JP4028618B2 - 車両の速度を制御するための方法及び装置 - Google Patents
車両の速度を制御するための方法及び装置 Download PDFInfo
- Publication number
- JP4028618B2 JP4028618B2 JP18255797A JP18255797A JP4028618B2 JP 4028618 B2 JP4028618 B2 JP 4028618B2 JP 18255797 A JP18255797 A JP 18255797A JP 18255797 A JP18255797 A JP 18255797A JP 4028618 B2 JP4028618 B2 JP 4028618B2
- Authority
- JP
- Japan
- Prior art keywords
- speed
- vehicle
- standard
- driver
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0008—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including means for detecting potential obstacles in vehicle path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/02—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism
- B60K31/04—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means
- B60K31/042—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means where at least one electrical quantity is set by the vehicle operator
- B60K31/045—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means where at least one electrical quantity is set by the vehicle operator in a memory, e.g. a capacitor
- B60K31/047—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including electrically actuated servomechanism and means for comparing one electrical quantity, e.g. voltage, pulse, waveform, flux, or the like, with another quantity of a like kind, which comparison means is involved in the development of an electrical signal which is fed into the controlling means where at least one electrical quantity is set by the vehicle operator in a memory, e.g. a capacitor the memory being digital
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
【発明の属する技術分野】
この発明は車両の速度を制御するための方法及び装置に関係している。
【0002】
【従来の技術】
車両の速度を制御するための方法及び装置は多様な変化における技術水準によって知られている。例えば、刊行物SAE紙96 10 10号「適応巡行制御、システム状況及び開発傾向、1996」(SAE Paper No.96 10 10“Adaptive Cruise Control,SystemAspects and Development Trends,1996”)は前方走行中の車両に対する車間(離隔)距離を考慮しての速度制御を記述している。その場合、運転者は走行速度制御において通常の機能、設定、再開、加速などを備えた操作レバーによって標準速度を設定するが、これは、前方車両が存在しない場合に伝統的な走行速度制御器と同等に調整され、そして標準速度と走行速度の差から理論的な加速度aFGRが計算される。レーダシステムが先行する車両を認識すれば、この車両に対する車間距離及び相対速度が検出される。制御課題はこの場合、相対速度を零に調整し且つその際同時に速度依存性の標準車間距離を守ることにある。標準車間距離(時間間隔)を決定するためのパラメータは運転者によって調整可能である。この追従制御器は上述の大きさから標準加速度aFolgeを決定するが、この加速度は加速度aFGRによって制限されて、追従制御においても所与の標準速度が越えられ得ないようになっている。離隔制御器及び車両速度制御器は動作状態に応じて車両の加速度又は減速度を設定するが、これは車両の機関及び/又はブレーキへの影響によって調整される。
【0003】
ドイツ公報DE−AI第43 38 399号には車両速度制御器が記述されており、これは標準(目標)速度と実際速度との差に基づいて標準加速度を設定するが、この加速度は機関の制御及び/又は車両の車輪ブレーキの動作によって調整される。
【0004】
ドイツ公報DE−OS第28 42 023号によって、車両速度を機関出力への影響だけにより調整する車両速度制御器が知られている。これにおいては動的動作状態において、加速、減速、再開の際に、時間的に変化する標準速度が準備されていて、この速度は所与の加速度又は減速度を有する車両を所望の又は記憶された設定値へ導く。
【0005】
これらすべての速度制御においては、速度制御器が時々スイッチを切られて、車両が先行する制御動作において記憶された速度に対応するものよりも本質的に高い速度で移動するという動作状態が出現し得る。この動作状態は、例えば、運転者が加速のために加速ペダルを操作して車両の速度を、記憶された標準速度を越えて相当に高めるときに出現する。このような動作状況においては運転者による走行速度制御器の再開キーの操作の際に快適性を喪失する事態になることがあるが、これは走行速度制御器が車両を、記憶された現在の速度に比べて低い速度の達成のために強く減速するからである。
【0006】
【発明が解決しようとする課題】
それゆえにそのような動作状況における走行快適性を改善するための手段を示すことがこの発明の課題である。
【0007】
【課題を解決するための手段】
走行速度制御の再開の際に車両の意図されない減速を阻止することによって走行快適性が改善される。
【0008】
このため、車両速度が運転者により設定された標準速度及び実際速度に応じて制御される車両の速度を制御するための方法および装置において、運転者による制御の切離し後に制御が最初に記憶された標準速度で再開され得るようになっており、少なくとも一つの運転状況においては最初の標準速度の再開が遅延させられる。
【0009】
【発明の実施の形態】
この発明は次に図面に示された実施形態に基づいて詳細に説明される。この発明による解決策は以下において適応車両速度制御器の好適な応用事例に基づいて示される。しかしながら、この解決策は又車輌の走行速度制御の最初に言及したそれ以外の実施形態において有利な方法で行われる。
【0010】
図1は適応走行速度制御器のための制御ユニット10の概略的接続図を示している。制御ユニット10は、入力回路12、少なくとも一つのマイクロコンピュータ14、及び出力回路16を含んでいる。これらの素子は通信系統18によりデータ交換及び情報交換のために相互に接続されている。入力回路12には、走行速度の検出のための測定装置22から入力導線20が、走行速度制御器の動作状態及び標準離隔(車間)距離を設定するための運転者により操作可能な操作素子26から入力導線24が、並びに離隔(車間)距離測定装置30、好ましくはレーダ装置からの出力導線28が供給されている。更に、入力回路12には、適応走行速度制御の際に使用される、車両の更なる動作量を検出するための測定装置36ないし38から更なる入力導線32ないし34が供給される。そのような動作量は例えば操縦角度、横断加速度などである。制御ユニット10では、少なくとも一つのマイクロコンピュータ14が適応走行速度制御の範囲内で少なくとも一つの出力導線40及び対応する調整装置42(例えば電子式機関制御装置)を介して車両の駆動装置の出力に影響を及ぼす。更に、制御ユニット10は、好適な実施例においては、出力導線44及び対応する調整素子46(例えばABS/ASR素子を備えたブレーキ装置)を介して車両の車輪ブレーキにおける制御力に影響を及ぼす。
【0011】
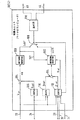
最初に言及した技術水準によって既知の、適応走行速度制御の基本原理は図2にブロック接続図に基づいて示されており、これは適応走行速度制御における基本的関係を示している。走行速度制御の実現は好適な実施例においてはマイクロコンピュータ14のプログラムとして行われ、これによって図2に示された機能が実現される。図示された適応走行速度制御器は二つの基本的機能、走行速度制御手段100及び離隔距離制御手段102を持っている。従来どおりの方法で実現された走行速度制御手段100には比較段104から標準(目標)速度Vsollと実際速度Vistとの差ΔVが供給される。標準速度Vsollは、この場合、選択段106における操作素子26の操作状態に依存して決定される。それで例えば動作状態、設定において現在の実際速度Vistの値が標準速度Vsollとして引き継がれるならば、動作状態、加速においては標準速度の時間的に変化する傾斜が設定される。走行速度制御手段100により速度差ΔVに依存して所与の制御戦略に従って形成された出力信号SollFは、回路素子108に与えられ、且つ導線107を通して離隔距離制御手段102に引き渡される。この回路素子108は接続位置に応じて走行速度制御手段100の出力信号SollF又は離隔距離制御手段102の出力信号SollDを選択段110に導く。この選択段110は、供給された出力信号に依存して、機関出力(出力導線40)又は制動力(出力導線44)に影響を及ぼす制御信号を形成する。離隔距離制御手段102は選択段112を含んでおり、これは、入力導線28を通して供給されたレーダ信号、入力導線20からの実際速度Vist、及び更に入力導線32ないし34を通して供給された量、例えば車両の操縦角度、偏揺れ率、加速度に依存して、離隔距離制御のための前方車両として使用され得る関連の車両を決定する。その場合その車両の予想されるべき進路は速度及び場合によっては操縦角度に基づいて決定される。レーダセンサは、検出された物体に対する離隔距離、これの相対的速度、及び種々の物体に対する角度を供給し、従って供給されたデータと車両の予想されるべき今後の進路に対するデータとの比較から関連の車両が選び出される。次いで、レーダセンサにより決定された関連の車両に対する離隔距離についての値Dist及びこの車両の相対速度Vrelが出力される。実際の離隔距離Distがその際比較段114に供給され、この段においては運転者により設定された標準(目標)離隔距離Dsollと検出された実際の離隔距離Distとの差が形成されて離隔距離制御手段102に供給される。関連の先行する車両に対する離隔距離は選択段116において、先行する車両に対する標準時間間隔を秒単位で固定する運転者の操作信号に及び実際速度に依存して決定される。離隔距離制御手段102は、出力信号SollDを形成するが、この信号と共に離隔距離差も先行車両の相対速度も0の方へ導かれる。それに関連して離隔距離制御手段102は所与の標準速度Vsollを超えることができず、この制御手段102には走行速度制御手段100の標準量SollFが供給される。出力信号SollDは回路素子108に供給される。これは、それに対する離隔距離が調整されるべきである先行する車両が認識されたときには、破線で示された位置に切り換えられる。これは、離隔距離測定のための車両が検出されなかったときには走行速度制御手段100がその入力量に従って機関出力及び制動出力を決定し、これに対して既知の先行車両がある場合には離隔距離制御手段102が機関出力及び制動出力を制御することを意味する。選択段110は、本質的に標準加速度又は減速度に対応している、供給された設定値に依存して、機関制御又はブレーキ制御が活動化されるかどうかを決定する。機関出力の減小が標準減速度を守るのに十分でなければ、ブレーキが活動化され、そうでない場合には機関出力の制御による減速制御が実施される。
【0012】
上に記述された適応走行速度制御の原理的機能方法は最初に言及した技術の水準によって既知である。車両が例えば走行速度制御手段の記憶された標準速度より速い速度で走行し且つ適応走行速度制御手段がそのような運転状況において再開キーの操作により最後に設定された標準速度で新たに活動化されるならば、走行速度制御手段が記憶された標準速度の調整のために必要な走行減速度を大きいトルク減小及び/又は活動的なブレーキ介入により実現すると、望ましくない反応を生じることがある。これを防止するために、走行速度制御手段の再開キーの操作の際に、記憶された標準速度Vsollが車両の現在の実際速度Vistより明らかに小さいかどうかが検査されることが標準されている。これが事実ならば、古い設定速度の遅延した再開が行われる。
【0013】
好適な実施例においては、その場合適用可能な期間の間現在の走行速度が設定速度として使用される。同時に、運転者には適当な表示概念(例えば、古い記憶された標準速度における点滅するパイロットランプ)によってこの特別の過渡的状態が明らかにされる。これによって運転者には操作素子における介入により記憶された標準速度を適合させる、すなわち、より大きい値に設定する可能性が与えられる。これにより運転者は望まれない走行減速を回避することができる。対応する運転者介入が行われなければ、所与の期間の経過後に古い記憶された標準速度が引き継がれて車両の減速が開始される。
【0014】
減速期間中に現在の実際速度Vistを標準速度Vsollとして引き継ぐことのほかに、選択的にこれに加えて、この期間中の標準速度が現在の速度から始まって記憶された標準速度の方へ減小し、従って走行速度制御手段が減速期間中に既に車両の小さい減速度を生じさせることが準備されてもよい。
【0015】
この発明による解決策の実現は好適な実施例において図3による流れ図に示されている。
【0016】
図3に示されたプログラムは、例えば運転者による再開キーの操作による走行速度制御手段の活動化で開始される。プログラムの最初のステップ200において、記憶される標準速度Vsoll及び実際速度Vistが読み込まれる。その次の照合ステップ202において、実際速度Vistと標準速度Vsollとの差がしきい値Δと比較される。この差が、一定であるか又は現在の機関出力、現在の走行速度などに依存し得るこのしきい値Δにより小さければ、ステップ203に従って、計数器Zが零にセットされ(Z=O)、そしてステップ204に従って走行速度制御が記憶された標準速度を考慮に入れて実施され、一方、記憶された標準速度Vsoll及び現在の実際速度Vistに依存して標準加速度Vsollが形成される(Asoll=f(Vsoll、Vist))が、これは機関出力の増大又は減小によって及び場合によってはブレーキ介入によって実現される。その後でプログラムは終了され、そして所与の時点で繰り返される。
【0017】
ステップ202において、実際速度Vistと標準速度Vsollとの差がしきい値Δより大きいことが確定されたならば、その次のステップ210において、制御手段の活動化の際零にセットされる計数器Zがその最大値に達したか又はこれを超えたかどうかが検査される。計数器がその最大値に達したか又はこれを超えたならば、ステップ204に従って制御が実施される。計数器状態が最大値より下にあるならば、その次のステップ212において計数器は増分され(Z=Z+1)、そしてオプションのステップ214において運転者にこの特別の過渡的状態が明らかにされる。これは例えば、速度の表示装置における発光ダイオード(LED)が記憶された低い設定速度において、場合によっては音響式警報のような更なる手段により支援されて、点滅することによって達成される。その次のステップ216において標準速度Vsollが現在の実際速度Vistの値又はこれから導出された値に設定され(Vsoll=Vist)、そしてその次のステップ204においてこの設定値に基づいて制御が実施される。ステップ216による標準速度の適合は単にプログラム過程のために行われる。ステップ200において読み込まれた標準速度Vsollというのは、運転者により設定された、場合によっては運転者によりその間に変更された、記憶された標準速度のことである。
【0018】
この発明による解決策の動作方法が図4において時間図に基づいて明らかにされている。この場合、図4aは標準速度Vsollの時間的経過を、図4bは実際速度Vistのそれを、又図4cは再開信号WAのそれを示している。まず最初に、車両は走行速度制御の作用の下で事前決定の設定値に調整される。時点T0において走行速度制御は放棄され、そして車両の速度はアクセル操作によって高められる。次に制御手段は切り離され、そして時点T1において再開キーの操作によって新たに活動化される。これはこの発明に従って遅延した再開を生じることになるが、その際時点T2までは運転者に不変の速度の場合に、標準速度を快適性改善のために適合させる可能性が提供される。これは時点T2までは行われず、従ってT1とT2との間の期間(t−Z)に実際速度に設定された標準速度は徐々に又は急激に最初に記憶された値に戻される。時点T2からはそれゆえ減速度が導入され、従って運転者が標準速度への適合を行わなかった場合には車両は最初に設定された標準速度へ減速される。
【0019】
この発明による解決策は適応走行速度制御との関連においても又ブレーキ介入を伴う及び伴なわない走行速度制御の場合にも利用される。再開の遅延はその場合遅延時間中不変の標準速度によって又は時間的に再開速度の方へ減小する標準速度によって行われる。
【0020】
【発明の効果】
この発明によれば走行速度制御の再開の際に車両の意図されない減速が阻止され、それによって有利な方法で走行快適性が改善される。更に、運転者及び後続の交通は理由のない減速過程によっていらいらさせられないが、特に適応走行速度制御器(離隔距離制御と関連した走行速度制御器)においてしばしば実現されるような、ブレーキ介入を伴った速度制御の場合には快適性が相当改善される。
【0021】
特に有利なのは、適応走行速度制御器の好適な実施例において、遅い先行車両における不利な影響が示されないことであるが、これはこの場合には離隔距離制御が依然として完全に有効であるからである。
【図面の簡単な説明】
【図1】車両の速度を制御するための制御ユニットの概略的接続図。
【図2】図1の制御ユニットの適応車両速度制御器における実施例の更に詳細な接続図。
【図3】制御ユニットのマイクロコンピュータにおいて進行するプログラムを示しているこの発明による解決策の流れ図。
【図4】この発明による解決策の好適な実施が示されている時間図。
【符号の説明】
10 制御ユニット
12 入力回路
14 マイクロコンピュータ
16 出力回路
22 走行速度測定装置
30 離隔(車間)距離測定装置
42 調整装置
46 調整素子
100 走行速度制御手段
102 離隔距離制御手段
Claims (7)
- 車両速度が運転者により設定された標準速度及び実際速度に応じて制御され、運転者による制御の切離し後に制御が最初に記憶された標準速度で再開され得るようになっている、走行速度制御手段を備える車両の速度を制御するための方法であって、
車両の実際速度を検出するステップと、
車両の実際速度が、記憶された標準速度より大きいか否かを判定するステップと、
運転者によって再開が操作され、且つ実際速度が記憶された標準速度よりも大きい場合、事前設定の期間、走行速度制御手段による制御の再開を遅延させるステップと、
事前設定の期間の経過後、実際速度が記憶された標準速度に近づくように車両を減速するステップと、
を含む方法。 - 走行速度制御手段が離隔距離制御手段と組み合わされていることによって特徴づけられている、請求項1に記載の方法。
- 再開の遅延が実際速度から導出された標準速度の設定により実施されることによって特徴づけられている、請求項1に記載の方法。
- 再開の遅延が現在の実際速度を標準速度として設定することにより実施されることによって特徴づけられている、請求項3に記載の方法。
- 車両が速度表示装置を備え、実際速度が記憶された標準速度よりも大きいという運転状態が運転者に、記憶された標準速度において速度表示装置の点滅する発光ダイオードにより、示されることによって特徴づけられている、請求項4に記載の方法。
- 走行速度制御手段が標準速度及び実際速度に応じて標準減速度を決定し、この減速度が機関出力の減小により及び車両のブレーキ装置の活動化により、またはそのいずれかにより、実現されることによって特徴づけられている、請求項5に記載の方法。
- 運転者によって操作される車両速度を制御するための装置であって、
車両の実際速度を検出する手段と、
運転者により設定された標準速度及び実際速度に応じて、車両の速度を制御する走行速度制御手段と、
運転者が走行速度制御手段の切離し後に、記憶された標準速度で制御を再開することを可能とする手段と、
車両の実際速度が、記憶された標準速度より大きいか否かを判定する手段と、
運転者によって再開が操作され、且つ実際速度が記憶された標準速度よりも大きい場合、事前設定の期間、走行速度制御手段による制御の再開を遅延させる手段と、
事前設定の期間の経過後、実際速度が記憶された標準速度に近づくように車両を減速する手段と、
を備える装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19627727A DE19627727B4 (de) | 1996-07-10 | 1996-07-10 | Verfahren und Vorrichtung zur Steuerung der Geschwindigkeit eines Fahrzeugs |
| DE19627727.2 | 1996-07-10 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPH1067256A JPH1067256A (ja) | 1998-03-10 |
| JPH1067256A5 JPH1067256A5 (ja) | 2006-12-14 |
| JP4028618B2 true JP4028618B2 (ja) | 2007-12-26 |
Family
ID=7799398
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP18255797A Expired - Fee Related JP4028618B2 (ja) | 1996-07-10 | 1997-07-08 | 車両の速度を制御するための方法及び装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6311117B1 (ja) |
| JP (1) | JP4028618B2 (ja) |
| DE (1) | DE19627727B4 (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19901527C1 (de) | 1999-01-16 | 2000-07-06 | Porsche Ag | Verfahren zum Regeln der Fahrgeschwindigkeit eines Kraftfahrzeuges |
| JP3627582B2 (ja) * | 1999-07-30 | 2005-03-09 | 日産自動車株式会社 | 車両用追従制御装置 |
| DE10015300B4 (de) | 2000-03-28 | 2018-04-05 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Steuerung der Fahrgeschwindigkeit eines Fahrzeugs |
| DE10015303B4 (de) * | 2000-03-28 | 2016-11-03 | Robert Bosch Gmbh | Verfahren zum Abbrechen eines Bremseingriffs eines Abstandsregelsystems eines Kraftfahrzeugs |
| DE10017662A1 (de) | 2000-04-08 | 2001-10-11 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Steuerung des Abstands eines Fahrzeugs zu einem vorausfahrenden Fahrzeug |
| DE10018557A1 (de) * | 2000-04-14 | 2001-10-18 | Bosch Gmbh Robert | Verfahren zur Regelung der Geschwindigkeit eines Fahrzeugs |
| DE10019181A1 (de) | 2000-04-17 | 2001-10-25 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Einstellung der Fahrzeuglängsgeschwindigkeit auf eine Sollgeschwindigkeit |
| JP3838048B2 (ja) * | 2001-04-16 | 2006-10-25 | 日産自動車株式会社 | 車両用走行制御装置 |
| DE10231360A1 (de) | 2002-07-11 | 2004-01-22 | Robert Bosch Gmbh | Verfahren zur Regelung der Geschwindigkeit eines Fahrzeugs |
| JP3918686B2 (ja) * | 2002-08-30 | 2007-05-23 | 株式会社日立製作所 | 自動車の走行制御装置及び制御方法 |
| US7416265B2 (en) | 2002-11-26 | 2008-08-26 | Caterpillar Inc. | Apparatus and method for varying brake response of a vehicle |
| JP3974516B2 (ja) * | 2002-12-27 | 2007-09-12 | 株式会社日立製作所 | 車両用定速走行装置 |
| DE10311191B4 (de) * | 2003-03-12 | 2014-10-16 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Geschwindigkeitsregelung eines Kraftfahrzeugs |
| DE10313816A1 (de) * | 2003-03-24 | 2004-10-07 | Valeo Schalter Und Sensoren Gmbh | Lenksäulenmodul |
| GB0310343D0 (en) * | 2003-05-06 | 2003-06-11 | Switched Reluctance Drives Ltd | A controller for a power train |
| DE10336331A1 (de) * | 2003-08-07 | 2005-03-03 | Robert Bosch Gmbh | Vorrichtung zur adaptiven Geschwindigkeitsregelung für Kraftfahrzeuge |
| DE10358968B4 (de) * | 2003-12-16 | 2012-04-26 | Bayerische Motoren Werke Aktiengesellschaft | Fahrgeschwindigkeitsregelvorrichtung für ein Kraftfahrzeug, die mit einem Navigationssystem verbunden ist |
| JP4997031B2 (ja) * | 2007-09-06 | 2012-08-08 | トヨタ自動車株式会社 | 車両走行制御装置 |
| US8738248B2 (en) * | 2008-10-21 | 2014-05-27 | Allison Transmission, Inc. | System for controlling vehicle overspeeding via control of one or more exhaust brake devices |
| US8311720B2 (en) * | 2009-01-09 | 2012-11-13 | Robert Bosch Gmbh | Lost target function for adaptive cruise control |
| DE102010019500A1 (de) * | 2010-05-06 | 2011-11-10 | Gm Global Technology Operations Llc (N.D.Ges.D. Staates Delaware) | Geschwindigkeitsregelung eines Kraftfahrzeugs |
| DE102013200391B4 (de) * | 2013-01-14 | 2022-02-17 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur adaptiven Geschwindigkeitsregelung eines Kraftfahrzeugs mit manuellem Schaltgetriebe |
| CN109131327B (zh) * | 2018-08-29 | 2020-06-09 | 国机智骏科技有限公司 | 电动汽车定速巡航速度调节方法、装置及电动汽车 |
| CN112693463A (zh) * | 2020-12-31 | 2021-04-23 | 浙江合众新能源汽车有限公司 | 一种基于超越模式的车辆超越控制方法及系统 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS641803B2 (ja) | 1978-07-15 | 1989-01-12 | Bosch Gmbh Robert | |
| DE2842023A1 (de) * | 1978-09-27 | 1980-04-10 | Bosch Gmbh Robert | Digitale regeleinrichtung fuer die fahrgeschwindigkeit eines kraftfahrzeugs |
| JPS5699518A (en) * | 1980-01-14 | 1981-08-10 | Nissan Motor Co Ltd | Automatic constant-speed running device for car |
| JPS56101039A (en) * | 1980-01-18 | 1981-08-13 | Nissan Motor Co Ltd | Automatic system for operating vehicle at constant speed |
| JPS6053185B2 (ja) * | 1980-02-15 | 1985-11-25 | 日産自動車株式会社 | 点火時期制御方法 |
| US4463822A (en) * | 1981-05-27 | 1984-08-07 | Fujitsu Ten Limited | Cruise control system for automotive vehicle |
| CA1199391A (en) * | 1981-12-21 | 1986-01-14 | Kou Tanigawa | Apparatus for controlling the speed of an automobile |
| US4736813A (en) * | 1985-04-16 | 1988-04-12 | Mazda Motor Corporation | Cruise control system for vehicle |
| JPH07108622B2 (ja) * | 1986-08-28 | 1995-11-22 | 日産自動車株式会社 | 車両用定速走行装置 |
| DE3743471A1 (de) * | 1987-12-22 | 1989-07-13 | Bosch Gmbh Robert | Antriebsschlupfregelsystem |
| US5333109A (en) * | 1991-08-09 | 1994-07-26 | Ford Motor Company | Vehicle speed control system with adaptive learning |
| US5216609A (en) * | 1991-08-09 | 1993-06-01 | Ford Motor Company | Vehicle speed control system with multiplex switch decoding |
| DE4200694B4 (de) * | 1992-01-14 | 2004-04-29 | Robert Bosch Gmbh | Verfahren zur Geschwindigkeits- und Abstandsregelung eines Fahrzeugs |
| US5238080A (en) * | 1992-03-12 | 1993-08-24 | Fastie William G | Brake pedal operated mechanism for automatically controlling speed of a vehicle |
| JP2946962B2 (ja) * | 1992-10-01 | 1999-09-13 | トヨタ自動車株式会社 | 車載用内燃機関の回転数制御装置 |
| JP3569926B2 (ja) * | 1993-03-03 | 2004-09-29 | 株式会社デンソー | 車両走行制御装置 |
| DE4338399B4 (de) * | 1993-11-10 | 2013-02-21 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Steuerung eines Fahrzeugs |
-
1996
- 1996-07-10 DE DE19627727A patent/DE19627727B4/de not_active Expired - Lifetime
-
1997
- 1997-07-08 JP JP18255797A patent/JP4028618B2/ja not_active Expired - Fee Related
- 1997-07-10 US US08/890,933 patent/US6311117B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JPH1067256A (ja) | 1998-03-10 |
| DE19627727B4 (de) | 2012-05-31 |
| DE19627727A1 (de) | 1998-01-15 |
| US6311117B1 (en) | 2001-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4028618B2 (ja) | 車両の速度を制御するための方法及び装置 | |
| US5713428A (en) | Apparatus for regulating the speed of a motor vehicle | |
| EP0720928B1 (en) | Cruise control system | |
| US6273204B1 (en) | Method and arrangement for controlling the speed of a vehicle | |
| US6618000B2 (en) | Method and device for controlling the distance from a vehicle to a preceding vehicle | |
| US6878096B1 (en) | Method and device for securing the standstill of a vehicle, notably in conjunction with a vehicle speed control | |
| JP3748885B2 (ja) | 車両の制御方法および装置 | |
| US6591181B2 (en) | Method and device for setting the vehicle longitudinal velocity to a deired speed | |
| US6374174B2 (en) | Method for terminating a braking intervention of an adaptive cruise control system of a motor vehicle | |
| US6161074A (en) | Method and system for continued vehicle control in an adaptive speed control system at vehicle speeds below a minimum operating speed when a sensed target disappears | |
| US9114809B2 (en) | Cruise controller for motor vehicles and method of operating same | |
| JP3675240B2 (ja) | 車両用追従制御装置 | |
| GB2295695A (en) | Apparatus and method for cruise control | |
| JP4295850B2 (ja) | 車間距離に基づく車速制御方法 | |
| JP4885368B2 (ja) | 車両の適応的な距離制御及び/又は走行速度制御方法及びその装置 | |
| JPH08238954A (ja) | クルーズコントロールのための装置および方法 | |
| GB2312481A (en) | Controlling the brake system of a vehicle | |
| CN108778883A (zh) | 机动车中的驾驶员辅助系统 | |
| CN112292299A (zh) | 用于运行车辆的方法和控制器 | |
| US7228220B2 (en) | Device for adaptive distance and speed control with having torque dampening | |
| JP2000194998A (ja) | 車両走行制御方法及びその装置 | |
| KR100579013B1 (ko) | 차량 속도 제어 방법 및 장치 | |
| US20070282514A1 (en) | Method And System For Remotely Controlling Speed Limitation For A Motor Vehicle | |
| JP2002127782A (ja) | 車両用追従走行制御装置 | |
| JP3233122B2 (ja) | 車間距離調整機能を備えた定速走行制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040707 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070105 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20070109 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20070112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070913 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071012 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101019 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111019 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121019 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121019 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131019 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |