JP3832526B2 - 車両の走行制御装置 - Google Patents
車両の走行制御装置 Download PDFInfo
- Publication number
- JP3832526B2 JP3832526B2 JP16479897A JP16479897A JP3832526B2 JP 3832526 B2 JP3832526 B2 JP 3832526B2 JP 16479897 A JP16479897 A JP 16479897A JP 16479897 A JP16479897 A JP 16479897A JP 3832526 B2 JP3832526 B2 JP 3832526B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- deceleration
- preceding vehicle
- time
- predetermined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000001514 detection method Methods 0.000 claims description 2
- 238000000034 method Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0008—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including means for detecting potential obstacles in vehicle path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Regulating Braking Force (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Description
【発明の属する技術分野】
本発明は、車両の走行制御装置に係り、詳しくは走行制御中の減速制御技術に関する。
【0002】
【関連する背景技術】
近年、自動車の運転操作を軽減するために、先行車の追尾走行を行うべく車間距離制御装置を備えた走行制御装置が開発され実用化されている。
この車間距離制御装置を備えた走行制御装置は、例えば、カメラ、レーザレーダ等の前方認識装置からの情報に基づいて自車両と先行車との間の車間距離を検出し、この車間距離が予め設定された目標車間距離となるようエンジン出力等の調整により車速を調節して先行車両を追尾するようなものである。
【0003】
さらに、最近では、先行車両が減速した場合に、ブレーキ装置を自動的に作動させ、これにより自車両を減速させることの可能な装置が特開平7−65297号公報等に開示されている。
【0004】
【発明が解決しようとする課題】
ところで、上記公報に開示された装置では、先行車両が大きく減速したような場合においても、ブレーキ装置により自車両が自動的に制動されるようにされている。
しかしながら、先行車両が減速したような場合に、その減速に応じて自車両を完全に自動制動させることは、ドライバの意思に応じた制動状態とならない場合もあり、ドライバや車両の乗員に違和感を与える虞があり好ましいことではない。
【0005】
そこで、主として減速度合が大きいような場合には、追尾走行制御中であってもブレーキペダル操作、即ちドライバの意思による通常の制動を行うことが考えられている。
ところが、先行車両の減速に対するドライバの応答、つまりドライバがブレーキペダルを操作開始するまでに時間を要することを考慮すると、ドライバによるブレーキペダルの操作は遅れがちとなるため、ブレーキペダル操作にはある程度の余裕時間を確保することが必要となる。
【0006】
本発明は、上述した事情に基づきなされたもので、その目的とするところは、走行制御中の減速時においてドライバの意思に応じた制動を実現でき且つ安全性の高い車両の走行制御装置を提供することにある。
【0007】
【課題を解決するための手段】
上述した目的を達成するために、請求項1の発明では、自車両と同一の走行車線を走行している先行車両の追尾走行制御を行う車両の走行制御装置において、減速制御が行われるときには、先ず、先行車減速度検出手段により先行車両の減速度が検出され、目標減速度演算手段により先行車両の減速度に応じて自車両の目標減速度が演算される。そして、先行車両が減速しているとき、制動制御手段により、目標減速度が所定減速度未満のときには目標減速度に応じた制動力を付加すべくアクチュエータが作動制御され、一方、目標減速度が所定減速度以上のときには該所定減速度に応じた制動力を付加すべくアクチュエータが作動制御される。
この際、所定減速度は、自車両と先行車両間の車間時間がブレーキペダルの操作開始までに最低限必要とされる所定の余裕時間より短いときには、該所定減速度に応じた制動力を発生するようアクチュエータを作動させて自車両を減速させたと仮定した場合にブレーキペダルの操作開始までの余裕時間(余裕空走時間)が少なくとも所定の余裕時間以上確保される減速度に設定される。
【0008】
このように、目標減速度が所定減速度以上のときにおいて減速度が所定減速度にクリップされると、アクチュエータにより自動的に付加される制動力が制限され、当該自動制動はブレーキペダルを操作するまでの補助制動手段としてのみ機能することになり、先行車両が急な制動をしたような場合でも、自車両が自動的に急制動してしまうことがなくなり、ドライバが違和感を感じることが防止される。
【0009】
また、アクチュエータによる自動制動を補助制動手段として機能させることは、ドライバがブレーキペダルを操作するまでの余裕時間(余裕空走時間)を拡大することになり、故にドライバのブレーキペダル操作の遅れが回避され、減速制御時の車両の走行安全性が向上する。
【0010】
そして、先行車両の減速度が大きく、自車両の目標減速度が大きいような場合であって、自車両と先行車両間の車間時間がドライバによるブレーキペダルの操作開始までに最低限必要とされる所定の余裕時間より短いときでも、ブレーキペダルを操作するまでの余裕時間が最低限必要且つ十分な所定の余裕時間以上とされ、余裕時間の不足なくドライバのブレーキペダル操作の遅れが良好に回避される。
【0011】
【発明の実施の形態】
図1を参照すると、車両1に搭載された本発明に係る走行制御装置の概略構成図が示されている。以下、同図に基づき走行制御装置の構成を説明する。
車両1の前部には、前方に向けてレーザビームを発射し、このレーザビームをスキャニングすることで車両1の前方に位置する物体を認識し、さらに該物体までの距離を計測可能なスキャン式レーザレーダ2が設けられている。また、車室内のルーフ部には、車両1の前方を撮像するCCDカメラ4が取り付けられている。このCCDカメラ4は前方に位置する物体及び車線(白線)等を認識可能とされている。
【0012】
エンジン6には、エンジン6への吸気量を制御しエンジン出力を調節するスロットルバルブ8が連結されている。詳しくは、このスロットルバルブ8には、アクセルペダル(図示せず)の開度等に応じ、後述の電子制御ユニット(ECU)50から出力される作動信号に基づき自動的にバルブ開度を調節可能なスロットルアクチュエータ12が設けられている。
【0013】
左右一対の前輪(駆動輪)20,20及び左右一対の後輪(従輪)22,22には油圧ディスクブレーキ等のサービスブレーキ(制動装置)24がそれぞれ設けられており、このサービスブレーキ24は、負圧ブースタを有したブレーキマスタシリンダ26を介してブレーキペダル28に接続されている。また、ブレーキマスタシリンダ26には、ブレーキペダル28からの入力に拘わらず、ECU50からの作動信号に応じて自動的にサービスブレーキ24を作動可能な負圧式のブレーキアクチュエータ30が設けられている。
【0014】
また、従輪である上記後輪22,22近傍には、右車輪速VSR、左車輪速VSLを検出する車輪速センサ32がそれぞれの車輪に対応して設けられている。これら車輪速センサ32,32は、車速Vを検出するための車速検出手段として機能する。
車両1の車室内に設けられたステアリングホイール34のステアリングコラム36には、車両1の走行制御装置を通常の走行状態と追尾走行制御による走行状態とに切換える追尾走行切換操作スイッチ38が設けられている。追尾走行切換操作スイッチ38をセット側に操作すると追尾走行制御、即ち車間距離制御が開始され、一方リセット側に操作するとその車間距離制御が解除されることになる。
【0015】
ECU50は、車両1の各種制御を司る主制御装置である。同図に示すように、ECU50の入力側には、上記スキャン式レーザレーダ2、CCDカメラ4、車輪速センサ32,32、追尾走行切換操作スイッチ38等の各種センサ、スイッチ類が接続され、一方、出力側には、スロットルアクチュエータ12、ブレーキアクチュエータ30等の各種駆動装置類が接続されている。
【0016】
以下、このように構成された走行制御装置の制御内容について説明する。図2を参照すると、追尾走行制御ルーチンのフローチャートが示されており、以下図2を参照して、本発明に係る追尾走行制御の制御手順を説明する。
追尾走行切換操作スイッチ38がセット側に操作され、追尾走行制御が開始されると、先ず、ステップS10において、自車、即ち車両1の車速Vaを上記車輪速センサ32,32からの情報に基づき算出する。詳しくは、車速Vaは、例えば次式(1)より算出される。
【0017】
Va=(VSR+VSL)/2 …(1)
そして、スキャン式レーザレーダ2とCCDカメラ4からの情報に基づいて先行車両が認識され、ステップS12において、スキャン式レーザレーダ2によって自車から先行車までの距離、即ち車間距離Lが精度よく検出される。
そして、ステップS14において、上記車間距離情報Lに基づき、自車と先行車との相対速度が演算される。詳しくは、相対速度は、当該ルーチンを前回実行したときの車間距離情報Lの前回値と今回値との変化量ΔLに基づいて演算される。変化量ΔLが正であれば自車は先行車から離れつつあるとみなせ、変化量ΔLが負であれば自車は先行車に接近しているとみなすことができる。
【0018】
ステップS16では、上記自車の車速Vaと相対速度とから先行車速Vfが演算される。そして、次のステップS18では、上記先行車速Vfを微分処理して先行車減速度αfを演算する(先行車減速度検出手段)。詳しくは、先行車減速度αfは、当該ルーチンを前回実行したときの先行車速情報Vfの前回値と今回値との変化量ΔVfから演算される。
【0019】
次のステップS20では、自車を減速すべきか否かの判別を行う。つまり、ここでは、上記変化量ΔLが負となって自車が先行車に接近しており、車両1を減速させる必要があるか否かを判別する。
ステップS20の判別結果が偽(No)で、上記変化量ΔLが正であり、自車を減速させる必要がないと判定される場合には、次にステップS28に進み、車間距離Lが後述の目標車間距離Lsとなるようスロットルアクチュエータ12、つまりスロットルバルブ8を開閉操作し、加速制御を行う。
【0020】
一方、ステップS20の判別結果が真(Yes)で、自車を減速すべき状況にあると判定される場合には、次にステップS22に進む。
ステップS22では、補助制動力の演算を行う。つまり、自車を減速すべき状況にあるときには、上記ブレーキアクチュエータ30を自動的に作動させ、サービスブレーキ24による制動補助を行うようにするのであるが、ここでは、この際付加される制動力を算出する。この補助制動力の演算は図3の補助制動力演算サブルーチンが実行される。以下、補助制動力演算の処理手順について説明する。
【0021】
図3のステップS30では、自車の目標減速度αaを演算する(目標減速度演算手段)。目標減速度αaは、状況に応じて次式(2),(3)から算出される。
先行車が減速している場合:
αa=Va2/{2・(L−Ls)+(Vf2/αf)} …(2)
先行車が定速走行或いは停止している場合:
αa=(Va−Vf)2/{2・(L−Ls)} …(3)
ここに、Vaは自車速、Vfは先行車速、Lは車間距離、αfは先行車減速度である。また、Lsは目標車間距離であり、車速Vに応じて予め設定された値である。詳しくは、車速Vに応じて先行車と自車との目標車間時間が予め交通流調査等により得られたデータに基づき所定値t1(例えば、1.5sec)に設定されており、目標車間距離Lsはこの目標車間時間t1に基づいて設定されている。
【0022】
以上のように、目標減速度αaが演算されたら、次にステップS32に進む。ステップS32では、目標減速度αaが所定値X1(所定減速度であって、例えば、0.24G)以上であるか否かを判別する。この所定値X1(例えば、0.24G)は、上記目標車間時間t1(例えば、1.5sec)等に応じて予め設定された値であるが、これについては後述する。
【0023】
ステップS32の判別結果が偽(No)で、目標減速度αaが所定値X1(例えば、0.24G)より小さい場合には、次にステップS36に進み、目標減速度αaに応じて制動力、即ち補助制動力を算出する。
そして、図2中のステップS24において、スロットルアクチュエータ12に上記補助制動力に応じた信号を供給してスロットルバルブ8を閉作動させ、ステップS26において、ブレーキアクチュエータ30に上記補助制動力に応じた信号を供給する(制動制御手段)。これにより、ブレーキアクチュエータ30が補助制動力に応じた量だけ自動的に駆動することになり、サービスブレーキ24による制動補助が良好且つ適正に実施されることになる。この場合には、ドライバがブレーキペダル28を操作しなくても、車両1は良好に先行車に追尾して走行する。
【0024】
一方、ステップS32の判別結果が真(Yes)で、目標減速度αaが所定値X1以上である場合には、次にステップS34に進み、目標減速度αaを所定値X1(例えば、0.24G)に設定(クリップ)する。そして、ステップS36において、該所定値X1(例えば、0.24G)に基づき補助制動力を算出し、この所定値X1(例えば、0.24G)に応じた補助制動力に基づいてブレーキアクチュエータ30を自動的に駆動する(制動制御手段)。この場合、車両1を先行車に良好に追尾させるためには、さらにドライバがブレーキペダル28を操作することになる。
【0025】
以上のようにして追尾走行制御の制御が実施されることになるが、以下、目標減速度αaが所定値X1(例えば、0.24G)以上である場合に目標減速度αaを所定値X1(例えば、0.24G)でクリップする理由について詳細に説明する。
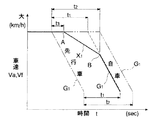
図4を参照すると、自車が目標車間時間t1(例えば、1.5sec)で追尾走行制御されているときに、先行車が減速度G1(例えば、0.7G)で減速した場合の先行車の車速Vfと自車の車速Vaの時間変化がそれぞれ示されており、以下、当該図4に基づいて説明する。
【0026】
本来、先行車が減速度G1(例えば、0.7G)のような大きな減速度で急制動したときには(一点鎖線で示す)、自車を先行車と接触させないよう減速させるためには、先行車が制動を開始した後目標車間時間t1(例えば、1.5sec)以内に、先行車に合わせて目標減速度αaを同一の減速度G1として自車の制動を行うようにすればよい(破線で示す)。従って、この場合、減速度G1に応じた補助制動力でもって車両1を自動的に制動させるようにすればよい。
【0027】
しかしながら、急激な制動を全て自動的に実施することは、必ずしもドライバの意思に沿ったものとはならず、ドライバ等の車両1の乗員に違和感を与えることになり好ましいことではない。故に、可能な限りドライバがブレーキペダル28を操作して制動を行うようにするの望ましい。
ところが、目標車間時間t1(例えば、1.5sec)のように短い車間時間内に、ドライバが先行車の急制動を判断し且つブレーキペダル28を操作することは容易なことではなく、通常は、操作に要する余裕空走時間(余裕時間)として少なくとも所定時間t2(所定の余裕時間であって、例えば、2.0sec)程度が必要とされている。
【0028】
そこで、本発明では、目標車間時間が値t1(例えば、1.5sec)と短い時間でありながら、余裕空走時間t2(例えば、2.0sec)を確保するようにしており、この余裕空走時間t2を確保するのに所定値X1(例えば、0.24G)が重要となっている。以下、所定値X1(例えば、0.24G)について説明する。ここで改めて図4を参照すると、余裕空走時間t2(例えば、2.0sec)経過時において自車の車速Vaが少なくとも図中の破線上のB点にあれば、ドライバが余裕空走時間t2経過した時点でブレーキペダル28を操作したとしても、その後自車の車速Vaがブレーキペダル28の操作で上記破線に沿い良好に減少可能であることがわかる。
【0029】
従って、余裕空走時間t2を確保するためには、自車の車速Vaが破線上のB点に達するまで、補助制動によって徐々に車両1を減速させておけばよいことになり、このとき補助制動に要求される減速度が、即ち所定値X1(例えば、0.24G)である。より詳しくは、ブレーキアクチュエータ30の制御遅れ時間t3(例えば、0.5sec)を考慮すると、余裕空走時間t2(例えば、2.0sec)を確保すべく補助制動に必要とされる減速度は、図中A点とB点とを結ぶ線の傾きとして求められることになり、補助制動の減速度はこの傾きから所定値X1(例えば、0.24G)として一義に決定される。
【0030】
つまり、所定値X1(例えば、0.24G)は、先行車が急制動したような場合であっても、余裕空走時間t2(例えば、2.0sec)を確保するために補助制動に必要且つ十分な減速度を意味しており、これにより、少なくとも該所定値X1(例えば、0.24G)の減速度で補助制動を行えば、目標車間時間が値t1(例えば、1.5sec)と短い場合でも、先行車の制動状況如何に拘わらず、車両1のドライバは十分な時間的余裕をもって確実にブレーキペダル28の操作により自車を減速させ先行車に追従させることが可能となるのである。
【0031】
従って、図4中には、例えば、目標車間時間を余裕空走時間と同じ値t2(例えば、2.0sec)に設定したときに自車の目標減速度αaをG1(例えば、0.7G)で減速した場合の自車速Vaの時間変化をも併せて示してあり(二点鎖線で示す)、この場合には、補助制動を行わなくてもブレーキペダル28の操作に十分な時間的余裕があり、良好に自車を先行車との接触なく減速することができるのであるが、上記本発明に係る追尾走行制御を実施することで、目標車間時間が値t1(例えば、1.5sec)と短いような場合であっても、上記目標車間時間を値t2とした場合と同様に余裕空走時間t2(例えば、2.0sec)を確保して時間的余裕を有しながら、ブレーキペダル28の操作によって自車を先行車との接触なく良好且つ安全に減速させることが可能となる。
【0032】
なお、ここに、所定値X1(例えば、0.24G)は、減速度G1(例えば、0.7G)でもって極めて急な制動を行った場合であっても確実に余裕空走時間t2(例えば、2.0sec)を確保可能な減速度であるため、先行車の減速度が値G1より小さい領域(例えば、0.24G〜0.7G)にある場合には、当然のことながら、表1に例示するように、余裕空走時間は値t2よりも長くなり、ドライバがブレーキペダル28を操作するまでに十分な余裕時間が確保されることとなる。
【0033】
【表1】

また、例えば、交通状況等によって目標車間時間が値t1(例えば、1.5sec)よりもさらに短く或いは長く変更されることも考えられるが、このような場合であっても、上述の手法に基づき、図4上で自車の目標減速度αaが値G1(例えば、0.7G)とされたときの余裕空走時間t2(例えば、2.0sec)経過時のB’点を求めるようにすれば、このB’点と上記A点とに基づいて補助制動に必要な減速度(所定減速度)を容易に算出し設定変更することができる。従って、目標車間時間が変更された場合であっても、先行車の制動状況に拘わらず、常に余裕空走時間t2(例えば、2.0sec)を保持し余裕をもってブレーキペダル28を操作することができ、車両1を良好且つ安全に減速させることが可能である。
【0035】
【発明の効果】
以上詳細に説明したように、請求項1の車両の走行制御装置によれば、目標減速度が所定減速度以上のときには減速度が所定減速度にクリップされてアクチュエータにより自動的に付加される制動力が制限されるので、先行車両が急な制動をしたような場合でも、それに応じて自車両が自動的に急制動してしまうことを防止でき、ドライバに違和感を与えないようにできる。
【0036】
また、アクチュエータによる自動制動を補助制動手段として機能させることで、ブレーキペダル操作までの余裕時間(余裕空走時間)を拡大することができ、ドライバのブレーキペダル操作の遅れを回避して減速制御時の車両の走行安全性を向上させることができる。
そして、先行車両の減速度が大きく、自車両の目標減速度が大きいような場合であっても、ブレーキペダルを操作するまでの余裕時間を常に最低限必要且つ十分な所定の余裕時間以上にでき、余裕時間の不足なくドライバのブレーキペダル操作の遅れを良好に回避して車両の走行安全性を確保することができる。
【図面の簡単な説明】
【図1】車両に搭載された本発明に係る走行制御装置の概略構成図である。
【図2】本発明に係る追尾走行制御ルーチンを示すフローチャートである。
【図3】図2中の補助制動力演算のサブルーチンを示すフローチャートである。
【図4】自車が目標車間時間t1で追尾走行制御されているときに、先行車が減速度G1で減速した場合の先行車の車速Vfと、本発明に係る走行制御を実施した場合の自車の車速Vaの時間変化を示す図である。
【符号の説明】
1 車両(自車両)
2 スキャン式レーザレーダ
4 CCDカメラ
24 サービスブレーキ(制動装置)
28 ブレーキペダル
30 ブレーキアクチュエータ
32 車輪速センサ
50 電子制御ユニット(ECU)
Claims (1)
- 自車両と同一の走行車線を走行している先行車両の追尾走行制御を行う車両の走行制御装置において、
自車両に制動力を付加する制動装置と、
前記制動装置を自動的に作動させるアクチュエータと、
先行車両の減速度を検出する先行車減速度検出手段と、
前記先行車両の減速度に応じて自車両の目標減速度を演算する目標減速度演算手段と、
先行車両が減速しているとき、前記目標減速度が所定減速度未満のときには前記目標減速度に応じた制動力を付加すべく前記アクチュエータを作動制御する一方、前記目標減速度が前記所定減速度以上のときには該所定減速度に応じただけの制動力を付加すべく前記アクチュエータを作動制御する制動制御手段とを備え、
前記所定減速度は、自車両と先行車両間の車間時間がドライバによるブレーキペダルの操作開始までに最低限必要とされる所定の余裕時間より短いときには、該所定減速度に応じた制動力を発生するよう前記アクチュエータを作動させて自車両を減速させたと仮定した場合に前記ブレーキペダルの操作開始までの余裕時間が少なくとも前記所定の余裕時間以上確保される減速度に設定されてなることを特徴とする車両の走行制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP16479897A JP3832526B2 (ja) | 1997-06-20 | 1997-06-20 | 車両の走行制御装置 |
| KR1019980022861A KR100276964B1 (ko) | 1997-06-20 | 1998-06-18 | 차량의 주행제어장치 |
| US09/099,140 US6134497A (en) | 1997-06-20 | 1998-06-18 | Vehicle running control apparatus and vehicle running control method |
| DE19827445A DE19827445A1 (de) | 1997-06-20 | 1998-06-19 | Fahrtsteuervorrichtung für ein Fahrzeug |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP16479897A JP3832526B2 (ja) | 1997-06-20 | 1997-06-20 | 車両の走行制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH1111273A JPH1111273A (ja) | 1999-01-19 |
| JP3832526B2 true JP3832526B2 (ja) | 2006-10-11 |
Family
ID=15800143
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP16479897A Expired - Lifetime JP3832526B2 (ja) | 1997-06-20 | 1997-06-20 | 車両の走行制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6134497A (ja) |
| JP (1) | JP3832526B2 (ja) |
| KR (1) | KR100276964B1 (ja) |
| DE (1) | DE19827445A1 (ja) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6353812B2 (en) | 1998-02-19 | 2002-03-05 | Certco, Inc. | Computer-based method and system for aiding transactions |
| DE19749296C5 (de) * | 1997-11-07 | 2007-01-11 | Daimlerchrysler Ag | Verfahren zur Bestimmung eines Auslöseschwellenwertes für einen automatischen Bremsvorgang |
| DE19940252A1 (de) * | 1998-10-27 | 2000-06-15 | Continental Teves Ag & Co Ohg | Vorrichtung und Verfahren zur Bremskraftsteuerung einer Bremsanlage |
| DE19859284A1 (de) * | 1998-12-22 | 2000-06-29 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Geschwindigkeits- und Abstandsregelung eines Kraftfahrzeuges |
| DE19936436A1 (de) * | 1999-03-04 | 2001-01-04 | Continental Teves Ag & Co Ohg | Verfahren zum Erkennen einer Notbremssituation |
| EP1065092A3 (en) * | 1999-07-01 | 2005-03-30 | Hitachi, Ltd. | Apparatus for controlling braking and propulsion in a vehicle |
| DE19937942B4 (de) * | 1999-08-11 | 2005-12-22 | Daimlerchrysler Ag | Verfahren und Steuerungssystem zur Abstands- und Geschwindigkeitsregelung eines Fahrzeugs |
| DE19960782A1 (de) * | 1999-12-16 | 2001-06-21 | Mannesmann Vdo Ag | Verfahren zur Beschleunigungsüberwachung für eine Längsdynamiksteuerung oder -regelung in Kraftfahrzeugen |
| DE10007501A1 (de) * | 2000-02-18 | 2001-09-13 | Daimler Chrysler Ag | Verfahren und Vorrichtung zur Erfassung und Überwachung einer Mehrzahl von vorausfahrenden Fahrzeugen |
| DE10025678B4 (de) * | 2000-05-24 | 2006-10-19 | Daimlerchrysler Ag | Kamerabasiertes Precrash-Erkennungssystem |
| US6502053B1 (en) * | 2000-06-12 | 2002-12-31 | Larry Hardin | Combination passive and active speed detection system |
| JP3611028B2 (ja) * | 2000-08-29 | 2005-01-19 | トヨタ自動車株式会社 | 走行制御装置 |
| JP3809756B2 (ja) * | 2000-08-29 | 2006-08-16 | トヨタ自動車株式会社 | 走行制御装置 |
| DE10118708A1 (de) * | 2001-04-12 | 2002-10-17 | Bosch Gmbh Robert | Verfahren zur Regelung der Geschwindigkeit eines Kraftfahrzeugs |
| DE10151717A1 (de) * | 2001-10-19 | 2003-04-30 | Bayerische Motoren Werke Ag | Geschwindigkeitsregel-System mit Abstandssensorik für ein Kraftfahrzeug |
| JP3880841B2 (ja) * | 2001-11-15 | 2007-02-14 | 富士重工業株式会社 | 車外監視装置 |
| AU2002309107A1 (en) * | 2002-06-07 | 2003-12-22 | Neelam Agarwal | Navdurga vehicle safety systems |
| US6834232B1 (en) | 2003-07-30 | 2004-12-21 | Ford Global Technologies, Llc | Dual disimilar sensing object detection and targeting system |
| US7389171B2 (en) * | 2003-12-22 | 2008-06-17 | Ford Global Technologies Llc | Single vision sensor object detection system |
| JP4543910B2 (ja) * | 2004-01-29 | 2010-09-15 | トヨタ自動車株式会社 | 車輌の減速度制御装置 |
| JP4532181B2 (ja) | 2004-06-24 | 2010-08-25 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP4831509B2 (ja) * | 2005-01-25 | 2011-12-07 | ヴアブコ・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 自動車における衝突警告方法 |
| EP2095351B1 (de) * | 2006-10-13 | 2014-06-25 | Continental Teves AG & Co. oHG | System zur bestimmung von objekten |
| JP2009107574A (ja) * | 2007-10-31 | 2009-05-21 | Toyota Motor Corp | 車両用走行制御装置 |
| JP4564041B2 (ja) * | 2007-11-27 | 2010-10-20 | 本田技研工業株式会社 | 車両の走行制御装置 |
| US9963127B2 (en) * | 2010-01-15 | 2018-05-08 | Volvo Car Corporation | Collision mitigation system and method for braking a vehicle |
| US8972147B2 (en) | 2011-01-10 | 2015-03-03 | Bendix Commercial Vehicle Systems Llc | ACC and AM braking range variable based on internal and external factors |
| KR20130009132A (ko) * | 2011-07-14 | 2013-01-23 | 현대자동차주식회사 | 가시광 통신을 이용한 차량 제어 장치 및 그 방법 |
| US8510029B2 (en) * | 2011-10-07 | 2013-08-13 | Southwest Research Institute | Waypoint splining for autonomous vehicle following |
| WO2013065089A1 (ja) * | 2011-11-02 | 2013-05-10 | トヨタ自動車株式会社 | 制動制御装置 |
| US10737665B2 (en) * | 2012-08-28 | 2020-08-11 | Ford Global Technologies, Llc | Vehicle braking based on external object communications |
| CN104648359B (zh) * | 2015-03-16 | 2017-05-31 | 青岛建邦供应链股份有限公司 | 一种智能刹车系统 |
| CN105292118A (zh) * | 2015-11-10 | 2016-02-03 | 中国重汽集团济南动力有限公司 | 一种重型汽车坡道辅助起步控制方法 |
| JP7151672B2 (ja) * | 2019-09-11 | 2022-10-12 | いすゞ自動車株式会社 | 車両制御装置 |
| JP7343844B2 (ja) * | 2020-05-26 | 2023-09-13 | トヨタ自動車株式会社 | 運転支援装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2722746B2 (ja) * | 1990-01-29 | 1998-03-09 | 日産自動車株式会社 | 自動ブレーキ装置 |
| US5165497A (en) * | 1991-02-26 | 1992-11-24 | Chi C Y | Automatic safety driving distance control device for a vehicle |
| DE4209060C2 (de) * | 1992-03-20 | 1994-12-15 | Daimler Benz Ag | Verfahren zur Regelung des Abstandes zwischen fahrenden Kraftfahrzeugen |
| JP3232724B2 (ja) * | 1992-12-08 | 2001-11-26 | 株式会社デンソー | 車間距離制御装置 |
| JPH07251651A (ja) * | 1994-03-15 | 1995-10-03 | Nissan Motor Co Ltd | 車間距離制御装置 |
| US5572449A (en) * | 1994-05-19 | 1996-11-05 | Vi&T Group, Inc. | Automatic vehicle following system |
| JP3380624B2 (ja) * | 1994-09-14 | 2003-02-24 | マツダ株式会社 | 車両の走行状態検出装置 |
| JP3044524B2 (ja) * | 1995-05-23 | 2000-05-22 | 本田技研工業株式会社 | 車両における対照物検知方法 |
| JPH08318765A (ja) * | 1995-05-25 | 1996-12-03 | Hitachi Ltd | 情報化自動車制御装置及び方法 |
| JP3588868B2 (ja) * | 1995-08-04 | 2004-11-17 | 日産自動車株式会社 | 車両用駆動力制御装置 |
| JP3726923B2 (ja) * | 1996-04-10 | 2005-12-14 | 富士重工業株式会社 | 車両用運転支援装置 |
| JP3805832B2 (ja) * | 1996-07-10 | 2006-08-09 | 富士重工業株式会社 | 車両用運転支援装置 |
| JP3477015B2 (ja) * | 1996-12-25 | 2003-12-10 | トヨタ自動車株式会社 | 車間距離制御装置 |
| DE19744720A1 (de) * | 1997-10-10 | 1999-04-15 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Regelung einer Fahrgeschwindigkeit eines Kraftfahrzeugs |
-
1997
- 1997-06-20 JP JP16479897A patent/JP3832526B2/ja not_active Expired - Lifetime
-
1998
- 1998-06-18 KR KR1019980022861A patent/KR100276964B1/ko not_active IP Right Cessation
- 1998-06-18 US US09/099,140 patent/US6134497A/en not_active Expired - Lifetime
- 1998-06-19 DE DE19827445A patent/DE19827445A1/de not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| KR19990007083A (ko) | 1999-01-25 |
| DE19827445A1 (de) | 1998-12-24 |
| US6134497A (en) | 2000-10-17 |
| JPH1111273A (ja) | 1999-01-19 |
| KR100276964B1 (ko) | 2001-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3832526B2 (ja) | 車両の走行制御装置 | |
| US7866427B2 (en) | Vehicle multi-stage integrated brake assist for a collision preparation system | |
| US7840354B2 (en) | Method and device for automatically triggering a vehicle deceleration | |
| JP3849430B2 (ja) | 車両用走行制御装置 | |
| US6502908B1 (en) | Control system for a vehicle | |
| EP3789254A1 (en) | Method, device and system for automatic braking of vehicle | |
| JP3952104B2 (ja) | 車両の走行制御装置 | |
| JP3327217B2 (ja) | 車両の走行制御方法 | |
| JPH1067256A (ja) | 車両の速度を制御するための方法及び装置 | |
| JP2006175941A (ja) | 加減速度制御装置 | |
| CN110641466B (zh) | 车辆控制装置 | |
| JP3707521B2 (ja) | 車両の走行制御装置 | |
| JP4039062B2 (ja) | 駐車支援装置 | |
| JP3381778B2 (ja) | 車両の走行制御方法 | |
| JP3651289B2 (ja) | ブレーキ制御装置 | |
| JP3957057B2 (ja) | 車両走行制御装置および方法 | |
| JP2002166747A (ja) | 車両の走行制御装置 | |
| JP3747989B2 (ja) | 車両の走行制御装置 | |
| JPH11334554A (ja) | 車両の走行制御装置 | |
| JP2000006684A (ja) | 車両の走行制御装置 | |
| JP2778310B2 (ja) | 車両の操作機器制御装置 | |
| JPH11348599A (ja) | 車両の走行制御装置 | |
| JP4624726B2 (ja) | 車間距離制御装置 | |
| JP3238588B2 (ja) | 車間距離制御装置 | |
| JP3557890B2 (ja) | 車間距離制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040107 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20040922 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041119 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20041125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060628 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060711 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100728 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110728 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120728 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120728 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130728 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130728 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140728 Year of fee payment: 8 |
|
| EXPY | Cancellation because of completion of term |