JP3860552B2 - 撮影装置 - Google Patents
撮影装置 Download PDFInfo
- Publication number
- JP3860552B2 JP3860552B2 JP2003083928A JP2003083928A JP3860552B2 JP 3860552 B2 JP3860552 B2 JP 3860552B2 JP 2003083928 A JP2003083928 A JP 2003083928A JP 2003083928 A JP2003083928 A JP 2003083928A JP 3860552 B2 JP3860552 B2 JP 3860552B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- photographed
- photographing
- unit
- guidance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/64—Computer-aided capture of images, e.g. transfer from script file into camera, check of taken image quality, advice or proposal for image composition or decision on when to take image
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
- H04N23/633—Control of cameras or camera modules by using electronic viewfinders for displaying additional information relating to control or operation of the camera
- H04N23/634—Warning indications
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Description
【発明の属する技術分野】
本発明は、物体を撮影する撮影装置に係わり、特に、被撮影物体を適切な位置または状態に誘導する機能を備えた撮影装置に係わる。
【0002】
【従来の技術】
撮影装置を用いて物体を撮影し、その撮影により得られた画像を利用してその物体を識別する技術は知られている。(例えば、特許文献1参照。)
特許文献1に記載のシステムは、カメラおよびそのカメラで撮影した画像を表示する表示装置を備える。そして、表示装置には、カメラにより撮影された撮影対象物の画像、および撮影対象物が適切な位置に配置された状態で撮影されたならば得られるであろう画像の輪郭(基準輪郭)を、重ね合わせて表示する。これにより、ユーザは、撮影対象物の位置を修正することができ、適切な位置に配置された状態でその撮影対象物の画像を得ることができる。
【0003】
また、カメラを用いて撮影された物体の画像をもとにその物体を所定の位置に誘導する技術も知られている。(例えば、特許文献2参照。)
ただし、特許文献2に記載のシステムは、駐車場等に設けられ、撮影された画像から自動車が検出されたときに、メッセージの表示やランプの点滅等を利用して、その自動車を所定の経路に沿って目的地に誘導するものである。即ち、このシステムは、最適な撮影を行える位置に被撮影物体を誘導するものではない。
【0004】
【特許文献1】
特開2001−273498号公報(図12〜図14、段落0070〜0073参照)
【特許文献2】
特開昭64−55674号公報(第2ページ)
【0005】
【発明が解決しようとする課題】
特許文献1に記載の方法では、ユーザが、表示装置に表示された基準輪郭を見ながら撮影対象物の位置を修正することになる。すなわち、この方法では、基準輪郭および撮影画像を表示するための表示装置が必須要件となる。
【0006】
また、この方法では、ユーザは、撮影対象物を撮影のための適切な位置に移動させることは可能であるが、その物体が撮影のために好適な姿勢になっているか否かを確認することはできない。ここで、「姿勢」とは、その物体のカメラに対する角度または傾きを含む概念である。
【0007】
本発明の目的は、撮影装置で物体を撮影することにより得られる画像を利用してその物体を識別する際の識別精度を向上させることである。また、被撮影物体を適切な位置または姿勢に誘導することである。
【0008】
【課題を解決するための手段】
本発明の撮影装置は、物体を撮影する撮影手段、上記物体の目標撮影状態を表す目標撮影状態情報を記憶する目標撮影状態記憶手段、上記目標撮影状態情報および上記撮影手段により撮影された画像に基づいて上記物体をどのように誘導すべきかを判定する誘導判定手段、上記誘導判定手段による判定結果に基づいて上記物体をどのように誘導すべきかを指示する誘導指示出力手段、上記撮影手段により撮影された画像を出力する画像出力手段、を有する。
【0009】
この撮影装置においては、実際に撮影された画像の状態と目標撮影状態とを比較することにより、その物体をどのように誘導すべきかが判定される。そして、その判定結果に基づいて上記物体をどのように誘導すべきかの指示がされる。よって、その誘導指示に従って上記物体を移動または回転させれば、上記物体の状態を、目標撮影状態に近づけることができる。この結果、目的に応じた良好な画像が得られる。
【0010】
上記撮影装置において、目標撮影状態情報として上記物体の目標位置を定義しておき、誘導判定手段が上記物体を誘導すべき方向を判定するようにしてもよい。この場合、上記物体が目標位置に誘導されて撮影されるので、良好な画像が得られる。
【0011】
また、上記撮影装置において、目標撮影状態情報として上記物体の目標姿勢を定義しておき、誘導判定手段が上記物体を誘導すべき回転方向を判定するようにしてもよい。この場合、上記物体が目標姿勢に誘導されて撮影されるので、良好な画像が得られる。
【0012】
本発明の他の態様の撮影装置は、撮影手段、上記撮影手段を用いて背景画像を撮影した場合の目標撮影状態を表す目標撮影状態情報を記憶する目標撮影状態記憶手段、上記目標撮影状態情報および上記撮影手段により撮影された画像に基づいて上記撮影手段を誘導すべき方向または角度を判定する誘導判定手段、上記誘導判定手段による判定結果に基づいて上記撮影手段を誘導すべき方向または角度を指示する誘導指示出力手段、を有する。
【0013】
この撮影装置においては、撮影手段の位置または角度が最適化されるので、良好な背景画像が得られ、撮影した画像から被撮影物体の画像を正確に切り出すことが可能となる。
【0014】
【発明の実施の形態】
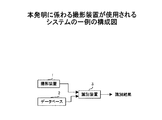
図1は、本発明に係わる撮影装置が使用されるシステムの一実施例の構成図である。このシステムは、物体を撮影する撮影装置1、1または複数の物体の画像データが登録されるデータベース2、撮影装置1により撮影された画像とデータベース2に登録されている各画像とを比較することにより、撮影装置1により撮影された物体を識別する(あるいは、撮影装置1により撮影された物体がデータベース2に登録されているか否かを判別する)識別装置3を備える。
【0015】
このシステムにおいて識別精度を向上させるためには、物体を撮影する際に、その物体が適切な位置に適切な姿勢で配置されている必要がある。従って、本発明に係わる撮影装置は、撮影対象の物体を適切な位置および姿勢に誘導する機能を備えている。そして、このシステムのユーザは、上記誘導に従って物体を移動させたり、あるいはその物体を回転させたりすることができる。なお、「物体の姿勢」とは、その物体のカメラに対する角度または傾きを含む概念である。
【0016】
図2は、第1の実施形態の撮影装置の構成図である。第1の実施形態の撮影装置10は、撮影部11、撮影画像記憶部12、目標撮影状態記憶部13、誘導方向判定部14、誘導方向指示出力部15、および撮影画像出力制御部16を備える。
【0017】
撮影部11は、カメラであり、撮影した画像の画像データを出力する。なお、この画像データは、特に限定されるものではないが、例えば、ビットマップ形式のデジタルデータである。撮影画像記憶部12は、撮影部11から出力される画像データを記憶する。
【0018】
目標撮影状態記憶部13は、被撮影物体の目標撮影状態を表す目標撮影状態情報を記憶する。ここで、目標撮影状態情報は、撮影時に被撮影物体を配置すべき目標位置を表す情報を含む。なお、目標位置とは、被撮影物体がその位置に配置された状態で撮影されたならばその物体の特徴を十分に検出できるような位置をいう。この場合、目標撮影状態情報は、被撮影物体またはそれと同等な物体を目標位置に配置させた状態で撮影することによって予め得られる画像データであってもよい。
【0019】
誘導方向判定部14は、目標撮影状態情報を参照し、撮影部11により撮影された被撮影物体が適切な位置に配置されているか否かを判定すると共に、被撮影物体が適切な位置に配置されていない場合には、被撮影物体をどの方向に誘導すべきか、を判定する。なお、誘導方向判定部14は、撮影画像記憶部12に記憶されている画像データを解析してその特徴を抽出する特徴抽出部17を備え、特徴抽出部17の出力に基づいて被撮影物体を認識できるものとする。
【0020】
誘導方向指示出力部15は、誘導方向判定部14による判定結果をユーザに通知する。すなわち、被撮影物体が適切な位置に配置されていた場合には、その旨をユーザに通知する。一方、被撮影物体が適切な位置に配置されていなかった場合には、被撮影物体を移動すべき方向をユーザに提示する。これにより、ユーザは、被撮影物体を撮影のための適切な位置に配置することができる。
【0021】
撮影画像出力制御部16は、撮影画像記憶部12に記憶されている画像データを出力する。ここで、この画像データは、例えば、図1に示す識別装置3に送られる。なお、撮影画像出力制御部16は、誘導方向判定部14によって被撮影物体が適切な位置に配置されていると判定された場合にのみ、撮影画像記憶部12に記憶されている画像データを出力するようにしてもよい。即ち、被撮影物体が適切な位置に配置されていると判定された場合には、その状態で撮影されたときの画像は、被撮影物体を識別するために十分に良好な画像であると見込まれるので、その場合に限ってその画像データが識別装置3に送られるようにすれば、識別精度の向上が図れる。
【0022】
次に、図3〜図5を参照しながら、第1の実施形態の撮影装置10の動作を説明する。なお、ここでは、目標撮影状態記憶部13には、目標撮影状態情報として、被撮影物体またはそれと同等な物体を目標位置に配置させた状態で撮影することによって得られた目標画像が予め記憶されているものとする。
【0023】
図3に示す例では、被撮影物体が目標位置から上方にずれた位置に配置されている。この場合、まず、撮影部11により得られた撮影画像が撮影画像記憶部12に記憶される。続いて、誘導方向判定部14は、撮影画像記憶部12に記憶されている撮影画像と、目標撮影状態情報として目標撮影状態記憶部13に登録されている目標画像とを比較する。この結果、被撮影物体が目標位置に対して上方にずれた位置に配置されていることが検出される。そして、誘導方向指示出力部15は、誘導方向判定部14による検出結果を出力する。具体的には、例えば、「下方向に移動させてください。」というメッセージが出力される。
【0024】
図4に示す例では、被撮影物体が撮影部11に近づきすぎている。この場合、撮影画像記憶部12に記憶されている撮影画像と、目標撮影状態記憶部13に登録されている目標画像とを比較すると、撮影画像の中に写っている被撮影物体が目標画像の中に写っている被撮影物体よりも大きいことが検出される。これにより、誘導方向判定部14は、被撮影物体が撮影部11に近づきすぎていることを検出する。そして、誘導方向指示出力部15は、誘導方向判定部14による検出結果を出力する。具体的には、例えば、「カメラから遠ざけてください。」というメッセージが出力される。
【0025】
図5に示す例では、被撮影物体が撮影部11から離れすぎている。この場合、撮影画像記憶部12に記憶されている撮影画像と、目標撮影状態記憶部13に登録されている目標画像とを比較すると、撮影画像の中に写っている被撮影物体が目標画像の中に写っている被撮影物体よりも小さいことが検出される。これにより、誘導方向判定部14は、被撮影物体が撮影部11から離れすぎていることを検出する。そして、誘導方向指示出力部15は、誘導方向判定部14による検出結果を出力する。具体的には、例えば、「カメラに近づけてください。」というメッセージが出力される。
【0026】
このように、第1の実施形態の撮影装置10は、被撮影物体が目標位置からずれた位置に配置されていた場合には、その被撮影物体を目標位置に誘導するメッセージを出力する。これにより、ユーザは、容易に被撮影物体を目標位置に移動させることができる。この結果、その物体が良好な状態で撮影された画像が得られるので、物体の識別精度が向上する。
【0027】
図6は、第1の実施形態の撮影装置10の動作を示すフローチャートである。なお、目標撮影状態記憶部13には、予め目標撮影状態情報が登録されているものとする。
【0028】
ステップS1では、まず、撮影部11が撮影を行う。そして、撮影部11により撮影された画像が撮影画像記憶部12に記憶される。ステップS2では、撮影画像記憶部12に記憶された画像を解析することにより、「現在の撮影状態」を算出する。なお、「撮影状態」とは、図3〜図5に示す例では、被撮影物体の位置を意味する。
【0029】
ステップS3、S4では、ステップS2で得られた「現在の撮影状態」と目標撮影状態記憶部13に記憶されている「目標撮影状態」とを比較する。なお、図3〜図5に示す例では、画像内における被撮影物体の位置や大きさ等が比較される。そして、「現在の撮影状態」が「目標撮影状態」の範囲内であった場合は、被撮影物体が目標位置に配置されているものとみなし、誘導処理を終了する。一方、「現在の撮影状態」が「目標撮影状態」の範囲内でなかった場合には、被撮影物体が目標位置に配置されていないものとみなし、ステップS5〜S6の誘導処理を実行する。
【0030】
ステップS5では、被撮影物体を誘導すべき方向を決定する。ここで、誘導方向は、「「現在の撮影状態」を「目標撮影状態」に近づけるような方向」として算出される。なお、具体例については、図3〜図5を参照しながら説明した通りである。そして、ステップS6において、ユーザに対して誘導方向を通知するためのメッセージを出力する。これにより、ユーザは、被撮影物体を目標位置に近づけることができる。この後、ステップS1に戻り、次の画像を撮影する。
【0031】
上記フローチャートの処理は、被撮影物体が目標位置に配置されるまで繰り返し実行される。そして、被撮影物体が目標位置に配置された時点で誘導処理は終了する。
【0032】
図7は、第2の実施形態の撮影装置の構成図である。第1の実施形態の撮影装置20は、撮影部11、撮影画像記憶部12、目標撮影状態記憶部21、誘導姿勢判定部22、誘導姿勢指示出力部23、および撮影画像出力制御部16を備える。なお、撮影部11、撮影画像記憶部12、撮影画像出力制御部16については、第1の実施形態において説明した通りである。
【0033】
目標撮影状態記憶部21は、被撮影物体の目標撮影状態を表す目標撮影状態情報を記憶する。ここで、この目標撮影状態情報は、撮影時における被撮影物体の目標姿勢を表す情報を含む。なお、目標姿勢とは、被撮影物体がその姿勢で撮影されたならばその物体の特徴を十分に検出できるような姿勢をいう。この場合、目標撮影状態情報は、被撮影物体またはそれと同等な物体を目標姿勢にさせた状態で撮影することにより予め得られる画像データであってもよい。
【0034】
誘導姿勢判定部22は、目標撮影状態情報を参照し、撮影部11により撮影された被撮影物体が適切な姿勢であるか否かを判定すると共に、被撮影物体が適切な姿勢でなかった場合には、被撮影物体をどのように回転させるのか、を判定する。なお、誘導姿勢判定部22は、撮影画像記憶部12に記憶されている画像データを解析してその特徴を抽出する特徴抽出部17を備え、特徴抽出部17の出力に基づいて被撮影物体の姿勢を認識できるものとする。
【0035】
誘導姿勢指示出力部23は、誘導姿勢判定部22による判定結果をユーザに通知する。すなわち、被撮影物体が適切な姿勢であった場合には、その旨をユーザに通知する。一方、被撮影物体が適切な姿勢でなかった場合には、被撮影物体を回転させるべき方向および回転量をユーザに提示する。これにより、ユーザは、被撮影物体を撮影のために適切な姿勢に修正することができる。
【0036】
次に、図8〜図9を参照しながら、第2の実施形態の撮影装置20の動作を説明する。
図8に示す例では、被撮影物体の形状が立方体であるものとする。また、目標撮影状態記憶部21には、目標撮影状態情報として、被撮影物体またはそれと同等な物体を目標姿勢にした状態で撮影することにより得られた目標画像が予め記憶されているものとする。この例では、立方体のある一面がカメラに向いている状態が目標姿勢である。したがって、目標画像の中に写っている物体の形状は、正方形になっている。
【0037】
この例では、被撮影物体の姿勢が左側に傾いている。この場合、撮影画像記憶部12に記憶されている撮影画像と、目標撮影状態記憶部21に登録されている目標画像とを比較すると、目標画像の中に写っている物体の形状が正方形であるのに対して、撮影画像の中に写っている被撮影物体の形状は正方形ではない。このとき、誘導方向判定部22は、撮影画像の中に写っている被撮影物体の形状を解析することにより、被撮影物体の傾き角度を認識することができる。即ち、誘導方向判定部22は、この例では、被撮影物体が左側に傾いていること、及びその傾き角度を検出する。そして、誘導方向指示出力部23は、誘導方向判定部22による検出結果を出力する。具体的には、例えば「少し右に傾けて下さい。」というメッセージが出力される。
【0038】
図9に示す例では、被撮影物体の形状が板状であるものとする。また、撮影部11は、図9(a)に示すように、撮影すべき方向に向かって均一な照射光を出力するものとする。さらに、目標撮影状態記憶部21には、目標撮影状態情報として目標明度分布情報が記憶されているものとする。ここで、目標明度分布は、被撮影物体またはそれと同等な物体を目標姿勢にした状態で撮影をすることによって得られた画像の明度分布をいうものとする。この例では、被撮影物体の目標姿勢は、図9(a)において破線で描かれているように、板状の被撮影物体の所定の面に照射光が垂直に当たるような状態であるものとする。そうすると、目標明度分布は、図9(b)において破線で描かれているように、被撮影物体の全体に渡って明度が一定であることを表す情報となる。
【0039】
この例では、図9(a)に示すように、目標姿勢に対して被撮影物体が傾いている。具体的には、撮影部11からA領域までの距離よりも撮影部11からC領域までの距離の方が短くなっている。そして、この状態で被撮影物体が撮影されると、図9(b)に示すように、A領域の明度よりもC領域の明度の方が高くなる。したがって、この撮影により得られた明度分布と目標明度分布とを対比することにより、被撮影物体の姿勢(ここでは、傾き)を検出できる。この後、誘導方向指示出力部23は、図8に示す例と同様に、誘導方向判定部22による検出結果を出力する。具体的には、図9(a)において矢印Dにより表される方向に被撮影物体を回転させる旨の誘導指示が出力される。
【0040】
なお、図9では、説明を簡単にするために、一次元の明度分布に基づいて被撮影物体の傾きを検出しているが、二次元の明度分布に基づいて被撮影物体の傾きを検出するようにしてもよい。
【0041】
図10は、第2の実施形態の撮影装置20の動作を示すフローチャートである。ここで、ステップS11〜S14の処理は、基本的には、図6に示したステップS1〜S4と同じである。ただし、目標撮影状態記憶部21には、被撮影物体の目標姿勢を表す目標姿勢情報が格納されている。そして、ステップS13〜S14において、被撮影物体の姿勢が目標撮影状態の範囲内であるか否かが判定される。
【0042】
被撮影物体の姿勢が目標撮影状態の範囲外であった場合は、ステップS15において、被撮影物体を回転させる方向およびその回転量を算出する。ここで、この回転方向/回転量は、「現在の撮影状態」を「目標撮影状態」に近づけるように算出される。なお、具体例については、図8〜図9を参照しながら説明した通りである。そして、ステップS6において、ユーザに対して、回転方向/回転量を通知するためのメッセージを出力する。これにより、ユーザは、被撮影物体の姿勢を目標姿勢に近づけることができる。この後、ステップS1に戻り、次の画像を撮影する。
【0043】
上記フローチャートの処理は、被撮影物体の姿勢が目標姿勢になるまで繰り返し実行される。そして、被撮影物体の姿勢が目標姿勢になった時点で誘導処理は終了する。
【0044】
なお、上述の第1および第2の実施形態では、被撮影物体の位置または姿勢が検出され、その検出結果に基づいて被撮影物体を誘導するか否かの判定がされているが、他の要因を考慮して誘導処理を行うようにしてもよい。
【0045】
例えば、カメラを用いて物体を撮影し、その撮影画像を解析することにより検出される模様を用いてその物体を識別するシステムを考える。すなわち、識別対象の物体が、撮影画像を解析することにより検出可能な模様を有しているものとする。この場合、図2または図7に示す特徴抽出部17は、撮影部11により得られた画像を解析することにより、被撮影物体が有する模様を検出する。一方、目標撮影状態記憶部13、21には、目標撮影状態情報として、撮影部11により撮影されるべき模様の量の目標値が定義されている。ここで、「模様の量」としては、例えば、その模様が線パターンである場合には、「線の本数」または「各線の長さの総和」などが定義される。
【0046】
誘導方向判定部14または誘導姿勢判定部22は、特徴抽出部17により検出された模様の量と、目標撮影状態情報として定義されている模様の量とを比較する。そして、検出された模様の量の方が少なかった場合には誘導処理を継続し、検出された模様の量の方が多くなった時点で誘導処理を終了するようにしてもよい。
【0047】
図11は、第3の実施形態の撮影装置の構成図である。第3の実施形態の撮影装置30は、撮影部11、撮影画像記憶部12、物体判別部31、物体画像記憶部32、背景画像記憶部33、誘導指示出力部34、撮影画像出力制御部35を備える。なお、撮影部11、撮影画像記憶部12については、第1の実施形態において説明した通りである。
【0048】
物体判別部31は、撮影部11により撮影された画像の中に被撮影物体の画像が含まれているか否かを判定する。そして、撮影部11により撮影された画像の中に被撮影物体の画像が含まれていた場合には、その画像を物体画像として物体画像記憶部32に格納する。一方、被撮影物体の画像が含まれていなかった場合には、その画像を背景画像として背景画像記憶部33に格納する。ただし、被撮影物体の画像が含まれていた場合であっても、不適切な状態で撮影されていた場合には、その画像は廃棄される。なお、物体判別部31は、撮影画像記憶部12に記憶されている画像データを解析してその特徴を抽出する特徴抽出部17を備えている。そして、特徴抽出部17の出力に基づいて、被撮影物体の画像が含まれているか否かを認識できるものとする。
【0049】
誘導指示出力部35は、物体判別部31による判別結果に基づいて、被撮影物体を誘導する指示を作成して出力する。撮影画像出力制御部35は、物体画像記憶部32に記憶されている物体画像と背景画像記憶部32に記憶されている背景画像との差分画像を生成することにより、被撮影物体の画像を切り出す(背景差分処理)。そして、その切り出した被撮影物体の画像を図1に示す識別装置3に送る。なお、識別装置3において背景差分処理が行われる場合には、撮影画像出力制御部35は、物体画像および背景画像の双方を識別装置3に送る。
【0050】
図12および図13は、物体判別部31の動作を説明する図である。図12に示す例では、被撮影物体が撮影部11の撮影視野内に配置されている。したがって、この場合、撮影部11により撮影された画像の中には被撮影物体の画像が含まれている。そして、物体判別部31は、この画像を物体画像として物体画像記憶部32に格納する。この後、物体判別部31は、背景画像記憶部33に背景画像が記憶されているか否かをチェックする。そして、背景画像が記憶されてなければ、誘導指示出力部34は、被撮影物体を撮影部11の撮影視野の外に誘導するための指示を生成する。
【0051】
ユーザは、この誘導指示に従って、図13に示すように、被撮影物体を撮影視野の外に移動させる。そして、その後、撮影部11が撮影を行う。
図13に示す例では、被撮影物体が撮影部11の撮影視野の外に配置されている。したがって、この場合、撮影部11により撮影された画像の中に被撮影物体の画像が含まれていない。そして、物体判別部31は、この画像を背景画像として背景画像記憶部32に格納する。この後、物体判別部31は、物体画像記憶部32に物体画像が記憶されているか否かをチェックする。そして、物体画像が記憶されてなければ、誘導指示出力部34は、被撮影物体を撮影部11の撮影視野内に誘導するための指示を生成する。
【0052】
ユーザは、この誘導指示に従って、図12に示すように、被撮影物体を撮影視野内に移動させる。そして、その後、撮影部11が撮影を行う。
このように、撮影装置30は、物体画像および背景画像の双方を取得するために、必要に応じて、ユーザに対して被撮影物体を誘導する指示を出力する。
【0053】
図14は、物体判別部31による判断手法の一例を説明する図である。なお、被撮影物体は、その全面に特定の色(ここでは、赤色)が付されているものとする。また、物体判別部31は、撮影部11により撮影された画像全体に対する赤色の画像の割合(面積比)を検出する機能を備えているものとする。
【0054】
図14(a)に示す例では、赤色画像が検出されていない。この場合、物体判別部31は、撮影部11により撮影された画像の中に被撮影物体の画像が存在していないものとみなし、その画像を背景画像記憶部33に格納する。
【0055】
図14(b)に示す例では、画像全体に対する赤色画像の割合が8パーセントである。この場合、物体判別部31は、被撮影物体が撮影部11から遠く離れすぎていると判断し、その画像を廃棄する。なお、物体判別部31は、画像全体に対する赤色画像の割合が所定値(例えば、20パーセント)よりも小さかった場合に、被撮影物体が撮影部11から遠く離れすぎていると判断する。
【0056】
図14(c)に示す例では、画像全体に対する赤色画像の割合が30パーセントである。この場合、物体判別部31は、被撮影物体が目標位置に配置されていると判断し、その画像を物体画像記憶部32に格納する。なお、物体判別部31は、画像全体に対する赤色画像の割合が所定範囲内(例えば、20〜40パーセント)に入っていた場合に、被撮影物体が目標位置に配置されているものと判断する。
【0057】
図14(d)に示す例では、画像全体に対する赤色画像の割合が80パーセントである。この場合、物体判別部31は、被撮影物体が撮影部11に近づきすぎていると判断し、その画像を廃棄する。なお、物体判別部31は、画像全体に対する赤色画像の割合が所定値(例えば、40パーセント)よりも大きかった場合に、被撮影物体が撮影部11に近づきすぎていると判断する。
【0058】
図15は、第3の実施形態の撮影装置30の動作を示すフローチャートである。ステップS21では、撮影部11により撮影された画像が撮影画像記憶部12に記憶される。ステップS22では、撮影画像記憶部12に記憶されている画像に対して所定の画像処理(例えば、色成分分析処理など)が抽出される。
【0059】
ステップS23では、画像全体に占める特定の色成分の画像の割合(比率A)を算出する。ステップS24では、比率Aと予め設定されている閾値とを比較する。
【0060】
比率Aが「閾値T3よりも小さい」であれば、撮影された画像の中に被撮影物体の画像が含まれていないものとみなし、ステップS25において、その画像を背景画像記憶部33に格納する。なお、閾値T3は、図14に示す例では、例えば「5パーセント」である。続いて、ステップS26では、物体画像記憶部32に物体画像が格納されているか否かを調べる。そして、物体画像が格納されていない場合は、ステップS27において、被撮影物体を撮影部11の撮影視野内に導くための誘導指示を出力する。一方、物体画像が格納されていた場合は、物体画像および背景画像の双方が取得されていることになるので、処理を終了する。
【0061】
比率Aが「閾値T1よりも大きく、且つ、閾値T2よりも小さい」であれば、撮影された画像の中に被撮影物体の画像が含まれているとみなし、ステップS28において、その画像を物体画像記憶部32に格納する。なお、閾値T1および閾値T2は、図14に示す例では、それぞれ、「20パーセント」および「40パーセント」である。続いて、ステップS29では、背景画像記憶部33に背景画像が格納されているか否かを調べる。そして、背景画像が格納されていない場合は、ステップS30において、被撮影物体を撮影部11の撮影視野の外に誘導するための指示を出力する。一方、背景画像が格納されていた場合は、物体画像および背景画像の双方が取得されていることになるので、処理を終了する。
【0062】
なお、ユーザは、ステップS27またはS30の誘導指示に従って被測定物体を移動させる。そして、その後、ステップS21に戻り、撮影部11が撮影を行う。これにより、物体画像および背景画像の双方が取得される。
【0063】
比率Aが「閾値T3よりも大きく、且つ、閾値T1よりも小さい」或いは「閾値T2よりも大きい」であれば、撮影された画像の中に被撮影物体の画像が含まれてはいるが、被撮影物体が不適切な位置に配置されていると判断される。この場合、ステップS31においてその画像が廃棄される。そして、ステップS32において、被撮影物体を目標位置に誘導するための処理が行われる。すなわち、比率Aが閾値T3よりも大きくかつ閾値T1よりも小さい場合は、被撮影物体を撮影部11に近づけるための誘導指示を出力する。一方、比率Aが閾値T2よりも大きい場合は、被撮影物体を撮影部11から遠ざけるための誘導指示を出力する。そして、その後、ステップS21に戻る。
【0064】
図16は、第4の実施形態の撮影装置の構成図である。第4の実施形態の撮影装置40は、撮影部11、撮影画像記憶部12、距離測定部41、物体判別部42、物体画像記憶部32、背景画像記憶部33、誘導指示出力部34、撮影画像出力制御部35を備える。ここで、撮影部11、撮影画像記憶部12、物体画像記憶部32、背景画像記憶部33、誘導指示出力部34、撮影画像出力制御部35については、第1または第3の実施形態において説明した通りである。
【0065】
距離測定部41は、例えば、公知の距離センサであり、撮影部11と被撮影物体との間の距離を測定する。
物体判別部42は、第3の実施形態の物体判別部31と同様に、撮影部11により撮影された画像の中に被撮影物体の画像が含まれているか否かを判定する。そして、撮影部11により撮影された画像の中に被撮影物体の画像が含まれていた場合には、その画像を物体画像として物体画像記憶部32に格納する。一方、被撮影物体の画像が含まれていなかった場合には、その画像を背景画像として背景画像記憶部33に格納する。ただし、物体判別部42は、距離測定部41の出力の基づいて、撮影された画像の中に被撮影物体の画像が含まれているか否かを判定する。
【0066】
図17は、第4の実施形態の撮影装置40の動作を示すフローチャートである。なお、ステップS21、S25〜S32の処理は、図15を参照しながら説明した通りである。
【0067】
ステップS41では、距離測定部41の出力に基づいて、撮影部11と被撮影物体との間の距離(距離A)を算出する。ステップS42では、距離Aと予め設定されている閾値とを比較する。
【0068】
距離Aが「閾値T3(例えば、16cm)よりも大きい」であれば、撮影された画像の中に被撮影物体の画像が含まれていないものとみなし、ステップS25に進む。また、距離Aが「閾値T1(例えば、4cm)よりも大きく、且つ、閾値T2(例えば、8cm)よりも小さい」であれば、撮影された画像の中に被撮影物体の画像が含まれているとみなし、ステップS28に進む。さらに、距離Aが「閾値T1よりも小さい」あるいは「閾値T2よりも大きく、且つ、閾値T3よりも小さい」であれば、撮影された画像の中に被撮影物体の画像が含まれてはいるが、被撮影物体が不適切な位置に配置されていると判断される。この場合、ステップS31に進む。
【0069】
このように、第4の実施形態の撮影装置40の動作は、基本的に、第3の実施形態の撮影装置30と同じである。ただし、第4の実施形態では、距離センサ等を用いて撮影部11から被撮影物体までの距離を直接的に測定する。このため、上記距離を画像解析のみでは推定できない場合であっても、被撮影物体が写っているか否かを確実に判定することができる。
【0070】
また、第3および第4の実施形態の撮影装置によれば、物体領域と背景領域とを切り分けることができるので、被撮影物体の画像を保持したまま背景画像のみを変更した画像を生成できる。
【0071】
上述した第1〜第4の実施形態では、被撮影物体を適切な位置または姿勢に誘導する機能が提供され、この機能を利用して物体の識別精度の向上が図られている。ところが、仮に背景画像が適切でないとすると、被撮影物体が写っている画像を解析しても、その物体を正確に切り出せないおそれがある。即ち、背景画像が適切でないと、物体の識別精度が低下してしまうおそれがある。このため、物体の識別精度を向上させるためには、予め好適な背景画像を用意しておくことが望ましい。そこで、下記の第5の実施形態の撮影装置は、予め好適な背景画像を取得するための機能を有している。
【0072】
図18は、第5の実施形態の撮影装置の構成図である。第5の実施形態の撮影装置50は、撮影部11、撮影画像記憶部12、目標背景撮影状態記憶部51、背景撮影状態判定部52、撮影装置誘導指示出力部53を備える。なお、撮影部11、撮影画像記憶部12については、第1の実施形態において説明した通りである。
【0073】
目標背景撮影状態記憶部51には、目標背景撮影状態情報として、背景画像として望ましい状態を表す情報が記憶されている。ここで、一般に、背景が明るすぎると、被撮影物体が写っている画像を解析しても、その物体の画像を正確に切り出せないおそれがある。また、背景の明度の分布が均一でない場合も、物体の画像を正確に切り出せないおそれがある。したがって、この場合、目標背景撮影状態情報としては、例えば、背景画像の明度を定義する情報、または、背景画像の明度分布を定義する情報が記憶されるようにしてもよい。或いは、予め用意された適切な背景(目標背景)を撮影することによって得られた画像データであってもよい。
【0074】
背景撮影状態判定部52は、目標背景撮影状態情報を参照し、撮影部11により得られた背景画像(被撮影物体が写っていない画像)が適切であるか否かを判定する。そして、背景画像が適切でないと判断した場合には、撮影部11の位置または姿勢をどのように誘導すべきかを判定する。なお、背景撮影状態判定部52は、撮影画像記憶部12に記憶されている画像データを解析してその特徴を抽出する特徴抽出部17を備え、特徴抽出部17の出力に基づいて背景画像の状態(明度分布など)を認識できるものとする。
【0075】
撮影装置誘導指示出力部53は、背景撮影状態判定部52による判定結果に基づいて、ユーザに対して誘導指示を出力する。これにより、ユーザは、撮影部11を適切な位置に移動させることができる。あるいは、撮影装置誘導指示出力部53は、背景撮影状態判定部52による判定結果に基づいて、撮影部11の位置を移動/回転させるようにしてもよい。
【0076】
次に、図19および図20を参照しながら、第5の実施形態の撮影装置50の動作を説明する。なお、ここでは、撮影部11の撮影視野内に被撮影物体が存在しない状態で撮影が行われ、その画像が撮影画像記憶部12に記憶されているものとする。以下では、この画像を背景画像と呼ぶことにする。
【0077】
図19に示す例では、撮影部11により得られた背景画像の上部領域の明度が高く、下部領域の明度が低い。この場合、背景撮影状態判定部52は、この背景画像の明度分布を分析し、その上部領域の明度が目標背景撮影状態情報として定義されている明度よりも高いことを検出すると、撮影部11を下方へ誘導すべきである(あるいは、撮影部11を下方に向けるべき)と判定する。そして、この判定結果は、誘導指示として撮影装置誘導指示出力部53によりユーザに通知される。
【0078】
図20に示す例では、撮影部11により得られた背景画像の中に蛍光灯の画像が含まれている。この場合、この背景画像において、蛍光灯に対応する領域(この例では、右端領域)の明度が高くなる。そして、背景撮影状態判定部52は、この背景画像の明度分布を分析し、その右端領域の明度が目標背景撮影状態情報として定義されている明度よりも高いことを検出すると、撮影部11を左方へ誘導すべきである(あるいは、撮影部11を左方向に向けるべき)と判定する。そして、この判定結果は、誘導指示として撮影装置誘導指示出力部53によりユーザに通知される。
【0079】
ユーザは、撮影装置誘導指示出力部53からの誘導指示に従って撮影部11を移動または回転させる。これにより、第5の実施形態の撮影装置は、適切な背景画像を得ることが出来る。すなわち、明度の低い背景画像あるいは明度分布の均一な背景画像得られる。したがって、この背景画像が得られる環境下で識別対象の物体を撮影すれば、その識別精度が向上する。
【0080】
図21は、第5の実施形態の撮影装置50の動作を示すフローチャートである。ステップS51では、撮影部11により背景画像が撮影され、撮影画像記憶部12に記憶される。なお、「背景画像」とは、撮影部11の撮影視野内に被撮影物体が存在しない状態で撮影された画像のことをいう。
【0081】
ステップS52では、撮影画像記憶部12に記憶されている背景画像を解析することにより、画像全体の明度および明度分布を算出する。なお、この処理は、特徴抽出部17により実行される。ステップS53およびS54では、目標背景撮影状態記憶部51に記憶されている明度情報を参照し、ステップS52で算出された背景画像の明度または明度分布が許容範囲内であるか否かを判断する。
【0082】
背景画像の明度または明度分布が許容範囲内でなかった場合は、ステップS55において、より明度の低い背景画像が得られるため、或いは明度分布の均一な背景画像が得られるために、撮影部11をどのように誘導すればよいのかを判定する。そして、ステップS56において、その判定結果が誘導指示として出力される。
【0083】
ユーザは、誘導指示に従って撮影部11を移動または回転させる。そして、ステップS51に戻り、次の背景画像を撮影する。なお、ステップS51〜S56の処理は、撮影部11により得られる背景画像の明度または明度分布が許容範囲内に入るまで繰り返し実行される。
【0084】
なお、第1〜第5の実施形態の撮影装置により提供される機能は、それぞれ任意に組み合わせることができる。すなわち、例えば、第5の実施形態が提供する機能により撮影部11の位置または角度を誘導し、その後、第1〜第4の実施形態が提供する機能により被撮影物体の位置または姿勢を誘導しながら撮影を行うようにしてもよい。また、例えば、第1の実施形態が提供する機能により被撮影物体を適切な位置に誘導した後、第2の実施形態が提供する機能により被撮影物体の姿勢を修正しながら撮影を行うようにしてもよい。
【0085】
次に、誘導指示の出力方法について説明する。なお、以下では、第1の実施形態の撮影装置をベースにして説明をするが、これに限定されるものではなく、第2〜第5の実施形態の撮影装置にも適用可能である。
【0086】
図22に示す撮影装置は、文字列生成部61、表示装置62を備える。そして、文字列生成部61は、誘導方向判定部14により決定された誘導指示に対応する文字列を生成する。また、表示装置62は、文字列生成部61により生成された文字列を表示する。この文字列は、被撮影物体または撮影部11の移動方向、移動量、回転方向、回転角度を指示するガイドメッセージである。ここで、生成された文字列を即座に表示することは容易である。したがって、この方法によれば、ユーザは、被撮影物体または撮影部11の位置や姿勢を素早く修正することができ、物体を識別するための処理時間が短くなる。
【0087】
図23に示す撮影装置は、図形/記号生成部63、表示装置62を備える。そして、図形/記号生成部63は、誘導方向判定部14により決定された誘導指示に対応する図形/記号を生成する。また、表示装置62は、図形/記号生成部61により生成された図形/記号を表示する。この図形/記号は、例えば、被撮影物体または撮影部11の移動方向、移動量、回転方向、回転角度を指示する矢印マークである。したがって、この場合、図22に示す方法により表示されるメッセージを読むことができないユーザ(例えば、外国人)であっても、被撮影物体または撮影部11の位置や姿勢を素早く修正することができる。
【0088】
図24に示す撮影装置は、音声ガイダンス生成部64、スピーカ65を備える。そして、音声ガイダンス生成部64は、誘導方向判定部14により決定された誘導指示に対応する音声ガイダンスを生成し、スピーカ65を介して出力する。ここで、この音声ガイダンスは、被撮影物体または撮影部11の移動方向、移動量、回転方向、回転角度を指示するメッセージである。したがって、この方法によれば、視覚が不自由なユーザであっても、被撮影物体または撮影部11の位置や姿勢を修正することができる。
【0089】
図25に示す撮影装置は、立体音響生成部66、及び複数のスピーカ67a、67bを備える。そして、立体音響生成部66は、誘導方向判定部14により決定された誘導指示に対応するガイド音を生成し、スピーカ67a、67bを介して出力する。ここで、このガイド音は、被撮影物体または撮影部11の移動方向、移動量、回転方向、回転角度を指示する。具体的には、誘導指示は、ガイド音の聞こえてくる方向、ガイド音の音量、ガイド音の音程、ガイド音を周期的に出力する場合にはその周期、などにより表現される。例えば、被撮影物体を撮影部11に近づけさせたい場合には、ガイド音として基準音よりも高い音を出力し、被撮影物体を撮影部11から遠ざけたい場合には、ガイド音として基準音よりも低い音を出力する。このとき、このガイド音の高さは、撮影部11から被撮影物体までの距離に応じて連続的に変化するものとする。
【0090】
図26は、ガイド音を利用して被撮影物体を誘導する方法を説明する図である。この例では、現在、被撮影物体がX点に配置されている。そして、誘導方向判定部14によりこの被撮影物体をY地点に誘導すべき旨の判定がされたものとする。また、ユーザは、スピーカ67aから出力される音Aおよびスピーカ67bから出力される音Bの合成音が聞こえるものとする。この場合、スピーカ67a、67bの音量は、ユーザを基準としたときの合成音の定位方向が、ユーザからY地点へ向かう方向となるように調整される。これにより、ユーザには、Y地点の方角からガイド音が聞こえてくるので、X地点にある被撮影物体をY地点に移動させることができる。
【0091】
図27は、本発明に係わる誘導指示機能(誘導方向判定部14、誘導姿勢判定部22、物体判別部31、42など)を提供するコンピュータのブロック図である。なお、本発明に係わる誘導指示機能は、コンピュータを用いて上述のフローチャートの処理を記述したプログラムを実行することにより実現される。
【0092】
CPU101は、上述のフローチャートに示した処理を記述したプログラムを記憶装置102からメモリ103にロードして実行する。記憶装置102は、例えばハードディスクであり、上記プログラムを格納する。なお、記憶装置102は、コンピュータ100に接続される外部記憶装置であってもよい。メモリ103は、例えば半導体メモリであり、CPU101の作業領域として使用される。ここで、目標撮影状態情報および目標背景撮影状態情報は、例えば、記憶装置102に格納されている。また、撮影画像記憶部12、物体画像記憶部32、背景画像記憶部33は、例えば、メモリ103により実現される。
【0093】
記録媒体ドライバ104は、CPU101の指示に従って可搬性記録媒体105にアクセスする。可搬性記録媒体105は、例えば、半導体デバイス(PCカード等)、磁気的作用により情報が入出力される媒体(フレキシブルディスク、磁気テープ等)、光学的作用により情報が入出力される媒体(光ディスク等)を含むものとする。通信制御装置106は、CPU101の指示に従って、ネットワークを介してデータを送受信する。出力装置107は、例えば、表示装置またはスピーカであり、生成された誘導指示を出力する。
【0094】
図28は、本発明に係わるソフトウェアプログラムの提供方法を説明する図である。本発明に係わるプログラムは、例えば、以下の3つの方法のなかの任意の方法で提供される。
【0095】
(1)コンピュータにインストールされて提供される。この場合、プログラムは、例えば、コンピュータ100の出荷前にそのコンピュータ100にプレインストールされる。
【0096】
(2)可搬性記録媒体に格納されて提供される。この場合、可搬性記録媒体105に格納されるプログラムは、基本的に、記録媒体ドライバ104を介して記憶装置102にインストールされる。
【0097】
(3)ネットワーク上に設けられているプログラムサーバから提供される。この場合、コンピュータ100は、プログラムサーバからダウンロードすることにより対応するプログラムを取得する。ただし、コンピュータ100は、サーバ装置において上記プログラムの実行を依頼し、その実行結果を受け取るようにしてもよい。
【0098】
(付記1) 物体を撮影する撮影手段と、
上記物体の目標撮影状態を表す目標撮影状態情報を記憶する目標撮影状態記憶手段と、
上記目標撮影状態情報および上記撮影手段により撮影された画像に基づいて、上記物体をどのように誘導すべきかを判定する誘導判定手段と、
上記誘導判定手段による判定結果に基づいて上記物体をどのように誘導すべきかを指示する誘導指示出力手段と、
上記撮影手段により撮影された画像を出力する画像出力手段、
を有する撮影装置。
【0099】
(付記2)付記1に記載の撮影装置であって、
上記目標撮影状態情報は、上記物体の目標位置を表す情報を含み、
上記誘導判定手段は、上記物体を誘導すべき方向を判定する。
【0100】
(付記3)付記1に記載の撮影装置であって、
上記目標撮影状態情報は、上記物体の目標姿勢を表す情報を含み、
上記誘導判定手段は、上記物体を誘導すべき回転方向を判定する。
【0101】
(付記4)付記1に記載の撮影装置であって、
上記撮影手段により撮影された画像の中に撮影対象の物体の画像が含まれているか否かを判別する物体判別手段と、
上記物体の画像が含まれている場合の画像を物体画像として記憶する物体画像記憶手段と、
上記物体の画像が含まれていない場合の画像を背景画像として記憶する背景画像記憶手段、をさらに有し、
上記画像出力手段は、上記物体画像および背景画像に基づいて上記物体の画像を切り出し、その切り出した画像を出力する。
【0102】
(付記5)付記1に記載の撮影装置であって、
上記撮影手段により撮影された画像の中に撮影対象の物体の画像が含まれているか否かを判別する物体判別手段と、
上記物体の画像が含まれている場合の画像を物体画像として記憶する物体画像記憶手段と、
上記物体の画像が含まれていない場合の画像を背景画像として記憶する背景画像記憶手段、をさらに有し、
上記画像出力手段は、上記物体画像および背景画像の双方を出力する。
【0103】
(付記6)付記4または5に記載の撮影装置であって、
上記誘導判定手段は、上記物体画像記憶手段に上記物体画像が記憶されていない場合には、上記撮影手段によって上記物体を含む画像が撮影されるようにその物体を誘導し、上記背景画像記憶手段に上記背景画像が記憶されていない場合には、上記撮影手段によって上記物体を含まない画像が撮影されるようにその物体を誘導する。
【0104】
(付記7)付記1に記載の撮影装置であって、
上記撮影手段と上記物体との間の距離を測定する測定手段と、
上記測定手段による測定結果に基づいて、上記撮影手段により撮影された画像の中に撮影対象の物体の画像が含まれているか否かを判別する物体判別手段と、
上記物体の画像が含まれている場合の画像を物体画像として記憶する物体画像記憶手段と、
上記物体の画像が含まれていない場合の画像を背景画像として記憶する背景画像記憶手段、をさらに有し、
上記画像出力手段は、上記物体画像および背景画像に基づいて上記物体の画像を切り出し、その切り出した画像を出力する。
【0105】
(付記8)付記1に記載の撮影装置であって、
上記撮影手段と上記物体との間の距離を測定する測定手段と、
上記測定手段による測定結果に基づいて、上記撮影手段により撮影された画像の中に撮影対象の物体の画像が含まれているか否かを判別する物体判別手段と、
上記物体の画像が含まれている場合の画像を物体画像として記憶する物体画像記憶手段と、
上記物体の画像が含まれていない場合の画像を背景画像として記憶する背景画像記憶手段、をさらに有し、
上記画像出力手段は、上記物体画像および背景画像の双方を出力する。
【0106】
(付記9)付記7または8に記載の撮影装置であって、
上記誘導判定手段は、上記物体画像記憶手段に上記物体画像が記憶されていない場合には、上記撮影手段によって上記物体を含む画像が撮影されるようにその物体を誘導し、上記背景画像記憶手段に上記背景画像が記憶されていない場合には、上記撮影手段によって上記物体を含まない画像が撮影されるようにその物体を誘導する。
【0107】
(付記10)付記1に記載の撮影装置であって、
上記画像出力手段は、上記誘導判定手段が上記物体を誘導する必要がないと判定したときに、上記撮影手段により撮影された画像を出力する。
【0108】
(付記11)付記1に記載の撮影装置であって、
上記物体が所定の模様を有しており、
上記目標撮影状態情報として、上記撮影手段により撮影されるべき模様の量が定義されており、
上記誘導判定手段は、上記撮影手段により撮影された上記物体の画像から検出された上記模様の量が、上記目標撮影状態情報として定義されている模様の量よりも多かったときに、上記物体を誘導する必要がない旨の判定をする。
【0109】
(付記12)特定色の物体を撮影する撮影手段と、
上記撮影手段により撮影された画像全体に対する上記特定色の画像の割合を検出する検出手段と、
上記検出手段による検出結果に基づいて、上記物体を誘導すべき方向を指示する誘導指示出力手段と、
上記撮影手段により撮影された画像を出力する画像出力手段、
を有する撮影装置。
【0110】
(付記13)物体を撮影する撮影手段と、
上記撮影手段と上記物体との間の距離を測定する測定手段と、
上記測定手段による測定結果に基づいて、上記物体を誘導すべき方向を指示する誘導指示出力手段と、
上記撮影手段により撮影された画像を出力する画像出力手段、
を有する撮影装置。
【0111】
(付記14)撮影手段と、
上記撮影手段を用いて背景画像を撮影した場合の目標撮影状態を表す目標撮影状態情報を記憶する目標撮影状態記憶手段と、
上記目標撮影状態情報および上記撮影手段により撮影された画像に基づいて、上記撮影手段を誘導すべき方向または角度を判定する誘導判定手段と、
上記誘導判定手段による判定結果に基づいて上記撮影手段を誘導すべき方向または角度を指示する誘導指示出力手段と、
を有する撮影装置。
【0112】
(付記15)付記14に記載の撮影装置であって、
上記誘導指示出力手段から出力される指示に従って上記撮影手段を移動させる移動手段、
をさらに有する。
【0113】
(付記16)付記1〜11、14、15のいずれか1つに記載の撮影装置であって、
上記誘導指示出力手段は、表示手段を含み、上記誘導判定手段による判定結果に対応する文字列をその表示手段に表示する。
【0114】
(付記17)付記1〜11、14、15のいずれか1つに記載の撮影装置であって、
上記誘導指示出力手段は、表示手段を含み、上記誘導判定手段による判定結果に対応する図形または記号をその表示手段に表示する。
【0115】
(付記18)付記1〜11、14、15のいずれか1つに記載の撮影装置であって、
上記誘導指示出力手段は、上記誘導判定手段による判定結果に対応する音声ガイダンスを出力する。
【0116】
(付記19)付記1〜11、14、15のいずれか1つに記載の撮影装置であって、
上記誘導指示出力手段は、上記誘導判定手段による判定結果に対応する立体音響を生成する。
【0117】
(付記20)撮影装置を用いて撮影される物体を誘導する方法であって、
撮影装置を用いて物体を撮影し、
予め用意されている上記物体の目標撮影状態を表す目標撮影状態情報および上記撮影装置により撮影された画像に基づいて、上記物体をどのように誘導すべきかを判定し、
上記判定結果に基づいて上記物体をどのように誘導すべきかの誘導指示を出力する、
物体誘導方法。
【0118】
(付記21)撮影装置を用いて物体を撮影する方法であって、
撮影装置を用いて物体を撮影する第1の工程と、
予め用意されている上記物体の目標撮影状態を表す目標撮影状態情報および上記撮影装置により撮影された画像に基づいて、上記物体をどのように誘導すべきかを判定する第2の工程と、
上記判定結果に基づいて上記物体をどのように誘導すべきかの誘導指示を出力する第3の工程と、
上記物体を誘導すべき必要がないと判定されるまで上記第1〜第3の工程を繰り返す第4の工程、
を有する撮影方法。
【0119】
【発明の効果】
本発明によれば、被撮影物体を適切な位置および姿勢に誘導することができるので、その物体を識別するための良好な画像が得られる。したがって、物体を識別する精度が向上する。
【0120】
また、適切な背景画像が得られるように撮影装置の位置または角度を誘導するので、被撮影物体の画像を正確に抽出することができ、このことによっても物体を識別する精度が向上する。
【図面の簡単な説明】
【図1】本発明に係わる撮影装置が使用されるシステムの一例の構成図である。
【図2】第1の実施形態の撮影装置の構成図である。
【図3】第1の実施形態の撮影装置の動作を説明する図(その1)である。
【図4】第1の実施形態の撮影装置の動作を説明する図(その2)である。
【図5】第1の実施形態の撮影装置の動作を説明する図(その3)である。
【図6】第1の実施形態の撮影装置の動作を示すフローチャートである。
【図7】第2の実施形態の撮影装置の構成図である。
【図8】第2の実施形態の撮影装置の動作を説明する図(その1)である。
【図9】第2の実施形態の撮影装置の動作を説明する図(その2)である。
【図10】第2の実施形態の撮影装置の動作を示すフローチャートである。
【図11】第3の実施形態の撮影装置の構成図である。
【図12】物体判別部の動作を説明する図(その1)である。
【図13】物体判別部の動作を説明する図(その2)である。
【図14】物体判別部による判断手法の一例を説明する図である。
【図15】第3の実施形態の撮影装置の動作を示すフローチャートである。
【図16】第4の実施形態の撮影装置の構成図である。
【図17】第4の実施形態の撮影装置の動作を示すフローチャートである。
【図18】第5の実施形態の撮影装置の構成図である。
【図19】第5の実施形態の撮影装置の動作を説明する図(その1)である。
【図20】第5の実施形態の撮影装置の動作を説明する図(その2)である。
【図21】第5の実施形態の撮影装置の動作を示すフローチャートである。
【図22】誘導指示を出力する方法を説明する図(その1)である。
【図23】誘導指示を出力する方法を説明する図(その2)である。
【図24】誘導指示を出力する方法を説明する図(その3)である。
【図25】誘導指示を出力する方法を説明する図(その4)である。
【図26】図25に示す方法の具体例を示す図である。
【図27】本発明に係わる誘導指示機能を提供するコンピュータのブロック図である。
【図28】本発明に係わるソフトウェアプログラムの提供方法を説明する図である。
【符号の説明】
10、20、30、40、50 撮影装置
11 撮影部
12 撮影画像記憶部
13、21 目標撮影状態記憶部
14 誘導方向判定部
15 誘導方向指示出力部
16、35 撮影画像出力制御部
22 誘導姿勢判定部
23 誘導姿勢指示出力部
31、42 物体判別部
32 物体画像記憶部
33 背景画像記憶部
34 誘導指示出力部
41 距離測定部
51 目標背景撮影状態記憶部
52 背景撮影状態判定部
53 撮影装置誘導指示出力部
Claims (3)
- 撮影手段と、
上記撮影手段を用いて背景画像を撮影した場合の目標撮影状態を表す目標撮影状態情報を記憶する目標撮影状態記憶手段と、
上記目標撮影状態情報および上記撮影手段により撮影された画像に基づいて、上記撮影手段を誘導すべき方向または角度を判定する誘導判定手段と、
上記誘導判定手段による判定結果に基づいて上記撮影手段を誘導すべき方向または角度を指示する誘導指示出力手段と、
を有する撮影装置。 - 請求項1に記載の撮影装置であって、
上記誘導指示出力手段は、表示手段を含み、上記誘導判定手段による判定結果に対応する文字列をその表示手段に表示する。 - 請求項1に記載の撮影装置であって、
上記誘導指示出力手段は、上記誘導判定手段による判定結果に対応する立体音響を生成する。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003083928A JP3860552B2 (ja) | 2003-03-25 | 2003-03-25 | 撮影装置 |
| US10/784,776 US8395673B2 (en) | 2003-03-25 | 2004-02-24 | Shooting device and method with function for guiding an object to be shot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003083928A JP3860552B2 (ja) | 2003-03-25 | 2003-03-25 | 撮影装置 |
Related Child Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006102346A Division JP4481951B2 (ja) | 2006-04-03 | 2006-04-03 | 撮影装置 |
| JP2006102345A Division JP4286844B2 (ja) | 2006-04-03 | 2006-04-03 | 撮影装置 |
| JP2006207309A Division JP2007020197A (ja) | 2006-07-31 | 2006-07-31 | 撮影装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004297223A JP2004297223A (ja) | 2004-10-21 |
| JP3860552B2 true JP3860552B2 (ja) | 2006-12-20 |
Family
ID=32985064
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003083928A Expired - Fee Related JP3860552B2 (ja) | 2003-03-25 | 2003-03-25 | 撮影装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8395673B2 (ja) |
| JP (1) | JP3860552B2 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4515850B2 (ja) | 2004-07-30 | 2010-08-04 | 富士通株式会社 | 生体認証装置の誘導画面制御方法、生体認証装置及びそのプログラム |
| CN101460972A (zh) * | 2006-06-08 | 2009-06-17 | 富士通株式会社 | 引导装置及方法 |
| US7991285B2 (en) | 2008-01-08 | 2011-08-02 | Sony Ericsson Mobile Communications Ab | Using a captured background image for taking a photograph |
| KR101030652B1 (ko) * | 2008-12-16 | 2011-04-20 | 아이리텍 잉크 | 홍채인식을 위한 고품질 아이이미지의 획득장치 및 방법 |
| KR20100091286A (ko) * | 2009-02-10 | 2010-08-19 | 삼성전자주식회사 | 실물 화상 기능을 제공하는 방법 및 휴대 단말기와, 휴대 단말기 거치대 |
| US8803992B2 (en) * | 2010-05-12 | 2014-08-12 | Fuji Xerox Co., Ltd. | Augmented reality navigation for repeat photography and difference extraction |
| JP5800600B2 (ja) * | 2011-06-24 | 2015-10-28 | オリンパス株式会社 | 撮像装置、撮像方法およびプログラム |
| JP2013115444A (ja) * | 2011-11-24 | 2013-06-10 | Sanyo Electric Co Ltd | 電子カメラ |
| US8687104B2 (en) * | 2012-03-27 | 2014-04-01 | Amazon Technologies, Inc. | User-guided object identification |
| US9552598B2 (en) | 2012-10-12 | 2017-01-24 | Ebay Inc. | Mobile trigger web workflow |
| US9374517B2 (en) | 2012-10-12 | 2016-06-21 | Ebay Inc. | Guided photography and video on a mobile device |
| US9554049B2 (en) * | 2012-12-04 | 2017-01-24 | Ebay Inc. | Guided video capture for item listings |
| JP6160148B2 (ja) | 2013-03-19 | 2017-07-12 | 富士通株式会社 | 生体情報入力装置、生体情報入力プログラム、生体情報入力方法 |
| KR20140121694A (ko) * | 2013-04-08 | 2014-10-16 | 삼성전자주식회사 | 촬영 장치 및 촬영 제어 방법 |
| WO2015187866A1 (en) * | 2014-06-03 | 2015-12-10 | Jones Freddy | In-time registration of temporally separated image acquisition |
| JP6274097B2 (ja) * | 2014-12-17 | 2018-02-07 | カシオ計算機株式会社 | 商品識別装置および商品認識ナビゲーション方法 |
| JP6836306B2 (ja) * | 2017-02-01 | 2021-02-24 | キヤノン株式会社 | 撮像制御装置、その制御方法、プログラム及び記録媒体 |
| US20190021652A1 (en) * | 2017-07-19 | 2019-01-24 | International Business Machines Corporation | Monitoring the posture of a user |
| CN108429782B (zh) * | 2017-09-12 | 2020-11-06 | 腾讯科技(深圳)有限公司 | 信息推送方法、装置、终端及服务器 |
| JP6547856B2 (ja) * | 2018-01-09 | 2019-07-24 | カシオ計算機株式会社 | 情報表示装置、誘導表示方法およびプログラム |
| US11159719B2 (en) * | 2018-01-25 | 2021-10-26 | Sony Semiconductor Solutions Corporation | Image processing apparatus and output information control method |
| US10574881B2 (en) * | 2018-02-15 | 2020-02-25 | Adobe Inc. | Smart guide to capture digital images that align with a target image model |
| KR102620877B1 (ko) * | 2019-01-09 | 2024-01-05 | 삼성전자주식회사 | 이미지의 촬영 장소를 추천하는 전자 장치 및 방법 |
| JP6668519B1 (ja) * | 2019-02-04 | 2020-03-18 | ソフトバンク株式会社 | リモコン機能設定プログラム、リモコンサーバ、リモコン機能設定方法、携帯端末 |
| JP7355531B2 (ja) * | 2019-06-24 | 2023-10-03 | ニデックプレシジョン株式会社 | 撮像装置及び撮像誘導方法 |
| CN113132618B (zh) * | 2019-12-31 | 2022-09-09 | 华为技术有限公司 | 辅助拍照方法、装置、终端设备及存储介质 |
| US11949979B2 (en) * | 2020-05-28 | 2024-04-02 | Beijing Xiaomi Mobile Software Co., Ltd. Nanjing Branch | Image acquisition method with augmented reality anchor, device, apparatus and storage medium |
| US11496674B2 (en) * | 2020-09-18 | 2022-11-08 | Microsoft Technology Licensing, Llc | Camera placement guidance |
| CN113038015B (zh) * | 2021-03-19 | 2023-03-24 | 城云科技(中国)有限公司 | 二次拍摄方法和系统 |
| US20240284041A1 (en) * | 2021-08-17 | 2024-08-22 | Sony Group Corporation | Information processing apparatus and information processing method |
| JP2024110708A (ja) * | 2023-02-03 | 2024-08-16 | キヤノン株式会社 | 電子機器、電子機器の制御方法、プログラム、および記憶媒体 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6015780A (ja) | 1983-07-08 | 1985-01-26 | Hitachi Ltd | ロボット制御装置 |
| JPS6455674A (en) | 1987-08-26 | 1989-03-02 | Matsushita Electric Works Ltd | Guide system |
| JPH05268599A (ja) | 1992-03-17 | 1993-10-15 | Fujitsu Ltd | テレビ会議システムにおける人物撮像カメラの自動制御方式 |
| JPH06268902A (ja) | 1993-03-12 | 1994-09-22 | Matsushita Electric Ind Co Ltd | 画像認識装置 |
| US5742141A (en) * | 1996-06-04 | 1998-04-21 | Ford Motor Company | Semi-autonomous parking control system for a vehicle providing tactile feedback to a vehicle operator |
| JP3587635B2 (ja) * | 1996-11-15 | 2004-11-10 | 沖電気工業株式会社 | アイリスを用いた個人認識装置およびこの個人認識装置を用いた自動取引システム |
| EP0908846A3 (en) | 1997-10-07 | 2000-03-29 | Canon Kabushiki Kaisha | Moving object detection apparatus and method |
| JPH11196320A (ja) | 1997-12-26 | 1999-07-21 | Canon Inc | 動画像処理装置、動画像処理方法及びコンピュータ読み取り可能な記憶媒体 |
| US6906744B1 (en) * | 1999-09-28 | 2005-06-14 | Nikon Corporation | Electronic camera |
| JP2001174881A (ja) | 1999-12-16 | 2001-06-29 | Casio Comput Co Ltd | 撮影装置、及び記憶媒体 |
| JP2001229485A (ja) * | 2000-02-14 | 2001-08-24 | Biichi Rock:Kk | 視覚障害者誘導のための音響式交通信号機付加装置配置方法 |
| JP4521086B2 (ja) * | 2000-03-13 | 2010-08-11 | 株式会社東芝 | 顔画像認識装置及び顔画像認識方法 |
| JP3825222B2 (ja) | 2000-03-24 | 2006-09-27 | 松下電器産業株式会社 | 本人認証装置および本人認証システムならびに電子決済システム |
| JP2001314648A (ja) * | 2000-05-10 | 2001-11-13 | Namco Ltd | ゲーム装置および情報記憶媒体 |
| EP1167120B1 (en) * | 2000-06-30 | 2014-08-27 | Panasonic Corporation | Rendering device for parking aid |
| JP2002036991A (ja) * | 2000-07-27 | 2002-02-06 | Honda Motor Co Ltd | 駐車支援装置 |
| JP3647030B2 (ja) | 2000-08-31 | 2005-05-11 | 株式会社日立国際電気 | 物体検出方法及び物体検出装置及び物体検出プログラム |
| US6281806B1 (en) * | 2000-10-12 | 2001-08-28 | Ford Global Technologies, Inc. | Driver road hazard warning and illumination system |
| US7271839B2 (en) * | 2001-03-15 | 2007-09-18 | Lg Electronics Inc. | Display device of focal angle and focal distance in iris recognition system |
| JP2002330318A (ja) | 2001-04-27 | 2002-11-15 | Matsushita Electric Ind Co Ltd | 携帯端末装置 |
| JP3700614B2 (ja) * | 2001-06-22 | 2005-09-28 | 株式会社豊田自動織機 | 駐車支援装置 |
| TWI278782B (en) * | 2001-08-24 | 2007-04-11 | Toshiba Corp | Personal recognition apparatus |
| JP4033672B2 (ja) * | 2001-12-26 | 2008-01-16 | 株式会社日立製作所 | 緊急事態通報システム |
-
2003
- 2003-03-25 JP JP2003083928A patent/JP3860552B2/ja not_active Expired - Fee Related
-
2004
- 2004-02-24 US US10/784,776 patent/US8395673B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20040189829A1 (en) | 2004-09-30 |
| US8395673B2 (en) | 2013-03-12 |
| JP2004297223A (ja) | 2004-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3860552B2 (ja) | 撮影装置 | |
| EP2052347B1 (en) | Real-time face tracking in a digital image acquisition device | |
| US8068639B2 (en) | Image pickup apparatus, control method therefor, and computer program for detecting image blur according to movement speed and change in size of face area | |
| JP6614335B2 (ja) | 画像表示システム、端末、方法およびプログラム | |
| JP6494418B2 (ja) | 画像解析装置、画像解析方法、およびプログラム | |
| KR102186597B1 (ko) | 타겟 크기 측정 시스템 및 그 방법 | |
| KR20120010875A (ko) | 증강 현실 객체 인식 가이드 제공 장치 및 방법 | |
| KR20140061033A (ko) | 문서 영상 인식 방법, 장치 및 이를 이용한 사진 촬영 방법 | |
| JP2006146323A (ja) | 顔特徴照合装置、顔特徴照合方法、及びプログラム | |
| WO2011118066A1 (ja) | 撮影装置及びその制御方法 | |
| US8154771B2 (en) | Training a user on an accessiblity device | |
| US20210093227A1 (en) | Image processing system and control method thereof | |
| JP2007241402A (ja) | 顔認証におけるなりすまし判定装置およびそれを用いた顔認証装置 | |
| KR20110029002A (ko) | 얼굴 판단 장치 및 방법 | |
| US11508174B2 (en) | Image processing method and image processing device | |
| JP4286844B2 (ja) | 撮影装置 | |
| JP4481951B2 (ja) | 撮影装置 | |
| CN115457454A (zh) | 目标检测方法、设备以及存储介质 | |
| US11727538B2 (en) | Apparatus and method for determining sharpness | |
| JPWO2015141185A1 (ja) | 撮像制御装置、撮像制御方法およびプログラム | |
| JP2007020197A (ja) | 撮影装置 | |
| WO2017208699A1 (ja) | 情報処理装置と情報処理方法とプログラムおよび撮像システム | |
| US20220076399A1 (en) | Photographing guide device | |
| US12380593B2 (en) | Automatic image cropping using a reference feature | |
| JP2006109005A (ja) | 画像出力装置および撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20041104 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7426 Effective date: 20041104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20050407 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20050407 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20050331 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060403 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20060620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060731 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20060904 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060919 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060921 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3860552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090929 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100929 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100929 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110929 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120929 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120929 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130929 Year of fee payment: 7 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |