JP3777954B2 - 産業車両の駆動制御装置 - Google Patents
産業車両の駆動制御装置 Download PDFInfo
- Publication number
- JP3777954B2 JP3777954B2 JP2000207898A JP2000207898A JP3777954B2 JP 3777954 B2 JP3777954 B2 JP 3777954B2 JP 2000207898 A JP2000207898 A JP 2000207898A JP 2000207898 A JP2000207898 A JP 2000207898A JP 3777954 B2 JP3777954 B2 JP 3777954B2
- Authority
- JP
- Japan
- Prior art keywords
- drive
- speed
- wheel
- driving
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/10—Indicating wheel slip ; Correction of wheel slip
- B60L3/102—Indicating wheel slip ; Correction of wheel slip of individual wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/51—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells characterised by AC-motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/14—Dynamic electric regenerative braking for vehicles propelled by ac motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/40—Working vehicles
- B60L2200/42—Fork lift trucks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/24—Driver interactions by lever actuation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/60—Electric or hybrid propulsion means for production processes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Description
【発明の属する技術分野】
本発明は、リーチ型フォークリフトトラック等の電気式産業車両において駆動操舵輪の駆動力又は制動力を制御するための産業車両の駆動制御装置に関するものである。
【0002】
【従来の技術】
従来、リーチ型フォークリフトトラック(以下、単にリーチフォークリフトという)は、車体前部に設けられた左右一対のレグにそれぞれ前輪を支持し、運転席が設けられた車体後部の下側に駆動操舵輪及びキャスタ輪を後輪として備えている。そして、左右のレグの間には、マスト装置が前後方向に移動可能に支持されている。
【0003】
リーチフォークリフトでは、駆動操舵輪の輪重が、マスト位置及び積荷重によって大きく変化する。そして、積載荷重が最大でマスト位置が最大限リーチされたときには、駆動操舵輪の輪重が最も小さくなる。この状態で、水に濡れたコンクリート床面上や冷凍倉庫内の床面上でフォークリフトを発進させようとすると、駆動操舵輪がスリップして床面に対する駆動力を確実に確保することができなかった。このため、車体を迅速に加速させることができない上に、車体の後部が左右に振られたり、又、駆動操舵輪が早期に摩耗する問題があった。
【0004】
このような問題を解決しようとするリーチフォークリフトが特開平8−265917号公報で提案されている。このリーチフォークリフトは、左右前輪にそれぞれ前輪駆動用モータを備えている。駆動制御装置は、駆動操舵輪の回転数から求めた駆動操舵輪の速度を左右各前輪の予測速度に換算するとともに、各前輪の回転数からそれぞれの実際の速度を求める。さらに、駆動制御装置は、左右各前輪毎に、その予測速度と速度との差をすべり速度として演算する。そして、駆動制御装置は、このすべり速度が所定の基準値を超えるとき、左右の各前輪駆動用モータを制御して前輪を駆動するとともに駆動操舵輪の駆動用モータの駆動力を低減する。このため、滑りやすい路面上での発進時や、駆動操舵輪の輪重が最も小さい状態での発進時等においても、駆動操舵輪のスリップが抑制され路面に対する駆動力がより確実に確保される。
【0005】
【発明が解決しようとする課題】
しかしながら、特開平8−265917号公報のリーチフォークリフトでは、左右いずれかの前輪を旋回中心とする旋回時に駆動操舵輪が大きくスリップした場合、すべり速度が基準値を超えて旋回中心にある前輪が駆動される可能性がある。この場合、左右前輪の速度差に応じた旋回中心の位置と、駆動操舵輪の操舵角に応じた本来の旋回中心の位置とにずれができる。その際、前輪が駆動されていると、左右前輪の速度が駆動操舵輪の速度に対して遅くなり、左右前輪がブレーキをかける状態となる。その結果、車両が円滑に旋回しなくなる問題がある。
【0006】
尚、このような問題は、左右一対の前輪を従動輪とし駆動操舵輪を後輪として備えたリーチフォークリフトのみならず、左右一対の後輪を従動輪とし駆動操舵輪を前輪として備えた三輪型の産業車両においても発生する。
【0007】
本発明は、上記問題点を解決するためになされたものであって、その目的は、駆動操舵輪の路面に対する駆動力又は制動力をより確実に確保することができ、しかも、左右従動輪のいずれか一方を旋回中心とする旋回を円滑に行うことができる産業車両の駆動制御装置を提供することにある。
【0008】
【課題を解決するための手段】
上記問題点を解決するため、請求項1に記載の発明は、左右一対の従動輪と共に産業車両の前後輪を構成する駆動操舵輪を駆動する駆動モータの駆動トルク又は制動トルクを、運転者が操作する駆動力調整操作手段の操作量に基づいて制御する産業車両の駆動制御装置において、車両の旋回時には旋回外側となる前記従動輪の回転数から求めた従動輪速度を前記駆動操舵輪の速度に換算した換算駆動輪速度と、前記駆動操舵輪の回転数から求めた駆動輪速度とに基づいて該駆動操舵輪のスリップを検出し、該駆動操舵輪のスリップによって路面に対する駆動力又は制動力が低下しないようにするべく、前記駆動力調整操作手段の操作量に対する前記駆動モータの駆動トルク又は制動トルクを、前記駆動輪速度と前記換算駆動輪速度との速度差であるすべり速度が予め設定された基準値を超えないように制限し、前記駆動操舵輪の操舵角がより大きな値であるときには、前記基準値をより超え難いように前記すべり速度を変換した補正すべり速度が該基準値を超えないように前記駆動モータの駆動トルク又は制動トルクを制限することを特徴とする産業車両の駆動制御装置である。
【0009】
請求項1に記載の発明によれば、路面に対してスリップしない状態で回転する従動輪の回転数から、従動輪の位置における車速としての従動輪速度が検出される。一方、駆動力が路面との間の摩擦力を超えた状態では路面に対してスリップする状態で回転する駆動操舵輪の回転数から、駆動操舵輪の位置における仮想の車速としての駆動輪速度が検出される。そして、従動輪速度と駆動輪速度との比較により、駆動操舵輪のスリップが検出される。この検出結果に基づいて、駆動操舵輪の路面に対する駆動力が低下する状態が検出される。そして、駆動モータが制御され駆動力調整操作手段の操作量に対する駆動モータの駆動トルクが制限されることで、車両の加速時における駆動操舵輪のスリップが抑制され路面に対する駆動力の低下が抑制される。又は、駆動モータの制動トルクが制限されることで、車両の制動時における駆動操舵輪のスリップが抑制される。このとき、車両の旋回時には旋回外側の従動輪速度から換算駆動輪速度が求められるので、旋回内側の従動輪が旋回中心となっても、駆動操舵輪のスリップが検出される。そして、駆動力調操作手段の操作量や路面の状態に拘らず、路面に対する駆動力又は制動力の低下が抑制される。従って、左右の従動輪のいずれかを旋回中心とする車両の旋回時に駆動操舵輪がスリップしても、従動輪を駆動することなくスリップが抑制される。
【0011】
また、駆動操舵輪の位置における実際の車速としての換算駆動輪速度と仮想の車速としての駆動輪速度とから駆動操舵輪のスリップが検出される。
【0013】
また、駆動輪速度と換算駆動輪速度との速度差であるすべり速度が所定の基準値を超えたことによって、駆動操舵輪がスリップして路面に対する駆動力又は制動力が低下する状態であることが検出される。そして、速度差が基準値を超えないように駆動モータの駆動トルク又は制動トルクが制限されることで駆動操舵輪のスリップが抑制される。
【0015】
また、駆動操舵輪の操舵角がより大きくなるほど換算駆動輪速度の誤差が大きくなるため、駆動操舵輪のスリップがそれほど大きくなく駆動力がそれほど低下していない状態であってもすべり速度が基準値を超えて駆動力が制限される可能性がある。ここでは、操舵角がより大きくなっても補正すべり速度が基準値を超え難いので駆動輪が大きくスリップしていないにも拘らず基準値を超えることがない。従って、操舵角が大きなときに、駆動操舵輪がスリップして路面に対する駆動力又は制動力が低下する状態でないにも拘らず駆動モータの駆動トルク又は制動トルクが制限されない。その結果、車両の旋回時にも路面に対する駆動力又は制動力を確実に確保することができる。
【0020】
請求項2に記載の発明は、請求項1に記載の産業車両の駆動制御装置において、前記駆動モータによる回生制動時に、前記駆動力調整操作手段の操作量に対する前記駆動モータの制動力を制限するときに、前記従動輪に設けられたブレーキ装置を制御して該従動輪を制動することを特徴とする。
【0021】
請求項2に記載の発明によれば、請求項1に記載の発明の作用に加えて、駆動モータによる回生制動時に駆動モータの制動力が制限されるときには、油圧ブレーキが作動され従動輪が制動される。従って、制動時には、駆動操舵輪及び従動輪によって車体が制動されるので、滑り易い路面上であってもより短い制動距離で停止させることができる。
【0024】
【発明の実施の形態】
(第1の実施の形態)
以下、本発明をリーチ型フォークリフトトラックの駆動制御装置に具体化した第1の実施の形態を図1〜図9に従って説明する。
【0025】
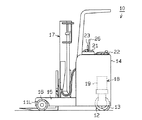
図2,3に示すように、産業車両としてのリーチ型フォークリフトトラック10(以下、リーチフォークリフトという)は、左右一対の従動輪としての前輪11L,11Rと、駆動操舵輪(以下、単に駆動輪という)12及びキャスター輪13からなる後輪とを備えている。
【0026】
リーチフォークリフト10には、その車体14の前部に左右一対のリーチレグ15が設けられている。各リーチレグ15の先端部には、前記前輪11L,11Rがそれぞれ支持されている。各前輪11L,11Rには、それぞれ油圧ブレーキ16が設けられている。又、両リーチレグ15の間には、マスト装置17が前後に移動可能に支持されている。
【0027】
車体14の後部には、その左部分にドライブユニット18が設けられている。ドライブユニット18は駆動モータ19を備え、その下部に支持した前記駆動輪12を駆動する。尚、本実施形態では、駆動モータ19は交流誘導モータである。又、車体後部の右部分には運転席20が設けられ、その下側に前記キャスター輪13が支持されている。ドライブユニット18とキャスター輪13とは、図示しないサスペンション機構によって上下に互いに逆向きに変位可能に支持されている。そして、駆動輪12及びキャスター輪13は、サスペンション機構によって、車両重心の車両の前後方向における位置が変化しても駆動輪12の輪重が変化しにくいように支持されている。
【0028】
車体後部の上側には、運転席20の前側に操作盤21が設けられ、運転席20の左側にハンドル22が設けられている。ハンドル22は、前記駆動輪12を操舵する。操作盤21には駆動力調整操作手段としてのアクセルレバー23、リフトレバー24、リーチレバー25及びチルトレバー26が設けられている。
【0029】
次に、前記油圧ブレーキ16を制御するための油圧回路について説明する。
図1に示すように、車体後部にはオイルタンク30、荷役モータ31、オイルポンプ32、ブレーキ制御バルブユニット33等が設けられている。
【0030】
荷役モータ31はオイルポンプ32を駆動してオイルタンク30の作動油を所定の油圧でブレーキ制御バルブユニット33及びオイルコントロールバルブ34に供給する。尚、オイルコントロールバルブ34は図示しないリフトシリンダ、リーチシリンダ及びチルトシリンダに対して供給する作動油を制御するためのバルブユニットであって、リフトレバー24、リーチレバー25及びチルトレバー26によってそれぞれ操作される。
【0031】
ブレーキ制御バルブユニット33は、図示しない減圧弁、シャットオフ弁、リニアソレノイド弁及びアキュームレータ33a等が一体化された弁ユニットである。ブレーキ制御バルブユニット33は、オイルポンプ32から所定の油圧で供給される作動油をアキュームレータ33aに蓄圧し、電気制御によって各油圧ブレーキ16に出力する油圧を制御する。
【0032】
各油圧ブレーキ16は、所定油圧で供給される作動油によって作動し、前輪11L,11Rを制動する。
次に、駆動モータ19及び荷役モータ31を制御するための電気的構成について説明する。
【0033】
図1に示すように、車両後部には、アクセル開度センサ40、後輪側の回転数センサ41a,41b、操舵角センサ42、圧力スイッチ43及びコントローラ44が設けられ、各リーチレグ15には前輪側の回転数センサ45L,45Rが設けられている。本実施形態では、回転数センサ41a,41b及びコントローラ44が駆動輪速度検出手段を構成し、回転数センサ45L,45R及びコントローラ44が従動輪速度検出手段を構成する。又、コントローラ44がトルク制御手段である。さらに、アクセル開度センサ40、回転数センサ41a,41b、操舵角センサ42、コントローラ44及び回転数センサ45L,45Rが駆動制御装置を構成する。
【0034】
アクセル開度センサ40は操作盤21の下方に配置され、アクセルレバー23のアクセル開度、即ち、中立位置での操作量を「0」として前進側及び後進側のアクセル開度ACCを検出して出力する。
【0035】
回転数センサ41a,41bは例えばホール素子、磁気抵抗素子等の磁気センサであって、駆動モータ19の出力軸に固定された図示しないギヤを被検出体としてその回転数を検出する。各回転数センサ41a,41bは、駆動輪回転数としての後輪回転数ND と、駆動モータ19のモータ回転数NM とに対応するパルス信号を生成してコントローラ44に出力する。又、各回転数センサ41a,41bは、駆動モータ19の回転方向に応じて位相のずれが逆となるパルス信号を出力する。
【0036】
操舵角センサ42はドライブユニット18の近傍に設けられ、直進状態を「0」として右方向及び左方向の操舵角θを検出し、その検出信号をコントローラ44に出力する。
【0037】
圧力スイッチ43は前記ブレーキ制御バルブユニット33に設けられ、各油圧ブレーキ16に供給されるように減圧された油圧が所定の油圧を下回ったときに信号をコントローラ44に出力する。
【0038】
回転数センサ45L,45Rは例えばホール素子、磁気抵抗素子を検出素子として備えた回転数センサであってリーチレグ15に設けられている。各回転数センサ45L,45Rはそれぞれ前輪11L,11Rに設けられた被検出部を検出することで、各前輪11L,11Rの従動輪回転数としての前輪回転数NLF,NRFに対応したパルス信号をコントローラ44に出力する。
【0039】
コントローラ44は図示しない制御装置、三相インバータ回路等からなり、アクセル開度ACC、後輪回転数ND 、モータ回転数NM 、操舵角θ及び前輪回転数NFL,NRFに基づいて駆動モータ19の回転方向、駆動トルク及び制動トルクを制御する。制御装置は、マイクロコンピュータから構成されている。尚、駆動トルクは駆動モータ19が駆動輪12を回転駆動して車両を前進又は後進させるときに発生するトルクであり、制動トルクは前進状態又は後進状態からのスイッチバック操作時に回生制動によって発生するトルクである。
【0040】
又、コントローラ44は、各レバー24,25,26が操作されるときに荷役モータ31を運転するとともに、各レバー24〜26が操作されていないときであっても圧力スイッチ43から信号を入力するときには荷役モータ31を運転する。
【0041】
コントローラ44は、車両の走行中における駆動モータ19の運転制御、車両の加速時及び制動時における駆動モータ19の駆動力及び制動力制御(トラクション制御)、制動時の油圧ブレーキ16の制動制御等を行う。コントローラ44は、予め記憶されている制御プログラムを前記マイクロコンピュータが実行することによって前記各制御を行う。
【0042】
コントローラ44は、アクセルレバー23が前進側又は後進側に操作されたときに、駆動モータ19を運転制御して車両を走行させる。
駆動モータ19の運転制御として、コントローラ44は、アクセル開度センサ40が検出する操作量としてのアクセル開度ACCと、回転数センサ41a,41bが検出するモータ回転数NM とから、予め設定されている目標駆動トルクを求める。そして、予め設定されている増大量又は減少量ずつ駆動モータ19の駆動トルクを増大又は減少させて目標駆動トルクで運転する。コントローラ44は、アクセル開度ACCが前進側であるときには駆動モータ19を正転駆動し、アクセル開度ACCが後進側であるときには駆動モータ19を逆転駆動する。
【0043】
又、コントローラ44は、車両の前進状態及び後進状態での加速時に、駆動輪12のスリップを抑制して路面に対する駆動力の低下を抑制するための駆動モータ19の駆動力制御を行う。
【0044】
駆動力制御として、コントローラ44は、各回転数センサ45L,45Rが検出する前輪回転数NLF,NRFから、車体14の各前輪11L,11Rの位置における車速である従動輪速度としての前輪速度VLF,VRFを求める。詳述すると、コントローラ44は、予め記憶されている前輪11L,11Rの半径と前記回転数NLF,NRFとから、各前輪11L,11R毎に前輪速度VLF,VRFを求める。この前輪速度VLF,VRFは、前輪11L,11Rと路面との間にスリップがないものとして求められる。
【0045】
又、コントローラ44は、各回転数センサ41a,41bが検出する後輪回転数ND から、駆動輪速度としての後輪速度VD を求める。詳述すると、コントローラ44は、予め記憶されている駆動輪12の半径と前記後輪回転数ND とから後輪速度VD を求める。この後輪速度VD は、駆動輪12と路面との間にスリップがあると駆動輪12の位置における車速よりも大きくなる。
【0046】
次に、コントローラ44は、各前輪速度VLF,VRFを、駆動輪12の速度に換算した換算駆動輪速度としての換算後輪速度VDPを求める。即ち、この換算後輪速度VDPは、駆動輪12と路面との間にスリップがないものとして求めた後輪速度である。
【0047】
詳述すると、コントローラ44は、操舵角センサ42が検出する操舵角θに基づき、車両が直進状態であるか又は左右いずれかの旋回状態であるかを判断する。そして、直進状態であるときには、左右いずれか一方の回転数センサ45L(45R)が検出する前輪回転数NLF(NRF)から前輪速度VLF(VRF)を求め、この前輪速度VLF(VRF)を換算して換算後輪速度VDPを求める。又、車両が左右いずれかの旋回状態であるときには、旋回外側となる前輪11L(11R)の前輪回転数NLF(NRF)から前輪速度VLF(VRF)を求め、この前輪速度VLF(VRF)を換算して換算後輪速度VDPを求める。
【0048】
具体的には、コントローラ44は、以下のようにして前輪速度VLF(VRF)から換算後輪速度VDPを求める。
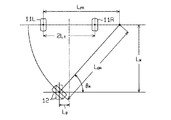
図4,5に示すように、左右前輪11L,11Rはトレッド2LT だけ車両の幅方向に離れた位置に配置され、左右前輪11L,11Rと駆動輪12とは、ホイールベースLW だけ前後方向に離れた位置に配置されている。そして、駆動輪12は、左右前輪11L,11Rの左右方向での中心線から車両左側にLD だけ偏った位置に配置されている。そして、駆動輪12は、その操舵角θが直進時の0°から最大80°となるまで右操舵され、又、最大100°となるまで左操舵されるものとして説明する。
【0049】
図4に示すように、駆動輪12が右操舵された状態では、旋回外側となる左側前輪11Lの旋回半径LFR=(LW /tanθR −LT +LD )となり、駆動輪12の旋回半径LDR=(LW /sinθR )となる。従って、左側前輪11Lの前輪速度VLFに対して、スリップがないと仮定したときの後輪速度VD の速度比VD /VFLは、VD /VLF=LDR/LFR=(LW /(LW cosθR +(LT −LD )sinθR ))となる。そして、コントローラ44は、右操舵時には、この速度比VD /VLFを変換係数K1(θR )として、旋回外側の前輪である左側前輪11Lの前輪速度VLFに乗じることで換算後輪速度VDPを求める。
【0050】
一方、図5に示すように、駆動輪12が左操舵された状態では、旋回外側となる右側前輪11Rの旋回半径LFL=(LW /tanθL +LT +LD )となり、駆動輪12の旋回半径LDL=(LW /sinθL )となる。従って、右側前輪11Rの前輪速度VRFに対して、すべりがないと仮定したときの後輪速度VD の速度比VD /VRFは、VD /VRF=LDL/LFL=(LW /(LW cosθL +(LT +LD )sinθ))となる。そして、コントローラ44は、右操舵時には、この速度比VD /VRFを変換係数K1(θL )として、旋回外側の前輪である右側前輪11Rの前輪速度VRFに乗じることで換算後輪速度VDPを求める。
【0051】
尚、右旋回時の変換係数K1(θ)は、図6に示すように、右操舵角θが0〜80°の範囲に対して1.0〜約3.2の範囲で変化する。一方、左旋回時の変換係数K1(θ)は、左操舵角θが0〜100°の範囲に対して約0.9〜約3.0の範囲で変化する。図6に示すように、変換係数K1(θ)は、操舵角θがより大きいほどその変化量がより大きくなる特性を示す。
【0052】
又、コントローラ44は、前記後輪速度VD から換算後輪速度VDPを差し引いた速度差(VD −VDP)を、駆動輪12と路面とのすべり速度ΔVD (=VD −VDP)として求める。
【0053】
次に、コントローラ44は、操舵角センサ42から入力する操舵角θに応じて予め設定されている変換係数K2(θ)を前記すべり速度ΔVD に乗じた値を補正すべり速度ΔVDK(=ΔVD ・K2(θ))として求める。本実施形態では、変換係数K2(θ)は、図7に示すように、操舵方向毎に、操舵角θが「0」〜最大操舵角の範囲に対して、1.0〜0.2の範囲で連続的に変化するように設定されている。
【0054】
補正すべり速度ΔVDKを求める理由を述べる。第1の理由としては、前輪側の回転数センサ45L,45Rがホール素子、磁気抵抗素子等の磁気センサである場合には、前輪速度VLF,VRFの検出分解能は前輪11L,11Rの1回転当たり数十パルス程度である。このため、図8に示すように、車両発進時には、前輪速度VLF,VRFが実際の前輪11L,11の速度よりも遅れて検出される状態が発生し、前輪速度VLF,VRFが最大0.1m/s程度下回ることがある。尚、回転数センサ45L,45Rが出力するパルス信号から前輪速度VLF,VRFを求めると、検出値が変化しない時間がマイクロコンピュータの制御周期に比較して数倍の大きさとなる。このため、実際には、回転数センサ45L,45Rが出力するパルス信号に基づく検出値を一次フィルタ処理した値を前輪速度VLF,VRFとしている。一方、後輪側の回転数センサ41a,41bによる後輪速度VD の検出分解能は、駆動輪12の1回転当たり数百パルスである。
【0055】
第2の理由として、操舵角センサ42には検出誤差があるが、図6に示すように、操舵角θが大きくなるほど変換係数K1(θ)の変化量がより大きくなるので、操舵角θが大きいほど変換係数K1(θ)が実際の値からより大きくずれる傾向がある。
【0056】
この2つの理由によって、車両の加速時の前輪速度VLF,VRFがより小さいほど、又、旋回時の操舵角θが大きいほど、求められた換算後輪速度VDPが駆動輪12の位置における実際の車速よりもより小さくなりすべり速度ΔVD が実際より大きくなる傾向がある。そこで、本実施形態では、操舵角θがより大きいときほど、すべり速度ΔVD をより小さな補正すべり速度ΔVDKに変換する変換係数K2(θ)を設定する。そして、換算後輪速度VDPが求められたときの操舵角θに対応する変換係数K2(θ)をすべり速度ΔVD に乗じた補正すべり速度ΔVDKを求める。従って、補正すべり速度ΔVDKは、車両の加速時においては前輪速度VLF,VRFの検出遅れによって、見かけ上のすべり速度ΔVD が実際よりも大きくならないうようにし、車両の旋回時においては操舵角θの検出誤差によって、見かけ上のすべり速度ΔVD が実際よりも大きくならないようにする。尚、操舵角θがより大きな旋回状態では、一般的に車速がより低くなる。このため、操舵角θがより大きくなるほどより小さくなる変換係数K2(θ)を設定することは、車速がより低くなるほどより小さくなる変換係数K2(θ)を設定することでもある。
【0057】
次に、コントローラ44は、アクセルレバー23のアクセル開度ACCに基づいて駆動モータ19を運転制御するときに、前記補正すべり速度ΔVDPが予め設定された基準値範囲内の値となるように駆動モータ19の駆動トルクを目標駆動トルクよりも制限する。
【0058】
すべり速度ΔVD に対する駆動輪12と路面との間の摩擦係数の関係は、リーチフォークリフト10の全車速範囲(例えば、最高10km/hまでの車速域)では車速に関係のない特性を示し、図9に示すように、すべり速度ΔVD が約0.1のときに摩擦係数が最大となることが知られている。詳述すると、すべり速度ΔVD が「0」から約0.1の間では摩擦係数が急激に増大する。そして、すべり速度ΔVD が約0.1から約0.3の間では摩擦係数が比較的急激に減少する。さらに、すべり速度ΔVD が約0.3以上の範囲では、摩擦係数は緩慢に減少する。即ち、摩擦係数の最大値が静摩擦係数であり、摩擦係数が緩慢に変化するときの値が動摩擦係数である。そこで、駆動力制御では、例えばすべり速度が0.1〜0.2の範囲を基準範囲とし、補正すべり速度ΔVD がこの基準範囲内となるように駆動モータ19の駆動トルクを目標駆動トルクから制限する。このことにより、補正すべり速度ΔVD が、基準値である0.2を超えないように駆動モータ19の駆動トルクを制限する。
【0059】
又、コントローラ44は、車両の前進状態又は後進状態からのスイッチバック操作による駆動輪12での制動時に、駆動輪12のスリップを抑制して路面に対する制動力の低下を抑制するための駆動モータ19の制動力制御を行う。
【0060】
制動力制御として、コントローラ44は、各回転数センサ41a,41bから入力する検出信号から車両の走行方向を検出する。そして、コントローラ44は、車両が前進中にアクセルレバー23が後進側にスイッチバック操作されたとき、公知の回生制動によって駆動輪12を制動する。同様に、コントローラ44は、車両が後進中にアクセルレバー23が前進側にスイッチバック操作されたときにも回生制動によって駆動輪12を制動する。
【0061】
このとき、コントローラ44は、加速時に行う駆動力制御と同様に、前輪速度VLF,VRF及び後輪速度VD を求めるとともに、前輪速度VLF,VRFから換算後輪速度VDPを求める。さらに、コントローラ44は、すべり速度ΔVD さらに補正すべり速度ΔVDKを求める。そして、コントローラ44は、アクセルレバー23のスイッチバック操作によって駆動モータ19を回生制動するときに、求めた補正すべり速度ΔVDKが基準範囲内の値となるように駆動モータ19の制動トルクを目標制動トルクから制限する。
【0062】
次に、以上のように構成されたリーチフォークリフトの作用について説明する。
車両が停止状態のときにアクセルレバー23を中立位置から前進側に操作すると、コントローラ44はアクセル開度ACCに対応する目標駆動トルクまで駆動モータ19の駆動トルクを所定の増大量で徐々に増大させる。すると、リーチフォークリフト10が加速して前進する。
【0063】
このとき、駆動輪12の路面に対する駆動力が駆動輪重と路面との摩擦係数で決まる最大摩擦力を超えると、駆動輪12がスリップして駆動輪12の位置における実際の車速よりも後輪速度VD が大きくなる。後輪速度VD が増大して補正すべり速度ΔVDKが所定の基準値を超えると、コントローラ44は駆動モータ19の駆動トルクを目標駆動トルクよりも制限し、補正すべり速度ΔVDKを所定の基準値範囲内の値に制御する。従って、アクセルレバー23のアクセル開度ACC及び路面の状態に拘らず、駆動輪12のスリップが抑制され路面に対する駆動力の低下が抑制される。その結果、アクセル開度ACCが大き過ぎたり路面が滑り易い状態であっても、駆動輪12が無用にスリップすることなく車両が迅速に加速する。尚、車両が停止状態のときにアクセルレバー23を中立位置から後進側に操作した場合においても、同様にして、補正すべり速度ΔVDKが基準値を超えると、コントローラ44が駆動モータ19の駆動トルクを目標駆動トルクから制限する。
【0064】
又、車両が前進中にアクセルレバー23をスイッチバック操作すると、コントローラ44はアクセル開度ACCに対応する目標制動トルクとなるように駆動モータ19を運転制御する。すると、駆動輪12が制動されて車両が減速する。
【0065】
このとき、駆動輪12の路面に対する制動力が駆動輪重と路面との最大摩擦力を超えると、駆動輪12がスリップして駆動輪12の位置における実際の車速よりも後輪速度VD が小さくなる。後輪速度VD が減少して補正すべり速度ΔVDKの大きさが所定の基準値を超えると、コントローラ44が駆動モータ19の制動トルクを目標制動トルクよりも小さく制限する。そして、補正すべり速度ΔVDKの大きさが基準値範囲内となるように、駆動モータ19の制動トルクが制御される。従って、アクセル開度ACC及び路面の状態に拘らず、駆動輪12のスリップが抑制され路面に対する制動力の低下が抑制される。その結果、スイッチバックのためのアクセル開度ACCが大き過ぎたり路面が滑り易い状態であっても、駆動輪12が無用にスリップすることなく車両が迅速に減速する。尚、車両の後進中にアクセルレバー23を後進側から前進側にスイッチバック操作した場合においても、同様にして、補正すべり速度ΔVDPが基準値を下回ると、コントローラ44が駆動モータ19の制動トルクを目標制動トルクから制限する。
【0066】
又、車両が前進中又は後進中にスイッチバックによる制動が行われたとき、補正すべり速度ΔVDKの大きさが基準値を超えると、コントローラ44が各油圧ブレーキ16を作動させて前輪11L,11Rを制動する。その結果、車両が駆動輪12によって制動されるとともに左右前輪11L,11Rによっても制動される。
【0067】
車両を、左右いずれかの前輪11L,11Rを旋回中心として旋回させると、旋回外側の前輪11L,11Rの前輪速度VLF(VRF)から補正すべり速度ΔVDKが求められる。そして、駆動輪12がスリップして補正すべり速度ΔVDKが基準値を超えると、駆動モータ19の駆動トルクが目標駆動トルクから制限される。その結果、アクセル開度ACCや路面の状態に拘らず、駆動輪12のスリップが抑制される。従って、左右前輪11L,11Rのいずれかを旋回中心とする旋回時に駆動輪12がスリップしても、前輪11L,11Rを駆動することなくスリップが抑制され路面に対する駆動力の低下が抑制される。
【0068】
以上詳述した本実施の形態のリーチフォークリフトによれば、以下の各効果を得ることができる。
(1) 本実施形態では、旋回時に外側となる前輪11L(11R)の前輪回転数NLF(NRF)から前輪速度VLF(VRF)を求めるとともに、駆動輪12の後輪回転数ND から後輪速度VD を求めた。そして、前輪速度VLF(VRF)から求めた換算後輪速度VDPと後輪速度VD との速度差であるすべり速度ΔVD を求め、このすべり速度ΔVD から求めた補正すべり速度ΔVDKが所定の基準値範囲(即ち、路面の摩擦係数が大きな範囲となるすべり速度の範囲)内の値となるように車両の加速時に駆動モータ19の駆動トルクを目標駆動トルクから制限するようにした。
【0069】
従って、左右前輪11L,11Rのいずれかを旋回中心とする旋回時に駆動輪12がスリップしても、前輪11L,11Rを駆動することなくスリップが抑制され路面に対する駆動力の低下が抑制される。その結果、駆動操舵輪12の路面に対する駆動力又は制動力をより確実に確保することができ、しかも、左右前輪11L,11Rのいずれか一方を旋回中心とする旋回を円滑に行うことができる。
【0070】
又、旋回外側の前輪11L(11R)は旋回内側の前輪11R(11L)よりも前輪速度VLF(VRF)が大きくなる。従って、前輪速度VLF(VRF)がより高い精度で検出されるので、加速時又は制動時において駆動輪12のスリップをより一層確実に抑制して駆動力又は制動力をより一層確実に抑制することができる。
【0071】
(2) 加えて本実施形態では、スイッチバック操作に基づく回生制動時においても、補正すべり速度ΔVDKが基準値範囲内の値となるように駆動モータ19の制動トルクを目標制動トルクから制限するようにした。従って、アクセル開度ACC及び路面の状態に拘らず、駆動輪12のスリップが抑制され路面に対する制動力の低下が抑制される。その結果、左右の前輪11L,11Rを制動することなく駆動輪12の路面に対する制動力を確実に確保することができる。このため、アクセル開度ACC及び路面の状態に拘らず、車両を迅速に減速させることができるとともに駆動輪12の摩耗を抑制することができる。
【0072】
(3) 加えて本実施形態では、すべり速度ΔVD に操舵角θに応じた変換係数K2(θ)を乗じることで、操舵角θがより大きくなるにつれてより基準値を超え難いようにした換算した補正すべり速度ΔVDKに基づいて駆動モータ19の駆動トルク及び制動トルクを制限するようにした。従って、操舵角θが大きくなるにつれて換算後輪速度VDPの誤差が大きくなる場合であっても、駆動輪12がスリップしていないにも拘らず補正すべり速度ΔVDKが基準値を超えることがない。このため、車両の旋回時に駆動モータ19の駆動トルクが無用に制限されることがないので、操舵状態での加速時又は制動時にも車両を迅速に加速及び制動することができる。
【0073】
又、前輪回転数NLF,NRFの検出分解能が後輪回転数ND の検出分解能より低く車両の加速時に前輪速度VLF,VRFの検出遅れがある場合に、駆動輪12がスリップしていないにも拘らず補正すべり速度ΔVDKが基準値を超えることがない。その結果、停止状態又は低速状態からの車両の加速時に駆動モータ19の駆動トルクが無用に制限されることがなく、車両を迅速に加速させることができる。又、前輪速度VLF,VRF及び後輪速度VD の検出を、分解能は低いが信頼性が高い磁気抵抗素子、ホ−ル素子等の磁気センサを用いた回転検出装置で行うことができる。
【0074】
(4) 加えて本実施形態では、スイッチバックによる制動時に、駆動モータ19の制動トルクが制限されるときには各前輪11L,11Rの油圧ブレーキ16を作動させるようにした。従って、スイッチバックによる制動時には、車両が駆動輪12によって制動されるとともに左右前輪11L,11Rによっても制動されるので、滑り易い路面上であってもより短い制動距離で停止することができる。
【0075】
(第2の実施の形態)
次に、本発明を具体化した第2の実施の形態を図10〜図13に従って説明する。尚、本実施の形態は、前記第1の実施の形態において車両の加速時及び制動時にコントローラ44が行う駆動モータ19の駆動力及び制動力制御の内容を変更したことのみが第1の実施の形態と異なる。従って、第1の実施の形態と同じ構成については、符号を同じにしてその説明を省略し、駆動力制御及び制動力制御のみについて詳述する。
【0076】
駆動輪12の駆動力制御として、コントローラ44は、前記第1実施形態と同様に、直進時には左右前輪11L,11Rのいずれか一方、旋回時には外側となる前輪11L(11R)の回転数センサ45L(45R)が検出する前輪回転数NLF(NRF)から前輪速度VLF(VRF)を求める。又、各回転数センサ41a,41bが検出する後輪回転数ND から後輪速度VD を求める。さらに、前輪速度VLF(VRF)から換算後輪速度VDPを求める。
【0077】
本実施形態では、第1実施形態と異なり、コントローラ44は、後輪速度VD から換算後輪速度VDPを差し引いた速度差(VD −VDP)を後輪速度VD で除したスリップ率SLP(=(VD −VDP)/VD )を求める。
【0078】
そして、コントローラ44は、アクセルレバー23のアクセル開度ACCに基づいて駆動モータ19を運転制御するときに、スリップ率SLPが予め設定された基準値範囲内の値となるように駆動トルクを制御する。
【0079】
この理由は、スリップ率SLPは、車速に関係なく例えば0.1〜0.2の範囲で路面との摩擦係数が最も大きくなるからである。コントローラ44は、例えばスリップ率SLPが0.1〜0.2の範囲を基準範囲とし、スリップ率SLPがこの基準範囲内の値となるように駆動モータ19の駆動トルクを目標駆動トルクから制限する。このことにより、スリップ率SLPが、基準値である0.2を超えないように駆動モータ19の駆動トルクを制限する。
【0080】
又、コントローラ44は、駆動力制御として、前輪速度VLF,VRFの大きい方が予め設定された基準速度V0未満であるときには、その前輪速度VLF(VRF)の値を基準速度V0に置き換えて換算後輪速度VDPを求める。
【0081】
この理由を述べる。第1実施形態でも述べたように、回転数センサ45L,45Rによる前輪速度VLF(VRF)の検出分解能は、回転数センサ41a,41bによる後輪速度VD 検出分解能よりも低い。このため、停止状態又は低速状態から車両が加速するときのように低い車速域では、検出される前輪速度VLF(VRF)が後輪速度VD に対して遅れる状態が発生する。このため、低い車速域からの加速時には、駆動輪12がそれほどスリップしておらず路面に対する駆動力が低下しない状態であるにも拘らず、スリップ率SLPが基準値を超えることがある。すると、駆動モータ19の駆動トルクが制限され、車両を迅速に加速させることができなくなる。そこで、車両の加速時に、前輪速度VLF(VRF)の検出の遅れによって見かけ上のスリップ率SLPが基準値を超えてしまう可能性のある車速域の最大値を基準速度V0として設定し、この基準速度V0未満においては前輪速度VLF(VRF)の値を基準速度V0に置き換えてスリップ率SLPを求める。
【0082】
又、車両が走行中にアクセルレバー23がスイッチバック操作されたときに行う制動力制御として、コントローラ44は、加速時に行う駆動力制御の場合と同様に、後輪速度VD と換算後輪速度VDPとからスリップ率SLPを求める。そして、コントローラ44は、駆動モータ19を回生制動するときに、スリップ率SLPが基準範囲内の値となるように駆動モータ19の制動トルクを目標制動トルクから制限する。
【0083】
以上のように構成されたリーチフォークリフトにおいても、前記第1実施形態と同様に、車両の加速時における駆動操舵輪12のスリップが、スリップ率SLPに基づいて抑制され、駆動操舵輪12の路面に対する駆動力の低下が抑制される。又、車両の制動時における駆動操舵輪12のスリップが、スリップ率SLPに基づいて抑制され、駆動操舵輪12の路面に対する制動力の低下が抑制される。
【0084】
車両を発進させると、前輪車速VLF(VRF)が基準速度V0となるまでは、前輪速度VFL(VRF)の検出遅れによって見かけ上のスリップ率SLPが基準値を超える状態が発生する。ここで、前輪速度VLF(VRF)が基準速度V0以下では、前輪速度VLF(VRF)を基準速度V0に置き換えてスリップ率SLPが求められるので、駆動操舵輪12がそれほどスリップしていないにも拘らず駆動モータ19の駆動トルクが制限されることがない。以下、この効果を実験データで説明する。
【0085】
図10は、濡れた路面上で車両を発進させたときに、検出した前輪速度VLF(VRF)をそのまま用いて求めたスリップ率SLPと、スリップ率の実測値の時間に対する変化を示したグラフである。図10に示すように、発進直後には、前輪速度VLF,VRFの検出遅れによって見かけ上のスリップ率SLPが、スリップ率の実測値に対して大きく乖離する。従って、見かけ上のスリップ率SLPに基づいて駆動モータ19の駆動トルクを制限すると、駆動輪12がさほどスリップしておらず路面に対する駆動力が低下していない状態で駆動輪12の駆動力が制限される。その結果、車両が迅速に加速しなくなる。
【0086】
一方、図11は、同じ路面上で車両を発進させたときに、基準速度V0=0.1m/s以下の車速域では、前輪速度VLF(VRF)をV0=0.1m/sとして求めたスリップ率SLPと、スリップ率の実測値との時間に対する変化を示したグラフである。この場合には、図11に示すように、発進直後に、見かけ上のスリップ率SLPがスリップ率の実測値からそれほど大きく乖離しなくなっている。従って、適切なスリップ率SLPの値を基準値として駆動モータ19の駆動トルクを制限することにより、発進時に駆動モータ19の駆動トルクが無用に制限されないようにして、車両を迅速に加速することができる。
【0087】
又、図12は、乾いた路面上で車両を発進させたときに、検出した前輪速度VLF(VRF)をそのまま用いて求めたスリップ率SLPと、スリップ率の実測値の時間に対する変化を示したグラフである。図12に示すように、発進直後には、濡れた路面上での発進時と同様に、見かけ上のスリップ率SLPがスリップ率の実測値に対して大きく乖離する。従って、見かけ上のスリップ率SLPに基づいて駆動モータ19の駆動トルクを制限すると、駆動モータ19の駆動トルクが一旦制限されたことによって駆動輪12のスリップが抑制されたにも拘らず駆動トルクが制限され続ける。その結果、車両が迅速に加速しなくなる。
【0088】
一方、図13は、同じ路面上で車両を発進させたときに、基準速度V0=0.1m/s以下の車速域では、前輪速度VLF(VRF)をV0=0.1m/sとして求めたスリップ率SLPと、スリップ率の実測値との時間に対する変化を示したグラフである。この場合には、図13に示すように、発進直後に見かけ上のスリップ率SLPがスリップ率の実測値から殆ど乖離しなくなっている。従って、適切なスリップ率SLPの値を基準値として駆動モータ19の駆動トルクを制限することにより、発進時に駆動輪12がスリップしておらず駆動力が低下しない状態で駆動モータ19の駆動トルクが制限されないようにして車両を迅速に加速することができる。
【0089】
以上詳述した本実施の形態のリーチ型フォークリフトによれば、前記第1の実施の形態における(1),(2),(4)に記載の各効果の他に以下に記載の各効果を得ることができる。
【0090】
(1) 本実施形態では、車両の加速時に、前輪速度VLF(VRF)の検出分解能の低さによって検出が遅れるような所定の基準速度V0以下の車速域では、前輪速度VLF(VRF)の値を基準速度V0に置き換えてスリップ率SLPを求めるようにした。従って、停止状態又は低い車速からの車両の加速時に、前輪速度VLF(VRF)の検出が後輪速度VD の検出に対して遅れても、駆動輪12がスリップしていない状態でスリップ率SLPが基準値を超え難い。その結果、前輪速度VLF(VRF)の検出分解能が低い場合であっても、停止状態又は低い車速から車両を迅速に加速することができる。
【0091】
以下、上記実施形態以外の発明の実施形態を列挙する。
○ 上記第1実施形態では、変換係数K2(θ)を、操舵角θに応じて連続的に変化するように設定した。これを、図14に示すように、「0」から最大操舵角までの操舵角範囲を複数の操舵角範囲に区分し、その各操舵角範囲に対してそれぞれ一定の変換係数KA,KB,KCを設定してもよい。
【0092】
○ 上記第1実施形態では、操舵角θに応じて変換係数K2(θ)を設定するようにしたが、前輪速度VLF(VRF)がより小さいときほど、すべり速度ΔVD をより小さい補正すべり速度ΔVDKに変換する変換係数を設定してもよい。この場合には、前輪回転数NLF,NRFの検出が後輪速度VD の検出に対して遅れる場合であっても、低車速域からの車両の加速時に、駆動輪12がスリップしていないにも拘らず補正すべり速度ΔVDKが基準値を超えることがない。その結果、停止状態又は低速域からの加速時に、駆動モータ19の駆動トルクが無用に制限されることがなく、車両を迅速に加速させることができる。
【0093】
○ 上記第1実施形態では、直接には操舵角θのみに応じて変換係数K2(θ)を設定するようにしたが、これを、操舵角θ及び前輪速度VLF(VRF)に応じて設定するようにしてもよい。例えば、図15に示すように、全操舵角範囲で連続的に変化するとともに、その変化率(減少率)が前輪速度VLF(VRF)が低くなるほど大きくなる変換係数K3(θ,VLF(VRF))を設定する。この場合には、第1実施形態の(3)に記載の効果を得ることができる上に、滑り易い路面上で、操舵角θを大きくした状態で停止状態又は低速状態から加速しようとするときに、駆動輪12がスリップして路面に対する駆動力が低下する状態であるにも拘らず、駆動モータ19の駆動トルクが制限されないという状態が起き難い。その結果、滑り易い路面上で操舵した状態から加速するときに、駆動輪12の路面に対する駆動力を確実に確保することができる。
【0094】
○ 上記第1実施形態では、補正すべり速度ΔVDKの基準値を固定値としたが、前輪速度VFL,VRFに応じて変化させてもよい。
同様に、第2実施形態で、スリップ率SLPの基準値を、前輪速度VFL,VRFに応じて変化させてもよい。
【0095】
○ 上記第2の実施形態では、基準速度V0を固定値としたが、作業する路面の状況に応じてオペレータ等が、基準速度V0を適宜設定するようにしてもよい。この場合には、路面の状況に応じてより確実に、駆動輪12がスリップしていない状態で駆動トルクが制限されないようにするとともにスリップする状態で駆動トルクを制限することができる。
【0096】
○ 上記各実施形態では、駆動モータ19を交流誘導モータとしたが、直流モータとしてもよい。この場合には、車両の加速時に、補正すべり速度ΔVDK又はスリップ率SLPが基準値範囲内となるように平均駆動電圧を制御することで、駆動モータ19の駆動トルクを制限すればよい。又、車両の制動時に、平均回生時間を制御することで制動トルクを制限すればよい。
【0097】
○ 上記各実施形態では、リーチフォークリフトの駆動制御装置に実施したが、その他、例えば前輪が駆動操舵輪とされ、後輪が左右一対の従動輪とされた産業車両の駆動制御装置に実施してもよい。
【0098】
以下、前述した各実施形態から把握される技術的思想をその効果とともに記載する。
(1) 左右一対の従動輪が駆動されない産業車両において、前記産業車両の駆動制御装置を備えた。
【0099】
(2) 前記従動輪速度の検出分解能は、前記駆動輪速度の検出分解能よりも低い。このような構成によれば、従動輪速度及び駆動力速度を、ホール素子、磁気抵抗素子等からなる磁気センサを使用して検出することができるので、ロータリエンコーダ等の回転変位センサを使用する場合に比較して、取付スペースが小さくてすみ、又、コストを抑えることができる。
【0100】
【発明の効果】
各請求項に記載の発明によれば、駆動操舵輪の路面に対する駆動力又は制動力をより確実に確保することができる。しかも、左右の従動輪のいずれかを旋回中心とする車両の旋回時に駆動操舵輪がスリップしても従動輪を駆動することなくスリップが抑制されるので、左右従動輪のいずれか一方を旋回中心とする旋回を円滑に行うことができる。
【図面の簡単な説明】
【図1】 第1実施形態のリーチフォークリフトの駆動制御装置を示すブロック図。
【図2】 リーチフォークリフトの概略側面図。
【図3】 同じく概略平面図。
【図4】 右旋回状態での前輪及び駆動輪の関係を示す平面図。
【図5】 左旋回状態での前輪及び駆動輪の関係を示す平面図。
【図6】 変換係数−操舵角の関係を示すグラフ。
【図7】 変換係数−操舵角の関係を示すグラフ。
【図8】 車速−時間の関係を示すグラフ。
【図9】 摩擦係数−すべり速度の特性を示すグラフ。
【図10】 第2実施形態のスリップ率−時間特性を示すグラフ。
【図11】 スリップ率−時間特性を示すグラフ。
【図12】 スリップ率−時間特性を示すグラフ。
【図13】 スリップ率−時間特性を示すグラフ。
【図14】 その他の実施形態における変換係数−操舵角の関係を示すグラフ。
【図15】 同じく変換係数−操舵角の関係を示すグラフ。
【符号の説明】
10…産業車両としてのリーチ型フォークリフトトラック、11L,11R…従動輪としての前輪、12…駆動操舵輪、23…駆動力調整操作手段としてのアクセルレバー、41a,41b…駆動輪速度検出手段を構成する回転数センサ、44…駆動輪速度検出手段、従動輪速度検出手段を構成するトルク制御手段としてのコントローラ、45L,45R…従動輪速度検出手段を構成する回転数センサ、ACC…操作量としてのアクセル開度、ND …駆動輪回転数としての後輪回転数、NLF,NRF…従動輪回転数としての前輪回転数、SLP…スリップ率、V0…基準速度、VD …駆動輪速度としての後輪速度、VDP…換算駆動輪速度としての換算後輪速度、VLF,VRF…従動輪速度としての前輪速度、ΔVD …すべり速度、ΔVDK…補正すべり速度。
Claims (2)
- 左右一対の従動輪と共に産業車両の前後輪を構成する駆動操舵輪を駆動する駆動モータの駆動トルク又は制動トルクを、運転者が操作する駆動力調整操作手段の操作量に基づいて制御する産業車両の駆動制御装置において、
車両の旋回時には旋回外側となる前記従動輪の回転数から求めた従動輪速度を前記駆動操舵輪の速度に換算した換算駆動輪速度と、前記駆動操舵輪の回転数から求めた駆動輪速度とに基づいて該駆動操舵輪のスリップを検出し、該駆動操舵輪のスリップによって路面に対する駆動力又は制動力が低下しないようにするべく、前記駆動力調整操作手段の操作量に対する前記駆動モータの駆動トルク又は制動トルクを、前記駆動輪速度と前記換算駆動輪速度との速度差であるすべり速度が予め設定された基準値を超えないように制限し、
前記駆動操舵輪の操舵角がより大きな値であるときには、前記基準値をより超え難いように前記すべり速度を変換した補正すべり速度が該基準値を超えないように前記駆動モータの駆動トルク又は制動トルクを制限することを特徴とする産業車両の駆動制御装置。 - 請求項1に記載の産業車両の駆動制御装置において、
前記駆動モータによる回生制動時に、前記駆動力調整操作手段の操作量に対する前記駆動モータの制動力を制限するときに、前記従動輪に設けられたブレーキ装置を制御して該従動輪を制動することを特徴とする産業車両の駆動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000207898A JP3777954B2 (ja) | 2000-07-10 | 2000-07-10 | 産業車両の駆動制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000207898A JP3777954B2 (ja) | 2000-07-10 | 2000-07-10 | 産業車両の駆動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002020097A JP2002020097A (ja) | 2002-01-23 |
| JP3777954B2 true JP3777954B2 (ja) | 2006-05-24 |
Family
ID=18704583
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000207898A Expired - Fee Related JP3777954B2 (ja) | 2000-07-10 | 2000-07-10 | 産業車両の駆動制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3777954B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100579925B1 (ko) | 2004-06-29 | 2006-05-15 | 현대자동차주식회사 | 4륜 하이브리드 전기자동차의 슬립 제어장치 및 방법 |
| EP2181877B1 (en) * | 2008-10-31 | 2012-12-19 | BT Products AB | Industrial truck comprising a system for detecting spinning or locking of the drive wheel |
| JP5669150B2 (ja) * | 2013-04-24 | 2015-02-12 | ニチユ三菱フォークリフト株式会社 | フォークリフト |
| JP6282082B2 (ja) * | 2013-11-05 | 2018-02-21 | 住友重機械工業株式会社 | フォークリフト用のモータ駆動装置およびそれを用いた電動フォークリフト |
| CN108544983B (zh) * | 2018-03-26 | 2019-05-24 | 深圳市高德威技术有限公司 | 电动叉车油门开度处理方法 |
-
2000
- 2000-07-10 JP JP2000207898A patent/JP3777954B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002020097A (ja) | 2002-01-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4062085B2 (ja) | 電気式産業車両の操舵装置 | |
| JPH08182119A (ja) | 電気自動車用走行用モータの制御方法 | |
| CN104139777B (zh) | 车辆行驶控制装置和方法 | |
| JP3536785B2 (ja) | 産業車両の走行制御装置 | |
| JP3777954B2 (ja) | 産業車両の駆動制御装置 | |
| JP3780827B2 (ja) | 産業車両の走行制御装置 | |
| JPH09233604A (ja) | ブレ−キング制御装置 | |
| JP4141314B2 (ja) | 全方向操舵式フォークリフトの走行規制装置 | |
| JP3596439B2 (ja) | 産業車両の走行制御装置 | |
| JP3876605B2 (ja) | 産業車両におけるブレーキ制御装置 | |
| JP3460682B2 (ja) | 産業車両の制動制御装置 | |
| JP2630176B2 (ja) | リーチ式フォークリフトの発進時における荷役制御装置 | |
| JP3422314B2 (ja) | 産業車両の走行制御装置 | |
| JP3826259B2 (ja) | 産業車両のブレーキ制御装置 | |
| JP3736307B2 (ja) | 産業車両のブレーキ制御装置 | |
| JP3826262B2 (ja) | 産業車両のブレーキ制御装置 | |
| JP2003054892A (ja) | リーチ型フォークリフトの制御装置 | |
| JP3460681B2 (ja) | 産業車両におけるブレーキ制御装置 | |
| JP2003054891A (ja) | リーチ型フォークリフトの制動制御装置 | |
| JPH08265916A (ja) | リーチ式フォークリフトの駆動制御装置 | |
| JP3678123B2 (ja) | 産業車両のサスペンション制御装置 | |
| JPH1141716A (ja) | リーチフォークリフト | |
| JP4056297B2 (ja) | 電動搬送車の走行動力制御装置 | |
| JP3705078B2 (ja) | 産業車両の車体制御装置 | |
| JP2003182997A (ja) | リーチ型フォークリフト |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051004 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060207 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060220 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 3777954 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120310 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130310 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |