JP4075771B2 - 推定装置、自動楽器およびプログラム - Google Patents
推定装置、自動楽器およびプログラム Download PDFInfo
- Publication number
- JP4075771B2 JP4075771B2 JP2003374315A JP2003374315A JP4075771B2 JP 4075771 B2 JP4075771 B2 JP 4075771B2 JP 2003374315 A JP2003374315 A JP 2003374315A JP 2003374315 A JP2003374315 A JP 2003374315A JP 4075771 B2 JP4075771 B2 JP 4075771B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- sample
- weighting factor
- key
- sigma
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10F—AUTOMATIC MUSICAL INSTRUMENTS
- G10F1/00—Automatic musical instruments
- G10F1/02—Pianofortes with keyboard
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Acoustics & Sound (AREA)
- Multimedia (AREA)
- Electrophonic Musical Instruments (AREA)
Description
この発明は上述した事情に鑑みてなされたものであり、直近のサンプリング値の正確な推測値を少ない演算量で得る推定装置、自動楽器およびプログラムを提供することを目的としている。
請求項1記載の推定装置にあっては、移動物体(70)の位置または速度を推定する推定装置であって、前記移動物体(70)の位置を測定するセンサ(25)と、前記センサからの情報を定期的にサンプリングするサンプリング手段(SP4,SP6)と、該サンプリング手段でサンプリングされたサンプル値を、予め定めた所定サンプル数記憶する第1の記憶手段(RAM54,位置記憶レジスタy0〜y6)と、前記所定サンプル数によって決定される重み係数であって、前記位置の近似値を求める位置近似多項式(yj=a*tj 2 +b*tj+c)における該位置の近似値(yj)と複数の前記サンプル値(xj)との自乗誤差(E=SIGMA(xj-yj) 2 )を最小にする、前記位置近似多項式の係数(a,b,c)に基づいて定められた(wXjについては、段落0012〜0015、wVjについては段落0009〜0011)重み係数(wXj,wVj)を記憶する第2の記憶手段(フラッシュROM52)と、該第2の記憶手段から前記重み係数を読み出す読出し手段(CPU50,段落0045〜0046)と、前記サンプル値と前記重み係数とを乗算し、これらの乗算結果を加算することによって前記移動物体のサンプル点終端の位置または速度を推定する演算手段(CPU50,段落0045〜0046)とを具備することを特徴とする。
また、請求項2記載の自動楽器にあっては、駆動されることによって楽音を発生させる複数の操作子(70)と、前記各操作子(70)毎に設けられ、供給された駆動信号に応じてこれら操作子を駆動する複数のアクチュエータ(10)と、前記各操作子毎に設けられ、これら操作子の変位を測定し、該測定された変位を表す検出信号を出力する複数のセンサ(25)と、供給された演奏情報に従って、前記各操作子の軌道リファランスを決定する軌道リファランス決定手段(110)と、各々の前記操作子(70)について、複数回に渡る前記検出信号のサンプル値(位置記憶レジスタy0〜y6)と該サンプル値の数によって決定される所定の重み係数(wVj,wXj)との積の加算結果を計算することによって、サンプル点終端における位置または速度の推測値である終端推測値(X,V)を決定する終端推測値決定手段(120)であって、前記重み係数(wVj,wXj)は、前記変位の近似値を求める変位近似多項式(yj=a*tj 2 +b*tj+c)における該変位の近似値(yj)と複数の前記サンプル値(xj)との自乗誤差(E=SIGMA(xj-yj) 2 )を最小にする、前記変位近似多項式の係数(a,b,c)に基づいて定められた(wXjについては、段落0012〜0015、wVjについては段落0009〜0011)重み係数(wVj,wXj)である、終端推測値決定手段(120)と、逐次計算される前記終端推測値が、前記軌道リファランスに基づく目標値に近づくように前記駆動信号を出力する駆動信号出力手段(120,30)とを具備することを特徴とする。
また、請求項3記載のプログラムにあっては、処理装置(50)を有し、移動物体(70)の位置を測定するセンサ(25)からの情報に基づいて該移動物体(70)の位置または速度を推定する推定装置に適用されるプログラムであって、前記センサからの情報を定期的にサンプリングするサンプリング過程(SP4,SP6)と、該サンプリング過程でサンプリングされたサンプル値を、予め定めた所定サンプル数だけ第1の記憶手段(RAM54,位置記憶レジスタy0〜y6)に記憶する過程と、前記所定サンプル数によって決定される重み係数であって、前記位置の近似値を求める位置近似多項式(yj=a*tj 2 +b*tj+c)における該位置の近似値(yj)と複数の前記サンプル値(xj)との自乗誤差(E=SIGMA(xj-yj) 2 )を最小にする、前記位置近似多項式の係数(a,b,c)に基づいて定められた(wXjについては、段落0012〜0015、wVjについては段落0009〜0011)重み係数(wXj,wVj)を第2の記憶手段(フラッシュROM52)から読み出す読出し過程(段落0045〜0046)と、前記サンプル値と前記重み係数とを乗算し、これらの乗算結果を加算することによって前記移動物体のサンプル点終端の位置または速度を推定する演算過程(CPU50,段落0045〜0046)とを前記処理装置(50)に実行させることを特徴とする。
また、請求項4記載のプログラムにあっては、駆動されることによって楽音を発生させる複数の操作子(70)と、前記各操作子(70)毎に設けられ、供給された駆動信号に応じてこれら操作子を駆動する複数のアクチュエータ(10)と、前記各操作子毎に設けられ、これら操作子の変位を測定し、該測定された変位を表す検出信号を出力する複数のセンサ(25)と、処理装置(50)とを有する自動楽器に適用されるプログラムであって、供給された演奏情報に従って、前記各操作子の軌道リファランスを決定する軌道リファランス決定過程(110)と、各々の前記操作子(70)について、複数回に渡る前記検出信号のサンプル値(位置記憶レジスタy0〜y6)と所定の重み係数(wVj,wXj)との積の加算結果を計算することによって、サンプル点終端における位置または速度の推測値である終端推測値(X,V)を決定する終端推測値決定過程(120)であって、前記重み係数(wVj,wXj)は、前記位置の近似値を求める位置近似多項式(yj=a*tj 2 +b*tj+c)における該位置の近似値(yj)と複数の前記サンプル値(xj)との自乗誤差(E=SIGMA(xj-yj) 2 )を最小にする、前記位置近似多項式の係数(a,b,c)に基づいて定められた(wXjについては、段落0012〜0015、wVjについては段落0009〜0011)重み係数(wVj,wXj)である、終端推測値決定過程(120)と、前記終端推測値と、前記軌道リファランス上の対応する目標値との差に基づいて前記駆動信号を出力する駆動信号出力過程(120)とを前記処理装置(50)に実行させることを特徴とする。
1.1.サンプルの中心点での推測
雑音成分を含んだ測定波形からn個のサンプル値xj(j=-m〜m)を一定のサンプリング周期でサンプルした場合において、n個のサンプル値xjは時刻tを変数とするP次多項式により近似される。一例として、押鍵深さを以下の2次多項式(1次多項式も含む。その場合はa=0)で近似する。
y = a*t2 + b*t + c
ここで、係数a,b,cを、該2次多項式とサンプル値との自乗誤差を最小にするようにして算出する。たとえば、サンプル時刻 tj における測定値をxj とると、そのときの2次多項式の値yjは、
yj= a*tj2 + b*tj + c
となる。このとき、自乗誤差 E は
E = SIGMA(xj - yj )2 = SIGMA(xj - a*tj2 - b*tj - c)2
であり、自乗誤差 E を最小にするように各係数a,b,cの値が求められる。
すなわち、∂E/∂a = 0 を満たすように a の値が求められる。同様に ∂E/∂b = 0、 ∂E/∂c = 0 を満たすようにb,cの値が求められる。ここで、
m
Σ を「SIGMA」と略記している。さらに、各係数a,b,cは、
j=-m
(SIGMA(wj*xj))/W [1]
の積和演算の形式に変形される。すなわち、重み係数wjとサンプル値xjとの積和演算の結果を正規化定数Wで除した形式に変形され、サンプル点の中央すなわちj=0における鍵軌道が推測される。ここで、jはサンプル番号( -m,…,0,…,m)であり、サンプル数は、n=2m+1である。
a = (SIGMA(waj*xj))/Wa [2]
Wa = T2*m(m+1)(2m+1)(2m+3)(2m-1)/15 [3]
waj = 3j2 - m2 - m
= 3j2-m(m+1) [4]
係数 b は
b = (SIGMA(wbj*xj))/Wb [5]
Wb = T*m(m+1)(2m+1)/3 [6]
wbj = j [7]
係数 c は
c = (SIGMA(wcj*xj))/Wc [8]
Wc = (2m+1)(2m+3)(2m-1)/3 [9]
wcj = 3m2 + 3m - 1 - 5j2
= -5j2+3m(m+1)-1 [10]
である。ここで、Tはサンプル周期である。なお、このときの係数cの値が、j=0における押鍵深さの推測値である。
A 加速度の推測値
Vc サンプル点中央(j=0)における速度推測値
V サンプル点終端(j=m)における速度推測値
Xc サンプル点中央(j=0)における位置推測値
X サンプル点終端(j=m)における位置推測値
とすると、これらと各係数との関係は
A = 2a [11]
Vc = b [12]
Xc = c [13]
V = Vc + A*m*T = b + 2a*m*T [14]
X = Xc + Vc*m*T + A/2*(m*T)2 = c + b*m*T + a(m*T)2 [15]
である。すなわち、サンプル点中央(j=0)およびサンプル点終端(j=m)における推測値が、最小自乗近似により求められた係数a,b,cおよびサンプル周期Tにより算出される。
さらに、複数のサンプル点の終端すなわち直近の値であるj=mにおける速度推測値Vが、サンプル点中央における速度推測値Vc = b を用いて以下のように算出される。
[2][5][14]式より
V = b + 2a*m*T
= (SIGMA(wbj*xj))/Wb + 2 (SIGMA(waj*xj))/Wa *m*T
が得られる。第一項も第二項も何れもSIGMAの加算範囲は−mからmであるので、SIGMA内の各項がまとめられる。よって、以下の式が得られる。
V = SIGMA( (wbj*xj)/Wb + 2waj*xj/Wa*m*T )
= SIGMA( (wbj*Wa/T2 + 2waj*m*Wb/T)*xj ) / (WbWa/T2) [21]
分母 = T*m(m+1)(2m+1)/3 * T2*m(m+1)(2m+1)(2m+3)(2m-1)/15 /T2
= T*m2(m+1)2(2m+1)2(2m+3)(2m-1)/45 [22]
分子 = SIGMA( (j * T2*m(m+1)(2m+1)(2m+3)(2m-1)/15 /T2
+ 2 (3j2-m(m+1))* m* T*m(m+1)(2m+1)/3 /T)*xj )
= m(m+1)(2m+1)/15*SIGMA( (30mj2 + (2m+3)(2m-1)j - 10m2(m+1))*xj ) [23]
になる。したがって、 V は、
V = SIGMA((30mj2+(2m+3)(2m-1)j-10m2(m+1))*xj)
/ (T*m(m+1)(2m+1)(2m+3)(2m-1)/3) [24]
と変形され、サンプル点終端における速度推測値が求められる。
V = (SIGMA(wVj*xj))/WV [25]
WV = T*m(m+1)(2m+1)(2m+3)(2m-1)/3 [26]
wVj = 30mj2+(2m+3)(2m-1)j-10m2(m+1) [27]
となり、[1]と同じ積和演算の形式に変形される。ここで、重み係数wVjの値と正規化定数WVの値とを図1に示す。図において、横方向はmの値および対応する正規化定数WVの値である。mの値はm=2,3,4,…であり、サンプル点の数を表している。縦方向は、サンプル点jに対応する重み係数wVjである。これらの値をテーブルとして保持することにより、サンプル値xjとの積和演算によりサンプル値終端での押鍵速度Vが算出される。なお、最下欄は、mの値に対応する重み係数wVjの和の値を示す。
次に、j=mにおける押鍵深さXは、[2][5][8][15]式より
X = c + b*m*T + a(m*T)2
= (SIGMA(wcj*xj))/Wc + (SIGMA(wbj*xj))/Wb *m*T + (SIGMA(waj*xj))/Wa *(m*T)2
と表される。第一項から第三項まで何れもSIGMAの加算範囲は−mからmであり、同一であるので、SIGMA内の各項がまとめられる。
よって、次式が得られる。
X = SIGMA( (wcj*xj))/Wc + (wbj*xj)/Wb*m*T + (waj*xj))/Wa*(m*T)2 )
= SIGMA( (wcj*WbWa/T3 + wbj*m*WcWa/T2 + waj*m2*WcWb/T)*xj )/ (WcWbWa/T3)
[31]
分母= (2m+1)(2m+3)(2m-1)/3 * T*m(m+1)(2m+1)/3 * T2*m(m+1)(2m+1)(2m+3)(2m-1)/15 /T3= m2(m+1)2(2m+1)3(2m+3)2(2m-1)2/135 [32]
分子=SIGMA( ((-5j2+3m(m+1)-1) * T*m(m+1)(2m+1)/3 * T2*m(m+1)(2m+1)(2m+3)(2m-1)/15/T3+ j *m* (2m+1)(2m+3)(2m-1)/3 * T2*m(m+1)(2m+1)(2m+3)(2m-1)/15/T2+ (3j2-m(m+1)) *m2* (2m+1)(2m+3)(2m-1)/3 * T*m(m+1)(2m+1)/3 /T )*xj )
= m2(m+1)(2m+1)2(2m+3)(2m-1)2/45*SIGMA( (5j2 + (2m+3)j - (m+1)(m-1) )*xj )
[33]
となる。
X = SIGMA((5j2+(2m+3)j-(m+1)(m-1))*xj) / ((m+1)(2m+1)(2m+3)/3) [34]
と表される。
X = (SIGMA(wXj*xj))/WX [35]
WX = (m+1)(2m+1)(2m+3)/3 [36]
wXj = 5j2+(2m+3)j-(m+1)(m-1) [37]
となり[1]式と同じ積和演算形式に変形される。ここで、mの値と重み係数wXjおよび正規化定数WXとの関係を図2に示す。
上記の各推測値は、押鍵深さを2次多項式で近似して算出したが、以下の3次多項式を用いて、さらに高精度な近似を行うことも出来る。
y = a*t3 + b*t2 + c*t + d
ここで、2次式の場合と同様に、最小自乗近似により各係数a,b,c,dが算出される。
係数 a は
a = (SIGMA(waj*xj))/Wa [42]
Wa = T3*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/35 [43]
waj = j(5j2 - 3m2 - 3m + 1)
= j(5j2-3m(m+1)+1) [44]
係数 b は
b = (SIGMA(wbj*xj))/Wb [45]
Wb = T2*m(m+1)(2m+1)(2m+3)(2m-1)/15 [46]
wbj = 3j2-m2-m
= 3j2-m(m+1) [47]
係数 c は
c = (SIGMA(wcj*xj))/Wc [48]
Wc = T*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5 [49]
wcj = j(15m4+30m3-15m+5 - (21m2+21m-7)j2)
= j(-7(3m(m+1)-1)j2+5(3m(m+1)((m+2)(m-1)+1)+1)) [50]
係数 d は
d = (SIGMA(wdj*xj))/Wd [51]
Wd = (2m+1)(2m+3)(2m-1)/3 [52]
wdj = 3m2 + 3m - 1 - 5j2
= -5j2+3m(m+1)-1 [53]
である。このときの係数dの値が、j=0における押鍵深さの推測値である。
このように、3次近似式によって求められた係数bと2次式によって求められた係数aとが等しく、3次近似式によって求められた係数dと2次式によって求められた係数cとが等しい。
J 3次微分の推測値
Ac サンプル点中央(j=0)における加速度推測値
A サンプル点終端(j=m)における加速度推測値
Vc サンプル点中央(j=0)における速度推測値
V サンプル点終端(j=m)における速度推測値
Xc サンプル点中央(j=0)における位置推測値
X サンプル点終端(j=m)における位置推測値
とすると、これらと各係数との関係は、
J = 6a [54]
Ac = 2b [55]
Vc = c [56]
Xc = d [57]
A = Ac + J*m*T = 2b + 6a*m*T [58]
V = Vc + Ac*m*T + J/2*(m*T)2= c + 2b*m*T + 3a(m*T)2 [59]
X = Xc + Vc*m*T + A/2*(m*T)2 + J/6*(m*T)3
= d + c*m*T + b(m*T)2 + a(m*T)3 [60]
である。
まず、複数のサンプル点の終端(j=m)における加速度推測値Aが、サンプル点中央における加速度推測値Ac=2bを用いて以下のように算出される。
[42][45][58]式より
A = 2b + 6a*m*T
= 2 (SIGMA(wbj*xj))/Wb + 6 (SIGMA(waj*xj))/Wa *m*T
が得られる。第一項も第二項も何れもSIGMAの加算範囲は−mからmであるので、SIGMA内の各項がまとめられる。よって、以下の式が得られる。
A = SIGMA( 2wbj*xj/Wb + 6waj*xj/Wa*m*T )
= SIGMA( (2wbj*Wa/T3 + 6waj*m*Wb/T2)*xj ) / (WbWa/T3)
[61]
分母
= T2*m(m+1) (2m+1)(2m+3)(2m-1)/15
* T3*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/35 /T3
= T2*m2(m+1)2(m+2)(m-1)(2m+1)2(2m+3)2(2m-1)2/525 [62]
分子
=SIGMA( (2 (3j2-m(m+1))
* T3*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/35 /T3
+ 6 j(5j2-(3m2+3m-1)) *m
* T2*m(m+1)(2m+1)(2m+3)(2m-1)/15 /T2)*xj )
= m(m+1)(2m+1)(2m+3)(2m-1)/105
*SIGMA( ( 6( 35mj3 + 3(m+2)(m-1)j2 - 7m(3m2+3m-1)j - m(m+1)(m+2)(m-1) )*xj ) [63]
になる。
A = SIGMA(6(35mj3 + 3(m+2)(m-1)j2 - 7m(3m2+3m-1)j - m(m+1)(m+2)(m-1))*xj)
/ (T2*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5) [64]
と変形され、サンプル値終端における加速度推測値が求められる。
A = (SIGMA(wAj*xj))/WA [65]
WA = T2*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5 [66]
wAj = 6(35mj3 + 3(m+2)(m-1)j2 - 7m(3m2+3m-1)j - m(m+1)(m+2)(m-1))
= 6(35mj3+3(m+2)(m-1)j2-7m(3m(m+1)-1)j-m(m+1)(m+2)(m-1)) [67]
となり[1]と同じ積和演算の形式に変形される。ここで、mの値を変化した場合における、重み係数wAjおよび正規化定数WAの各値を図3に示す。
次に、j=mにおける押鍵速度Vは、[42][45][48][59]式より
V = c + 2b*m*T + 3a(m*T)2
= (SIGMA(wcj*xj))/Wc + 2 (SIGMA(wbj*xj))/Wb *m*T + 3 (SIGMA(waj*xj))/Wa *(m*T)2
となる。
V = SIGMA( (wcj*xj)/Wc + 2(wbj*xj)/Wb*m*T + 3(waj*xj)/Wa*(m*T)2 )
= SIGMA( (wcj*WbWa/T5 + 2wbj*m*WcWa/T4 + 3waj*m2*WcWb/T3)*xj )
/ (WcWbWa/T5) [71]
分母
= T* m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5
* T2*m(m+1) (2m+1)(2m+3)(2m-1)/15
* T3*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/35 /T5
= T*m3(m+1)3(m+2)2(m-1)2(2m+1)3(2m+3)3(2m-1)3/2625 [72]
分子
=SIGMA( ( j(-7(3m2+3m-1)j2 + 5(3m4+6m3-3m+1))
* T2*m(m+1) (2m+1)(2m+3)(2m-1)/15
* T3*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/35 /T5
+ 2 (3j2-m(m+1)) *m
* T* m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5
* T3*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/35 /T4
+ 3 j(5j2-(3m2+3m-1)) *m2
* T* m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5
* T2*m(m+1)(2m+1)(2m+3)(2m-1)/15 /T3 )*xj )
= m2(m+1)2(m+2)(m-1)(2m+1)2(2m+3)2(2m-1)2/525
*SIGMA( 7(12m2-3m+1)j3 + 18m(m+2)(m-1)j2
+ (-48m4-33m3+21m2-15m+5)j - 6m2(m+1)(m+2)(m-1) )*xj )
[73]
が得られる。
V = SIGMA( 7(12m2-3m+1)j3 + 18m(m+2)(m-1)j2
- (48m4+33m3-21m2+15m-5)j - 6m2(m+1)(m+2)(m-1) )*xj )
/ (T*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5)
[74]
となる。
V = (SIGMA(wVj*xj))/WV [75]
WV = T*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5 [76]
wVj = 7(12m2-3m+1)j3 + 18m(m+2)(m-1)j2
- (48m4+33m3-21m2+15m-5)j - 6m2(m+1)(m+2)(m-1)
= 7(3m(4m-1)+1)j3 + 18m(m+2)(m-1)j2
- (3m(m(m(16m+11)-7)+5)-5)j - 6m2(m+1)(m+2)(m-1) [77]
となり[1]と同じ積和演算形式に変形される。ここで、mの値を変化した場合における、重み係数wVjおよび正規化係数WVの値を図4に示す。
次に、j=mにおける押鍵深さXは、[42][45][48][51][60]式より
X = d + c*m*T + b(m*T)2 + a(m*T)3
= (SIGMA(wdj*xj))/Wd + (SIGMA(wcj*xj))/Wc *m*T
+ (SIGMA(wbj*xj))/Wb *(m*T)2 + (SIGMA(waj*xj))/Wa *(m*T)3
となる。
X = SIGMA( (wdj*xj))/Wd + (wcj*xj)/Wc*m*T
+ (wbj*xj))/Wb*(m*T)2 + (waj*xj))/Wa*(m*T)3 )
= SIGMA( (wdj*WcWbWa/T6 + wcj*m*WdWbWa/T5 + wbj*m2*WdWcWa/T4
+ waj*m3*WdWcWb/T3)*xj )/ (WdWcWbWa/T6) [81]
分母
= (2m+1)(2m+3)(2m-1)/3
* T* m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5
* T2*m(m+1) (2m+1)(2m+3)(2m-1)/15
* T3*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/35 /T6
= m3(m+1)3(m+2)2(m-1)2(2m+1)4(2m+3)4(2m-1)4/7875 [82]
分子
=SIGMA( ( (-5j2+3m2+3m-1)
* T* m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5
* T2*m(m+1) (2m+1)(2m+3)(2m-1)/15
* T3*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/35 /T6
+ j(-7(3m2+3m-1)j2 + 5(3m4+6m3-3m+1)) *m
* (2m+1)(2m+3)(2m-1)/3
* T2*m(m+1) (2m+1)(2m+3)(2m-1)/15
* T3*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/35 /T5
+ (3j2-m(m+1)) *m2
* (2m+1)(2m+3)(2m-1)/3
* T* m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5
* T3*m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/35 /T4
+ j(5j2-(3m2+3m-1)) *m3
* (2m+1)(2m+3)(2m-1)/3
* T* m(m+1)(m+2)(m-1)(2m+1)(2m+3)(2m-1)/5
* T2*m(m+1)(2m+1)(2m+3)(2m-1)/15 /T3 )*xj )
= m3(m+1)2(m+2)(m-1)2(2m+1)3(2m+3)3(2m-1)4/7875
*SIGMA( ( 35j3 + 15(m+2)j2 - 5(3m2-5)j - 3(m+1)(m+2)(m-1) )*xj )
となる。
X = SIGMA( ( 35j3 + 15(m+2)j2 - 5(3m2-5)j - 3(m+1)(m+2)(m-1) )*xj )
/ ((m+1)(m+2)(2m+1)(2m+3)) [84]
と表される。
X = (SIGMA(wXj*xj))/WX [85]
WX = (m+1)(m+2)(2m+1)(2m+3) [86]
wXj = 35j3 + 15(m+2)j2 - 5(3m2-5)j - 3(m+1)(m+2)(m-1)
[87]
となり[1]と同じ積和演算形式に変形される。mの値を変化した場合における重み係数wXjおよび正規化係数WXの値を図5に示す。
2.1.ハードウェア構成
本発明の一実施例である自動演奏ピアノ(雑音除去装置)のハードウェア構成を図6に示す。
図において、10はソレノイドであり、電流制御によりプランジャ部分が軸方向に変位する。20はハンマセンサであり、一次側にフォトダイオード、二次側にフォトトランジスタを設けたフォトセンサを、2個、並列して設けたセンサである。なお、一方のフォトセンサが遮光状態になってから双方のフォトセンサが遮光状態になるまでの時間差から打弦タイミングと打弦速度とが検出される。25は変位検出型キーセンサであり、押下位置を検出して、そのデータをアナログ出力する。27はフォトセンサ型キーセンサであり、ハンマセンサと同様の原理で、キーオンタイミングと押鍵速度とを検出する。
次に、自動演奏ピアノの鍵部の概要構成を図7に示す。
図において70は鍵であり、バランスピン80によって揺動自在に支持されている。また、演奏情報記録用のキー位置センサ27は、鍵70の前方(図上右側)下面に対向して設けられている。鍵70の前方下面には、該フォトセンサ型キーセンサ27を遮光する遮光板75が鍵70の下方に向かって突出するように設けられている。15はプランジャであり、ソレノイド10の一部を構成し、ソレノイド10に供給される電流により上下方向に変位し、鍵70を駆動する。90はアクション機構であり、鍵70の運動をハンマ2に伝達する。4は弦であり、ハンマ2によって打弦される。6はダンパであり、弦4を制動する。
3.1.演奏情報記録段階
本実施例の自動演奏ピアノ100の動作は、図示しないコントローラにおける記録指示に基づき実際に演奏者が演奏を行いその演奏情報を記録する演奏情報記録段階と、図示しないコントローラにおける再生指示に基づき該演奏情報に基づいて演奏を自動的に再生する再生段階とに区分される。
演奏情報記録段階においては、操作者によって演奏が行われる。すなわち、押鍵操作に連動してハンマによる打弦が行われる。それにより、ハンマセンサ20によって打弦タイミングと打弦速度とが検出され、フォトセンサ型キーセンサ27によって、キーオンタイミングと押鍵速度とが検出される。そして、演奏記録部130により、何れの鍵を押鍵したかという情報であるキーコードと共に、これらの押鍵速度、打弦速度、キーオンタイミング、打弦タイミングが、演奏情報としてRAM54に記憶される。同様に、キーオフタイミング、離鍵速度、キーコードが記憶される。次に、記録後処理部150により、例えばイベント抜け等の不具合が修正され、その結果得られた最終的な演奏情報の全体がフレキシブルディスクに記録される。
再生段階においては、再生前処理部110により、フレキシブルディスクから演奏情報が読み込まれ、該演奏情報に基づいて特許文献1記載の技術により、押鍵深さを表す軌道リファランスが生成される。そして、モーション制御部120にあっては、この軌道リファランスを目標値として、鍵70の押鍵深さ、押鍵速度がサーボ制御される。ここで、押鍵深さ、押鍵速度の目標値は軌道リファランスに基づいて一意に得られるが、変位検出型キーセンサ25によって検出された押鍵深さには雑音が混入されるので、その影響を除去する必要がある。その処理の詳細を図9を参照し説明する。
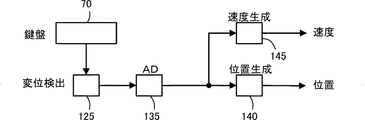
まず、RAM54に設けられた位置記憶レジスタxj(j=−3,…,3)の値が「0」に初期化される。次に、鍵盤70の押鍵深さ情報が、変位検出型キーセンサ25の機能(変位検出ユニット125)を介して検出される。そして、A/D変換ユニット135によって、変位検出型キーセンサ25のアナログ出力がデジタルデータに変換され、検出された押鍵深さが位置記憶レジスタxj(j=3)に記憶される。なお、時刻t=0においては、押鍵状態でないので、「0」の値が位置記憶レジスタxj(j=3)に記憶される。
X = (SIGMA(wXj*xj))/WX
すなわち、位置生成ユニット140によって、サンプル値xjと重み係数wXjとが積和演算され、その積和演算結果が正規化定数WX=42によって除算される。それにより、サンプル値終端(j=3)における押鍵深さの推測値Xが算出される。
V = (SIGMA(wVj*xj))/WV
すなわち、速度生成ユニット145によって、サンプル値xjと重み係数wVjとが積和演算され、その積和演算結果が規格化定数WX=28によって除算される。それにより、サンプル値終端(j=3)における押鍵速度Vの推測値が算出される。
本発明は上述した実施例に限定されるものではなく、例えば以下のように種々の変形が可能であり、全て本発明の範疇に含まれる。
(1)上記実施例においては、鍵の駆動を行ったがペダルの駆動を行ってもよい。また、管楽器等の操作子を有する楽器に応用することが可能である。
(2)上記実施例においては、自動演奏ピアノの押鍵深さを検出した信号に雑音除去方法を使用したが、産業用ロボットその他の装置に使用することが出来る。
(4)上記実施例においては、サンプル値を2次, 3次多項式で近似して算出された重み係数、正規化係数を用いたが、より高次の多項式で近似した重み係数、正規化係数を用いてもよい。
(6)また、位置の記憶はシフトレジスタに限られるものではなく、リングバッファなど適切な構成を用いればよい。なお、リングバッファを用いる場合は、内容のシフトではなく、参照アドレスを変更するだけでよい。
(7)上記実施例においては、位置記憶レジスタxj(j=−3,…,3)の値が「0」に初期化されたが、初期値は「0」でなくてもよい。例えば、そのときの系の運動状態を把握しておき、それに対応する初期値を設定してもよい。
(8)また、上記実施例においては、サンプル数nを奇数にしたが、これは偶数であってもよい。また、サンプリング間隔も等間隔でなくてもよい。これらの場合は、それぞれに適した重み付け係数、正規化係数を求めて適用するとよい。
本発明には、以下のような実施態様がある。
(1) 前記サンプル点の数は、サンプル番号j=-m からm までの(2m+1)個であり、
前記多項近似式は、前記入力された信号についての2次近似式であり、
j番目のサンプル値に対する前記重み係数は、{5j2+(2m+3)j-(m+1)(m-1) }に比例する値である
ことを特徴とする請求項1記載の雑音除去方法。
前記多項近似式は、前記入力された信号の微分についての2次近似式であり、
j番目のサンプル値に対する前記重み係数は、{30mj2+(2m+3)(2m-1)j-10m2(m+1)}に比例する値である
ことを特徴とする請求項1記載の雑音除去方法。
前記多項近似式は、前記入力された信号についての3次近似式であり、
j番目のサンプル値に対する前記重み係数は、{35j3 + 15(m+2)j2 - 5(3m2-5)j - 3(m+1)(m+2)(m-1) }に比例する値である
ことを特徴とする請求項1記載の雑音除去方法。
前記多項近似式は、前記入力された信号の微分についての3次近似式であり、
j番目のサンプル値に対する前記重み係数は、{7(3m(4m-1)+1)j3 + 18m(m+2)(m-1)j2- (3m(m(m(16m+11)-7)+5)-5)j - 6m2(m+1)(m+2)(m-1) }に比例する値である
ことを特徴とする請求項1記載の雑音除去方法。
前記多項近似式は、前記入力された信号の2階微分についての3次近似式であり、
j番目のサンプル値に対する前記重み係数は、{6(35mj3+3(m+2)(m-1)j2-7m(3m(m+1)-1)j-m(m+1)(m+2)(m-1)) }に比例する値である
ことを特徴とする請求項1記載の雑音除去方法。
Claims (4)
- 移動物体の位置または速度を推定する推定装置であって、
前記移動物体の位置を測定するセンサと、
前記センサからの情報を定期的にサンプリングするサンプリング手段と、
該サンプリング手段でサンプリングされたサンプル値を、予め定めた所定サンプル数記憶する第1の記憶手段と、
前記所定サンプル数によって決定される重み係数であって、前記位置の近似値を求める位置近似多項式における該位置の近似値と複数の前記サンプル値との自乗誤差を最小にする、前記位置近似多項式の係数に基づいて定められた重み係数を記憶する第2の記憶手段と、
該第2の記憶手段から前記重み係数を読み出す読出し手段と、
前記サンプル値と前記重み係数とを乗算し、これらの乗算結果を加算することによって前記移動物体のサンプル点終端の位置または速度を推定する演算手段と
を具備することを特徴とする推定装置。 - 駆動されることによって楽音を発生させる複数の操作子と、
前記各操作子毎に設けられ、供給された駆動信号に応じてこれら操作子を駆動する複数のアクチュエータと、
前記各操作子毎に設けられ、これら操作子の変位を測定し、該測定された変位を表す検出信号を出力する複数のセンサと、
供給された演奏情報に従って、前記各操作子の軌道リファランスを決定する軌道リファランス決定手段と、
各々の前記操作子について、複数回に渡る前記検出信号のサンプル値と該サンプル値の数によって決定される所定の重み係数との積の加算結果を計算することによって、サンプル点終端における位置または速度の推測値である終端推測値を決定する終端推測値決定手段であって、前記重み係数は、前記変位の近似値を求める変位近似多項式における該変位の近似値と複数の前記サンプル値との自乗誤差を最小にする、前記変位近似多項式の係数に基づいて定められた重み係数である、終端推測値決定手段と、
逐次計算される前記終端推測値が、前記軌道リファランスに基づく目標値に近づくように前記駆動信号を出力する駆動信号出力手段と
を具備することを特徴とする自動楽器。 - 処理装置を有し、移動物体の位置を測定するセンサからの情報に基づいて該移動物体の位置または速度を推定する推定装置に適用されるプログラムであって、
前記センサからの情報を定期的にサンプリングするサンプリング過程と、
該サンプリング過程でサンプリングされたサンプル値を、予め定めた所定サンプル数だけ第1の記憶手段に記憶する過程と、
前記所定サンプル数によって決定される重み係数であって、前記位置の近似値を求める位置近似多項式における該位置の近似値と複数の前記サンプル値との自乗誤差を最小にする、前記位置近似多項式の係数に基づいて定められた重み係数を第2の記憶手段から読み出す読出し過程と、
前記サンプル値と前記重み係数とを乗算し、これらの乗算結果を加算することによって前記移動物体のサンプル点終端の位置または速度を推定する演算過程と
を前記処理装置に実行させることを特徴とするプログラム。 - 駆動されることによって楽音を発生させる複数の操作子と、
前記各操作子毎に設けられ、供給された駆動信号に応じてこれら操作子を駆動する複数のアクチュエータと、
前記各操作子毎に設けられ、これら操作子の変位を測定し、該測定された変位を表す検出信号を出力する複数のセンサと、
処理装置と
を有する自動楽器に適用されるプログラムであって、
供給された演奏情報に従って、前記各操作子の軌道リファランスを決定する軌道リファランス決定過程と、
各々の前記操作子について、複数回に渡る前記検出信号のサンプル値と所定の重み係数との積の加算結果を計算することによって、サンプル点終端における位置または速度の推測値である終端推測値を決定する終端推測値決定過程であって、前記重み係数は、前記位置の近似値を求める位置近似多項式における該位置の近似値と複数の前記サンプル値との自乗誤差を最小にする、前記位置近似多項式の係数に基づいて定められた重み係数である、終端推測値決定過程と、
前記終端推測値と、前記軌道リファランス上の対応する目標値との差に基づいて前記駆動信号を出力する駆動信号出力過程と
を前記処理装置に実行させることを特徴とするプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003374315A JP4075771B2 (ja) | 2003-11-04 | 2003-11-04 | 推定装置、自動楽器およびプログラム |
| US10/971,283 US7390956B2 (en) | 2003-11-04 | 2004-10-21 | Automatic player musical instrument, noise suppressor incorporated therein, method used therein and computer program for the method |
| EP04025794.1A EP1530194A3 (en) | 2003-11-04 | 2004-10-29 | Automatic player musical instrument having a method and device for suppressing a noise component |
| CN2004100897704A CN1614683B (zh) | 2003-11-04 | 2004-11-04 | 自动演奏乐器、其中的噪声抑制器、方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003374315A JP4075771B2 (ja) | 2003-11-04 | 2003-11-04 | 推定装置、自動楽器およびプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005140830A JP2005140830A (ja) | 2005-06-02 |
| JP2005140830A5 JP2005140830A5 (ja) | 2006-11-02 |
| JP4075771B2 true JP4075771B2 (ja) | 2008-04-16 |
Family
ID=34431257
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003374315A Expired - Fee Related JP4075771B2 (ja) | 2003-11-04 | 2003-11-04 | 推定装置、自動楽器およびプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7390956B2 (ja) |
| EP (1) | EP1530194A3 (ja) |
| JP (1) | JP4075771B2 (ja) |
| CN (1) | CN1614683B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10167569B2 (en) | 2012-08-16 | 2019-01-01 | National University Corporation Ehime University | Hexagonal diamond bulk sintered body and its manufacturing method |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4218552B2 (ja) * | 2004-03-04 | 2009-02-04 | ヤマハ株式会社 | 鍵盤楽器 |
| EP1575026A2 (en) * | 2004-03-12 | 2005-09-14 | Yamaha Corporation | Automatic player musical instrument, for exactly controlling the keys |
| JP4193752B2 (ja) * | 2004-05-07 | 2008-12-10 | ヤマハ株式会社 | 自動演奏ピアノ |
| JP4524798B2 (ja) * | 2004-07-27 | 2010-08-18 | ヤマハ株式会社 | 鍵盤楽器のペダルのハーフポイント特定方法及び装置、並びにプログラム |
| JP2007025351A (ja) * | 2005-07-19 | 2007-02-01 | Yamaha Corp | 演奏システム |
| JP4711179B2 (ja) * | 2005-08-19 | 2011-06-29 | ヤマハ株式会社 | 電子鍵盤楽器およびプログラム |
| JP5298437B2 (ja) * | 2006-03-08 | 2013-09-25 | ヤマハ株式会社 | 鍵盤楽器 |
| JP4736883B2 (ja) * | 2006-03-22 | 2011-07-27 | ヤマハ株式会社 | 自動演奏装置 |
| JP5023709B2 (ja) * | 2006-04-03 | 2012-09-12 | 株式会社デンソー | 通信システム及び通信装置 |
| JP5056197B2 (ja) * | 2007-06-22 | 2012-10-24 | ヤマハ株式会社 | 演奏支援装置及び演奏装置 |
| US7825312B2 (en) * | 2008-02-27 | 2010-11-02 | Steinway Musical Instruments, Inc. | Pianos playable in acoustic and silent modes |
| JP5560777B2 (ja) * | 2009-03-13 | 2014-07-30 | ヤマハ株式会社 | 鍵盤楽器 |
| US8541673B2 (en) | 2009-04-24 | 2013-09-24 | Steinway Musical Instruments, Inc. | Hammer stoppers for pianos having acoustic and silent modes |
| US8148620B2 (en) * | 2009-04-24 | 2012-04-03 | Steinway Musical Instruments, Inc. | Hammer stoppers and use thereof in pianos playable in acoustic and silent modes |
| JP6402502B2 (ja) * | 2014-06-20 | 2018-10-10 | ヤマハ株式会社 | 演奏情報出力制御装置、鍵盤楽器及び制御方法 |
| WO2018132965A1 (en) * | 2017-01-18 | 2018-07-26 | Sunland Information Technology Co., Ltd. | An automatic playing system |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5254804A (en) * | 1989-03-31 | 1993-10-19 | Yamaha Corporation | Electronic piano system accompanied with automatic performance function |
| US5652399A (en) * | 1993-12-17 | 1997-07-29 | Yamaha Corporation | Automatic player piano and estimator for acceleration of depressed key incorporated in the automatic player piano |
| JP3596015B2 (ja) | 1993-12-17 | 2004-12-02 | ヤマハ株式会社 | 自動ピアノ |
| JP3620063B2 (ja) * | 1994-03-25 | 2005-02-16 | ヤマハ株式会社 | 自動ピアノおよび演奏データ加工装置 |
| JP3588872B2 (ja) * | 1995-09-19 | 2004-11-17 | ヤマハ株式会社 | 自動ピアノ |
| JP3807030B2 (ja) * | 1997-01-14 | 2006-08-09 | ヤマハ株式会社 | 鍵盤楽器、電子楽器および方法ならびに記録媒体 |
| JP3890649B2 (ja) * | 1997-02-21 | 2007-03-07 | ヤマハ株式会社 | 自動ピアノの演奏データ変換装置 |
| CN1218294C (zh) * | 2001-09-18 | 2005-09-07 | 武汉科恒工控工程有限责任公司 | 自动钢琴演奏系统 |
-
2003
- 2003-11-04 JP JP2003374315A patent/JP4075771B2/ja not_active Expired - Fee Related
-
2004
- 2004-10-21 US US10/971,283 patent/US7390956B2/en active Active
- 2004-10-29 EP EP04025794.1A patent/EP1530194A3/en not_active Withdrawn
- 2004-11-04 CN CN2004100897704A patent/CN1614683B/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10167569B2 (en) | 2012-08-16 | 2019-01-01 | National University Corporation Ehime University | Hexagonal diamond bulk sintered body and its manufacturing method |
Also Published As
| Publication number | Publication date |
|---|---|
| US7390956B2 (en) | 2008-06-24 |
| CN1614683A (zh) | 2005-05-11 |
| EP1530194A3 (en) | 2016-12-14 |
| US20050092160A1 (en) | 2005-05-05 |
| CN1614683B (zh) | 2010-06-16 |
| JP2005140830A (ja) | 2005-06-02 |
| EP1530194A2 (en) | 2005-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4075771B2 (ja) | 推定装置、自動楽器およびプログラム | |
| JP6015192B2 (ja) | 疲労試験機 | |
| JP4193752B2 (ja) | 自動演奏ピアノ | |
| JP4636364B2 (ja) | 演奏操作子の駆動方法、演奏操作子の駆動装置、プログラムおよび自動演奏ピアノ | |
| JP4639795B2 (ja) | 楽器の演奏駆動装置、鍵盤楽器の演奏駆動システム及び鍵盤楽器。 | |
| JP2014021233A (ja) | 鍵盤楽器 | |
| JP4375200B2 (ja) | 力覚制御用基礎情報出力装置 | |
| JP4479554B2 (ja) | 鍵盤楽器 | |
| JP2006235216A (ja) | 楽器演奏の再生駆動装置、鍵盤楽器及び自動演奏ピアノ | |
| JP4483636B2 (ja) | 鍵盤楽器 | |
| JP2011081380A (ja) | テルミン演奏ロボット | |
| Fujisaki et al. | In-tool motion sensing for evaluation of violin performance | |
| JP4222210B2 (ja) | 演奏システム | |
| JP2006084686A (ja) | 物理量検出装置、物理量検出方法、物理量検出プログラム及び鍵盤楽器 | |
| JP4134952B2 (ja) | 自動演奏ピアノ | |
| JP2692356B2 (ja) | 電子楽器 | |
| JP4296664B2 (ja) | ソレノイド駆動制御装置及びソレノイド駆動制御方法 | |
| JP4345690B2 (ja) | 鍵盤楽器及び操作子反力適正化システム | |
| JP6736930B2 (ja) | 電子楽器および音信号生成方法 | |
| JP3495595B2 (ja) | 振動台制御装置 | |
| JP2004294769A (ja) | 演奏操作子駆動装置 | |
| JP3055788B2 (ja) | 振動特性解析方法及び装置 | |
| JP5298437B2 (ja) | 鍵盤楽器 | |
| JP4232663B2 (ja) | 自動演奏楽器の演奏操作子の駆動装置及びその駆動方法 | |
| JP3873823B2 (ja) | 再生性能評価装置、楽器及び鍵盤楽器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060623 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060915 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070424 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070904 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071030 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080108 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080121 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4075771 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110208 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120208 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130208 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140208 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |