JP2022012584A - 走行台車 - Google Patents
走行台車 Download PDFInfo
- Publication number
- JP2022012584A JP2022012584A JP2020114512A JP2020114512A JP2022012584A JP 2022012584 A JP2022012584 A JP 2022012584A JP 2020114512 A JP2020114512 A JP 2020114512A JP 2020114512 A JP2020114512 A JP 2020114512A JP 2022012584 A JP2022012584 A JP 2022012584A
- Authority
- JP
- Japan
- Prior art keywords
- traveling
- steering
- drive
- bogie
- horizontal axle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Handcart (AREA)
Abstract

【解決手段】
台車Pの下部に等間隔に設けられた、偶数本の垂直方向の垂直操舵軸11と、各垂直操舵軸11の軸下部から屈曲して設けられた、平面視外方への伸長方向へ伸長する水平車軸12と、各水平車軸12の先に取り付けられた、水平車軸周りに駆動可能な走行輪2と、前記走行輪2の水平車軸12の伸長方向を規制する規制機構4とを具備する。駆動した走行輪2Aが地面との反力によって駆動車軸の伸長方向たる操舵方向を可変させるものであり、隣り合う水平車軸2Aは互いに相反する方向へ、互いに相反する等しい回転位相だけ伸長方向たる操舵方向を可変させるよう制御することで、台車全体でモーメントが常に釣り合った状態で操舵方向を可変させる。
【選択図】図4
Description
(1)本発明に係る走行台車は、
台車Pの下部であって台車中心C周りに等間隔に設けられた、偶数本の垂直方向の操舵軸11と、
前記各垂直操舵軸11の軸下部から屈曲して設けられた、平面視外方への伸長方向へ伸長する車軸12と、
車軸12の先に取り付けられた走行輪2と、
前記走行輪2を車軸12周りに駆動させる駆動機構3と、
前記走行輪2の水平車軸12の伸長方向を規制する規制機構4と、を具備してなり、
走行輪2Aの駆動操舵軸11Aは台車中心C周りに平面視等間隔に設けられるとともに、
駆動機構3によって駆動した走行輪2Aが地面との反力によって駆動車軸の伸長方向(操舵方向)を可変させるものであり、
駆動機構3及び規制機構4によって、
隣り合う水平車軸2Aは互いに相反する方向へ、互いに相反する等しい回転位相だけ伸長方向(操舵方向)を可変させるよう制御することで、台車全体でモーメントが常に釣り合った状態で操舵方向を可変させることを特徴とする。
複数の水平車軸の伸長方向たる操舵方向を、ほぼ同じタイミングで、かつ同じ可変速度で可変させるよう、各走行輪の転動及び停止を同期制御することで、台車全体が地面に対して移動乃至回転することなく、各水平車軸の操舵方向を可変させることを特徴とする。
またさらに好ましくは、台車Pは矩形の辺縁PEを有した枠体又は板体からなり、走行輪2Aの駆動車軸の伸長方向に拘わらず、走行輪2Aの平面視外縁の1/3範囲が辺縁PEと一致することを特徴とする。
駆動操舵軸2Aに固定され、駆動操舵軸2Aの駆動方向変更と共に回転する回転係止器41と、
台車下部であって駆動操舵軸2Aの近傍に設けられ、各回転角度の回転係止器41に対向係止する対向係止器42と、から構成され、
回転形式41及び対向係止器42は、
突出制御される係止ピン42Pと、係止ピンに係止する係止溝を有した係止プレート41Pの一方及び他方からなり、隣り合う駆動操舵軸すべての係止ないし係止解除を同期制御することを特徴とする。
前記走行輪は、少なくとも、台車の前記略矩形形状の四隅の角部に配置され、
前記規制機構は、前記四隅の角部に配置された走行輪を、
各走行輪の外辺縁が前記略矩形形状の前後辺及び両側辺に対して並行な状態と、
各走行輪の外辺縁が前記略矩形形状の前後辺及び両側辺に対して斜めに交わる状態と、を維持するよう制御することを特徴とする。
またさらに好ましくは、前記台車Pの平面視四隅の台板P1には、水平に自由回転するローラー51を備えたガイドローラー51を、台板P11,12の角部から部分突出した状態で設けていることを特徴とする。
いずれの実施例においても、本発明に係る走行台車は、
台車Pの下部であって台車中心C周りに等間隔に設けられた、偶数本の垂直方向の操舵軸11と、
前記各垂直操舵軸11の軸下部から屈曲して設けられた、平面視外方への伸長方向へ伸長する車軸12と、
車軸12の先に取り付けられた走行輪2と、
(前記走行輪2のうち、全部又は一つ置きに隣り合って特定される複数の走行輪2を走行輪2Aとしたとき、)
前記走行輪2を車軸12周りに駆動させる駆動機構3と、
前記走行輪2の水平車軸12の伸長方向を規制する規制機構4と、を具備してなる。
駆動機構3によって駆動した走行輪2Aが地面との反力によって駆動車軸の伸長方向(操舵方向)を可変させるものであり、
駆動機構3及び規制機構4によって、
隣り合う水平車軸2Aは互いに相反する方向へ、互いに相反する等しい回転位相だけ伸長方向(操舵方向)を可変させるよう制御することで、台車全体でモーメントが常に釣り合った状態で操舵方向を可変させることを特徴とする。
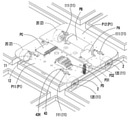
走行輪2は、各水平車軸12の先部である車軸先端12E周りに連結された、計4輪の走行車輪からなる。各走行輪2同士は同じ接地面を有する。走行輪2の、水平車軸12の先部への連結位置、すなわち垂直操舵軸11の中心からの距離は、車軸先端12Eによって調整される。この調整によって、図5、図7に示す第一、第三状態では車輪の外縁2Eのうち、少なくとも中央1/3部分の中央部2CEが台車の辺縁PEと平面視にて一致する位置となる。この中央部2CEは外縁2Eのうち接地面から反力を受ける中心部である。車軸先端12Eは平面視にて走行輪2の幅方向内部に位置しており、車軸先端12Eに連なる水平車軸12が駆動機構によって回転駆動することで走行輪2が転動する。このとき、接地面からうける反力モーメントは、隣接する走行輪2同士で打ち消されることで、いわゆる据え切り現象は発生しない。
一方、水平車軸12の変更時には、複数の走行輪2が同時に、かつ両側に隣接する走行輪2と異なる方向に同じタイミングで転動することで、隣接する走行輪2同士で、位相方向が対称に変位する。また走行時には、複数の走行輪2が同時に、かつ片側に隣接する自身と平行な走行輪2と同じ方向に転動することで、転動方向に台車走行させる。
規制機構4は少なくとも、水平車軸12と共に回転移動する回転係止器41と、台車Pの台板P1に固定された対向係止器42とからなる。対向係止器42は、回転移動する回転係止器41の各回転移動位置のうち、設定された複数の係止位置の近傍にそれぞれ係止可能に設置される。
一つの回転係止器41に対応する対向係止器42は一個または複数個のいずれでもよいが、例えば実施例1では、一つの回転係止器41に対応する対向係止器42が一個ずつ設けられる(図4、図5)。図4、図5では、鉛直操舵軸11の底面視中央寄り斜め方向(図示略45度方向)に一個の対向係止器42たる係止ピン4Nが、底面視斜め方向に突出入可能に設けられる。係止ピン4Nは、ボックス状のソレノイド4NH内に収容されると共に、コントロールボード及びターミナルリレーからの動作信号によってソレノイド4NHから往復一軸方向への突出入状態を維持するよう規制されている。
なお、本実施例のほかに、例えば対向係止器42が複数個設けられる場合は、回転位相上限の回転移動位置、回転位相下限の回転移動位置、回転位相中間(上限と下限を等分割した中間)の回転移動位置、のそれぞれの位置に1個ずつ設けられる。それぞれの位置に1個ずつ設けられた各対向係止器42は、
前記各回転移動位置それぞれの回転係止器41と対向係止可能となっており、水平車軸12の各回転位相のうち、所定の係止位相に回転移動した回転係止器41と対向して係止する。
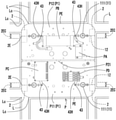
図4、図5に示す第一状態S1は、走行輪が台板P1の図示縦方向側辺と平行になると共に水平車軸12が平面視横方向を向いた、平面視縦方向すなわち図示上下方向への走行が可能な動作状態である。水平車軸12が平面視横方向を向いた第一状態(図4、図5)では回転位相上限の係止プレート4Tの一端(図示上端)の切欠き4TCに係止する。
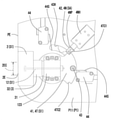
図6に示す第二状態S2は、台板P1の側辺に対して水平車軸12が45度の斜め角度になると共に、水平車軸12が平面視斜め方向を向いた、第一状態から第三状態までの中間位置の動作状態である。この第二状態は、係止ピン4Nの先端が係止プレート4Tの円弧辺に沿って摺接した状態であって、平面視斜め方向への走行が可能な動作状態でもある。なお図6に示す第二状態では係止ピン4Nはガイドピン43と接していない。
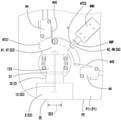
図7に示す第三状態S3は、走行輪が台板P1の図示横方向側辺と平行になると共に、水平車軸12が平面視縦方向を向いた、平面視横方向すなわち図示左右方向への走行が可能な動作状態である。水平車軸12が平面視縦方向を向いた第三状態(図7)では回転位相下限の係止プレート4Tの他端(図示下端)の切欠き4TCに係止する。
上記いずれの動作状態においても、実施例1では、平面視にて走行輪2の外縁2Eが、台板P1の辺縁PEと一致している。走行輪2の外縁2Eの中央三分の一部分が外縁中央部2ECであり、この外縁中央部2ECは台板P1の辺縁PE及びコーナー部と略一致したまま各動作状態となる。
上記各動作状態において、全走行輪2に一対一対応して各水平車軸12状に同軸配置された駆動機構3たるモーター32が軸回転駆動することで、水平操舵軸12及び係止プレート4Tが回転移動(操舵位相変化)して回転係止器と対向係止器とが係止状態となり、この係止状態のままさらに軸回転駆動することで走行輪2が走行する。
水平操舵軸12及び係止プレート4Tが前記回転移動(操舵位相変化)するとき、隣り合う走行輪2の駆動機構3が互いに反対の方向へ同じタイミングで回転駆動するよう、コントロールボードPCによって制御される。また、走行輪2は台車の中心からみて等位相間隔毎に、等距離を開けて同一半径の仮想円上に複数輪が設けられている。これによって、軸回転駆動により接地面から受ける反力に基づくモーメントが、隣り合う走行輪によって互いに打ち消されることとなる。
係止プレート4Tが係止状態となって前記回転移動を終了し、走行状態に移行する際には、ターミナルリレー及びコントロールボードによって各走行輪2の駆動機構3が回転駆動方向及び駆動トルクを可変するよう制御される。
水平車軸12が平行方向を向いた異軸上の平行位置関係にある一対同士の組では、互いに同じ方向へ同じタイミングで回転駆動するように制御される。
走行輪の走行と操舵軸の位相回転とを、走行輪2に一対一で同軸組み込みされた駆動機構3によって一括制御して行うことで、操舵軸の変更機構と走行機構とを別々に備える必要がなく、装置の軽量化、制御の簡便化、動作の機敏化を図ることができる。
実施例2のガイドローラー51のローラーはローラー軸52周りに自由回転可能となっている。実施例2の走行台車を、実施例1の図1や図3に示すガイドレールL内で走行させる際、ガイドレールLに対して台板が平面視にて回転方向に傾いたときに、ガイドローラー5がレールコーナーLCに接することで、台車の姿勢を、常にガイドレールLのレール方向と略平行なものに制御するものとしている。
前記各垂直操舵軸11の軸下部から屈曲して設けられた、平面視外方への伸長方向へ伸長する水平車軸12と、
各水平車軸12の先に取り付けられた、水平車軸周りに駆動可能な走行輪2と、
前記走行輪2を水平車軸12周りに駆動させる駆動機構3と、
前記走行輪2の水平車軸12の伸長方向を規制する規制機構4と、を具備してなり、
走行輪2Aの駆動操舵軸11Aは台車中心C周りに平面視等間隔にかつ平面視同一径の仮想円上に設けられるとともに、
駆動機構3によって駆動した走行輪2Aが地面との反力によって駆動車軸の伸長方向たる操舵方向を可変させるものであり、
駆動機構3及び規制機構4によって、
隣り合う水平車軸2Aは互いに相反する方向へ、互いに相反する等しい回転位相だけ伸長方向たる操舵方向を可変させるよう制御することで、台車全体でモーメントが常に釣り合った状態で操舵方向を可変させることを特徴とする。
台車下部であって駆動操舵軸2Aの近傍に設けられ、各回転角度の回転係止器41に対向係止する対向係止器42と、から構成され、
回転係止器41及び対向係止器42は、
突出制御される係止ピン42Pと、係止ピンに係止する係止溝を有した係止プレート41Pの一方及び他方からなり、隣り合う駆動操舵軸すべての係止ないし係止解除を同期制御することが好ましい。
複数の水平車軸の伸長方向たる操舵方向を、ほぼ同じタイミングで、かつ同じ可変速度で可変させるよう制御することで、台車全体が地面に対して移動乃至回転することなく、各水平車軸の操舵方向を可変させることを特徴とする。
前記走行輪は、少なくとも、台車の前記略矩形形状の四隅の角部に配置され、
前記規制機構は、前記四隅の角部に配置された走行輪を、
各走行輪の外辺縁が前記略矩形形状の前後辺及び両側辺に対して並行な状態と、
各走行輪の外辺縁が前記略矩形形状の前後辺及び両側辺に対して斜めに交わる状態と、を維持するよう制御することを特徴とする、請求項1,2,又は3のいずれかに記載の走行台車。
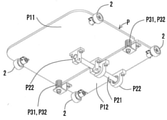
台板P1
第一台板P11、P12
辺縁PE
サスペンション軸P21
軸ホルダーP22
緩衝バネP31
鉤板P32
垂直操舵軸11
軸頭部111
軸カバー123
水平車軸12
走行輪2
外縁2E
外縁中央部2EC
駆動機構3
モーター軸31
モーター32
規制機構4
回転係止器41
対向係止器42
ガイドピン43
ガイド孔43H
リミットスイッチ44
スイッチセンサー44S
係止ピン4N
ソレノイド4NH
係止プレート4T
プレート切り欠き4TC
5 ガイドローラー
51 ローラー
52 ローラー軸
端子台PA
バッテリーPB
コントロールボードPC
ターミナルリレーPD
Claims (5)
- 台車の下部であって台車中心周りに等間隔に設けられた、偶数本の垂直方向の垂直操舵軸と、
前記各垂直操舵軸の軸下部から屈曲して設けられた、平面視外方への伸長方向へ伸長する水平車軸と、
各水平車軸の先に取り付けられた、水平車軸周りに駆動可能な走行輪と、
前記走行輪を水平車軸周りに駆動させる駆動機構と、
前記走行輪の水平車軸の伸長方向を規制する規制機構と、を具備してなり、
走行輪の駆動操舵軸は台車中心周りであって平面視同一径の仮想円上に設けられるとともに、
駆動機構によって駆動した走行輪が地面との反力によって駆動車軸の伸長方向たる操舵方向を可変させるものであり、
駆動機構及び規制機構によって、
隣り合う水平車軸は互いに相反する方向へ、互いに相反する等しい回転位相だけ伸長方向たる操舵方向を可変させるよう制御することで、台車全体でモーメントが常に釣り合った状態で操舵方向を可変させることを特徴とする走行台車。 - 前記駆動機構及び規制機構は、
複数の水平車軸の伸長方向たる操舵方向を、ほぼ同じタイミングで、かつ同じ可変速度で可変させるよう制御することで、台車全体が地面に対して移動乃至回転することなく、各水平車軸の操舵方向を可変させることを特徴とする、請求項1に記載の走行台車。 - 前記規制機構は、駆動操舵軸に固定され、駆動操舵軸の駆動方向変更と共に回転する回転係止器と、
台車下部であって駆動操舵軸の近傍に設けられ、各回転角度の回転係止器に対向係止する対向係止器と、から構成され、
回転係止器及び対向係止器は、
突出制御される係止ピンと、係止ピンに係止する係止溝を有した係止プレートの一方及び他方からなり、隣り合う駆動操舵軸すべての係止ないし係止解除を同期制御することを特徴とする、請求項1又は2に記載の走行台車。 - 前記台車は一又は複数の台板によって、前後辺と両側辺とが垂直に交わる略矩形形状をなし、
前記走行輪は、少なくとも、台車の前記略矩形形状の四隅の角部に配置され、
前記規制機構は、前記四隅の角部に配置された走行輪を、
各走行輪の外辺縁が前記略矩形形状の前後辺及び両側辺に対して並行な状態と、
各走行輪の外辺縁が前記略矩形形状の前後辺及び両側辺に対して斜めに交わる状態と、を維持するよう制御することを特徴とする、請求項1,2,又は3のいずれかに記載の走行台車。 - 前記台車はねじり方向に可変するサスペンション機構を有して連結された第一台板と第二台板とから構成され、サスペンション機構によって、走行輪が常に一定の接地力で接地するように規制することを特徴とする、請求項1,2,3,4,のいずれかに記載の走行台車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020114512A JP7511228B2 (ja) | 2020-07-01 | 2020-07-01 | 走行台車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020114512A JP7511228B2 (ja) | 2020-07-01 | 2020-07-01 | 走行台車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022012584A true JP2022012584A (ja) | 2022-01-17 |
| JP7511228B2 JP7511228B2 (ja) | 2024-07-05 |
Family
ID=80148786
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020114512A Active JP7511228B2 (ja) | 2020-07-01 | 2020-07-01 | 走行台車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7511228B2 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003182584A (ja) * | 2001-12-25 | 2003-07-03 | Hitachi Plant Eng & Constr Co Ltd | 操舵兼用駆動車輪機構および電動運搬台車 |
| JP2005306178A (ja) * | 2004-04-21 | 2005-11-04 | Symtec Hozumi:Kk | 無人搬送車 |
| JP2005306173A (ja) * | 2004-04-20 | 2005-11-04 | Nishikawa Rubber Co Ltd | 遮音性シート及びその固定方法 |
| JP2008137631A (ja) * | 2006-11-06 | 2008-06-19 | Mitsuba Corp | 電動キャスタ付き搬送車 |
| WO2019137468A1 (zh) * | 2018-01-12 | 2019-07-18 | 锥能机器人(上海)有限公司 | 一种全向移动小车 |
-
2020
- 2020-07-01 JP JP2020114512A patent/JP7511228B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003182584A (ja) * | 2001-12-25 | 2003-07-03 | Hitachi Plant Eng & Constr Co Ltd | 操舵兼用駆動車輪機構および電動運搬台車 |
| JP2005306173A (ja) * | 2004-04-20 | 2005-11-04 | Nishikawa Rubber Co Ltd | 遮音性シート及びその固定方法 |
| JP2005306178A (ja) * | 2004-04-21 | 2005-11-04 | Symtec Hozumi:Kk | 無人搬送車 |
| JP2008137631A (ja) * | 2006-11-06 | 2008-06-19 | Mitsuba Corp | 電動キャスタ付き搬送車 |
| WO2019137468A1 (zh) * | 2018-01-12 | 2019-07-18 | 锥能机器人(上海)有限公司 | 一种全向移动小车 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7511228B2 (ja) | 2024-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102264036B1 (ko) | 접지력이 향상된 구동바퀴를 구비한 agv | |
| US20230146720A1 (en) | Vehicle drive unit and vehicle with a vehicle drive unit | |
| JP7349110B1 (ja) | 無人搬送車 | |
| JP2018020665A (ja) | 自動車車体 | |
| JP2022012584A (ja) | 走行台車 | |
| WO2020059189A1 (ja) | 駆動輪、台車及び機器 | |
| WO2012008005A1 (ja) | 倒立振子型移動体および移動ロボット | |
| CN218876964U (zh) | 换电设备及换电站 | |
| JP6361124B2 (ja) | 無人搬送車 | |
| JP2013147313A (ja) | トレー送り式駐車装置 | |
| JP2008075351A (ja) | 車両移動装置 | |
| JP7415185B2 (ja) | 乗物用シート | |
| CN110802570A (zh) | 一种移动装置及建筑机器人 | |
| CN112793657B (zh) | 一种转向机构及移动装置 | |
| JP4788412B2 (ja) | 倒立振子型移動体 | |
| JP6922776B2 (ja) | ベッド搬送装置 | |
| JP7188697B2 (ja) | 運搬車 | |
| JP2022028343A (ja) | 走行装置 | |
| JP6906120B1 (ja) | 走行装置及び該走行装置を備えた無人搬送車 | |
| JP6042616B2 (ja) | トレー送り式駐車装置 | |
| JP7779238B2 (ja) | 搬送設備 | |
| KR19980058764U (ko) | 무인반송차 | |
| JP6914225B2 (ja) | 機械式駐車装置 | |
| KR101320957B1 (ko) | 주행방향이 직각으로 전환되는 수동대차 | |
| JP6920726B2 (ja) | 車椅子アタッチメント |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230623 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231114 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240313 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240606 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240618 |