JP3662089B2 - 作業車の制御装置 - Google Patents
作業車の制御装置 Download PDFInfo
- Publication number
- JP3662089B2 JP3662089B2 JP05269897A JP5269897A JP3662089B2 JP 3662089 B2 JP3662089 B2 JP 3662089B2 JP 05269897 A JP05269897 A JP 05269897A JP 5269897 A JP5269897 A JP 5269897A JP 3662089 B2 JP3662089 B2 JP 3662089B2
- Authority
- JP
- Japan
- Prior art keywords
- target value
- control
- control target
- work
- identification data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Combines (AREA)
- Harvester Elements (AREA)
- Arrangement Or Mounting Of Control Devices For Change-Speed Gearing (AREA)
Description
【発明の属する技術分野】
本発明は、作動部の制御目標値を設定する制御目標値設定手段と、その制御目標値設定手段にて設定された制御目標値に基づいて、前記作動部の作動を制御する制御手段とが設けられた作業車の制御装置に関する。
【0002】
【従来の技術】
例えば作業車の一例としての農作業用のコンバインでは、車速制御される変速装置や刈高さ制御される刈取部等の各作動部に対して、車速制御での最高車速や刈高さ制御での設定刈高さ等の制御目標値を作業者が予め設定し、その各制御目標値の情報と各種のセンサ等の検出情報に基づいて各作動部を作動させるように制御される(例えば、特開平4‐335816号公報参照)。
【0003】
【発明が解決しようとする課題】
ところで、例えばコンバイン等の農作業車では、営農組合等に備えた機械を複数の農家が共同で使用する場合があるが、このときに、各作業者が、経験年数等による自己の技量を考慮しながら、作業対象である稲、麦等の作物に対応する作業条件の夫々について、例えば車速制御において、作業能率を上げるために最高車速を高く設定したり、作業を確実に行うために最高車速を低く設定する等、異なる制御目標値を設定している。そのため、従来では、作業条件が変わる毎に、各作業条件についての制御目標値をいちいち設定し直す必要があり、その設定操作が面倒でかつ長時間を要して作業負担が過大であるという不具合があった。
【0004】
本発明は、かかる実情に鑑みて為されたものであって、その目的は、複数の作業条件の夫々について、作動部の制御目標値を容易に且つ迅速に設定することができるようにして、上記従来技術の不具合を解消させることにある。
【0005】
【課題を解決するための手段】
請求項1によれば、複数の作業条件の夫々についての作動部の制御目標値が複数の作業条件の夫々と対応付けて設定されて記憶されると共に、それら複数の作業条件に対する制御目標値のうちで複数の作業条件の夫々に対応する制御目標値が制御手段に択一的に出力され、その出力された制御目標値に基づいて制御手段が作動部の作動を制御する。
【0006】
従って、複数の作業条件の夫々について設定した作動部の制御目標値を他の作業条件の制御目標値と区別して記憶させながら、所定の作業条件で作業を行うときにその作業条件に対応する制御目標値だけを出力させて制御に用いることができるので、従来のように、作業条件が変わる毎に各作業条件に合わせて作動部の制御目標値をいちいち設定し直す必要もなく、短時間で容易に適切な制御目標値を設定して作業者の負担を軽減することができる。
【0007】
また、請求項1によれば、複数の作業者毎の、複数の作業条件の夫々についての作動部の制御目標値が、複数の作業者の夫々を識別するための識別データと対応付けて設定されて記憶されると共に、指示された識別データに対応し、且つ、前記複数の作業条件のうちで選択された作業条件に対応する制御目標値が制御手段に択一的に出力される。
【0008】
従って、複数の作業者が1台の作業車を共同で使用するような場合に、各作業者が自己の技量等に合わせて設定した各作業条件毎の作動部の制御目標値を他の作業者の制御目標値と区別して記憶させて、作業車を使用するときに自己の制御目標値だけを出力させて制御目標値が設定できるので、従来のように、作業者が交代する毎に各作業者が自己に適した制御目標値をいちいち設定し直す必要もなく、短時間で容易に各作業条件毎の適切な制御目標値を設定して作業者の負担を軽減することができる。
【0009】
また、請求項1によれば、目標値入力手段にて入力された制御目標値の情報に識別データ指示手段にて指示された識別データが付加された情報が目標値記憶手段に記憶され、識別データ指示手段にて指示された識別データに基づいて目標値記憶手段から識別して読み出した制御目標値が制御手段に出力されるように処理される。
【0010】
従って、各作業者に対応する制御目標値の情報と各作業者を区別する識別データとを組み合わせて記憶するので、例えば、識別データは記憶せずに制御目標値の情報だけを記憶するのに比べて、各作業者に対応する制御目標値とともに読み出した識別データを指示された識別データと照合して、その指示された識別データに対応する作業者の制御目標値を的確に出力することができる。
【0011】
請求項2によれば、請求項1において、作動用電源が投入されるに伴って、制御目標値設定手段に記憶している制御目標値の情報が制御手段に出力され、制御手段は制御目標値設定手段から受け取った制御目標値の情報を自己に備えた制御データ記憶手段に記憶させる。
【0012】
従って、制御データ記憶手段をRAM等の高速のメモリで構成して制御データとして制御目標値の情報を記憶させると、制御手段が必要な制御目標値の情報を短時間に入手することができるので、制御目標値の情報が制御データ記憶手段に記憶されていない場合には、制御目標値設定手段内で記憶保持の必要からEEPROM等の電気的メモリや磁気記憶部等の比較的低速の記憶手段に記憶されている制御目標値の情報を、制御手段が制御目標値設定手段にアクセスして受け取ることになって、制御目標値の情報入手のための制御処理が複雑になると共に処理時間も長くなるという不具合を回避させることができ、もって、請求項1の好適な手段が得られる。
【0013】
請求項3によれば、請求項1又は2において、複数の作業条件の夫々についての複数の作動部の制御目標値が複数の作業条件の夫々と対応付けて設定・記憶されると共に、それら複数の作業条件に対する複数の作動部の制御目標値のうちで、複数の作業条件の夫々に対応する複数の作動部の制御目標値が制御手段に択一的に出力される。
【0014】
従って、作動部が複数設けられている作業車を複数の作業条件で使用するような場合にも、各作業条件における複数の作動部の制御目標値を短時間で容易に適切に設定することができ、もって、請求項1又は2の好適な手段が得られる。
【0015】
【発明の実施の形態】
以下、本発明を作業車としての農作業用のコンバインに適用した場合の実施の形態について、図面に基づいて説明する。
コンバインは、図1に示すように、左右一対のクローラ走行装置11を備える車体Vの前部に刈取部12が設けられ、その刈取部12の後方に、操縦部13、刈取穀稈を脱穀・選別する脱穀部14、脱穀部14にて脱穀・選別された穀粒を貯溜するグレンタンク15等が搭載されている。
【0016】
刈取部12は、先端部に付設された分草具16、穀稈の引き起こし装置17、引き起こした穀稈の株元を切断する刈り刃18、及び、刈取穀稈を先端側で受け取って脱穀部14まで搬送する搬送装置19を備えている。又、刈取部12の地面からの高さを検出する超音波センサS1と、穀稈が触れるとオン作動して刈取り作業中であることを検出する株元センサS2とが設けられている。超音波センサS1の高さ情報は、穀稈を刈り取るときの刈高さを設定高さに維持する刈高制御(この制御をAHCと略す)に用いられ、株元センサS2の検出情報は制御起動条件の一つとして用いられる。
【0017】
又、脱穀部14における扱深さを適正状態に維持するために、前記搬送装置19にて株元側を挟持されている搬送穀稈の穂先位置を検出するための穂先センサS3(図5参照)が、稈長方向に一対(穂先側と株元側)設けられ、この一対の穂先センサS3の検出情報に基づいて、搬送装置19の搬送先端側を後端側に対して稈長方向に揺動させて、一対の穂先センサの間に穀稈の穂先が位置する適正状態となるように制御している(この制御をAFCと略す)。
【0018】
左右のクローラ走行装置11は、車体Vに対して各別に昇降駆動できるように構成されている。これによって、地面の傾きにかかわらず車体Vを水平に維持したり、設定角度に維持するローリング制御を可能にしている。このために、車体Vの水平に対する傾きを検出するローリングセンサS4が設けられている。
【0019】
脱穀部14は、図2に示すように、扱胴21を収納する扱室A、刈取部12から供給される穀稈を搬送するフィードチェーン22、トウミ23と揺動選別板24とからなる選別装置B、穀粒回収用の一番口25、及び、穀粒と藁屑との混合物を回収するための二番口26等を備えている。扱室Aで脱穀された処理物のうち単粒化したものは、扱室Aの下部に設けられた受網27から選別装置Bに漏下し、それ以外の処理物は受網27の後端部より選別装置Bに落下する。
【0020】
選別装置Bの揺動選別板24は、トウミ23の上方に位置するグレンパン28、その後方に位置するチャフシーブ29、その下方に位置するグレンシーブ30等からなる。チャフシーブ29は、処理物移送方向に並置された複数個の帯板状部材が水平軸芯周りに同時に角度を変えることにより、隣接する帯板状部材の間隔(チャフ開度という)が変更され、このチャフ開度を検出するポテンショメータ利用のチャフ開度センサS8(図5参照)が設けられている。
【0021】
トウミ23は、揺動選別板24上の藁屑を吹き飛ばすためのものであり、その風力は、ファンケースカバー23aの開度を大きくするほどその開口部から逃げる風量が増加して、揺動選別板24上の処理物に及ぼす風力(トウミ風力という)が小さくなる。トウミ風力を検出するポテンショメータ利用のトウミ風力センサS9(図5参照)が設けられている。
【0022】
選別装置Bについては、処理物の量、種類、湿気等の条件に応じて上記のようにチャフ開度及びトウミ風力を調節する制御(選別制御)が行われる。尚、グレンシーブ30から漏下する穀粒は揺動選別板24の下方に設けられた一番口25から回収されてグレンタンク15に貯溜され、チャフシーブ29の後端やグレンシーブ30の後端から落下する穀粒と藁屑との混合物は二番口26から回収されて揺動選別板24に還元される。
【0023】
次に、動力伝達系を図3に示す。車体Vに搭載されたエンジンEの出力は、脱穀クラッチ31を介して脱穀部14に伝達されると共に、走行クラッチ32及び無段変速装置33を介してクローラ走行装置11のミッション部34に伝達される。ミッション部34に伝達された出力の一部は、刈取クラッチ35を介して刈取部12に伝達される。S7は、脱穀クラッチ31の入切状態を検出する脱穀スイッチであり、S5は、エンジンEのフライホイールリングギアに磁界を作用させて、単位時間当りの歯数に対応する周波数の正弦波を得る電磁ピックアップからなるエンジン回転数検出用の回転数センサであり、S6は、ミッション部34に設けた車速検出用の車速センサである。
【0024】
車速を増減するための作動部としての無段変速装置33は、操縦部13に設けたシフトレバーによって手動操作されると共に電動モータによって自動操作される。つまり、エンジン回転数は、エンジン負荷が増加するほど低下するので、エンジン回転数が適正範囲にあるときは定速走行を行うが、負荷が大きくなりエンジン回転数が低下すると、車速を下げて刈取り量即ち脱穀処理量を減少させて負荷を小さくし、逆に負荷が小さくなってエンジン回転数が適正範囲より高くなれば、車速を上げて刈取り量即ち脱穀処理量を増加させるように、無段変速装置33を変速操作して走行速度を増減する車速制御が行われる(この制御をASCと略す)。但し、予め設定された最高車速より速くなることはない。
【0025】
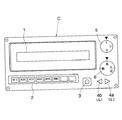
図4に示すように、各制御の起動・停止等の指令情報を入力したり、各種の制御目標値を設定したり、各種の稼働情報を表示するための表示パネルユニットCが、液晶ディスプレイモジュールとメンブレンキーボードを組み合わせた一体型のパネルとして、操縦部13に設けられている。
【0026】
表示パネルユニットCの前面には、情報表示用の表示画面1と、情報入力用のキー入力部2,3,4とが設けられている。表示画面1は、ドットマトリックス式の液晶グラフィックディスプレイで構成され、又、キー入力部2,3,4は、押しボタン式のスイッチで構成されて、各制御を選択する選択スイッチ2、切換スイッチ3及び変更スイッチ4からなる。
【0027】
次に、コンバインの制御構成を図5に示す。前記刈取部12や脱穀部14や変速装置33等の複数の作動部の動作を制御するために、メータ用コントローラ7と制御ユニット8とが、夫々マイクロコンピュータを利用して構成され、且つ、RS485インターフェース形式で相互に通信自在に設けられている。前記センサ類S1〜S9のうちの株元センサS2、穂先センサS3、回転数センサS5、脱穀スイッチS7、及び、稲、麦又は大豆のいずれかを選択する作物スイッチ6の各検出情報がメータ用コントローラ7に入力され、超音波センサS1、ローリングセンサS4、車速センサS6、チャフ開度センサS8及びトウミ風力センサS9の各検出情報が制御ユニット8に入力されている。ここで、作物スイッチ6にて選択される稲、麦、大豆の条件が、複数の作業条件の夫々に相当する。
【0028】
一方、メータ用コントローラ7からは、扱深さ調節用のアクチュエータ(揺動用モータ)M1や、AES(自動エンジン停止)用のアクチュエータ(リレー等)M2に対する駆動信号が出力され、制御ユニット8からは、刈高制御用及びローリング制御用の各アクチュエータM3〜M4、車速制御用、チャフ開度調節用及びトウミ風力調節用の各電動モータM5〜M7に対する駆動信号が出力されている。メータ用コントローラ7は、制御データを記憶する制御データ記憶手段としてのRAM等で構成されたメモリ7Aと、不揮発性のEEPROM等で構成されたメモリ7Bとを備えている。
【0029】
通常制御モードでは、メータ用コントローラ7及び制御ユニット8は、互いに通信しながら、各センサ類S1〜S9の検出情報や予め設定した制御目標値の情報等に基づいて、各アクチュエータM1〜M4や電動モータM5〜M7等を駆動して、前述の各制御(扱深さ制御、刈高制御、ローリング制御、選別制御、車速制御等)を実行する。つまり、メータ用コントローラ7と制御ユニット8とを利用して、後述の制御目標値設定手段101にて設定された制御目標値に基づいて、前記作動部の作動を制御する制御手段100が構成されている。
【0030】
表示パネルユニットCの表示画面1に対する制御と、キー入力部2,3,4の作動状態の検出は、メータ用コントローラ7にて行われ、通常制御モードでは、表示画面1に、燃料残量、アワーメータ(稼働時間)、エンジン回転数、負荷状態等の各種の稼働情報が切り換えて表示される。選択スイッチ2は、図4に示すように前述の各制御に対応する複数のスイッチを有し、通常制御モードでは、各制御の起動及び停止を指示するために使用され、作動中の制御に対応するスイッチを押すとその制御が停止され、停止中の制御に対応するスイッチを押すとその制御が起動される。
【0031】
一方、目標値設定モードでは、選択スイッチ2が押されると、その選択スイッチ2に対応する制御の制御目標値を設定できる状態になる。又、切換スイッチ3は、スイッチを押してアースに接続したオン状態と、スイッチを押さないオフ状態とに切換自在に構成され、スイッチを押してオンさせた状態で駆動電源を作動させた後、スイッチを離してオフさせると、メータ用コントローラ7が目標値設定モードに切り換えられる。尚、切換スイッチ3を押さない状態で駆動電源を作動させると、通常制御モードが起動する。
【0032】
刈取部12や変速装置33等の各作動部の制御目標値を設定する制御目標値設定手段101が、複数の作業条件の夫々(作物スイッチ6にて選択される稲、麦、大豆の各条件)についての前記複数の作動部の制御目標値を複数の作業条件の夫々と対応付けて設定自在に、かつ、設定された制御目標値を記憶自在に構成されると共に、複数の作業条件の夫々に対応する複数の作動部の制御目標値を制御手段100に択一的に出力自在に構成され、さらに、上記複数の作業条件の夫々についての制御目標値を、複数の作業者(例えば、作業者A,B,C)の夫々を識別するための識別データと対応付けて(例えば識別用のIDコードとして、作業者Aに「001」、作業者Bに「002」、作業者Cに「003」を付与して)設定して記憶すると共に、指示された識別データ(上記IDコード)に対応する制御目標値を制御手段100に出力するように構成されて設けられている。
【0033】
そのために、図5に示すように、制御目標値設定手段101が、制御目標値の情報を入力する目標値入力手段としての表示画面1及びキー入力部2,3,4と、制御目標値の情報を記憶する目標値記憶手段としての前記メモリ7Bと、前記識別データ(IDコード)を指示する識別データ指示手段5と、処理手段としてのメータ用コントローラ7とから構成されている。
【0034】
ここで、前記識別データ指示手段として、図4及び図5に示すように、IDコードを指示するための手動ダイヤル式のID設定器5が設けられ、1、2、3の番号が付された位置をマークに合わせると、所定の作業者のIDコードがメータ用コントローラ7に入力されるようになっている。
【0035】
表示画面1及びキー入力部2,3,4による制御目標値の入力について説明する。前述のように目標値設定モードに切り換えた状態で、作物スイッチ6にて稲、麦、大豆のいずれかの作業条件を選択してから、設定対象の制御を選択スイッチ2にて選択する。例えばASCスイッチを押すと、図6(イ)に示すように車速制御での最高車速の現在値がバーグラフ表示される。尚、バー1aの100%の位置は、最高車速値2.0m/secに対応する。現在値から増加させるときは変更スイッチ4のアップキー4aを押してバー1aを右側に移動させ、減少させるときはダウンキー4bを押してバー1aを左側に移動させる。尚、変更スイッチ4にて目標値を変更した後、設定時間(2秒)経過すると、変更後の値が現在記憶されている値と更新されてメモリ7Bに記憶される。
【0036】
又、AHCスイッチを押すと、図6(ロ)に示すように刈高さ制御における現在の設定刈高さの値がバーグラフ表示されるので、同様に変更スイッチ4のアップキー4a又はダウンキー4bを操作してバー1aを所望の位置に移動させて目標値を変更する。尚、上記表示画面1の左上には、作業者及び作物条件を確認するために、作業者名と作物名とが表示される。
【0037】
そして、処理手段としてのメータ用コントローラ7は、表示画面1及びキー入力部2,3,4にて入力された制御目標値の情報に識別データ指示手段5にて指示されたIDコードを付加した情報をメモリ7Bに記憶させる。具体的には、図7に示すように、各制御目標値は、作物スイッチ6にて選択された稲、麦又は大豆の各作物条件に対して各別に設定されるので、各作業者A,B,C毎に、各作物条件と対応付けて設定・記憶される。例えば、作業者Aに対して、最高車速の目標値が、稲ではs1、麦ではs2、大豆ではs3に設定され、刈高さの目標値は、稲ではk1、麦ではk2、大豆ではk3に設定されたとすると、作業者A用として、各目標値データs1,s2,s3,k1,k2,k3に、作業者AのIDコード「001」を付加したデータがメモリ7Bに記憶されることになる。
【0038】
又、処理手段としてのメータ用コントローラ7は、識別データ指示手段5にて指示されたIDコード(例えば、作業者Aでは「001」)に基づいてメモリ7Bから識別して読み出した制御目標値(例えば、各目標値データs1,s2,s3,k1,k2,k3)を制御手段100に出力するように構成されている。つまり、制御目標値設定手段101は、作動用電源が投入されるに伴って、メモリ7Bに記憶している制御目標値の情報を制御手段100に出力する。そして、制御手段100は、制御目標値設定手段101から受け取った制御目標値の情報を前記メモリ7Aに記憶させるように構成されている。
【0039】
〔別実施形態〕
上記実施例では、複数の作動条件の夫々に対する制御目標値として、稲、麦、大豆等の作物条件についての制御目標値を設定する場合について説明したが、このような作物条件に限るものではない。例えば、圃場の状態が乾田であるか、湿田であるか等の作業地条件の夫々について設定してもよい。
【0040】
上記実施例では、複数の作動部に対する制御目標値の設定の例として、車速制御での変速装置33に対する最高車速と、刈高制御での刈取部12に対する刈高さ設定について説明したが、これ以外に、例えば、ローリング制御での車体昇降速度や、選別制御でのチャフ開度及びトウミ風力の最大値や、グレンタンク15内の穀粒を排出するオーガの排出位置等を設定することもできる。
又、操縦部13に登るためのステップが可動式の場合に、そのステップの高さを運転開始後に自動調節するための目標高さを設定したり、あるいは、操縦部がエアコン付のキャビンタイプの場合に、そのエアコンの目標温度を設定する等、制御目標値の設定は、種々の作動部についての制御が対象となる。
【0042】
上記実施例では、識別データ指示手段5を手動ダイヤル式のID設定器5にて構成したが、これに限るものではなく、例えば、表示画面で確認しながらテンキーで入力した識別データを記憶し、その記憶データで指示してもよい。
又、識別データ指示手段5を、作動電源投入用のメインキー(エンジンスタートキー)に備えられて前記IDコードを微弱電波によって送信する送信部と、車体V側に備えられてキー側の送信部から送信されたIDコードを受信する受信部とにて構成した場合には、作業者がキーを挿入して作動電源を投入すると、メインキーから車体側に各作業者の識別データが自動的に指示されるので、識別データの指示を一層容易に行うことができるという効果が得られる。ここで、キー側の送信部は常に送信作動する構成の外に、キーを差し込むと電源供給されて送信作動する等、種々変更できる。さらに、電波ではなく、磁気信号によって識別データを送受信してもよい。
【0043】
目標値入力手段1〜4において、アップダウンキー4a,4bで現在記憶している目標値を変更するようにしたが、テンキー等で、目標値を直接入力するようにしてもよい。
【0044】
上記実施例では、本発明を、作業車としての農作業用のコンバインに適用したものを例示したが、コンバイン以外の農作業用の各種作業車や、土木作業車や建設作業車等にも適用できる。
【図面の簡単な説明】
【図1】コンバインの側面図
【図2】コンバインの脱穀部の側面透視図
【図3】コンバインの動力伝達図
【図4】コンバインに備えた表示パネルの正面図
【図5】コンバインの制御構成のブロック図
【図6】制御目標値の設定動作を示す表示画面の正面図
【図7】制御目標値の記憶手段を説明する概念図
【符号の説明】
1〜4 目標値入力手段
5 識別データ指示手段
7 処理手段
7A 制御データ記憶手段
7B 目標値記憶手段
12 作動部
33 作動部
100 制御手段
101 制御目標値設定手段
Claims (3)
- 作動部の制御目標値を設定する制御目標値設定手段と、
その制御目標値設定手段にて設定された制御目標値に基づいて、前記作動部の作動を制御する制御手段とが設けられた作業車の制御装置であって、
前記制御目標値設定手段が、複数の作業条件の夫々についての制御目標値を複数の作業条件の夫々と対応付けて設定自在に、かつ、設定された制御目標値を記憶自在に構成されると共に、複数の作業条件の夫々に対応する制御目標値を前記制御手段に択一的に出力自在に構成され、
前記制御目標値設定手段が、複数の作業者毎の、複数の作業条件の夫々についての制御目標値を、複数の作業者の夫々を識別するための識別データと対応付けて設定して記憶すると共に、指示された識別データに対応し、且つ、前記複数の作業条件のうちで選択された作業条件に対応する制御目標値を前記制御手段に出力するように構成され、
前記制御目標値設定手段が、制御目標値の情報を入力する目標値入力手段と、制御目標値の情報を記憶する目標値記憶手段と、前記識別データを指示する識別データ指示手段と、処理手段とを備えて構成され、
前記処理手段は、前記目標値入力手段にて入力された制御目標値の情報に前記識別データ指示手段にて指示された識別データを付加した情報を前記目標値記憶手段に記憶させると共に、前記識別データ指示手段にて指示された識別データに基づいて前記目標値記憶手段から識別して読み出した各作業者夫々の制御目標値を前記制御手段に出力するように構成されている作業車の制御装置。 - 前記制御手段に、制御データを記憶する制御データ記憶手段が備えられ、
前記制御目標値設定手段は、作動用電源が投入されるに伴って、記憶している制御目標値の情報を前記制御手段に出力し、
前記制御手段は、前記制御目標値設定手段から受け取った制御目標値の情報を前記制御データ記憶手段に記憶させるように構成されている請求項1記載の作業車の制御装置。 - 前記作動部が、複数設けられ、
前記制御目標値設定手段が、複数の作業条件の夫々についての前記複数の作動部の制御目標値を複数の作業条件の夫々と対応付けて設定して記憶すると共に、複数の作業条件の夫々に対応する前記複数の作動部の制御目標値を前記制御手段に出力するように構成されている請求項1又は2記載の作業車の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP05269897A JP3662089B2 (ja) | 1997-03-07 | 1997-03-07 | 作業車の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP05269897A JP3662089B2 (ja) | 1997-03-07 | 1997-03-07 | 作業車の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10248352A JPH10248352A (ja) | 1998-09-22 |
| JP3662089B2 true JP3662089B2 (ja) | 2005-06-22 |
Family
ID=12922117
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP05269897A Expired - Fee Related JP3662089B2 (ja) | 1997-03-07 | 1997-03-07 | 作業車の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3662089B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002315424A (ja) * | 2001-04-20 | 2002-10-29 | Yanmar Agricult Equip Co Ltd | 農作業機における制御装置 |
| JP2008184121A (ja) * | 2007-01-31 | 2008-08-14 | Iseki & Co Ltd | 作業車両 |
| JP2008265755A (ja) * | 2008-05-31 | 2008-11-06 | Iseki & Co Ltd | 無段変速装置の変速制御装置 |
| JP5763460B2 (ja) * | 2011-07-28 | 2015-08-12 | 株式会社クボタ | 作業車の情報表示装置 |
| US8626407B2 (en) | 2011-07-26 | 2014-01-07 | Kubota Corporation | Work vehicle |
| JP6275587B2 (ja) * | 2014-08-18 | 2018-02-07 | ヤンマー株式会社 | コンバイン |
-
1997
- 1997-03-07 JP JP05269897A patent/JP3662089B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10248352A (ja) | 1998-09-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3662089B2 (ja) | 作業車の制御装置 | |
| JP2008082283A (ja) | 作業機のエンジン制御装置 | |
| JP3520013B2 (ja) | 作業機械の表示装置 | |
| JP3310571B2 (ja) | 作業車の制御装置 | |
| JP2907647B2 (ja) | 作業機の表示装置 | |
| KR100193456B1 (ko) | 작업기계의 표시장치 | |
| JP2644390B2 (ja) | 作業機の操作装置 | |
| JP3249722B2 (ja) | 作業機械の表示装置 | |
| JP3478911B2 (ja) | 作業機械の制御装置 | |
| JP3761378B2 (ja) | 作業機械の表示装置 | |
| JP3294103B2 (ja) | 作業機械の表示装置 | |
| JP3332739B2 (ja) | 作業機械の表示装置 | |
| JP3236513B2 (ja) | 作業機械の検査システム | |
| JP3113507B2 (ja) | コンバイン | |
| JP3254388B2 (ja) | 作業機械の検査システム | |
| JP3302570B2 (ja) | 作業機械の検査システム | |
| JP2612384B2 (ja) | 作業機の操作装置 | |
| JP3310572B2 (ja) | コンバインの表示式操作案内装置 | |
| JP3447608B2 (ja) | 作業機械の制御装置 | |
| JP3294104B2 (ja) | コンバインの表示装置 | |
| JPH03259012A (ja) | 脱穀装置 | |
| JPH11220925A (ja) | 作業機械の制御装置 | |
| JPH11224120A (ja) | 作業機械の制御装置 | |
| JP3397594B2 (ja) | コンバインの制御装置 | |
| JP3332738B2 (ja) | 作業機械の表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040129 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040909 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050322 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090401 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100401 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110401 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120401 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120401 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130401 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130401 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140401 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |