺動軸線L2まわりに角変位自在に支持され、これによって押え腕2は上下および左右方向Bに揺動可能となる。
【0020】
押え金1には、布送り方向Aに延びる透孔4が形成され、この透孔4には上送り歯5が挿入される。針板3にも同様に布送り方向Aに延びる透孔である送り溝(図示せず)が形成され、この送り溝には針板3の下から下送り歯(図示せず)が挿入される。上送り歯5および下送り歯はそれぞれ同期して布送り方向Aに楕円運動を行い、縫製時には、針板3上で押え金1によって押さえられる生地を挟持して布送り方向Aに送り出す。
【0021】
次に図2を参照して押え腕2および上送り機構の構成について説明する。上送り歯5は、送り歯支持部材15に支持され、送り歯支持部材15は、上送り台10、上送り台ガイド11および上送り台ガイド腕12とから構成される。上送り台10は、布送り方向Aに延び前端部に上送り歯5が取付けられる。上送り台10は上送り台ガイド腕12の前端部に、上送り台ガイド11によって前後方向(布送り方向A)に変位自在に取付けられる。上送り台ガイド腕12は円筒状の挿通部13、レバー部16およびアーム部17とから一体に構成される。挿通部13は前記軸線L2を中心とする挿通孔を有し、この挿通部13の上方に突出してレバー部16が形成され、挿通部13から前方に突出してアーム部17が形成され、このアーム部17の前端部に前記上送り台ガイド11が取付けられる。
【0022】
上送り台ガイド11は左右方向Bに延びる軸線L3まわりにピン18によって角変位自在に連結され、これによって上送り台ガイド11および上送り台ガイド腕12の先端部に支持される上送り台10は軸線L3を中心として上下に揺動可能に設けられる。
【0023】
上送り台ガイド腕12の挿通孔にはミシンのフレームに支持されるブッシュ14の先端部が嵌まり込み、これによって上送り台ガイド腕12は軸線L2を中心として角変位自在に支持される。
【0024】
上送り台ガイド腕12の上方に配置される上送り揚げ軸21は左右B方向に延び、軸線L4まわりに回転自在に軸受け90に軸支される。この軸受け90はミシンフレーム80(図4参照)に固定される。上送り揚げ軸21の一端部には上送り揚げ軸レバー22の下端が、軸線L4まわりの角変位が阻止された状態で固定され、他端部には回動片20の下端部が一体に固定される。
【0025】
上送り台ガイド腕12のレバー部16の上端部は左方に屈曲して屈曲部91が形成され、この屈曲部91に回動片20の上端部が対向配置される。したがって、上送り揚げ軸レバー22が矢符C方向(図1,2の左から見て反時計まわり)に回動すると、これにともなって回動片20も矢符C方向に回動し、上端部が上送り台ガイド腕12の前記屈曲部91を押圧し、これによって上送りガイド腕12も矢符C方向に回動する。
【0026】
押え腕2の基端部には左右方向Bに延びる押え軸2Aの一端部が固定される。押え軸2Aは前記軸線L2に沿って延び、左リフトレバー25を介して前記ブッシュ14に挿通され、これによって押え腕2は軸線L2を中心として上下に揺動可能に支持される。左リフトレバー25は、押え軸2Aまわりの回転が阻止された状態で押え軸2Aに固定され、上部に形成される係合部26が上送り台ガイド腕12のレバー部16の手前側に係合し、これによって押え腕2の矢符C方向の角変位が上送り台ガイド12に伝達される。
【0027】
ブッシュ14から突出する押え軸2Aの他端部側にはねじりばね30、押え軸レバー31を介して右リフトレバー32が固定される。右リフトレバー32は押え軸2Aまわりの回転が阻止された状態で押え軸2Aに固定され、押え軸レバー31は上部に設けられる係合部33が右リフトレバー32に係合し、これによって押え軸レバー31の前記矢符C方向の回転が押え軸2Aに伝達される。ねじりばね30は押え軸レバー31を前記矢符Cと反対方向に回転させる向きにばね力を与える。
【0028】
上送り台10の後端部には上送り前後リンク35を介して上送り前後軸36が連結される。上送り前後リンク35の一端部はピン37を介して上送り台10の後端部にピン結合され、上送り前後リンク35の他端部は上送り前後軸36の一端部に設けられるクランク39にピン結合される。上送り前後軸36の他端部にはスライダレバー38が上送り前後軸36の軸線まわりの回転が阻止された状態で固定される。したがって、図1で矢符Dで示すようにスライダレバー38を前後に揺動することによって上送り台10が前後(布送り方向A)に変位する。
【0029】
上送り台ガイド11は、上送り上下リンク40を介して上送り上下軸41に連結される。上送り上下リンク40の一端部は上送り台ガイド11にピン結合され、他端部は上送り上下軸41の一端部に設けられるクランク42にピン結合される。上送り上下軸41の他端部には上送り上下レバー43が上送り上下軸41の軸線まわりの回転が阻止された状態で固定される。この上送り上下レバー43に形成される長孔46には上下レバーピン45が嵌まり込み、この上下レバーピン45は、上下レバーリンク44の一端部に結合される。したがって、図1で矢符Eで示すように上下レバーリンク44を上下変位することによって上送り台ガイド11は軸線L3を中心として上下に揺動し、これに伴って上送り台10および上送り歯5が上下に往復動する。
【0030】
したがって、前述した上送り前後軸36によって上送り歯5は前後方向に往復動し、上送り上下軸41によって上送り歯5は上下方向に往復動するので、これらの動きが合成されて上送り歯5は押え金1の透孔4内で楕円運動を行うことになる。このように上送り歯5が楕円運動することによって、前述した下送り歯と協働して布送り動作を行うことができる。
【0031】
押え腕2の前端部には上方から押え棒50が嵌まり込む。押え棒50は下端部に嵌合凹所54が形成され、この嵌合凹所54に押え腕2が嵌まり込む。これによって、押え腕2の左右方向Bへの揺動がロックされる。また押え腕50は上方に設けられる押えばね51から下方にばね力が与えられ、これによって押え金1は針板3に押付けられる。押えばね51の上部にはロックナット52を介して押えばね調整ねじ53が設けられ、この押えばね調整ねじ53によって押えばね51のばね力を調整することができる。
【0032】
上送り台ガイド11は上方から上送り台押え棒60によって押えられる。上送り台押え棒60の上方には送り押えばね部材である上送り押えばね61が設けられ、このばね力によって上送り歯5は下方にばね付勢され、下送り歯との間で生地を弾発的に挟持する。上送り台押え棒60の上にはロックナット62および調整ねじ63が介在され、この調整ねじ63によって上送り押えばね61のばね力を調整することができる。
【0033】
このように、押え金1は押えばね51からのばね力によって下方にばね付勢されており、上送り歯5は上送り押えばね61のばね力によって下方にばね付勢されている。したがって、たとえば縫製開始時など押え金1と針板3との間に生地を挟む場合には、押え金1および上送り歯5を上方に押し上げる必要がある。そのために図1に示すように、押え揚げレバー装置64が設けられる。
【0034】
押え揚げレバー装置64は前述した押え軸レバー31に連結され、チェーンなどを介してペダル操作で押え軸レバー31を下方に押し下げることができる。押え軸レバー31を下方に押し下げると右リフトレバー32を介して押え軸2Aが矢符C方向に回動し、これによって押え腕2が押えばね51のばね力に抗して上方に変位し、押え金1が上方に持ち上がる。また押え軸2Aに固定される左リフトレバー25を介して上送り台ガイド腕12も矢符C方向に回動し、これによって上送り歯5もばね力に抗して上方に持ち上がる。
【0035】
しかし、針交換などのメンテナンス時には押え金1および上送り歯5を上方に変位するだけでなく、押え腕2を軸線L1まわりに左方に揺動させて押え金1を退避させる必要がある。押え金1の透孔4には上送り歯5が挿入され、押え腕2は押え棒50でロックされているので、押え腕2を揺動させるには、上送り歯5とともに押え棒50を上方に押し上げ、押え棒50によるロック状態を解除する必要がある。
【0036】
したがって本発明のミシンでは押え棒50および送り歯支持部材15を上方に押し上げて保持する押し上げ位置と、押え棒50および送り歯支持部材15への押し上げ力を解除する押し上げ解除位置の2位置に安定して保持する2位置安定手段70が設けられる。
【0037】
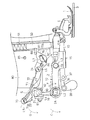
図3はミシンの左方から見た押し上げ解除位置にある2位置安定手段70を示す正面図であり、図4はこのときの2位置安定手段70の一部を切欠いて示す正面図であり、図5は押し上げ位置にあるときの2位置安定手段70を示す正面図であり、図6はこのときの2位置安定手段70の一部を切欠いて示す正面図である。
【0038】
2位置安定手段70は上送り揚げ軸レバー22、手揚げリンク71および手揚げ72を有し、手揚げリンク71は第1リンクとして機能し、手揚げリンク71の一端部が手揚げ72の中間部にねじ74によって軸線L6まわりに角変位自在にピン結合される。この手揚げ72の結合部から手揚げ72の先端部(図3の上端部)が操作部材として機能し、ピン結合部よりも図3における下方が第2リンクとして機能する。この手揚げ72の下端部72aは手揚げ止ねじ75によって軸線L7まわりに角変位自在にフレーム80にピン結合される。また手揚げリンク71の他端部71aと上送り揚げ軸レバー22の上端部とがねじ73によって軸線L5まわりに角変位自在にピン結合される。また、上送り揚げ軸レバー22の下端部は前述したように上送り揚げ軸21に固定され、この上送り揚げ軸21はミシンフレーム80に固定される軸受け90に回転自在に軸支される。これらの軸線L4〜L7はそれぞれ左右方向Bに延び互いに平行である。また、上送り揚げ軸21には前述したように、回動片20の下端部が固定され、上送り台ガイド腕12のレバー部16の屈曲部91に回動片20の上端部が対向配置される。
【0039】
図4に示すように、レバー部16の上端部には上送り歯調整ねじ82がロックナット81に螺合して固定される。この上送り歯調整ねじ82の頭部に対向する位置には当接部材77がミシンのフレーム80に固定されている。前述したように、上送り台押え棒60および上送り押えばね61によって送り歯支持部材15は下方にばね付勢され、上送り台ガイド腕12は軸線L2を中心として矢符F方向(図4〜7において時計回り)にばね力が与えられる。2位置安定手段70の押し上げ解除位置においては図4に示すように上送り歯調整ねじ82の頭部がフレーム80の当接部材77に当接し、送り歯支持部材15の矢符F方向の角変位が阻止され、これによって上送り歯5の下限位置が規定される。すなわち、上送り歯調整ねじ82の頭部を図4において左方に変位させることによって上送り歯5の下限位置を下げることができ、逆に上送り歯調整ねじ82の頭部を図4において右方に変位させることによって上送り歯5の下限位置を上げることができる。このようにして、上送り歯5と下送り歯との間隙を調整することができ、生地の厚みなどに応じて上送り歯5と下送り歯との挟持力を適宜調整することができる。
【0040】
上送り歯5と下送り歯との間に生地が介在される状態では生地の厚みによっては上送り歯5が上方に持ち上がり、これによって上送り歯調整ねじ82の頭部と当接部材77との間に隙間が形成されることになる。したがって図4に示すように、2位置安定手段70が押し上げ解除位置にあり、上送り歯5と下送り歯との間に生地が介在されない場合には上送り歯調整ねじ82の頭部がフレーム80の当接部材77に当接し、上送り揚げ軸21は定位置に保持され、上送り押えばね61からのばね力は2位置安定手段70の上送り揚げ軸レバー22、手揚げリンク71および手揚げ72には伝達されない。
【0041】
手揚げ72の下端部の手揚げ止ねじ75には捩りばねから成る操作部材押圧ばね部材である手揚げ戻しばね76が介在され、この手揚げ戻しばね76によって手揚げ72には軸線L7を中心として時計まわりにばね力が与えられ、図4に示すようにフレーム80に取付けられるストッパ85に手揚げ72が係止されて位置決めされている。このようにして、2位置安定手段70が押し上げ解除位置にあるときには、手揚げ72が立ち上がった状態に保持される。
【0042】
手揚げ72の下端部72aには軸線L7を中心として前方(図4〜6の左方)に突出する突部87が形成され、この突部87の上方には押え棒50に対して上下方向への変位が阻止されて押え棒50に嵌まり込む嵌合片88が設けられる。
【0043】
2位置安定手段70を押し上げ位置に変位させるには、手揚げ72の上端部を手揚げ戻しばね76のばね力に抗して下方に下げる。すると、前記突部87が嵌合片88に当接し、さらに手揚げ72を押し下げると嵌合片88を介して押え棒50が押えばね51のばね力に抗して上方に押し上げられる。これによって押え腕2のロック状態が解除される。
【0044】
一方この時、手揚げ72にねじ74によってピン結合される手揚げリンク71は後方(図4〜6において左方)に押され、これに連動して上送り揚げ軸レバー22が上送り揚げ軸21を角変位中心として矢符G(図4において反時計回り)に角変位する。上送り揚げ軸レバー22が矢符G方向に角変位すると、上送り揚げ軸レバー22に固定される上送り揚げ軸21および回動片20も矢符G方向に回動し、回動片20の上端部が上送り台ガイド腕12のレバー部16の屈曲部91に当接する。すると上送り台ガイド腕12が矢符C方向に角変位し始め、上送り歯調整ねじ82が当接部材77から離反し始める。
【0045】
上送り歯調整ねじ82が当接部材77から離反するとき、上送り台ガイド腕12、上送り揚げ軸レバー22を介して手揚げリンク71には、手揚げリンク71の一端部71aと手揚げ72の下端部72aとが相互に近接する向きに上送り押えばね61からばね力が作用する。したがって、手揚げ72と手揚げリンク71との結合部の軸線L6が、前記軸線L5と軸線L7とを結ぶ基準直線Sに関して上方にあるときには前記ばね力によって軸線L6はさらに上方、すなわち手揚げ72を上方に戻す方向にばね力が作用する。
【0046】
このばね力に抗して手揚げ72をさらに押し下げ、軸線L6が前記基準直線Sの下方に達すると、手揚げリンク71の一端部71aと手揚げ72の下端部72aとを相互に近接させるばね力は、手揚げ72と手揚げリンク71との結合部を基準直線Sから離反する向き、すなわち手揚げ72を下方へ押し下げる力が作用する。図4〜図6に示すように、基準直線Sの下方にはストッパ86がフレーム80に取り付けられ、手揚げ72はこのストッパ86に係止されて2位置安定手段は図5,6に示す押し上げ位置に保持される。このようにして2位置安定手段は、上送り押えばね61のばね力を利用して押し上げ位置に安定して保持される。
【0047】
このとき図5,6に示すように手揚げ72の下端部の突部87が嵌合片88を介して押え棒50を上方に持ち上げ、押え棒50の下端部の嵌合凹所54が押え腕2から離反したロック解除位置に保持される。また前述したように上送りガイド腕12が上送り押えばね61のばね力に抗して矢符D方向に角変位することによって上送り歯5が押え金1の透孔4から上方に持ち上がる。したがって、押え腕2を左方に揺動させて押え金1を退避させることができる。
【0048】
このように本発明の2位置安定手段70では手揚げ72をストッパ86に当接するまで下方に押し下げることによって、上送り押えばね61のばね力を利用して押え棒50および上送り歯5を上方に押し上げた状態に保持することができるので、片手で手揚げ72を押し下げ、この片手で押え腕2を左方に揺動させて押え金1を退避させるといったことができ、メンテナンスなどを容易に行うことができる。
【0049】
メンテナンス終了後、押え金1を元に戻す場合には、操作者は押え腕2を右方に揺動させて押え金1を所定の位置に片手で戻し、その後、手揚げ72を上送り押えばね61のばね力に抗して上方に持ち上げることによって、手揚げ72の突部87が下方に変位して押え棒50に作用していた押し上げ力が解除され、押え棒50が下方のロック位置まで変位して嵌合凹所54が押え腕2に嵌まり込み、押え腕2をロックする。これとともに上送り台ガイド腕12は上送り歯調整ねじ82が当接部材77に当接するまで矢符F方向に角変位し、上送り歯5が押え金1の透孔4に挿入される。
【0050】
上送り歯調整ねじ82が当接部材77に当接した状態では上送り押えばね61のばね力は手揚げ72には作用しないが、手揚げ戻しばね76は常に手揚げ72を上方に変位させる方向にばね力を付与しているので、これによって手揚げ72はストッパ85に当接して支持される。このようにして、2位置安定手段70は押し上げ解除位置に保持される。
【0051】
図7は、2位置安定手段70のスケルトン図である。本実施形態での寸法の一例を示すと、軸線L7−L6間は22mmであり、軸線L6−L5間が64mmであり、軸線L5−L4間が31mmであり、軸線L4−L7間が64mmであり、回動片20の長さは9.7mmであり、レバー部16の上端部と軸線L2との距離は38.5mmであり、軸線L2から上送り歯5の先端までの距離は130〜145mmである。また、上送り歯5の上下変位量は、前述した上送り前後軸36および上送り上下軸41の作用および上送り押えばね61の負荷によって決まり、たとえば5〜9mmとなる。
【0052】
また、2位置安定手段70は手揚げ72が下方となる押し上げ位置では軸線L6は基準直線S近傍にあるが、通常時の押し上げ解除位置では軸線L6が基準直線Sから大きく離反する位置まで手揚げ72は手揚げ戻しばね76によって持ち上げられている。すなわち、押え腕2のロック状態を解除するには大きく手揚げ72を回動させなければならず、誤ってロック解除状態になるといったことが確実に防がれる。
【0053】
本発明は上送り揚げ軸レバー22と上送り台ガイド腕12のレバー部16とを上送り揚げ軸21で角変位自在に連結する構成に限らず、図8の他の実施形態に示すように、上送り揚げ軸レバー22と上送り台ガイド腕12のレバー部16とが一体と成るように構成してもよい。これによって2位置安定手段の構成が簡単となる。
【0054】
なおこのときの2位置安定手段の寸法の一例を述べると、軸線L7−L6間が19.5mmであり、軸線L6−L5間が80mmであり、軸線L5−L2間が84.5mmであり、軸線L2と上送り歯の先端部との間の距離が130〜145mmであり、上送り歯の上下移動量は前述と同様に5〜9mm程度となる。
【0055】
【発明の効果】
請求項1記載の本発明によれば、2位置安定手段によってロック部材をロック解除位置に保持するとともに、上送り歯を上方に上げた状態に保持することができるので、操作者は片手で容易に押え腕を揺動させて押え金を退避させることができ、メンテナンスなどを容易に行うことができる。
【0056】
また操作部材を安定させるためのばね力を得るために、送り押えばね部材を利用することによって、2位置安定手段用に強力なばね部材を別途に設ける必要がない。さらに上送り歯の位置調整によって、送り押えばね部材のばね力が2位置安定手段に与えられない場合には、操作部材押圧ばね部材によって操作部材がばね付勢され、操作部材が他方側に安定して保持される。このように簡単な構成で、2位置に確実に安定させることができる、2位置安定手段を実現することができる。
【図面の簡単な説明】
【図1】本発明の実施の一形態であるミシンの押え腕2および上送り機構の構成を示す斜視図である。
【図2】押え腕2および上送り機構の構成を示す分解斜視図である。
【図3】2位置安定手段70の押し上げ解除位置を示す正面図である。
【図4】押し上げ解除位置にある2位置安定手段70の一部を切欠いて示す示す正面図である。
【図5】押し上げ位置にある2位置安定手段70を示す正面図である。
【図6】押し上げ位置にある2位置安定手段70の一部を切欠いて示すを示す正面図である。
【図7】2位置安定手段70のスケルトン図である。
【図8】本発明の他の実施形態の2位置安定手段のスケルトン図である。
【符号の説明】
1 押え金
2 押え腕
4 透孔
5 上送り歯
15 送り歯支持部材
50 押え棒
61 上送り押えばね
70 2位置安定手段
71 手揚げリンク
72 手揚げ
Claims (1)
- 針板(3)と、
基端部が針板(3)の後方で変位自在に支持され、先端部が針板(3)まで延び、上下および左右方向に揺動可能に設けられる押え腕(2)と、
押え腕(2)の上方に配置され、押え腕(2)の左右の揺動を阻止するロック位置と、ロック位置の上方のロック解除位置とにわたって上下に変位自在に支持され、ロック位置にあるとき押え腕(2)を下方にばね付勢するロック部材(50)〜(53)と、
透孔(4)を有し、押え腕(2)の先端部に取り付けられ、ロック位置にあるロック部材(50)〜(53)によって針板(3)に弾発的に押え付けられる押え金(1)と、
押え金(1)の上から前記透孔(4)に挿通される上送り歯(5)と、
先端部に上送り歯(5)が取り付けられ、上下に揺動自在に支持される送り歯支持部材(15)と、
送り歯支持部材(15)を下方にばね付勢する送り押えばね部材(61)とを備えるミシンにおいて、
第1リンク(71)と、第1リンク(71)の一端部に一端部がピン結合される第2リンクと、第1リンク(71)または第2リンクに固定される操作部材(72)とを有する2位置安定手段(70)を備え、
2位置安定手段(70)は、予め定める基準位置を超えて一方側から他方側に操作部材(72)を変位させると、他方側に操作部材(72)がばね力によって保持され、前記基準位置を超えて他方側から一方側に操作部材(72)を変位させると、一方側に操作部材(72)がばね力によって保持される構成であり、
操作部材(72)が基準位置を超えるときは、第1リンクの他端部(71a)と第2リンクの他端部(72a)とを結ぶ基準直線(S)を第1リンク(71)と第2リンク(72)との結合部が超えて移動することであり、
前記基準位置を超えて操作部材(72)が一方側に変位されると、2位置安定手段(70)からロック部材(50)〜(53)および送り歯支持材(15)に押し上げ力が作用し、ロック部材(50)がばね力に抗してロック解除位置まで変位するとともに、送り歯支持部材(15)がばね力に抗して上方に押し上げられ、
前記基準位置を超えて操作部材(72)が他方側に変位されると、2位置安定手段(70)からロック部材(50)および送り歯支持部材(15)に作用する押し上げ力が解除され、
少なくとも前記結合部が前記基準直線近傍にあるときおよび操作部材(72)が一方側にあるときには、第1リンクの他端部(71a)と第2リンクの他端部(72a)とを相互に近接させる向きに、送り押えばね部材(61)からばね力が与えられ、
少なくとも操作部材(72)が他方側にあるときには、操作部材(72)を一方側から他方側へ変位させる向きに、送り押えばね部材(61)とは異なる操作部材押圧ばね部材(76)からばね力が与えられることを特徴とするミシン。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP17971199A JP4106507B2 (ja) | 1999-06-25 | 1999-06-25 | ミシン |
| TW89108734A TW475016B (en) | 1999-06-25 | 2000-05-08 | Sewing machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP17971199A JP4106507B2 (ja) | 1999-06-25 | 1999-06-25 | ミシン |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001000765A JP2001000765A (ja) | 2001-01-09 |
| JP2001000765A5 JP2001000765A5 (ja) | 2005-07-14 |
| JP4106507B2 true JP4106507B2 (ja) | 2008-06-25 |
Family
ID=16070547
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP17971199A Expired - Fee Related JP4106507B2 (ja) | 1999-06-25 | 1999-06-25 | ミシン |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4106507B2 (ja) |
| TW (1) | TW475016B (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6009386B2 (ja) * | 2013-03-27 | 2016-10-19 | ペガサスミシン製造株式会社 | ミシンの上送り台上下駆動機構 |
| CN103215755A (zh) * | 2013-04-17 | 2013-07-24 | 吴江市菀坪宝得利缝制设备机械厂 | 一种波浪缝压脚送步凸轮 |
| KR102375390B1 (ko) * | 2022-01-18 | 2022-03-17 | 주식회사 제이케이글로벌 | 원료 자동 공급장치 |
-
1999
- 1999-06-25 JP JP17971199A patent/JP4106507B2/ja not_active Expired - Fee Related
-
2000
- 2000-05-08 TW TW89108734A patent/TW475016B/zh not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| TW475016B (en) | 2002-02-01 |
| JP2001000765A (ja) | 2001-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101628348B (zh) | 台式切割机 | |
| JP2007307275A (ja) | ミシン用上送り装置 | |
| JP4106507B2 (ja) | ミシン | |
| DE2361989C2 (de) | Sprungstichmechanismus für eine Zick- Zack-Nähmaschine | |
| CH681160A5 (ja) | ||
| JP2000279671A (ja) | ミシンの布押え装置 | |
| JP4435379B2 (ja) | 穴かがりミシンの布切り装置 | |
| DE2415737A1 (de) | Naehmaschine insbesondere zickzacknaehmaschine | |
| JP4860179B2 (ja) | ミシンの押え装置 | |
| TW201636471A (zh) | 縫紉機之壓腳調整機構 | |
| CN1904176A (zh) | 嵌条缝纫机 | |
| DE7535391U (de) | Naehmaschine mit sperrvorrichtung | |
| JPH119867A (ja) | ミシンの送り歯高さ位置調節装置 | |
| JP3737044B2 (ja) | ミシンのボビン交換装置 | |
| JP2007075253A (ja) | 片針切り替え装置 | |
| JPH05153Y2 (ja) | ||
| JP5059482B2 (ja) | 玉縁縫いミシン | |
| JP3301863B2 (ja) | 上送り機構を備えた偏平縫いミシン | |
| JP3846358B2 (ja) | 縫製装置用ベルトループ片供給装置 | |
| JP2550836Y2 (ja) | ミシンの布押え装置 | |
| JP6009386B2 (ja) | ミシンの上送り台上下駆動機構 | |
| JP3867873B2 (ja) | ミシンの送り歯駆動装置 | |
| JP2722777B2 (ja) | 穴かがりミシンの布開き装置 | |
| US6205941B1 (en) | Chain stitch sewing machine including a needle-thread pushing member | |
| JP3988124B2 (ja) | 縫製装置用ベルトループ片供給装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041118 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041118 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050628 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051004 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051130 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20061003 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061102 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20061208 |
|
| A912 | Removal of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20070119 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080207 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080318 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110411 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120411 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130411 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140411 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |