JP3687331B2 - 誘導機可変速駆動装置 - Google Patents
誘導機可変速駆動装置 Download PDFInfo
- Publication number
- JP3687331B2 JP3687331B2 JP06533798A JP6533798A JP3687331B2 JP 3687331 B2 JP3687331 B2 JP 3687331B2 JP 06533798 A JP06533798 A JP 06533798A JP 6533798 A JP6533798 A JP 6533798A JP 3687331 B2 JP3687331 B2 JP 3687331B2
- Authority
- JP
- Japan
- Prior art keywords
- induction machine
- calculation
- rotation speed
- current
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Control Of Ac Motors In General (AREA)
- Control Of Multiple Motors (AREA)
Description
【発明の属する技術分野】
本発明は、ベクトル制御により誘導機を駆動するための誘導機可変速駆動装置に関する。
【0002】
【従来の技術】
一般に、インバータを使用する可変周波数電源によって誘導電動機を速度制御する方式は、可変速電動機を必要とする分野に広く用いられている。特に、直流電動機と同等の特性を持っている上に、保守が容易であって超高速回転にも向いており、1台のインバータを用いて複数台の並列接続された誘導電動機を同時運転することも行われている。そして、誘導電動機の速度を正確に制御するために、ベクトル制御による誘導機可変速駆動装置も、使用されるようになってきている。
【0003】
このような装置においては、誘導機の速度制御のために、その回転速度を検出する必要がある。
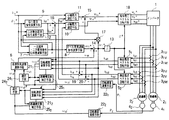
図9は、本出願人による特願平9−201709号に示された誘導機可変速駆動装置である。図において、1台のインバータ1により並列運転される複数の誘導機21,22,……,2Nの回転速度は、パルス発生器41,42,……,4Nを使用して検出される。パルス発生器41,42,……,4Nは、各誘導機21,22,……,2Nの回転速度に比例した周波数のパルス信号P1,P2,……,PNを回転速度演算手段221,222,……,22Nに出力する。
【0004】
回転速度演算手段221,222,……,22Nは、所定時間内に入力されるパルスのカウント値から回転速度を演算し、回転速度演算値ωr1',ωr2',……,ωrN'を出力する。この回転速度演算値ωr1',ωr2',……,ωrN'は、所定時間おきに更新されるようになっている。入力パルスをカウントする所定時間は、電動機の低速運転時にも十分なパルス数を得ることができるような時間に設定されている。このような構成とすることにより、広い速度範囲について、精度の高い回転速度演算値を得るようにしている。
【0005】
なお、図9において、3U,3V,3Wは電流検出器、5は検出電流ベクトル回転手段、6は基準角周波数演算手段、7は一次磁束・二次電流指令位相差演算手段、8はすべり角周波数指令演算手段、9は磁化電流指令演算手段、10はd軸電流調節手段、11はq軸電流調節手段、12は二次無効電流指令演算手段、13は積分手段、14,15,16は加算手段、17は乗算手段、18は指令電圧ベクトル回転手段である。これらの動作については本発明の実施形態において説明する。
【0006】
【発明が解決しようとする課題】
しかし、上述したようなパルス信号に基づいて回転速度演算値を得る方法においては、入力パルスをカウントする所定時間を比較的長く設定しているために、回転速度の演算頻度が少なくなっている。従って、速度演算と速度演算との合間にたとえば負荷の急激な変動により回転速度が急変した場合、これを検出することができず、速度制御を迅速に応答させることができないという問題があった。
【0007】
そこで本発明は、回転速度の演算を高頻度で行い、回転速度の急変にも迅速に対応することが可能な誘導機可変速駆動装置を提供しようとするものである。
【0008】
【課題を解決するための手段】
上述した従来技術の課題を解決するために、請求項1に記載した発明は、インバータと、このインバータの出力により駆動される誘導機と、一次磁束指令ベクトルの向きを基準としてベクトル制御を行うベクトル制御手段と、前記誘導機の一次電流を検出する電流検出器と、前記電流検出器による検出電流を前記一次磁束指令ベクトルと平行なd軸成分とこれに直交するq軸成分とに分解する検出電流ベクトル回転手段と、前記ベクトル制御に使用するために、前記検出電流のd軸成分及びq軸成分、一次角周波数指令値、磁化電流及び誘導機定数を用いて、誘導機の回転速度を演算する第1の回転速度演算手段とを備えたものである。
【0009】
本発明は、一次磁束を基準として誘導機のベクトル制御を行う場合、誘導機の二次電流ベクトルの向きがすべりに依存することに着目してなされたものである。
本発明において使用される回転子角周波数(回転速度)ωrの演算式は、以下に述べるようにして導かれる。
【0010】
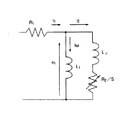
図5は、1台の誘導機についてのL形等価回路を示す。R1は一次抵抗、R2は二次抵抗、L1は一次インダクタンス、Lσは二次漏れインダクタンス、sはすべり、i1は一次電流、i2は二次電流、iMは磁化電流、e1は誘起電圧である。図5の等価回路から、二次電流i2は数式1によって表すことができる。
【0011】
【数1】
数式1において、ω1はインバータ角周波数(一次角周波数)、ωsはすべり角周波数である。ここで、二次電流i2と誘起電圧e1との位相差βは、数式1から導かれ、数式2で表される。
【0013】
【数2】
図6は、図5の等価回路に示された電流を磁化電流iMを基準として表したベクトル図である。ここで、d軸は磁化電流iMの方向、すなわち一次磁束の方向であり、q軸は磁化電流iMと直交する方向、すなわち誘起電圧e1の方向である。角度αは、二次電流の有効成分と無効成分とがなす角度、すなわち二次電流のd軸成分i2dとq軸成分i2qとがなす角度であり、数式3によって表される。
【0015】
【数3】
数式3において、i1dは一次電流のd軸成分、i1qは一次電流のq軸成分である。なお、数式3及び図6のベクトル図から明らかなように、i2q=i1q,i2d=i1d-iMの関係がある。角度α,βの和は常に90°となるので、すべり角周波数ωsは数式2及び数式3から導かれ、数式4で表される。
【0017】
【数4】
なお、回転子角周波数(回転速度)ωr、すべり角周波数ωs及び一次角周波数ω1の間には、ωr=ω1-ωsの関係がある。また、磁化電流iMは、d軸電流調節動作によって磁化電流指令値iM *と一致するように制御されるので、iM=iM *と考えて良い。従って、回転子角周波数(回転速度)ωrは、数式5により表される。
【0019】
【数5】
そこで、誘導機の一次電流i1を電流検出器により検出し、これをd軸成分及びq軸成分に分解してi1d,i1qを得れば、回転子角周波数(回転速度)ωrを数式5から演算により得ることができる。電流検出器による電流検出及びその他の演算は、ほとんど瞬時に行うことができるので、この発明によれば、誘導機の回転速度を高頻度で得ることができる。
また、パルス信号のカウントによる回転速度演算と異なり、検出誘導機電流検出の精度は、誘導機の回転速度の高低と無関係に、高頻度で行うことができる。
【0021】
また、この発明を、並列接続された複数の誘導機を1台のインバータにより並列運転する誘導機可変速駆動装置に適用する場合にも、電流検出器を各誘導機ごとに設けてその一次電流を検出し、前記数式5の演算を誘導機ごとに行うことにより、各誘導機の回転速度を得ることができる。
【0022】
更に、請求項2に記載した発明は、誘導機電流に基づいて回転速度を演算する手段に加えて、パルス信号に基づく回転速度演算手段を備えたものである。
誘導機電流から回転速度を演算する手段から得られる演算値は、パルス信号に基づく回転速度演算手段により得られる演算値よりも精度が低いという欠点があるが、この発明によれば、この欠点を補うことができる。すなわち、誘導機電流に基づく回転速度演算手段及びパルス信号に基づく回転速度演算手段の両者を備えることにより、それぞれが有する利点を生かすことができ、高頻度かつ高精度に回転速度演算を行うことができる。
【0023】
請求項3に記載した発明は、パルス信号からの回転速度演算値が基準値以下の場合に、誘導機電流からの回転速度演算値をベクトル制御に使用し、基準値を超える場合に、パルス信号からの回転速度演算値をベクトル制御に使用するための選択手段を備えたものである。
この発明では、誘導機の低速域において誘導機電流に基づく回転速度演算を行うようにしたので、中・高速域でのパルス信号に基づく演算頻度を高く設定することが可能となる。パルス信号に基づく演算頻度を高く設定したとしても、パルス信号の周波数が高い回転速度領域では、演算の精度を確保するために十分なパルス数を得ることができる。したがって、この発明によれば、低速域から高速域まで高頻度の回転速度演算を行うことができ、特に中・高速域での高精度の演算が実現可能である。
【0024】
請求項4に記載した発明は、誘導機電流に基づく回転速度演算の頻度をパルス信号に基づく回転速度演算の頻度よりも高く設定しておき、パルス信号に基づく回転速度演算値が更新される時点では、これを使用し、それ以外の時点では、誘導機電流に基づく回転速度演算値を使用するための選択手段を備えたものである。
すなわち、パルス信号に基づく回転速度演算の合間を、誘導機電流に基づく回転速度演算の演算値により補間する。このようにすることにより、定常的に、パルス信号に基づく高精度の回転速度を得ることができ、回転速度の急変は、誘導機電流に基づく回転速度演算によって瞬時に検出可能となる。
【0025】
請求項5に記載した発明は、誘導機電流に基づく回転速度の演算結果が、パルス信号に基づく回転速度の演算結果と一致するように、誘導機電流に基づく回転速度演算に使用する誘導機定数を補正する手段を備えたものである。これにより、高頻度かつ高精度の回転速度演算を実現することができる。
【0026】
【発明の実施の形態】
以下、本発明の実施形態を図に沿って説明する。
まず、本発明の第1実施形態による誘導機可変速駆動装置の構成を図1を参照しながら説明する。この実施形態は、1台のインバータ1によって2台の誘導機21,22を並列運転する例を示している。なお、図9と同一の構成要素には同一符号を付してある。
【0027】
図1において、磁化電流指令演算手段9は、入力される一次磁束指令値φ1 *から、数式6に従って磁化電流指令値iM *を演算する。この数式6において、L1は誘導機1台あたりの一次インダクタンス、Nは並列運転される誘導機の台数である。
【0028】
【数6】
一次磁束・二次電流指令位相差演算手段7は、入力されるトルク電流指令値(q軸電流指令値)i1q *、一次磁束指令値φ1 *から、数式7に従って位相差αを演算する。この数式7において、Lσは誘導機1台あたりの二次漏れインダクタンス値である。
【0030】
【数7】
すべり角周波数指令演算手段8には、一次磁束・二次電流指令位相差演算手段7から位相差αが入力されており、数式8に従ってすべり角周波数指令値ωs *を演算する。この数式8において、R2は誘導機1台あたりの二次抵抗値である。
【0032】
【数8】
二次無効電流指令演算手段12には、トルク電流指令値i1q *と一次磁束・二次電流指令位相差演算手段7からの位相差αが入力されており、数式9に従って二次無効電流指令値i2d *を演算する。
【0034】
【数9】
加算手段16は、磁化電流指令値iM *と二次無効電流指令値i2d *とを加算し、d軸電流指令値i1d *を算出する。加算手段14は、すべり角周波数指令演算手段8からのすべり角周波数指令値ωs *と基準角周波数演算手段6からの基準角周波数ωRとを加算することにより、インバータ1の角周波数指令値(一次角周波数指令値)ω1 *を算出する。積分手段13は、一次角周波数指令値ω1 *を積分して位相指令値θ*を算出する。
【0036】
誘導機21,22に対応して設けられた電流検出器31U,31V,31W及び32U,32V,32Wは、それぞれ誘導機21,22の一次電流を検出する。検出電流ベクトル回転手段51,52は、積分手段13からの位相指令値θ*と電流検出器31U,31V,31W及び32U,32V,32Wからの検出電流i1U,i1V,i1W及びi2U,i2V,i2Wとを入力して、数式10に従って三相二相変換を行う。
【0037】
【数10】
上記変換の結果、検出電流ベクトル回転手段51,52は、一次電流のd軸成分及びq軸成分を、それぞれi1d1,i1q1及びi1d2,i1q2として出力する。
【0039】
加算手段19は、検出電流ベクトル回転手段51,52からの一次電流のd軸成分i1d1,i1d2を加算して、一次電流のd軸成分の総和i1dを得る。同様にして加算手段20は、検出電流ベクトル回転手段51,52からの一次電流のq軸成分i1q1,i1q2を加算して、一次電流のq軸成分の総和i1qを得る。
【0040】
d軸電流調節手段10には、d軸電流指令値i1d *とd軸電流総和i1dとが入力され、d軸電流総和i1dをd軸電流指令値i1d *に一致させる調節動作を行い、d軸電圧指令値v1d *を出力する。同様にしてq軸電流調節手段11には、q軸電流指令値i1q *とq軸電流総和i1qとが入力され、q軸電流総和i1qをq軸電流指令値i1q *に一致させる調節動作を行う。
【0041】
乗算手段17は、加算手段14から得られた 一次角周波数指令値ω1 *と一次磁束指令値φ1 *とを乗算して出力する。加算手段15は、乗算手段17の出力とq軸電流調節手段11の出力とを加算し、q軸電圧指令値v1q *を算出する。指令電圧ベクトル回転手段18は、q軸電圧指令値v1q *、d軸電圧指令値v1d *、位相指令値θ*から、三相電圧指令値VU *,VV *,VW *を数式11に従って演算し、インバータ1に与える。
【0042】
【数11】
【0043】
回転速度演算手段211,212は、前述の数式5に従い、誘導機21,22の一次電流から、それぞれの回転角周波数(回転速度)ωr1 #,ωr2 #を演算し、基準角周波数演算手段6に出力する。基準角周波数演算手段6は回転角周波数ωr1 #,ωr2 #に基づき、力行時は速度が最も遅い誘導機の回転子角周波数を、回生時は、得度が最も速い誘導機の回転子角周波数を、基準角周波数ωRとして出力する。
回転速度演算手段211には、検出電流ベクトル回転手段51からの一次電流のd軸成分i1d1及びq軸成分i1q1、加算手段14からの一次角周波数指令値ω1 *、磁化電流指令値iM *が入力される。
一方、回転速度演算手段212には、検出電流ベクトル回転手段52からの一次電流のd軸成分i1d2及びq軸成分i1q2、加算手段14からの一次角周波数指令値ω1 *、磁化電流指令値iM *が入力される。また、回転速度演算手段211,212には、数式5における誘導機定数R2/Lσが設定されている。
【0044】
このように構成された誘導機可変速駆動装置において、回転速度は、前記数式5に従って誘導機電流に基づいて演算される。そして、その演算のために必要な電流検出器31,32による電流検出、及び検出電流ベクトル回転手段51,52によるベクトル演算などは、誘導機の回転速度と無関係に、高頻度で行うことができる。したがって、パルス発生器が出力するパルス信号から回転速度を演算する従来の方式に比べて演算頻度を高くすることができるので、回転速度の急変を瞬時に検出し、誘導機を応答性良く駆動することが可能となる。
【0045】
この第1実施形態では、1台のインバータ1で2台の誘導機21,22を駆動する場合を説明したが、より多くの誘導機(並列接続したN台の誘導機)を駆動する場合にも、本発明が適用できることは言うまでもない。
並列接続されたN台の誘導機をL形等価回路で示すと、図7のようになる。この図7において、R11,R12,R1Nは一次抵抗、R21,R22,R2Nは二次抵抗、L11,L12,L1Nは一次インダクタンス、Lσ1,Lσ2,LσNは二次漏れインダクタンス、s1,s2,sNはすべり、i11,i12,i1Nは一次電流、i21,i22,i2Nは二次電流、iM1,iM2,iMNは磁化電流である。
【0046】
各誘導機間で、一次抵抗R11,R12,R1N、一次インダクタンスL11,L12,L1Nにほとんど差がないと仮定すると、全誘導機の磁化電流を常に指令値と一致させることができる。すなわち、各誘導機ごとの電流を電流検出器で検出し、数式5の演算を各誘導機ごとに行うことで、各誘導機の回転速度を得ることができる。
【0047】
次に、本発明の第2実施形態について、図2を参照しつつ説明する。図2において、図1と共通する構成要素については、重複を避けるために説明を省略する。
図2において、パルス発生器41,42は、それぞれ誘導機21,22の回転子に結合されており、その回転速度に比例する周波数のパルス信号P1,P2を出力する。回転速度演算手段221,222は、入力されたパルス信号P1,P2に基づき、回転速度演算値ωr1',ωr2'を出力する。
【0048】
選択手段231には、回転速度演算値ωr1'及び回転速度演算手段211からの回転速度演算値ωr1 #が入力される。また、選択手段232には、回転速度演算値ωr2'及び回転速度演算手段212からの回転速度演算値ωr2 #が入力される。そして、これらの選択手段231,232は、回転速度演算手段221,222による回転速度演算値ωr1',ωr2'のいずれかが基準値以下の場合には、回転速度演算手段211,212の出力を選択し、その他の場合には回転速度演算手段221,222の出力を選択する。
【0049】
図2に示す装置では、回転速度演算手段211,212での誘導機電流に基づく回転速度演算と、回転速度演算手段221,222でのパルス信号に基づく回転速度演算とが行われるようになっているが、これら2種類の回転速度演算には、それぞれ一長一短がある。すなわち、演算頻度の点では、誘導機電流に基づく回転速度演算は、パルス信号に基づく回転速度演算の場合のような制約を受けることなく演算頻度を高くでき、回転速度の急変に対する応答性に優れている。一方、演算値の精度の点では、パルス信号に基づく回転速度演算の方が高精度と言える。
【0050】
回転速度演算手段221,222における速度演算は、パルス発生器41,42の出力を所定期間カウントして回転速度を得ているので、誘導機21,22の回転速度をほぼ直接的に検出していることになり、その演算値の誤差は非常に小さい。一方、回転速度演算手段211,212からの回転速度演算値は、数式5の演算によるものであり、式中の誘導機定数R2/Lσの設定に起因する誤差を含むことになる。
【0051】
このような構成においては、パルス発生器41,42が出力するパルス信号P1,P2の周波数が比較的高い領域でのみ、回転速度演算手段221,222での回転速度演算値ωr1',ωr2'を制御に使用することになる。したがって、回転速度演算手段221,222の演算頻度を上げることが可能となり、中・高速域において、高精度かつ高頻度の回転速度演算が可能となる。また、低速域においては、誘導機電流に基づく回転速度演算により、高頻度の演算が可能である。
【0052】
この第2実施形態では、第1実施形態における高頻度の回転速度演算が可能になるという効果に加えて、中・高速域における高精度の回転速度演算が可能になる。また、パルス発生器41,42のいずれか一方が故障して、対応する回転速度演算手段211,または212からの回転速度演算値が常時ゼロとなった場合でも、回転速度演算手段221,222の出力が選択されて回転速度演算値ωr1 #,ωr2 #による制御が行われ、運転継続が可能となる。
【0053】
次に、本発明の第3実施形態を、図3を参照して説明する。図3において、図2の実施形態と異なる点は、図2における選択手段231,232の代わりに、別の機能を有する選択手段241,242を設けたことである。
選択手段241には、回転速度演算値ωr1'及び回転速度演算手段211からの回転速度演算値ωr1 #が入力される。また、選択手段242には、回転速度演算値ωr2'及び回転速度演算手段212からの回転速度演算値ωr2 #が入力される。これらの選択手段241,242は、パルス信号に基づく回転速度演算値ωr1',ωr2'が更新される瞬間は、回転速度演算手段221,222の出力を選択し、それ以外の時は、回転速度演算手段211,212からの出力を選択するようになっている。
【0054】
このように構成したことにより、所定時間ごとに、パルス信号に基づく回転速度演算値が選択手段241,242により選択される。これは、精度の高い演算値である。一方、回転速度演算手段211,212による誘導機電流に基づく回転速度演算は高頻度で行うようにしており、パルス信号に基づく回転速度演算値を得ることができない演算の合間においても、その演算結果が出力されている。この演算の合間においては、誘導機電流に基づく回転速度演算値が選択手段241,242により選択されることになる。
【0055】
本実施形態では、定常的には、高頻度ではないが高精度のパルス信号に基づく回転速度演算による演算値を制御に利用でき、その合間を誘導機電流に基づく回転速度演算によって補間することにより、回転速度の急変を瞬時に検知することができる。
【0056】
次に、本発明の第4実施形態を、図4を参照して説明する。この実施形態は、図3に示した装置に対して誘導機定数補正手段251,252が追加されている。
誘導機定数補正手段251には、回転速度演算手段221の出力ωr1'及び回転速度演算手段211の出力ωr1 #が入力されており、補正された誘導機定数を回転速度演算手段211に与えるように構成されている。同様に、誘導機定数補正手段252には、回転速度演算手段222の出力ωr2'及び回転速度演算手段212の出力ωr2 #が入力されており、補正された誘導機定数を回転速度演算手段212に与えるように構成されている。
【0057】
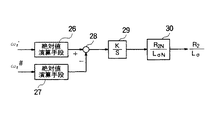
誘導機定数補正手段251,252は、例えば図8に示すように構成されている。
すなわち、図8において、絶対値演算手段26は、入力されるωr'の絶対値を出力し、絶対値演算手段27は、入力されるωr #の絶対値を出力する。減算手段28は、これら2つの絶対値の差を出力し、積分調節手段29は、この差を積分し、ゲイン倍(K倍)した値を積分調節演算結果として出力する。ゲイン手段30は、前記の積分調節演算結果を二次抵抗設定値と漏れインダクタンス設定値との比(R2N/LσN)に乗じることで、誘導機定数、すなわち二次抵抗値と漏れインダクタンス値との比(R2/Lσ)の補正値を得る。図中、Kは制御ゲイン、sはラプラス演算子である。
【0058】
このような構成とすることにより、回転速度演算手段222の出力ωr2'及び回転速度演算手段212の出力ωr2 #を一致させることができる。すなわち、誤差を含む可能性のある誘導機電流に基づく演算結果ωr1 #,ωr2 #を、精度の高い演算結果ωr1',ωr2'に一致させることができる。したがって、誘導機電流に基づく回転速度演算の精度を向上させることができるので、高頻度かつ高精度の回転速度演算を行うことができる。
【0059】
【発明の効果】
以上述べたように本発明によれば、回転速度の演算値を高頻度で得ることができる誘導機可変速駆動装置を提供することができる。このような誘導機可変速駆動装置を使用することにより、誘導機の回転速度の急変にも迅速に応答する制御を行うことが可能である。
また、パルス信号に基づく回転速度演算と組み合わせることにより、回転速度の演算値を高頻度かつ高精度に得ることができる。
【図面の簡単な説明】
【図1】本発明の第1実施形態を示すブロック図である。
【図2】本発明の第2実施形態を示すブロック図である。
【図3】本発明の第3実施形態を示すブロック図である。
【図4】本発明の第4実施形態を示すブロック図である。
【図5】誘導機1台についての等価回路を示す図である。
【図6】図5に示した電流に関するベクトル図である。
【図7】複数台の誘導機についての等価回路を示す図である。
【図8】図4における誘導機定数補正手段の構成を示す図である。
【図9】従来技術の一例を示すブロック図である。
【符号の説明】
1 インバータ
2 誘導機
3 電流検出器
4 パルス発生器
5 検出電流ベクトル回転手段
6 基準角周波数演算手段
7 一次磁束・二次電流指令位相差演算手段
8 すべり角周波数指令演算手段
9 磁化電流指令演算手段
10 d軸電流調節手段
11 q軸電流調節手段
12 二次無効電流指令演算手段
13 積分手段
14〜16,19,20 加算手段
17 乗算手段
18 指令電圧ベクトル回転手段
21,22 回転速度演算手段
23,24 選択手段
25 誘導機定数補正手段
26,27 絶対値演算手段
28 減算手段
29 積分調節手段
30 ゲイン手段
Claims (5)
- インバータと、
このインバータにより駆動される誘導機と、
一次磁束指令ベクトルの向きを基準としてベクトル制御を行うベクトル制御手段と、
前記誘導機の一次電流を検出する電流検出器と、
前記電流検出器による検出電流を前記一次磁束指令ベクトルと平行なd軸成分とこれに直交するq軸成分とに分解する検出電流ベクトル回転手段と、
前記ベクトル制御に使用するために、前記検出電流のd軸成分及びq軸成分、一次角周波数指令値、磁化電流及び誘導機定数を用いて、誘導機の回転速度を演算する第1の回転速度演算手段と、
を備えたことを特徴とする誘導機可変速駆動装置。 - 請求項1記載の誘導機可変速駆動装置において、
前記誘導機の回転速度に比例する周波数のパルスを出力するパルス発生器と、
前記ベクトル制御に使用するために、このパルス発生器からのパルスを所定時間カウントすることにより誘導機の回転速度を演算する第2の回転速度演算手段と、
を備えたことを特徴とする誘導機可変速駆動装置。 - 請求項2記載の誘導機可変速駆動装置において、
前記第2の回転速度演算手段による演算値が基準値以下である場合に、前記第1の回転速度演算手段による演算値を前記ベクトル制御手段に与える選択手段を備えたことを特徴とする誘導機可変速駆動装置。 - 請求項2記載の誘導機可変速駆動装置において、
前記第1の回転速度演算手段による演算頻度を前記第2の回転速度演算手段による演算頻度よりも高くし、前記第2の回転速度演算手段による演算と演算との合間を前記第1の回転速度演算手段による演算結果で補間することを特徴とする誘導機可変速駆動装置。 - 請求項2記載の誘導機可変速駆動装置において、
前記第1の回転速度演算手段による演算結果が前記第2の回転速度演算手段による演算結果と一致するように、前記第1の回転速度演算手段において演算に使用される誘導機定数を補正することを特徴とする誘導機可変速駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP06533798A JP3687331B2 (ja) | 1998-03-16 | 1998-03-16 | 誘導機可変速駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP06533798A JP3687331B2 (ja) | 1998-03-16 | 1998-03-16 | 誘導機可変速駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11266595A JPH11266595A (ja) | 1999-09-28 |
| JP3687331B2 true JP3687331B2 (ja) | 2005-08-24 |
Family
ID=13284029
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP06533798A Expired - Fee Related JP3687331B2 (ja) | 1998-03-16 | 1998-03-16 | 誘導機可変速駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3687331B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4596092B2 (ja) * | 2000-03-31 | 2010-12-08 | 株式会社安川電機 | 誘導電動機の磁束位置推定方法および制御装置 |
| KR100738755B1 (ko) * | 2003-04-22 | 2007-07-12 | 마츠시타 덴끼 산교 가부시키가이샤 | 모터 제어 장치, 압축기, 공기 조화기, 및 냉장고 |
| CN103178757A (zh) * | 2013-02-27 | 2013-06-26 | 湘潭市电机车厂有限公司 | 斩波控制驱动盒 |
| CN107846166B (zh) * | 2016-09-20 | 2021-08-06 | 株式会社安川电机 | 电机的初始磁极位置检测方法和装置、电力变换装置 |
-
1998
- 1998-03-16 JP JP06533798A patent/JP3687331B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11266595A (ja) | 1999-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1322667C (zh) | 交流电动机的无传感器控制装置及控制方法 | |
| JP3645509B2 (ja) | 誘導電動機のセンサレスベクトル制御システムおよびセンサレスベクトル制御方法 | |
| JP3467961B2 (ja) | 回転電機の制御装置 | |
| JP3818086B2 (ja) | 同期モータの駆動装置 | |
| JPH07245981A (ja) | 電動機の磁極位置検出装置 | |
| JP3152058B2 (ja) | 誘導電動機の可変速制御装置 | |
| JPH08280199A (ja) | 永久磁石界磁同期電動機のセンサレス制御装置 | |
| JP2003299391A (ja) | 回転電機の制御装置 | |
| JP3097610B2 (ja) | 誘導機可変速駆動装置 | |
| JP2002136197A (ja) | センサレスベクトル制御装置およびその方法 | |
| JP3435975B2 (ja) | 回転電機の電流制御部及びこれを用いた制御装置 | |
| JP3185604B2 (ja) | 誘導機の制御装置 | |
| JP3687331B2 (ja) | 誘導機可変速駆動装置 | |
| JP3767896B2 (ja) | ステッピングモータの駆動装置 | |
| JP2010035352A (ja) | 同期電動機のロータ位置推定装置 | |
| JP2004048933A (ja) | Dcブラシレスモータの制御装置 | |
| JP4120775B2 (ja) | 交流電動機のベクトル制御方法及び同装置 | |
| JP3684661B2 (ja) | 交流電動機の制御装置 | |
| JP3161237B2 (ja) | 誘導電動機制御装置 | |
| JP3053121B2 (ja) | 誘導電動機の制御方法 | |
| JPH08294299A (ja) | 誘導電動機制御装置及びこれを用いた電動式パワーステアリング装置 | |
| JP3797484B2 (ja) | ステッピングモータの駆動装置 | |
| JP2634959B2 (ja) | 速度センサレス速度制御方式 | |
| JP2003259698A (ja) | 三相電流検出器のゲイン補正方法 | |
| JP3160778B2 (ja) | インバータ駆動電動機の速度推定方法及び装置並びにその速度推定方法を用いてなる電動機のベクトル制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20031226 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20040205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040728 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20041202 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050125 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20050128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050517 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050530 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080617 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090617 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100617 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |