JP3684807B2 - 廃棄瓶の仕分装置 - Google Patents
廃棄瓶の仕分装置 Download PDFInfo
- Publication number
- JP3684807B2 JP3684807B2 JP00680398A JP680398A JP3684807B2 JP 3684807 B2 JP3684807 B2 JP 3684807B2 JP 00680398 A JP00680398 A JP 00680398A JP 680398 A JP680398 A JP 680398A JP 3684807 B2 JP3684807 B2 JP 3684807B2
- Authority
- JP
- Japan
- Prior art keywords
- bottle
- waste
- sorting
- color
- type
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Description
【発明の属する技術分野】
本発明は、廃棄瓶処理に用いられる廃棄瓶の仕分装置に関し、詳しくは不燃ゴミである廃棄瓶を色別、あるいは瓶の種類別に分別して再生資源として回収するための廃棄瓶の仕分装置に係わるものである。
【0002】
【従来の技術】
従来、不燃ゴミである廃棄瓶を再利用するに当たり、廃棄瓶の色あるいは種別の識別処理を行って分別する回収装置がある。この回収装置は、一般に空の廃棄瓶(空瓶)の投入手段、空瓶のサイズ別に分別する手段、空瓶の色または形状を識別する識別手段、識別結果に基づいて仕分ける仕分手段及び排出・搬送手段等から構成されている。この種の空瓶分別装置の従来例としては、特開平8−155401号公報に開示された瓶の色彩選別装置がある。
【0003】
従来例の色彩選別装置について、図9〜図11を参照して説明する。図9はその平面図、図10はその側面図である。この色彩選別装置は、回収されたガラス瓶(空瓶)Gを茶色、黒色、青色、透明等に選別するものであり、ガラス瓶Gを形状選別機によって形状別に選別したガラス瓶Gを供給する供給装置20と、供給装置20から供給されたガラス瓶Gを仕分ける仕分装置30と、仕分装置30でガラス瓶Gを仕分ける前に、ガラス瓶Gの色彩を判別する色彩判別装置40と、供給装置20,仕分装置30,色彩判別装置40を制御する制御盤50とから構成されている。
【0004】
供給装置20は、支脚に取り付けられた一対の供給フレーム21に、ドライブプーリ22と従動ローラ23a〜23dとが回転自在に支持され、このドライブプーリ22と従動ローラ23a〜23dとにコンベアベルト24が無端状に設けられ、コンベアベルト24を駆動モータ25で駆動させている。供給フレーム21の上面側には、ガラス瓶Gを仕分装置30側に案内する一対のガイド26とガラス瓶Gの落下を防止するホッパ27とが設けられている。
【0005】
仕分装置30は、支脚に取り付けられた一対の搬送フレーム31に、回転自在にドライブプーリ32と従動ローラ33a〜33dとが回転自在に支持され、このドライブプーリ32と従動ローラ33a〜33dとに無端状のコンベアベルト34が巻き掛けられ、コンベアベルト34を駆動モータ35で駆動させている。仕分装置30の前段には、色彩判別装置40が設られている。供給装置20から供給されたガラス瓶Gは、コンベアベルト34に載置されて色彩判別装置40に送り込まれて、色種別等が判別されている。そして、コンベアベルト34に載置されたガラス瓶Gは、仕分装置30に送り込まれる。仕分装置30は、ガラス瓶Gをダンパ61A〜61Eを備えた瓶ヒッタ60A〜60Eで色彩別に振り分けて、コンベアベルト34の下方に設けられたコンテナ36a〜36eに送り込まれるか、またはコンテナ36fに送られて仕分けされている。
【0006】
瓶ヒッタ60A〜60Eは、搬送ベルト34の搬送方向下流側に向かって配列され、コンベアベルト34で搬送されるガラス瓶Gを瓶ヒッタで選択的にヒットして仕分けている。瓶ヒッタは、図11の瓶ヒッタ60Aを参照して説明すると、瓶ヒッタは、門形フレ−ム62Aがコンベアベルト34を跨ぐように設けられ、門形フレ−ム62Aの梁部63aにダンパ61Aが横軸63Aに回動自在に支持されたダンパ61Aと、ダンパ61Aを回動するためのシリンダ64Aとで構成されている。瓶ヒッタ61Aでヒットしたガラス瓶Gは、コンベアベルト34からシュート65Aへと排出されて、コンテナ36aに回収される。
【0007】
色彩判別装置40は、光源L1,L2と、ガラス瓶Gが濃淡検出位置に搬送されたことを検知する検知スイッチ42Aと、ガラス瓶Gが画像情報取込位置に搬送されたことを検知する検知スイッチ42Bと、照度計43と、絞り機構45付きCCDカメラ44と、パーソナルコンピュータ70とが架台41に設置されている。ガラス瓶Gは、CCDカメラ44で撮影されてその画像情報をパーソナルコンピュータ70で処理して、制御盤50へと送られている。制御盤50は、供給装置20、仕分装置30、色彩判別装置40を制御している。
【0008】
【発明が解決しようとする課題】
従来の色彩選別装置は、長手方向に一列に整列させた空瓶の色や形状を識別して、その認識結果に基づいて、所定の排出口へ空瓶を搬送して仕分装置に送り込み、仕分装置に設けられたダンパを回動させて、ダンパで空瓶を叩き出して所定の排出口に排出している。この仕分け方法では、多くのガラス瓶を短時間に処理するには、シリンダを高速に作動させてダンパを回動させて、空瓶を排出口に叩き出す方法であり、シリンダによるダンパの高速動作には限界があり、高速応答性に欠ける欠点がある。さらに、高速にダンパを回動させて多くの空瓶を叩き出して排出することから、ダンパの損傷が激しく、仕分装置が破壊するおそれもあり、仕分け作業を停止せざる得ない状態に陥るおそれがあり、改善の余地があった。
【0009】
本発明は、上記のような課題に鑑みなされたものであり、廃棄瓶を高速に処理することができる廃棄瓶の仕分装置を提供することを目的とするものである。
さらに、本発明は、廃棄瓶を圧縮空気により、ほぼ平行移動させて仕分け口に排出することによって、廃棄瓶を高速に処理することができる廃棄瓶の仕分装置を提供することを目的とするものである。
【0010】
【課題を解決するための手段】
上記課題を解決するために、請求項1の発明は、廃棄瓶を色別あるいは種別に選別するための廃棄瓶の仕分装置において、
前記廃棄瓶を長手方向に一列に整列させて搬送させる搬送過程で、該廃棄瓶に圧縮空気を吹き付けて、廃棄瓶を色別あるいは種別に選別して仕分ける際に、前記廃棄瓶の撮影画像から該廃棄瓶の長手方向における重心位置を算出し、前記圧縮空気を前記重心位置に合わせて放出して、前記廃棄瓶を色別あるいは種別に仕分ける制御手段を具備することを特徴とする廃棄瓶の仕分装置である。
この構成によれば、廃棄瓶の撮影画像から該廃棄瓶の長手方向における重心位置を算出して、圧縮空気をその位置に吹き付けることによって、圧縮空気による廃棄瓶の受圧のピーク位置を廃棄瓶の長手方向における重心と一致させることにより、廃棄瓶の形状によらず、廃棄瓶に異常な回転運動を与えることなく、所定の仕分け口に高速に排出して廃棄瓶を色別あるいは種別に仕分けることができる。
【0011】
また、請求項2の発明は、廃棄瓶を色別あるいは種別に選別するための廃棄瓶の仕分装置において、
供給される廃棄瓶を長手方向に一列に整列させて搬送する搬送手段と、
搬送途上の前記廃棄瓶が所定位置を通過する位置信号によってその長さを計測する計測手段と、
搬送途上の前記廃棄瓶の画像を撮影する撮影手段と、
前記撮影手段による撮影画像から、搬送途上の前記廃棄瓶の色または種別を検出するとともに、前記廃棄瓶の長手方向における重心位置を算出する画像処理手段と、
複数のエアーノズルが配置され、前記画像処理手段により認識された廃棄瓶の色または種別に応じて選択されたエアーノズルからの圧縮空気を放出して、前記廃棄瓶を色別あるいは種別の仕分け口に排出する排出手段と、
前記画像処理手段で認識した廃棄瓶の色または種別と廃棄瓶の長手方向における重心位置とに基づいて算出した廃棄瓶の色別あるいは種別に仕分ける仕分位置までの搬送距離を認識し、廃棄瓶の長手方向における重心位置に合わせて、廃棄瓶の色または種別に対応する仕分け口まで搬送して、前記排出手段を動作させて廃棄瓶を色別あるいは種別に仕分ける制御手段とを備えることを特徴とする廃棄瓶の仕分装置である。
この構成によれば、廃棄瓶を撮影してその映像信号を画像処理し、その長手方向の画像から廃棄瓶の長手方向における重心位置を算出して、廃棄瓶の長手方向における重心位置を考慮して、仕分けバルブを操作して、エアーノズルから圧縮空気を瓶に吹き付けて、廃棄瓶を所定の仕分け口に平行移動させて高速に送り込み、廃棄瓶を色別あるいは種別に仕分けることができる。
【0012】
【発明の実施の形態】
以下、本発明に係る廃棄瓶の仕分装置の実施の形態について、図面を参照して説明する。
【0013】
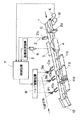
図1は、本発明に係る廃棄瓶の仕分装置の一実施形態の概略を示す斜視図である。同図において、1は湾曲部または緩やかなV字部等に空瓶Gを搬送させるベルトコンベア、2はベルトコンベア1で搬送される空瓶Gの先端部と後端部の通過を検出する発光部2aと受光部2bとからなる通過センサ、3は空瓶Gを撮影して得られる映像信号を処理する画像処理装置、4は空瓶Gを照明する照明装置、5は照明された空瓶Gから投影像を上方に反射させるために約45度の傾きで配置された反射鏡、6は反射鏡5に写る瓶投影像を撮影するCCD素子等を用いたTVカメラ、7は空瓶Gの仕分装置を制御するための制御装置、8は制御装置7からの制御信号によって仕分けバルブ9a〜9nの開閉を操作するバルブ駆動装置、10a〜10nのそれぞれは圧縮空気の吹き出し口が複数設けられたエアーノズル、11a〜11nは空瓶Gを色別あるいは種別に分別して回収するための仕分け口、12は仕分け口11a〜11nによる選別対象外等の空瓶Gを排出する排出口である。Mは駆動モータであり、Eは駆動モータMの回転に連動して発生するパルスを位置信号(コード信号)に変換するコンベアエンコーダ(以下、エンコーダ)である。
【0014】
図2は、本実施形態の制御系を示すブロック図である。制御装置7は、CPU(中央制御処理装置)と記憶装置7mとを備えている。CPUは、空瓶の撮影位置までの搬送距離を算出する搬送距離算出手段7aと、仕分位置までの搬送距離を算出する搬送距離算出手段7bと、空瓶の色に対応した仕分位置に搬送されたことを判定する種別仕分位置判定手段7cとの機能を有している。制御装置7には、エンコーダEからの位置信号(コード信号)が入力され、通過センサ2からオン・オフ信号(瓶先端通過信号と瓶後端通過信号)が入力される。かつ、反射鏡5に写る投影像をTVカメラ6で常時撮影して、その映像信号が画像処理装置3に入力される。所定の撮影位置に空瓶が到来すると、画像フリーズ信号に基づいて、空瓶投影像の画像信号が画像処理されて制御装置7に入力される。種別仕分位置判定手段7cからの制御信号によって、バルブ駆動装置8を働かせて、仕分けバルブ9a〜9nの開閉制御を行い、順次供給される空瓶Gを色別あるいは種別毎に所定の仕分け口から排出して仕分けている。
【0015】
記憶装置7mには、空瓶Gの先端が通過センサ2を通過した時点の位置信号(コード信号)k、瓶供給順に空瓶の色または種別と瓶長さL、通過センサ2からTVカメラ6による撮影中心までの既知の距離l0 、通過センサ2からエアーノズル10a〜10nのそれぞれの中心(ノズルセンタ)までの既知の距離la〜lnが記憶されている。また、記憶装置7mには、それぞれの空瓶Gの中心から瓶の重心までの距離δ1が瓶供給順に記憶される。さらに、仕分けバルブ9a〜9nの開時間とベルトコンベア速度とから決まる補正値δtが記憶されている。
【0016】
続いて、本実施形態の廃棄瓶の仕分装置の動作について、図1と図2を参照して説明する。先ず、ベルトコンベア1は、駆動モータMを駆動させることによって駆動し、供給装置から一本づつ空瓶Gが仕分装置に供給される。エンコーダEからは、位置信号が制御装置7に入力されている。供給装置から空瓶Gがベルトコンベア1に一本づつ投入されると、ベルトコンベア1は湾曲または緩やかなV字状を形成しており、空瓶Gが搬送方向に長手方向一列に整列して搬送される。空瓶Gがベルトコンベア1で搬送され、空瓶Gの先端が通過センサ2を通過すると、発光部2aからの光が瓶先端分部で光を遮って受光部2bで受光されないので、受光部2bはオンとなる。この信号を先端通過信号と認識するとともに、制御装置7は、エンコーダEからの位置信号による指示値kを記憶する。そして、空瓶Gの後端が通過センサ2を通過して、通過センサ2がオフとなると、制御装置7はこの信号を後端通過信号と認識する。制御装置7は、瓶先端通過信号と瓶後端通過信号とにより、空瓶Gの長さLを算出する。この空瓶Gの長さLは、瓶供給順に記憶装置7mに記憶される。制御装置7では、その空瓶の撮影に最も適した撮影位置までの搬送距離を算出する。例えば、通過センサ2から撮影中心までの既知の距離l0 と瓶中心L/2とによって、撮影位置が決定される。通過センサ2から撮影位置は、瓶供給順に記憶装置7mに記憶される。
【0017】
空瓶Gが撮影位置に搬送されると、画像フリーズ信号に基づいてTVカメラ6で撮影した反射鏡5に写る投影像の映像信号が画像処理装置3に送り込まれる。この画像処理装置3では、空瓶の色または種別、瓶の長手方向の画像から瓶の重心が算出され、瓶中心L/2と重心位置の距離が算出される。これらの情報が制御装置7に送られる。
【0018】
制御装置7では、空瓶を重心を考慮した瓶搬送距離が算出される。通過センサ2からのノズル中心までの既知の距離la,…,lnに、瓶中心L/2と重心を考慮した瓶搬送距離が算出される。その瓶搬送距離に応じて制御装置7から仕分けのための制御信号がバルブ駆動装置8に送られる。バルブ駆動装置8は、仕分けのための制御信号に基づいて、仕分けバルブ9a〜9nのいずれかを開閉して、エアーノズル10a〜10nのいずれかが選択され、空瓶の重心を考慮した位置に圧縮空気が吹き出して空瓶が所定の仕分け口に送り込まれて瓶が色別あるいは種別に仕分けされる。
【0019】
さらに、本発明の廃棄瓶の仕分装置について、図3〜図8を参照して詳細に説明する。図3は、空瓶を色別に仕分けるための搬送距離算出方法を説明するための図であり、図4は、制御装置7を動作させるための概略のシステム動作フローであり、図5〜図7は、空瓶を仕分けるための概略の制御フローを示す図である。図8は、制御装置7を動作させるための他のシステム動作フローを示す概略図である。
【0020】
先ず、図3を参照して、各搬送距離の算出について説明する。
廃棄瓶の撮影位置までの搬送距離は、通過センサ2から空瓶Gの撮影位置6aまでであり、撮影位置6aに、空瓶Gの長さLの中心に来るように設定される。従って、空瓶Gの長さLは、空瓶Gの先端部が通過センサ2を通過したときの指示値(コード信号)をKとし、空瓶Gの後端部が通過した時点の指示値(コード信号)をK0 とすると、(K0 −K)より算出することができる。指示値Kは記憶される。また、通過センサ2から撮影位置6aまでの距離l0 は既知であるので、撮影位置6aに空瓶Gの中心(L/2)が到達した時点が撮影タイミングであり、撮影位置6aまでの搬送距離は、(K+l0 +L/2)で定められる。なお、l0 ,Lはコード信号である。
【0021】
空瓶を色別に仕分ける仕分位置までの搬送距離は、通過センサ2からノズル中心(Aa〜An)までの距離であり、空瓶Gの色別に仕分けるための仕分け口11a〜11nまでの距離、すなわち通過センサ2からエアーノズル10a〜10nのノズル中心(Aa〜An)までのそれぞれの既知の距離la〜lnと、空瓶Gの中心から重心位置までの距離δ1と、補正値δtと、通過センサ2を通過したときの指示値(コード信号)をKとから算出することができる。その搬送距離は、(K+la+L/2+δ1+δt)〜(K+ln+L/2+δ1+δt)で算出される。なお、重心補正値δtはコード信号であり、空瓶の長さLに応じて、簡易的に重心補正値を設定または算出してもよい。
【0022】
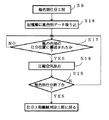
さらに、図4〜図8のフローを参照して、廃棄瓶の仕分装置の空瓶の色別仕分け操作について説明する。図4は、システム動作フローを示している。先ず、ステップS1では仕分装置を動作可能な状態にセットし、それぞれが正常に動作するか否かを確認し、正常に動作することを確認した場合、ステップS2に進み、瓶供給装置を作動させる。続いて、ステップS3に進み、撮影位置までの搬送距離算出工程を実行する。空瓶Gが瓶供給装置から仕分装置に一本づつベルトコンベア1に供給され、搬送される空瓶Gが通過センサ2を通過する際に、空瓶先端が通過した時点と空瓶後端が通過した時点の通過信号が制御装置7に入力されて、瓶先端通過信号と瓶後端通過信号と認識し、これらの通過信号から空瓶長さLが算出される。続いて、ステップS4に進み、画像処理工程が実行されて瓶供給順に空瓶の色や種別、重心が認識される。ステップS5に進み、仕分位置までの搬送距離算出工程を実行する。ステップS6では、瓶色仕分工程では搬送されてくる空瓶の色毎にエアーノズルから圧縮空気を噴出させて空瓶を仕分ける。ステップS7に進み、仕分け操作が完了か否かを判断して継続する場合はステップS3に戻り、同様な操作を繰り返す。
【0023】
続いて、各制御フローについて説明する。
撮影位置までの搬送距離算出工程について、図5(a)を参照して説明する。
ステップS8では、空瓶Gが通過センサ2を通過する際の先端通過信号と後端通過信号に基づいて、瓶の長さLが算出され、瓶の長さLからその瓶中心L/2が求められる。続いて、ステップS9では、撮影位置(撮影中心)までの搬送距離を、K+l0 +L/2の演算式から算出して、瓶供給順に記憶される。続いて、画像処理工程に戻る。
【0024】
画像処理工程について、図5(b)を参照して説明する。ステップS10に基づいて、空瓶が先に求めた搬送距離(K+l0 +L/2)に到達したことを認識し、ステップS11に進む。ステップS11では、所定の撮影位置に到来すると、画像フリーズ信号を発生して空瓶を撮影するか、または撮影画像を取り込む。ステップS12では、画像処理装置に取り込んで画像から空瓶の色と種別、空瓶の画像から空瓶の長手方向における重心を検出し、それらの処理情報が制御装置7に入力されて、瓶供給順に記憶される。なお、空瓶の長手方向における重心は瓶長さLの中心より、瓶の底方向に偏った位置であって、予め空瓶の長さLに対応したほぼ一定の位置を中心からの重心補正値δ1としてもよい。
【0025】
仕分位置までの搬送距離算出工程について、図6を参照して説明する。ステップS13では、画像処理装置による重心補正値δ1を取り込み、ステップS14にて、通過センサ2からノズルセンタ(Aa〜An)までの距離(la〜ln)は既知であり、仕分け口11a〜11nまでの搬送距離は、エアーノズル10a〜10nのそれぞれのノズル中心(Aa〜An)までの距離である。ノズル中心(Aa〜An)までの搬送距離は、(K+la+L/2+δ1+δt),……,(K+ln+L/2+δ1+δt)で算出される。δ1は空瓶の中心から重心位置までの距離である。重心補正値δtは、仕分けバルブの開時間とコンベア速度から決まる補正値である。
【0026】
瓶色別仕分工程では、図7を参照して説明する。ステップS16において、瓶色別データを取り込み、ステップS17において、瓶供給順に瓶の色に応じたノズル中心(Aa〜An)までの搬送距離である、(K+la+L/2+δ1+δt),…,(K+ln+L/2+δ1+δt)を判定して、所定の位置まで搬送されたと判定されると、ステップS18に進む。ステップS18では、瓶の色に応じて仕分けバルブ9a〜9nの何れを操作して、圧縮空気による受圧のピーク位置を空瓶の重心に向かって放出し、仕分け口11a〜11nの何れかに平行移動させて色別に回収する。続いて、ステップS19にて、瓶色別仕分けが終了したか否かを判断して、継続する場合は、ステップS17に戻り、終了する場合は、システム動作フローであるステップS7に進む。
【0027】
無論、図8に示したように、ステップS22の撮影位置までの搬送距離算出工程に続いて、ステップS23の仕分位置までの搬送距離算出工程を実行した後に、ステップS24の画像処理工程を行ってもよい。その場合、認識された色に応じて、仕分位置までの搬送距離を選択して、空瓶を認識した色に応じて仕分け口に搬送し、色別あるいは種別に仕分けてもよい。
【0028】
なお、上記実施形態において、通過センサでは、受光部と発光部とで構成されているが、反射型の通過センサを用いてもよい。
また、図1では、圧縮空気を吹き出すエアーノズルの吹き出し口が2本で構成されている実施形態であるが、必ずしもこの実施形態に限定されることなく、対象となる瓶の大さ及び圧縮空気の圧力等により、より多数のノズルを必要とする場合があるが、このような場合であっても含まれる。
また、エアーノズルの数が3本等奇数本の場合には、中央のノズル位置が重心と一致した時、圧縮空気を空瓶に吹き出すことにより、ほぼ同等の効果をあげることができる。しかし、この場合、移動中の瓶の位置を際めて正確に捉える必要があるので、エアーノズルの数は偶数本がより望ましい。
【0029】
【発明の効果】
上記記載のように、本発明によれば、廃棄瓶の仕分装置において、空瓶の識別結果に基づいて、空瓶を単純な構造で高速に仕分けることができる利点がある。
また、本発明によれば、廃棄瓶を板状のダンパ等で叩いて排出する場合、空瓶が異常な動きをして、排出口に詰まるおそれがあるが、本発明では圧縮空気で排出しており、そのようなおそれがなく、空瓶を色別または種別に高速に仕分けることができる利点がある。
また、本発明によれば、圧縮空気による瓶の受圧のピーク位置を瓶の重心と一致させて、吹き付けることにより、廃棄瓶の形状によらず、廃棄瓶に異常な回転運動を与えることなく、選択的に廃棄瓶を高速に色別に仕分けることができる利点がある。
また、本発明によれば、空瓶をエアー方式で仕分ける処理方法では、複数本のエアーノズルから圧縮空気を吹き付けて、空瓶に回転力を与えることなく、所定の排出口へ排出することができる利点がある。
【図面の簡単な説明】
【図1】本発明に係る廃棄瓶の仕分装置の一実施形態を示す斜視図である。
【図2】本発明に係る廃棄瓶の仕分装置の制御ブロック図である。
【図3】本発明に係る廃棄瓶の仕分装置の搬送距離を説明するための説明図である。
【図4】本発明に係る廃棄瓶の仕分装置の概略のシステム動作フロ−を示す図である。
【図5】(a)は撮影位置までの搬送距離算出工程の概略の制御フロー、(b)は画像処理工程の概略の制御フローを示す図である。
【図6】仕分位置までの搬送距離算出工程の概略の制御フローを示す図である。
【図7】瓶色別仕分工程の概略の制御フローを示す図である。
【図8】本発明に係る廃棄瓶の仕分装置の他の概略のシステム動作フロ−を示す図である。
【図9】従来の色彩選別装置の平面図である。
【図10】従来の色彩選別装置の側面図である。
【図11】図10のA−A断面図である。
【符号の簡単な説明】
1 コンベアベルト
2 通過センサ
3 画像処理装置
4 照明装置
5 反射鏡
6 TVカメラ
7 制御装置
8 バルブ駆動装置
9a〜9n 仕分けバルブ
10a〜10n エアーノズル
11a〜11n 仕分け口
12 排出口
M 駆動モータ
E コンベアエンコーダ
Claims (2)
- 廃棄瓶を色別あるいは種別に選別するための廃棄瓶の仕分装置において、
前記廃棄瓶を長手方向に一列に整列させて搬送させる搬送過程で、該廃棄瓶に圧縮空気を吹き付けて、廃棄瓶を色別あるいは種別に選別して仕分ける際に、前記廃棄瓶の撮影画像から該廃棄瓶の長手方向における重心位置を算出し、前記圧縮空気を前記重心位置に合わせて放出して、前記廃棄瓶を色別あるいは種別に仕分ける制御手段を具備することを特徴とする廃棄瓶の仕分装置。 - 廃棄瓶を色別あるいは種別に選別するための廃棄瓶の仕分装置において、
供給される廃棄瓶を長手方向に一列に整列させて搬送する搬送手段と、
搬送途上の前記廃棄瓶が所定位置を通過する際の位置信号によってその長さを計測する計測手段と、
搬送途上の前記廃棄瓶の画像を撮影する撮影手段と、
前記撮影手段による撮影画像から、搬送途上の前記廃棄瓶の色または種別を認識するとともに、前記廃棄瓶の長手方向における重心位置を算出する画像処理手段と、
複数のエアーノズルが配置され、前記画像処理手段により認識された廃棄瓶の色または種別に応じて選択されたエアーノズルから圧縮空気を放出して、前記廃棄瓶を色別あるいは種別の仕分け口に排出する排出手段と、
前記画像処理手段で認識した廃棄瓶の色または種別と廃棄瓶の長手方向における重心位置とに基づいて算出した廃棄瓶の色別あるいは種別に仕分ける仕分位置までの搬送距離を認識し、廃棄瓶の長手方向における重心位置に合わせて、廃棄瓶の色または種別に対応する仕分け口まで搬送して、前記排出手段を動作させて廃棄瓶を色別あるいは種別に仕分ける制御手段と
を備えることを特徴とする廃棄瓶の仕分装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP00680398A JP3684807B2 (ja) | 1998-01-16 | 1998-01-16 | 廃棄瓶の仕分装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP00680398A JP3684807B2 (ja) | 1998-01-16 | 1998-01-16 | 廃棄瓶の仕分装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11197609A JPH11197609A (ja) | 1999-07-27 |
| JP3684807B2 true JP3684807B2 (ja) | 2005-08-17 |
Family
ID=11648361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP00680398A Expired - Fee Related JP3684807B2 (ja) | 1998-01-16 | 1998-01-16 | 廃棄瓶の仕分装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3684807B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103008258A (zh) * | 2012-12-06 | 2013-04-03 | 天津普达软件技术有限公司 | 一种桶装方便面碗盖分拣及组合系统 |
| CN103084338A (zh) * | 2013-02-04 | 2013-05-08 | 肖特新康药品包装有限公司 | 药用玻璃瓶的机头输送检测平台 |
| CN105537125A (zh) * | 2015-12-14 | 2016-05-04 | 朱孝军 | 一种蜜枣加工用双向同步筛分机构 |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5415876B2 (ja) * | 2009-09-09 | 2014-02-12 | 株式会社日立情報制御ソリューションズ | 搬送装置 |
| JP5657356B2 (ja) * | 2010-11-29 | 2015-01-21 | 東急建設株式会社 | 廃棄物選別システム |
| CN103128056A (zh) * | 2012-12-11 | 2013-06-05 | 汉升密封科技(上海)有限公司 | 一种用于自动检测及分选工作件的系统 |
| JP6098881B2 (ja) * | 2013-05-30 | 2017-03-22 | パナソニックIpマネジメント株式会社 | 選別装置 |
| JP2015020314A (ja) * | 2013-07-18 | 2015-02-02 | 大阪エヌ・イー・ディー・マシナリー株式会社 | ペットボトル選別装置 |
| CN104923490B (zh) * | 2014-03-18 | 2017-09-15 | 中原工学院 | 一种发条的生产系统 |
| CN104923488B (zh) * | 2014-03-18 | 2017-09-15 | 中原工学院 | 一种发制品原料预处理系统 |
| CN104923489B (zh) * | 2014-03-18 | 2017-09-15 | 中原工学院 | 一种发制品原料挑白发及顺发的方法 |
| CN105195442B (zh) * | 2015-10-16 | 2017-06-06 | 中国水产科学研究院渔业机械仪器研究所 | 一种基于机器视觉的淡水鱼新鲜度分级系统及方法 |
| CN107961989A (zh) * | 2017-12-21 | 2018-04-27 | 广州南沙珠江啤酒有限公司 | 一种适用于瓶体内存留酒沫的酒瓶液位检测系统及检测方法 |
| CN111617988A (zh) * | 2020-05-06 | 2020-09-04 | 浙江虎哥环境有限公司 | 一种废旧玻璃自动化分拣工作站 |
| JP6842076B1 (ja) * | 2020-05-20 | 2021-03-17 | 株式会社Nrs | 廃棄物選別システム、及び廃棄物選別方法 |
| JP2022006883A (ja) | 2020-06-25 | 2022-01-13 | キヤノン株式会社 | 識別装置 |
| CN112791969A (zh) * | 2020-12-22 | 2021-05-14 | 三峡大学 | 粽叶分选下料装置及工作方法 |
| CN113102273A (zh) * | 2021-04-25 | 2021-07-13 | 深圳市永丰盈电子有限公司 | 自动送料方法、装置、设备、介质及计算机程序产品 |
| KR102383115B1 (ko) * | 2021-09-01 | 2022-04-08 | 주식회사 월드멀티넷 | Ai를 활용한 투명페트병 자동 선별 기술 및 탄소배출 저감 산출방식의 수집장치 |
| CN115301555A (zh) * | 2022-08-10 | 2022-11-08 | 苏州嘉诺智能装备有限公司 | 一种瓶罐类分选回收系统 |
-
1998
- 1998-01-16 JP JP00680398A patent/JP3684807B2/ja not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103008258A (zh) * | 2012-12-06 | 2013-04-03 | 天津普达软件技术有限公司 | 一种桶装方便面碗盖分拣及组合系统 |
| CN103008258B (zh) * | 2012-12-06 | 2014-12-03 | 天津普达软件技术有限公司 | 一种桶装方便面碗盖分拣及组合系统 |
| CN103084338A (zh) * | 2013-02-04 | 2013-05-08 | 肖特新康药品包装有限公司 | 药用玻璃瓶的机头输送检测平台 |
| CN105537125A (zh) * | 2015-12-14 | 2016-05-04 | 朱孝军 | 一种蜜枣加工用双向同步筛分机构 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11197609A (ja) | 1999-07-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3684807B2 (ja) | 廃棄瓶の仕分装置 | |
| US11389834B2 (en) | Systems and methods for sorting recyclable items and other materials | |
| US5894938A (en) | Glass cullet separation apparatus | |
| US6959108B1 (en) | Image based defect detection system | |
| US4946046A (en) | Apparatus for sorting seeds according to color | |
| JP3104949B2 (ja) | 廃瓶の選別装置 | |
| US5150307A (en) | Computer-controlled system and method for sorting plastic items | |
| EP0599228B1 (en) | Conveying and aligning apparatuses suitable for lens-fitted photographic film packages | |
| US4757382A (en) | Transporting devices | |
| US11577279B2 (en) | Method and apparatus for sorting heterogeneous material | |
| CA2310838A1 (en) | Method and device for identifying and sorting objects conveyed on a belt | |
| WO2006130911A1 (en) | A sorting apparatus | |
| JPH1019534A (ja) | 球状部品の検査分類装置 | |
| JP2004050106A (ja) | 椎茸自動選別仕分け設備 | |
| KR100934901B1 (ko) | 재활용 유리병의 색 선별 장치 및 방법 | |
| JP3677908B2 (ja) | 廃棄瓶色別選別方法及びその選別装置 | |
| JPH11337411A (ja) | 色識別のための透過光撮影装置 | |
| CA1308384C (en) | Apparatus for sorting seeds | |
| JPH0623328A (ja) | 部品仕分装置 | |
| JPH09229634A (ja) | 選別装置及び選別方法 | |
| JP2000176384A (ja) | ビン自動選別装置 | |
| JP2002086077A (ja) | 搬送物の選別装置 | |
| JP2000085783A (ja) | 容器類流通方法および容器類流通システム | |
| JPH11179293A (ja) | 廃びん選別装置 | |
| JP2002316728A (ja) | ワーク繰出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050118 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050318 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050523 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313121 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313121 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080610 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080610 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090610 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100610 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100610 Year of fee payment: 5 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313115 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100610 Year of fee payment: 5 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110610 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |