JP3919003B2 - Dcブラシレスモータのロータ角度検出装置 - Google Patents
Dcブラシレスモータのロータ角度検出装置 Download PDFInfo
- Publication number
- JP3919003B2 JP3919003B2 JP2002280408A JP2002280408A JP3919003B2 JP 3919003 B2 JP3919003 B2 JP 3919003B2 JP 2002280408 A JP2002280408 A JP 2002280408A JP 2002280408 A JP2002280408 A JP 2002280408A JP 3919003 B2 JP3919003 B2 JP 3919003B2
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- axis
- motor
- rotor angle
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000007689 inspection Methods 0.000 claims abstract description 82
- 238000001514 detection method Methods 0.000 claims description 68
- 230000008859 change Effects 0.000 claims description 21
- 238000006243 chemical reaction Methods 0.000 claims description 12
- 230000004907 flux Effects 0.000 claims description 3
- 230000014509 gene expression Effects 0.000 description 43
- 239000011159 matrix material Substances 0.000 description 39
- 238000000034 method Methods 0.000 description 13
- 238000010586 diagram Methods 0.000 description 10
- 230000006870 function Effects 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 230000007704 transition Effects 0.000 description 3
- NAWXUBYGYWOOIX-SFHVURJKSA-N (2s)-2-[[4-[2-(2,4-diaminoquinazolin-6-yl)ethyl]benzoyl]amino]-4-methylidenepentanedioic acid Chemical compound C1=CC2=NC(N)=NC(N)=C2C=C1CCC1=CC=C(C(=O)N[C@@H](CC(=C)C(O)=O)C(O)=O)C=C1 NAWXUBYGYWOOIX-SFHVURJKSA-N 0.000 description 2
- OVSKIKFHRZPJSS-UHFFFAOYSA-N 2,4-D Chemical compound OC(=O)COC1=CC=C(Cl)C=C1Cl OVSKIKFHRZPJSS-UHFFFAOYSA-N 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000016507 interphase Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/34—Testing dynamo-electric machines
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/2006—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the self-induction of one or more coils
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Ac Motors In General (AREA)
Description
【発明の属する技術分野】
本発明は、DCブラシレスモータのロータ角度をロータの位置検出センサを用いることなく検出するDCブラシレスモータのロータ角度検出装置に関する。
【0002】
【従来の技術】
DCブラシレスモータを駆動して所望のトルクを得るためには、磁極を有するロータの電気角(以下、ロータ角度という)に対応した適切な位相で電機子に電圧を印加する必要がある。そして、ロータ角度を検出する位置検出センサを省いてDCブラシレスモータと駆動装置のコストダウンを図るべく、位置検出センサを用いずにロータ角度を検出する種々の方法が提案されている。
【0003】
例えば、特許文献1及び特許文献2には、いわゆるdq座標系によりDCブラシレスモータの制御を行うモータ制御装置において、一方の軸方向に推定用交流信号電圧を印加したときに、他方の軸側に生じる電流によりロータ角度を検知する方法が記載されている。
【0004】
また、本願発明者らも、先の出願(特願2001−288303)において、位置検出センサを用いずにロータ角度を検出するロータ角度検出装置を提案している。かかるロータ角度検出装置においては、突極型のDCブラシレスモータの3相の電機子に印加する駆動電圧に高周波の検査用電圧を重畳したときに、該3相の電子機のうちの第1相に流れる電流の検出値及び第2相に流れる電流の検出値と、該検査用電圧に応じた高周波成分とを用いて、該モータのロータ角度の2倍角の正弦値に応じた正弦参照値と該2倍角の余弦値に応じた余弦参照値とを算出する。
【0005】
そして、該正弦参照値と余弦参照値に基づいて、ロータ角度を初期追従性良くモータパラメータの影響をほとんど受けることなくロータ角度を検出することができる。
【0006】
しかし、このように、ロータ角度を検知するために駆動電圧に検査用電圧を重畳したときに、モータから耳障りなノイズが発生する場合がある。
【0007】
【特許文献1】
特開平10−323099号公報
【特許文献2】
特開平11−332279号公報
【0008】
【発明が解決しようとする課題】
本発明は、上記背景を鑑みてなされたものであり、駆動電圧に検査用電圧を重畳してロータ角度を検出する際に、耳障りなノイズが発生することを抑制したDCブラシレスモータのロータ角度検出装置を提供することを目的とする。
【0009】
【課題を解決するための手段】
先ず、本発明について説明する前に、本発明の基本的な考え方を図1を参照して説明する。図1(a)に示したように、突極型のロータ2を使用した場合、ロータ2とU,V,Wの各電機子3,4,5間のギャップの磁気抵抗は周期的に変化し、その変化はロータ2が1回転する間に2回、すなわちロータ2が半回転する間に1周期分変化する。そして、該磁気抵抗は、ロータ2が図中▲1▼の位置となったときに最大となり、ロータ2が図中▲2▼の位置となったときに最小となる。
【0010】
図1(a)の磁気回路を模式的に表したものが図1(b)であり、前記磁気抵抗の1周期あたりの平均値が0.5であると仮定すると、U,V,Wの各相における磁気抵抗Ru,Rv,Rwは、以下の式(1)〜式(3)で示される。
【0011】
【数1】
【数2】
【数3】
【0014】
【数4】

【0015】
【数5】
【0016】
【数6】
【数7】
【0018】
【数8】
【0019】
さらに、電気角速度ωがほぼ0で誘起電圧やロータ2の角速度変化による影響が小さく、抵抗rによる電圧降下も無視できるレベルである場合には、前記式(8)は、以下の式(9)により近似することができる。
【0020】
【数9】
【0021】
【数10】
【0022】
【数11】
【数12】
【0024】
【数13】
【数14】
【数15】
【数16】
【数17】
【0029】
【数18】
【数19】
【0031】
したがって、以下の式(20)の関係式が導かれる。
【0032】
【数20】
【0033】
【数21】
【0034】
かかる本発明によれば、前記検査用電圧重畳手段により前記駆動電圧に重畳される前記検査用電圧は、前記基本電圧列データ列に前記所定周期ごとに値が変化する前記変調用係数を乗じて生成される。そのため、前記検査用電圧の周波数は前記所定周期ごとに変調されて周波数成分が分散される。そして、これにより、前記駆動電圧に前記検査用電圧を重畳したときに、特定の周波数成分をもった耳障りなノイズが発生することを抑制することができる。
【0035】
また、上記式(11)における微分期間(dt)を前記制御サイクルの長さ(Δt)とし、ある制御サイクルにおける前記駆動電圧と前記検査用電圧をそれぞれv(1),{Hu(1),Hw(1)}とし、該制御サイクルにおける前記電流検出手段の検出電流の変化量を{ΔIu(1),ΔIw(1)}とすると、上記式(11)は以下の式(22)の形で表される。
【0036】
【数22】
【0037】
【数23】
【0038】
【数24】
【0039】
【数25】
【0040】
【数26】
【0041】
【数27】
【0042】
そして、前記基本電圧列データに前記変調用係数を乗じて前記検査用電圧を生成する場合は、上記式(26)における行列Cは、前記基本電圧列データの関数である行列に前記変調用係数を乗じた形で表される。そのため、詳細は後述するが、この場合は、上記式(27)を、前記基本電圧列データにより各成分を予め算出可能な行列と前記変調用係数と検出電流の2階差分(ddIuw)との演算により、前記正弦参照値と前記余弦参照値を算出する形で表すことができる。したがって、前記参照値算出手段は、各制御サイクルにおける前記基本電圧列データと前記電流検出手段の検出電流の変化量と前記変調用係数とにより、前記正弦参照値(Vs)と前記余弦参照値(Vc)を算出することができる。
【0043】
そして、前記ロータ角度検出手段は、例えば以下の式(28)により前記モータのロータ角度(θ)を算出することができる。
【0044】
【数28】
【0045】
かかる本発明によれば、前記第1の態様と同様に、前記検査用電圧の周波数は前記所定周期ごとに変調されて周波数成分が分散される。そして、これにより、前記検査用電圧を重畳したときに、特定の周波数成分をもった耳障りなノイズが発生することを抑制することができる。
【0046】
また、上記式(21)における微分期間(dt)を前記制御サイクルの長さ(Δt)とし、ある制御サイクルにおいて、前記モータのロータ角度の推定値(θ^)に基づいて前記dq/3相電圧変換手段及び前記3相/dq変換手段による変換処理を行ったときの、該制御サイクルにおけるd軸電圧及びq軸電圧と前記検査用電圧をそれぞれv_dq^(1),Hd^(1),Hq^(1)、d軸実電流及びq軸実電流の変化量を{ΔId^( 1),ΔIq^(1)}とすると、上記式(21)は以下の式(29)の形で表される。
【0047】
【数29】
【0048】
【数30】
【0049】
【数31】
【0050】
【数32】
【0051】
【数33】
【0052】
【数34】
【0053】
そして、前記基本電圧データに前記変調用係数を乗じて前記検査用電圧を生成する場合は、上記式(33)における行列C^は、前記基本電圧列データの関数である行列に前記変調用係数を乗じた形で表される。そのため、詳細は後述するが、この場合は、上記式(34)を、前記基本電圧列データにより各成分を予め算出可能な行列と前記変調用係数とd軸実電流及びq軸実電流の2階差分(ddIdq)との演算により、前記正弦参照値と前記余弦参照値を算出する形で表すことができる。したがって、前記参照値算出手段は、各制御サイクルにおける前記基本電圧列データとd軸実電流及びq軸実電流の変化量と前記変調用係数とにより、前記正弦参照値(Vs)と前記余弦参照値(Vc)を算出することができる。
【0054】
そして、前記ロータ角度検出手段は、例えば以下の式(35)により前記モータのロータ角度の実際値(θ)と推定値(θ^)の位相差(θe=θ−θ^)を算出することができ、該推定値(θ^)と該位相差(θe)とによりロータ角度の実際値(θ)を検出することができる。
【0055】
【数35】
【0056】
かかる本発明によれば、前記検査用電圧の重畳により前記駆動電圧又は前記d軸電圧及びq軸電圧に与える影響を減少させることができる。
【0057】
また、前記ロータ角度検出手段は、所定の制御サイクルごとに前記正弦参照値と前記余弦参照値とを算出し、該正弦参照値と余弦参照値を用いて前記モータの実際値(θ)と推定値(θ^)との位相差(θ−θ^)に応じた位相差データを算出し、前回の制御サイクルにおいて算出したモータのロータ角度を前回の制御サイクルにおける前記モータのロータ角度の推定値(θ^)とし、前回の制御サイクルにおいて算出した前記位相差データに応じた前記位相差(θ−θ^)を解消するように該位相差データに基づいて前記モータのロータ角度の推定値(θ^)を逐次更新しつつ算出するオブザーバにより、前記モータのロータ角度を更新することによって、今回の制御サイクルにおける前記モータのロータ角度の推定値(θ^)を算出し、該ロータ角の推定値(θ^)を前記モータのロータ角度とすることを特徴とする。
【0058】
かかる本発明によれば、前記ロータ角度検出手段は、前回の制御サイクルにおいて前記正弦参照値と前記余弦参照値とを用いて算出された前記位相差データと、前回の制御サイクルにおいて検出された前記モータのロータ角度を、前記オブザーバに適用して、今回の制御サイクルにおける前記モータのロータ角度の推定値(θ^)を算出することができる。これにより、前記ロータ角度検出手段は、次回の制御サイクル以降において、前記モータのロータ角度を精度良く検出することができる。
【0059】
【発明の実施の形態】
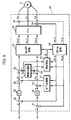
本発明の実施の形態の一例について図1〜図5を参照して説明する。図1はDCブラシレスモータの構成図、図2は第1の実施の形態におけるモータコントローラの制御ブロック図、図3は検査用電圧の周期及び検査用電圧と電機子電流の推移を示した図、図4は検査用電圧の生成方法の説明図、図5は第2の実施の形態におけるモータコントローラの制御ブロック図である。
【0060】
先ず、図1〜図4を参照して、本発明の第1の実施の形態について説明する。図2に示したモータコントローラ10は、図1に示した突極型のDCブラシレスモータ1(以下、モータ1という)の電機子3,4,5に流れる電流をフィードバック制御するものであり、モータ1をロータ2の界磁極の磁束方向であるq軸上にあるq軸電機子と該q軸と直交するd軸上にあるd軸電機子とを有するdq座標系による等価回路に変換して扱う。
【0061】
そして、モータコントローラ10は、外部から与えられるd軸指令電流(Id_c)とq軸指令電流(Iq_c)とに応じて、d軸電機子に流れる電流(以下、d軸電流という)とq軸電機子に流れる電流(以下、q軸電流という)をフィードバック制御する。
【0062】
モータコントローラ10は、d軸電機子への印加電圧(以下、d軸電圧(Vd)という)とq軸電機子への印加電圧(以下、q軸電圧(Vq)という)とを、モータ1のU,V,Wの3相の電機子に印加する駆動電圧(Vu_c,Vv_c,Vw_c)に変換するdq/3相変換部20、該駆動電圧(Vu_c,Vv_c,Vw_c)に検査用電圧(Hu,Hw)を重畳する検査用電圧重畳部21(本発明の検査用電圧重畳手段に相当する)、及び駆動電圧(Vu_c,Vv_c,Vw_c)に検査用電圧(Hu,Hw)を重畳した電圧(Vu,Vv,Vw)をモータ1のU,V,Wの各相の電機子にそれぞれ印加するよう複数のスイッチング素子をブリッジ接続したインバータ回路からなるパワードライブユニット22(本発明の電圧印加手段に相当する)を備える。
【0063】
さらに、モータコントローラ10は、モータ1のU相の電機子に流れる電流を検出するU相電流センサ23(本発明の電流検出手段に相当する)、モータ1のW相の電機子に流れる電流を検出するW相電流センサ24(本発明の電流検出手段に相当する)、U相電流センサ23の検出電流値(Iu_s)とW相電流センサ24の検出電流値(Iw_s)とに応じてd軸電流の検出値であるd軸実電流(Id_s)とq軸電流の検出値であるq軸実電流(Iq_s)とを算出する3相/dq変換部26(本発明の3相/dq電流変換手段に相当する)、モータ1のロータ角度(θ)を検出する角度検出部25(本発明の参照値算出手段とロータ角度検出手段に相当する)、及びd軸とq軸間で干渉し合う速度起電力の影響を打ち消す処理を行なう非干渉演算部27を備える。
【0064】
モータコントローラ10は、d軸指令電流(Id_c)とd軸実電流(Id_s)を第1減算器28で減算し、その減算結果に第1のPI演算部29でPI(比例積分)処理を施し、第1加算器30で非干渉成分を加算して、d軸指令電流(Id_c)とd軸実電流(Id_s)の偏差に応じたd軸電圧(Vd)を生成する。
【0065】
また、モータコントローラ10は、同様にして、q軸指令電流(Iq_c)とq軸実電流(Iq_s)を第2減算器31で減算し、その減算結果に第2のPI演算部32でPI処理を施し、第2加算器33で非干渉成分を加算して、q軸指令電流(Iq_c)とq軸実電流(Iq_s)との偏差に応じたq軸電圧(Vq)を生成する。
【0066】
そして、モータコントローラ10は、d軸電圧(Vd)とq軸電圧(Vq)とをdq/3相変換部20に入力する。これにより、パワードライブユニット22を介して、d軸指令電流(Id_c)とd軸実電流(Id_s)との偏差、及びq軸指令電流(Iq_c)とq軸実電流(Iq_s)との偏差を小さくする3相電圧(Vu,Vv,Vw)がモータ1の電機子に印加されて、モータ1の電機子に流れる電流がフィードバック制御される。
【0067】
ここで、dq/3相変換部20によりd軸電圧(Vd)とq軸電圧(Vq)を3相の電圧指令(Vu_c,Vv_c,Vw_c)に変換する際には、モータ1のロータ角度(θ)が必要となる。また、3相/dq変換部26によりU相電流センサ23の検出電流値(Iu_s)とW相電流センサ24の検出電流値(Iw_s)をd軸実電流(Id_s)とq軸実電流(Iq_s)に変換する際にも、モータ1のロータ角度(θ)が必要となる。
【0068】
そして、モータコントローラ10は、レゾルバ等の位置検出センサを用いずに、第3加算器34及び第4加算器36において、検査用電圧重畳部21により駆動電圧(Vu_c,Vv_c,Vw_c)に検査用電圧(Hu,Hw)を重畳することによって、ロータ角度(θ)の検出処理を行う。以下、モータコントローラ10におけるロータ角度(θ)の検出処理について説明する。
【0069】
なお、モータコントローラ10は本発明のDCブラシレスモータのロータ角度検出装置の機能を含み、パワードライブユニット22、検査用電圧重畳部21、及び角度検出部25により、本発明のDCブラシレスモータのロータ角度検出装置が構成される。
【0070】
先ず、検査用電圧重畳部21は、図3(a)に示したように、コントローラ10の制御サイクル(Δt)のn周期分{t(1)〜t(n)}を1周期(T)とする検査用電圧Huw(Hu,Hw)を、以下の式(36)により生成する。なお、本実施の形態では、検査用電圧重畳部21は、駆動電圧のU相及びW相(Vu_c,Vw_c)に検査用電圧(Hu,Hw)を重畳しているが、他の組合わせにより駆動電圧のいずれかの2相に検査用電圧を重畳してもよい。
【0071】
【数36】
【0072】
なお、基本電圧列データ(dhuw={dhuw(1),dhuw(2),…,dhuw(n)})は、予めメモリ(図示しない)に記憶されている。また、変調信号(s)のデータ{s(1),s(2),…}は、予めメモリに記憶してもよく、信号処理でよく使用されるM系列等の手法を用いて生成してもよい。そして、変調信号(s)のデータを極力ランダムに変化させることにより、検査用電圧の周波数成分をより拡散させて、特定周波数のノイズが発生することを抑制することができる。
【0073】
また、基本電圧列データ(dhuw)は、以下の式(37)に示したように、1周期における平均が0となるように設定されている。
【0074】
【数37】
【0075】
そして、角度検出部25は、検査用電圧重畳部21により検査用電圧(Hu,Hw)が重畳されたときに、各制御サイクル(t(1)〜t(n))におけるU相電流センサ22の検出電流値(Iu_s)とW相電流センサ23の検出電流値(Iw_s)の変化量を用いてモータ1のロータ角度を検出する。
【0076】
ここで、検査用電圧(Hu,Hw)のk番目の周期T(k)の制御サイクルt(i)におけるU相電流センサ22の検出電流値(Iu_s)の2階差分とW相電流センサ24の検出電流値(Iw_s)の2階差分を、以下の式(38)に示したようにそれぞれddIu(i+k・n),ddIw(i+k・n)とする。
【0077】
【数38】
【0078】
【数39】
【数40】
【0080】
【数41】
【0081】
【数42】
【数43】
【数44】
【0084】
そして、検査用電圧(Hu,Hw)は、上記式(36)により、周期Tの一定の電圧出力パターンが設定された基本電圧列データ(dhuw)と変調信号(s)とを乗じて生成される。そのため、基本電圧列データ(dhuw)に応じて算出される上記式(41)の行列c(i)の成分は一定となる。したがって、上記式(43)における行列Cの成分も一定となり、行列Cに基づいて算出される上記式(44)の行列Dの成分も一定となる。
【0085】
そこで、モータコントローラ10のメモリには、基本電圧列データ(dhuw)により予め算出された行列Dの成分のデータが記憶されており、角度検出部25は、メモリに記憶された行列Dの成分のデータを用いて上記式(44)の演算を実行する。
【0086】
この場合、角度検出部25は、行列Dの成分と検出電流の2階差分(ddIuw)及び変調信号(s)間の簡単な演算によりロータ角度(θ)の2倍角に応じた正弦参照値(Vs=3Δlsin2θ)と余弦参照値(Vc=3Δlcos2θ)を算出することができ、正弦参照値と余弦参照値の算出時間を短縮することができる。
【0087】
そして、角度検出部25は、以下の式(45)によりモータ1のロータ角度(θ)を算出する。
【0088】
【数45】
【0089】
モータ1が一定の角速度で回転しているとすると、制御サイクル(Δt)ごとのロータ角度(θ)と角速度(ω)との関係は以下の式(46)で表される。
【0090】
【数46】
【0091】
そして、ロータ角度の実際値(θ)と推定値(θ^)との位相差(θ−θ^)を以下の式(47)により算出し、上記式(46)に、ロータ角度の推定値(θ^)と角速度の推定値(ω^)を入力して、該位相差(θ−θ^)に演算ゲインK1,K2,K~によるゲインを乗じてフィードバックする以下の式(48)に示した演算を実行する。
【0092】
【数47】
【数48】
【0094】
なお、上記式(47)の√(Vs2+Vc2)の演算は時間がかかるので、以下の式(49)により近似してもよい。
【0095】
【数49】
【0096】
この場合、図4(a)に示した一定周期Tの交流電圧xは、f=1/Tの周波数成分を多く含んでいるため、駆動電圧(Vu,Vw)に重畳したときに該周波数fに偏ったノイズが生じる。そこで、図4(b)に示したように、1周期の出力(x)の次の1周期の出力を反転(−x)することにより、周波数fの周波数成分を打ち消すことができる。
【0097】
そして、図4(c)に示したように、周波数成分を順次打ち消すように変調を行うことにより、周波数のスペクトラムがさらに拡散される。これにより、特定周波数に偏った耳障りなノイズの発生を抑制することができる。
【0098】
また、上記式(43)が成り立つときに、上記式(44)となる行列Dは一意には決まらない。例えば、重み付き最小2乗法として知られているように、正則な重み行列Wを用いて、以下の式(50),式(51)によりDを決定してもよい。
【0099】
【数50】
【数51】
【0101】
【数52】
【0102】
【数53】
【数54】
【0104】
そして、行列Mmに対して、以下の式(55),式(56)が成り立つ。
【0105】
【数55】
【数56】
【0107】
【数57】
【0108】
なお、モータコントローラ40は本発明のDCブラシレスモータのロータ角度検出装置の機能を含み、dq/3相変換部20、3相/dq変換部26、パワードライブユニット22、角度検出部50、及び検査用電圧重畳部51により本発明のDCブラシレスモータのロータ角度検出装置が構成される。また、図2に示したモータコントローラ10と同様な構成については、同一の符号を付して説明を省略する。
【0109】
検査用電圧重畳部51は、第5加算器52でd軸電圧(Vd)に検査用電圧(Hd)を重畳し、第6加算器53でq軸電圧(Vq)に検査用電圧(Hq)を重畳する。また、角度検出部50は、検査用電圧(Hd,Hq)が重畳されたときに、モータ1のロータ角度の推定値(θ^)に基づいて3相/dq電流変換部26により算出されたd軸実電流(Id_s^)及びq軸実電流(Iq_s^)を用いて、モータ1のロータ角度を検出する。以下、モータコントローラ40におけるモータ1のロータ角度の検出処理について説明する。
【0110】
検査用電圧重畳部51は、上述した第1の実施の形態と同様に、図3(a)に示したように、モータコントローラ40の制御サイクル(Δt)のn周期分を1周期とする検査用電圧(Hd^,Hq^)を、以下の式(58)により生成する。
【0111】
【数58】
【0112】
なお、基本電圧列データ(dhdq^={dhdq^(1),dhdq^(2),…,dhdq^(n)})のデータは、予めメモリ(図示しない)に記憶されている。また、変調信号(s)のデータ{s(1),s(2),…}は、予めメモリに記憶してもよく、信号処理でよく使用されるM系列等の手法を用いて生成してもよい。
【0113】
また、基本電圧列データ(dhdq^={dhdq^(1),dhdq^(2),…,dhdq^(n)})は、以下の式(59)に示したように、1周期における平均が0となるように設定されている。
【0114】
【数59】
【0115】
そして、角度検出部50は、検査用電圧重畳部51により検査用電圧(Hd^,Hq^)が重畳されたときに、各制御サイクル(t(1)〜t( n))において、モータ1のロータ角度の推定値(θ^)に基づいて3相/電流変換部26により算出されるd軸実電流及びq軸実電流を用いてモータ1のロータ角度を検出する。
【0116】
ここで、検査用電圧(Hd^,Hq^)のk番目の制御サイクルT(k)の制御サイクルt(i)におけるd軸実電流の2階差分とq軸実電流の2階差分を、以下の式(60)に示したようにそれぞれddId^(i+k・n),ddIq^(i+k・n)とする。
【0117】
【数60】
【0118】
【数61】
【数62】
【0120】
【数63】
【0121】
【数64】
【数65】
【数66】
【0124】
この場合、角度検出部50は、行列D^の成分と各制御期間における検出電流の2階差分(ddIdq^)及び変調信号(s)間の簡易な演算によりロータ角度の実際値(θ)と推定値(θ^)との位相差(θe=θ−θ^)の2倍角に応じた正弦参照値(Vs^=L1sin2θe)と余弦参照値(Vc^=L1cos2θe)を算出することができる。そのため、正弦参照値(Vs^)と余弦参照値(Vc^)の算出時間を短縮することができる。
【0125】
そして、角度検出部50は、以下の式(67)によりモータ1のロータ角度の実際値(θ)と推定値(θ^)との位相差(θe)を算出して、ロータ角度(θ=θ^+θe)を検出する。
【0126】
【数67】
【0127】
【数68】
【数69】
【0129】
なお、上記式(69)における√(Vs^2+Vc^2)の演算は時間がかかるので、以下の式(70)により近似してもよい。
【0130】
【数70】
【図面の簡単な説明】
【図1】DCブラシレスモータの構成図。
【図2】第1の実施の形態におけるモータコントローラの制御ブロック図。
【図3】図3は検査用電圧の周期及び検査用電圧と電機子電流の推移を示した図。
【図4】検査用電圧の生成方法の説明図。
【図5】第2の実施の形態におけるモータコントローラの制御ブロック図。
【符号の説明】
1…DCブラシレスモータ、2…ロータ、3…U相の電機子、4…V相の電機子、5…W相の電機子、10…モータコントローラ、20…dq/3相変換部、21…検査用電圧重畳部、22…パワードライブユニット、23…U相電流センサ、24…W相電流センサ、25…角度検出部、26…3相/dq変換部、27…非干渉演算部、40…モータコントローラ、50…角度検出部、51…検査用電圧重畳部
Claims (4)
- DCブラシレスモータの3相の電機子に駆動電圧を印加する電圧印加手段と、該駆動電圧に、所定周期における一定の電圧出力パターンが設定された基本電圧列データに、該所定周期ごとに値が変化する変調用係数を乗じて生成された検査用電圧を重畳する検査用電圧重畳手段と、前記モータの電機子に流れる電流を検出する電流検出手段と、
該検査用電圧重畳手段により前記駆動電圧に前記検査用電圧が重畳されたときに、前記所定周期内において、所定の制御サイクルで前記電流検出手段の検出電流を参照し、各制御サイクルにおける前記電流検出手段による検出電流の変化量と前記基本電圧列データと前記変調用係数とに基づいて、前記モータのロータ角度の2倍角の正弦値に応じた正弦参照値と該2倍角の余弦値に応じた余弦参照値とを算出する参照値算出手段と、
該正弦参照値と該余弦参照値とに基づいて前記モータのロータ角度を検出するロータ角度検出手段とを備えたことを特徴とするDCブラシレスモータのロータ角度検出装置。 - DCブラシレスモータを、該モータの界磁の磁束方向であるq軸上にあるq軸電機子と該q軸と直交するd軸上にあるd軸電機子とを有する等価回路に変換して扱い、
前記d軸電機子に印加するd軸電圧と前記q軸電機子に印加するq軸電圧を、前記モータのロータ角度に基づいて3相の駆動電圧に変換するdq/3相電圧変換手段と、該駆動電圧を前記モータの3相の電機子に印加する電圧印加手段と、
d軸電圧とq軸電圧に、所定周期における一定の電圧出力パターンが設定された基本電圧列データに、該所定周期ごとに値が変化する変調用係数を乗じて生成された検査用電圧を重畳する検査用電圧重畳手段と、
前記モータの3相の電機子に流れる電流を検出する電流検出手段と、該電流検出手段による検出電流と前記モータのロータ角度とに基づいて、前記d軸電機子に流れるd軸実電流と前記q軸電機子に流れるq軸実電流とを算出する3相/dq電流変換手段と、
前記検査用電圧重畳手段によりd軸電圧及びq軸電圧に前記検査用電圧が重畳されたときに、前記所定周期内において、所定の制御サイクルで前記d軸実電流と前記q軸実電流を参照し、各制御サイクルにおける該d軸実電流及び該q軸実電流の変化量と前記基本電圧列データと前記変調用係数とに基づいて、前記モータのロータ角度の実際値(θ)と推定値(θ^)との位相差(θ−θ^)の2倍角の正弦値に応じた正弦参照値と、該位相差(θ−θ^)の2倍角の余弦値に応じた余弦参照値とを算出する参照値算出手段と、
該正弦参照値と該余弦参照値とに基づいて、前記モータのロータ角度を検出するロータ角度検出手段とを備えたことを特徴とするDCブラシレスモータのロータ角度検出装置。 - 前記基本電圧列データは、前記電圧出力パターンにおける出力電圧の平均が0となるように設定されていることを特徴とする請求項1又は請求項2記載のDCブラシレスモータのロータ角度検出装置。
- 前記ロータ角度検出手段は、所定の制御サイクルごとに前記正弦参照値と前記余弦参照値とを算出し、該正弦参照値と余弦参照値を用いて前記モータの実際値(θ)と推定値(θ^)との位相差(θ−θ^)に応じた位相差データを算出し、
前回の制御サイクルにおいて算出したモータのロータ角度を前回の制御サイクルにおける前記モータのロータ角度の推定値(θ^)とし、前回の制御サイクルにおいて算出した前記位相差データに応じた前記位相差(θ−θ^)を解消するように該位相差データに基づいて前記モータのロータ角度の推定値(θ^)を逐次更新しつつ算出するオブザーバにより、前記モータのロータ角度を更新することによって、今回の制御サイクルにおける前記モータのロータ角度の推定値(θ^)を算出し、該ロータ角の推定値(θ^)を前記モータのロータ角度とすることを特徴とする請求項1から請求項3のうちいずれか1項記載のDCブラシレスモータのロータ角度検出装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002280408A JP3919003B2 (ja) | 2002-09-26 | 2002-09-26 | Dcブラシレスモータのロータ角度検出装置 |
| US10/669,327 US6909290B2 (en) | 2002-09-26 | 2003-09-25 | Rotor angle detecting apparatus for DC brushless motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002280408A JP3919003B2 (ja) | 2002-09-26 | 2002-09-26 | Dcブラシレスモータのロータ角度検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004120888A JP2004120888A (ja) | 2004-04-15 |
| JP3919003B2 true JP3919003B2 (ja) | 2007-05-23 |
Family
ID=32040481
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002280408A Expired - Fee Related JP3919003B2 (ja) | 2002-09-26 | 2002-09-26 | Dcブラシレスモータのロータ角度検出装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US6909290B2 (ja) |
| JP (1) | JP3919003B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109884523A (zh) * | 2019-03-11 | 2019-06-14 | 重庆长安新能源汽车科技有限公司 | 一种电驱动系统的下线检测方法及系统 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4682545B2 (ja) * | 2004-06-25 | 2011-05-11 | ダイキン工業株式会社 | モータの回転位置角推定方法及びモータの回転位置角推定装置並びにインバータ制御方法及びインバータ制御装置 |
| JP4459778B2 (ja) * | 2004-10-19 | 2010-04-28 | 本田技研工業株式会社 | Dcブラシレスモータのロータ角度検出方法及びdcブラシレスモータの制御装置 |
| JP4653640B2 (ja) * | 2005-11-17 | 2011-03-16 | 本田技研工業株式会社 | Dcブラシレスモータのロータ角度推定方法及びdcブラシレスモータの制御装置 |
| JP4716118B2 (ja) * | 2006-03-29 | 2011-07-06 | 株式会社ジェイテクト | モータ制御装置 |
| JP5011824B2 (ja) * | 2006-05-31 | 2012-08-29 | 株式会社ジェイテクト | 異常判定装置 |
| JP4637148B2 (ja) * | 2007-08-27 | 2011-02-23 | 株式会社日立製作所 | 電力変換装置 |
| JP4889808B2 (ja) * | 2008-04-09 | 2012-03-07 | 三菱電機株式会社 | 磁極位置検出装置及び方法 |
| FI121616B (fi) * | 2008-04-24 | 2011-01-31 | Kone Corp | Sähkökoneen roottorin asennon määritys |
| MX2013001122A (es) * | 2010-07-28 | 2013-03-12 | Mitsubishi Electric Corp | Aparato de control para maquina giratoria de ca. |
| FR3017325B1 (fr) * | 2014-02-13 | 2016-04-22 | Sidel Participations | Installation de conditionnement thermique de preformes avec refroidissement d'une portion de la preforme par une lame d'air pulse |
| CN105116333B (zh) * | 2015-09-14 | 2017-11-03 | 南京工程学院 | 多旋翼飞行器电机拉力线性度测量装置及其控制系统和方法 |
| EP3264586B1 (en) * | 2016-06-28 | 2020-04-29 | STMicroelectronics Design and Application s.r.o. | A method of controlling electric motors, corresponding device and motor |
| JP6750364B2 (ja) | 2016-07-22 | 2020-09-02 | 株式会社デンソー | 回転電機の回転角推定装置 |
| JP7205117B2 (ja) * | 2018-09-06 | 2023-01-17 | 株式会社アドヴィックス | モータ制御装置 |
| US11353337B2 (en) | 2020-11-03 | 2022-06-07 | Semiconductor Components Industries, Llc | Offset cancel systems and methods for resolver-type sensors |
| CN116073713B (zh) * | 2022-10-25 | 2024-08-30 | 华北电力大学 | 变矢量序列感应电机无模型预测电流控制方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09178512A (ja) * | 1995-12-28 | 1997-07-11 | Mitsubishi Electric Corp | センサシステム及びセンサ |
| JP3282541B2 (ja) | 1997-05-21 | 2002-05-13 | 株式会社日立製作所 | モータ制御装置 |
| JP3953189B2 (ja) | 1998-05-15 | 2007-08-08 | 東洋電機製造株式会社 | 永久磁石形同期電動機の制御装置 |
| JPH11356085A (ja) * | 1998-06-10 | 1999-12-24 | Aisin Seiki Co Ltd | 電気モータのコイル短絡検出装置 |
| US6448724B1 (en) * | 1999-10-28 | 2002-09-10 | Delphi Technologies, Inc. | Apparatus and method for commutation noise reduction |
| JP3529752B2 (ja) * | 2001-02-16 | 2004-05-24 | 本田技研工業株式会社 | Dcブラシレスモータのロータ角度検出装置 |
| JP2002345288A (ja) * | 2001-05-15 | 2002-11-29 | Toshiba Tec Corp | 三相ブラシレス電動機の起動方法、その駆動制御回路、電動送風機及び電気掃除機 |
| JP3630410B2 (ja) * | 2001-05-22 | 2005-03-16 | 三菱電機株式会社 | 位置検出装置および異常検出装置 |
| JP3914107B2 (ja) * | 2002-07-12 | 2007-05-16 | 本田技研工業株式会社 | Dcブラシレスモータの制御装置 |
| JP3914108B2 (ja) * | 2002-07-15 | 2007-05-16 | 本田技研工業株式会社 | Dcブラシレスモータの制御装置 |
| JP3967642B2 (ja) * | 2002-07-26 | 2007-08-29 | 株式会社ジェイテクト | 車両用操舵制御システム |
| JP3920750B2 (ja) * | 2002-09-24 | 2007-05-30 | 本田技研工業株式会社 | Dcブラシレスモータの制御装置 |
-
2002
- 2002-09-26 JP JP2002280408A patent/JP3919003B2/ja not_active Expired - Fee Related
-
2003
- 2003-09-25 US US10/669,327 patent/US6909290B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109884523A (zh) * | 2019-03-11 | 2019-06-14 | 重庆长安新能源汽车科技有限公司 | 一种电驱动系统的下线检测方法及系统 |
| CN109884523B (zh) * | 2019-03-11 | 2021-08-13 | 重庆长安新能源汽车科技有限公司 | 一种电驱动系统的下线检测方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20040066205A1 (en) | 2004-04-08 |
| US6909290B2 (en) | 2005-06-21 |
| JP2004120888A (ja) | 2004-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3919003B2 (ja) | Dcブラシレスモータのロータ角度検出装置 | |
| JP4263582B2 (ja) | ブラシレスモータ制御装置 | |
| JP3529752B2 (ja) | Dcブラシレスモータのロータ角度検出装置 | |
| US9294019B2 (en) | Method and apparatus for controlling power converter with inverter output filter | |
| JP5781235B2 (ja) | 同期機制御装置 | |
| JP2011211815A (ja) | 永久磁石モータの制御装置 | |
| JP5428202B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP5321792B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP2019075868A (ja) | モータ制御装置およびモータシステム | |
| JP2004048958A (ja) | Dcブラシレスモータの制御装置 | |
| CN109451782B (zh) | 电动助力转向装置 | |
| JP6248847B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP3920750B2 (ja) | Dcブラシレスモータの制御装置 | |
| JP3914107B2 (ja) | Dcブラシレスモータの制御装置 | |
| WO2020105204A1 (ja) | 電力変換装置 | |
| JP2010035352A (ja) | 同期電動機のロータ位置推定装置 | |
| JP2006158046A (ja) | 交流電動機のセンサレス制御方法および装置 | |
| JP4146733B2 (ja) | Dcブラシレスモータの制御装置 | |
| JP7154987B2 (ja) | 永久磁石同期電動機の制御装置,マイクロコンピュータ,電動機システム及び永久磁石同期電動機の運転方法 | |
| JP3674638B2 (ja) | 誘導電動機の速度推定方法および誘導電動機駆動装置 | |
| JP4119183B2 (ja) | Dcブラシレスモータのロータ角度検出装置 | |
| JP4119195B2 (ja) | Dcブラシレスモータのロータ角度検出装置 | |
| JP4119184B2 (ja) | Dcブラシレスモータのロータ角度検出装置 | |
| JP4684691B2 (ja) | ブラシレスdcモータの制御装置 | |
| JP7163641B2 (ja) | 同期電動機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061201 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070207 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3919003 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100223 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110223 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110223 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120223 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120223 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130223 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130223 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140223 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |