JP2019124873A - 画像形成装置およびその制御方法 - Google Patents
画像形成装置およびその制御方法 Download PDFInfo
- Publication number
- JP2019124873A JP2019124873A JP2018006691A JP2018006691A JP2019124873A JP 2019124873 A JP2019124873 A JP 2019124873A JP 2018006691 A JP2018006691 A JP 2018006691A JP 2018006691 A JP2018006691 A JP 2018006691A JP 2019124873 A JP2019124873 A JP 2019124873A
- Authority
- JP
- Japan
- Prior art keywords
- scanning direction
- photosensitive member
- forming apparatus
- image forming
- main scanning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/04—Apparatus for electrographic processes using a charge pattern for exposing, i.e. imagewise exposure by optically projecting the original image on a photoconductive recording material
- G03G15/043—Apparatus for electrographic processes using a charge pattern for exposing, i.e. imagewise exposure by optically projecting the original image on a photoconductive recording material with means for controlling illumination or exposure
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/04—Apparatus for electrographic processes using a charge pattern for exposing, i.e. imagewise exposure by optically projecting the original image on a photoconductive recording material
- G03G15/041—Apparatus for electrographic processes using a charge pattern for exposing, i.e. imagewise exposure by optically projecting the original image on a photoconductive recording material with variable magnification
- G03G15/0415—Apparatus for electrographic processes using a charge pattern for exposing, i.e. imagewise exposure by optically projecting the original image on a photoconductive recording material with variable magnification and means for controlling illumination or exposure
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Facsimile Scanning Arrangements (AREA)
- Exposure Or Original Feeding In Electrophotography (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Control Or Security For Electrophotography (AREA)
- Laser Beam Printer (AREA)
Abstract
Description
図1は、本実施形態に係る画像形成装置9の概略的な構成図である。光走査装置(走査手段)400のレーザ駆動部300は、画像信号生成部100から出力される画像データに基づき、レーザ光(光)208を射出する。レーザ光208は、帯電部(不図示)により帯電された感光体4を走査・露光し、感光体4の表面に潜像を形成する。現像部(不図示)は、この潜像にトナー(現像剤)を付着させることで現像してトナー像を形成する。また、給紙ユニット8から給紙された記録媒体(例えば、紙)は、ローラ5により感光体4と転写ローラ41とのニップ領域に搬送される。転写ローラ41は、感光体4に形成されたトナー像を搬送されてきた記録媒体に転写する。記録媒体は、その後、定着部6に搬送される。定着部6は、記録媒体を加熱・加圧してトナー像を記録媒体に定着させる。トナー像が定着された記録媒体は、排紙ローラ7により画像形成装置9の外部に排出される。
図3は、本実施形態に係る像高と部分倍率との関係を示している。図3において、横軸が像高[mm]を示し、縦軸が部分倍率[%]を示す。なお、像高が0とは、スポットが結像レンズ406の光軸上にある場合であり、以下では「軸上像高」と呼ぶ。また、軸上像高以外の像高を以下では、「軸外像高」と呼ぶ。さらに、像高の絶対値の最大値を「最軸外像高」と呼ぶ。図2(A)に示す様に、被走査面407における最軸外像高の位置は中心からW/2である。図3において、例えば、像高の部分倍率が30%とは、当該像高における走査速度が、部分倍率が0%の像高における走査速度の1.3倍であることを意味している。図3の例では、軸上像高における走査速度が最も低く、像高の絶対値が大きくなる程、走査速度が速くなっている。従って、クロックの周期によって決めた一定の時間間隔で主走査方向の画素幅を決めてしまうと、軸上像高と軸外像高とで画素密度が異なってしまう。したがって、本実施形態では、部分倍率補正を行う。具体的には、像高に拘らず画素幅が略一定となる様に像高に応じてクロック周波数を調整する。なお、部分倍率補正の方法としては、クロック周波数を対象とした方法に限定するものではない。例えば、1画素未満のサイズから構成される画素片を主走査方向のいずれかの位置にて挿抜することで画素幅を調整するような方法であってもよい。
次に、図4、図5を用いて、輝度補正について説明する。
次に本実施形態に係る画像形成装置の画像処理の流れについて説明する。図6はプリント時の画像処理を説明するための機能ブロック図である。画像処理部101は、図6に示す濃度補正処理部101z、中間調処理部101a、位置制御部101b、及びPWM制御部101cを有し、以下に説明する画像処理を実行する。
PWM制御部101cによるPWM(Pulse Width Modulation)処理について説明する。図7は、位置制御部101bにより各画素に割り当てられたデータ(7ビット)と、PWM処理によって生成するパルス信号との関係を示すテーブルの一例を示す。このテーブルには、パルス信号の幅(PWM値)とパルスの位置に関する情報を備える。PWM制御部101cは、入力される画像データは各画素に割り当てられた7ビットのデータを、下位5ビットのデータ(レベル値:0〜31)、上位2ビットのデータ(位置制御データ:C、L、R)に分けてPWM処理を行い、パルス信号を生成する。
本実施形態に係る光走査装置400の被走査面407上におけるレーザスポット径は、軸上像高において60μm、最軸外像高において80μmである。上述したように、偏向器405と感光体4の被走査面407との距離は、偏向器405の主走査方向において端部側(最軸外像高)の方が遠いため、端部側になるに従ってスポット径が大きくなる。図8は、静止スポット光量プロファイルの例を示しており、縦軸が光量[arb]を示し、横軸が主走査方向位置[μm]を示す。また、図8中の実線は軸上像高における静止スポット光量プロファイルを示し、点線は最軸外像高における静止スポット光量プロファイルを示す。
図10は、本実施形態に係る感光体4(感光ドラム)の単位面積当たりのドラム面露光量とドラム電位の関係(E−V曲線)を示す。図10では、縦軸はドラム電位[−V]を示し、横軸はドラム面光量[μJ/cm2]を示す。図10に示すように、露光量が0、すなわち光源401が発光していない時の感光体4の表面電位は約−540Vであり、露光量を上げるほど、感光体4の電位は低く(絶対値は小さく)なる傾向がある。
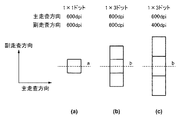
図9に示す積算光量プロファイルと図10に示すE−V曲線を元に算出した電位プロファイルを図11に示す。図11に示す各電位プロファイルにおいて、縦軸がドラム電位[−V]を示し、横軸が主走査方向位置[μm]を示す。図11(a)、(b)、(c)は、副走査方向の解像度が600dpiの場合の1×3ドット画像の軸上bの感光体4の表面電位のプロファイルを示す。一方、図11(d)、(e)、(f)は、副走査方向の解像度が400dpiの場合の電位プロファイルを示す。また、図11(a)、(d)は輝度がPの場合、図11(b)、(e)は輝度がP×1.5の場合、図11(c)、(f)は輝度がP×2.0の場合の各軸上における主走査方向の電位プロファイルをそれぞれ示している。
図12は、1×200ドットの縦線ライン画像を各主走査方向位置で印刷した際のライン幅の測定結果を示す。ここでのライン幅とは、主走査方向の1ドット(1画素)の長さに相当する。図12において、縦軸はライン幅測定結果[μm]を示し、横軸は主走査方向位置[mm]を示す。測定器としてはScanMateF10を使用した。本実施形態に係る結果1とともに、比較例として、比較例1、比較例2のライン幅測定結果も同様に示す。図12において(a)は、本実施形態の結果1としてのライン幅測定結果を示している。図12において(b)は比較例1としてのライン幅測定結果を示している。図12において(c)は比較例2としてのライン幅測定結果を示している。

第1実施形態においては入力画像データに応じて、PWM値を図7に示すように制御していた。これに対し、第2実施形態では、例えば、第1実施形態にて用いたPWM値をPWMとした場合、PWM値をPWM×400dpi/600dpi=PWM×2/3に制御する。例えば、第1実施形態のパルス信号のテーブルにおける最高画像階調(すなわち、レベル31)におけるPWM値は“255”であるのに対し、本実施形態のレベル31におけるPWM値は“170”である点が異なる。
発光時間:非発光時間=170:(255−170)=2:1
の比率で発光と非発光を1画素毎に繰り返す。これにより、例えば、最高画像階調における1画素に対する光量が“170”に相当する値となる。なお、1画素において、非発光動作と発光動作のいずれを先に行ってもよい。
第3実施形態として、副走査方向の画像解像度に応じて、PWM値を切り換える機能を有する実施形態について説明する。つまり、画像形成装置は、副走査方向の画像解像度を切り替えた複数のモードにて画像形成を行うことが可能であり、切り替えた際に、PWM値も切り替える構成とする。なお、第1、第2実施形態と同様の構成については、詳細な説明を省略する。
図17は、本実施形態に係るPWM値の切り替え処理を示すフローチャートである。本処理フローは、複数の処理部が連携して制御を行うため、ここでは、処理主体を画像形成装置9として説明する。
本発明は上述の実施形態の1以上の機能を実現するプログラムをネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (15)
- 感光体と、
前記感光体を帯電させる帯電手段と、
前記感光体の主走査方向の走査位置に応じてスポット径が異なるレーザ光により前記感光体を走査して潜像を形成する露光手段と、
前記潜像が形成された前記感光体にトナーを付着させて現像を行う現像手段と、
を有する画像形成装置であって、
前記感光体の主走査方向の走査位置に応じて、前記レーザ光の輝度と、前記感光体の副走査方向の解像度を制御する制御手段を備えることを特徴とする画像形成装置。 - 前記制御手段は、前記感光体の主走査方向の走査位置それぞれにおいて画素の幅が一定になるように、前記レーザ光の輝度と、前記感光体の副走査方向の解像度を制御することを特徴とする請求項1に記載の画像形成装置。
- 前記制御手段は、前記感光体の主走査方向の走査位置それぞれにおいて画素に対応するドットの幅が一定になるように、前記露光手段によるレーザ光の露光時間を制御することを特徴とする請求項1または2に記載の画像形成装置。
- 前記制御手段は、主走査方向における第1の走査位置に対する前記露光手段によるレーザ光の第1の露光時間より、主走査方向における前記第1の走査位置より前記感光体の中央部側である第2の走査位置に対する前記露光手段によるレーザ光の第2の露光時間が短くなるように制御することを特徴とする請求項1乃至3のいずれか一項に記載の画像形成装置。
- 前記制御手段は、主走査方向における第1の走査位置に対する前記露光手段によるレーザ光の第1の輝度より、主走査方向における前記第1の走査位置より前記感光体の中央部側である第2の走査位置に対する前記露光手段によるレーザ光の第2の輝度が低下するように制御することを特徴とする請求項1乃至3のいずれか一項に記載の画像形成装置。
- 前記制御手段は、APC(Auto Power Control)及び、予め保持された情報を用いて、主走査方向における前記第1の走査位置に対する前記第1の輝度より、主走査方向における前記第2の走査位置に対する前記第2の輝度が低下するように制御することを特徴とする請求項5に記載の画像形成装置。
- 前記制御手段は、前記感光体の副走査方向の解像度が主走査方向の解像度よりも低くなるように制御することを特徴とする請求項1乃至6のいずれか一項に記載の画像形成装置。
- 感光体と、
前記感光体を帯電させる帯電手段と、
前記感光体の主走査方向の走査位置に応じてスポット径が異なるレーザ光により前記感光体を走査して潜像を形成する露光手段と、
前記潜像が形成された前記感光体にトナーを付着させて現像を行う現像手段と、
を有する画像形成装置であって、
前記感光体の主走査方向における画素の位置ごとに、前記レーザ光の輝度と、前記レーザ光の発光時間とを制御する制御手段を備えることを特徴とする画像形成装置。 - 前記制御手段は、前記感光体の主走査方向の走査位置それぞれにおいて、対応する画像データの値に所定の比率の重み付けをした値に対応する光量となるように、前記レーザ光の発光時間を制御することを特徴とする請求項8に記載の画像形成装置。
- 前記制御手段は、前記感光体の主走査方向における画素ごとに前記所定の比率に基づく間隔で発光と非発光を繰り返すことにより、走査位置それぞれへの光量を制御することを特徴とする請求項9に記載の画像形成装置。
- 前記画像形成装置は、前記感光体の副走査方向の解像度を切り替えた複数のモードで画像形成を行うことが可能であり、
第1のモードの副走査方向の解像度がAであり、第2のモードの副走査方向の解像度がB(>A)であり、前記第1のモードのプロセススピードをPSとした場合、
前記第2のモードのプロセススピードをPS×A/Bとし、
前記第2のモードでは、前記感光体の主走査方向の走査位置それぞれにおいて、対応する画像データの値に(A/B)の重み付けをした値に対応する光量となるように、前記レーザ光の露光を制御することを特徴とする請求項1乃至7のいずれか一項に記載の画像形成装置。 - 前記制御手段は、前記感光体の主走査方向における画素ごとにA/B:{1−(A/B)}の比率の間隔で発光と非発光を繰り返すことにより、走査位置それぞれへの光量を制御することを特徴とする請求項11に記載の画像形成装置。
- 前記制御手段は、予め設定されたレーザ光の輝度がPである場合、前記第1または前記第2のモードにおいてレーザ光の輝度をP×B/Aとするように制御することを特徴とする請求項11または12に記載の画像形成装置。
- 感光体と、
前記感光体を帯電させる帯電手段と、
前記感光体の主走査方向の走査位置に応じてスポット径が異なるレーザ光により前記感光体を走査して潜像を形成する露光手段と、
前記潜像が形成された前記感光体にトナーを付着させて現像を行う現像手段と、
を有する画像形成装置の制御方法であって、
前記感光体の主走査方向の走査位置に応じて、前記レーザ光の輝度と、前記感光体の副走査方向の解像度を制御することを特徴とする画像形成装置の制御方法。 - 感光体と、
前記感光体を帯電させる帯電手段と、
前記感光体の主走査方向の走査位置に応じてスポット径が異なるレーザ光により前記感光体を走査して潜像を形成する露光手段と、
前記潜像が形成された前記感光体にトナーを付着させて現像を行う現像手段と、
を有する画像形成装置の制御方法であって、
前記感光体の主走査方向における画素の位置ごとに、前記レーザ光の輝度と、前記レーザ光の発光時間とを制御することを特徴とする画像形成装置の制御方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018006691A JP2019124873A (ja) | 2018-01-18 | 2018-01-18 | 画像形成装置およびその制御方法 |
| US16/247,395 US10520849B2 (en) | 2018-01-18 | 2019-01-14 | Image forming apparatus and control method thereof |
| JP2022200503A JP2023051967A (ja) | 2018-01-18 | 2022-12-15 | 画像形成装置およびその制御方法 |
| JP2024074509A JP2024100790A (ja) | 2018-01-18 | 2024-05-01 | 画像形成装置およびその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018006691A JP2019124873A (ja) | 2018-01-18 | 2018-01-18 | 画像形成装置およびその制御方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022200503A Division JP2023051967A (ja) | 2018-01-18 | 2022-12-15 | 画像形成装置およびその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019124873A true JP2019124873A (ja) | 2019-07-25 |
| JP2019124873A5 JP2019124873A5 (ja) | 2021-04-01 |
Family
ID=67213854
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018006691A Pending JP2019124873A (ja) | 2018-01-18 | 2018-01-18 | 画像形成装置およびその制御方法 |
| JP2022200503A Pending JP2023051967A (ja) | 2018-01-18 | 2022-12-15 | 画像形成装置およびその制御方法 |
| JP2024074509A Pending JP2024100790A (ja) | 2018-01-18 | 2024-05-01 | 画像形成装置およびその制御方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022200503A Pending JP2023051967A (ja) | 2018-01-18 | 2022-12-15 | 画像形成装置およびその制御方法 |
| JP2024074509A Pending JP2024100790A (ja) | 2018-01-18 | 2024-05-01 | 画像形成装置およびその制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10520849B2 (ja) |
| JP (3) | JP2019124873A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113284395B (zh) * | 2021-05-19 | 2022-12-02 | 山东电子职业技术学院 | 一种多媒体教学用的激光笔 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09323443A (ja) * | 1996-06-07 | 1997-12-16 | Canon Inc | Ledプリンタおよびledプリンタの濃度調整方法 |
| JP2006154337A (ja) * | 2004-11-30 | 2006-06-15 | Konica Minolta Business Technologies Inc | レーザー走査光学系 |
| JP2016000511A (ja) * | 2014-06-12 | 2016-01-07 | キヤノン株式会社 | 画像形成装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6125164A (ja) | 1984-07-13 | 1986-02-04 | Fujitsu Ltd | 印刷装置 |
| JPH05160965A (ja) * | 1991-12-04 | 1993-06-25 | Canon Inc | 画像記録装置 |
| JPH09141934A (ja) * | 1995-09-18 | 1997-06-03 | Ricoh Co Ltd | 画像記録装置 |
| JP2000108406A (ja) * | 1998-10-06 | 2000-04-18 | Canon Inc | 画像形成装置およびその制御方法 |
| JP2000351234A (ja) | 1999-06-11 | 2000-12-19 | Hitachi Koki Co Ltd | 電子写真装置のレーザ制御装置 |
| US7675532B2 (en) | 2007-09-28 | 2010-03-09 | Canon Kabushiki Kaisha | Image-forming apparatus and control method thereof |
| EP2955585B1 (en) | 2014-06-12 | 2020-10-28 | Canon Kabushiki Kaisha | Image-forming apparatus |
| JP6261452B2 (ja) * | 2014-06-12 | 2018-01-17 | キヤノン株式会社 | 画像形成装置 |
| JP6489861B2 (ja) * | 2015-02-19 | 2019-03-27 | キヤノン株式会社 | 画像形成装置 |
| JP6700744B2 (ja) | 2015-11-26 | 2020-05-27 | キヤノン株式会社 | 画像形成装置及びその制御方法 |
| JP6706144B2 (ja) | 2016-05-27 | 2020-06-03 | キヤノン株式会社 | 画像形成装置 |
| JP6836308B2 (ja) * | 2017-05-15 | 2021-02-24 | キヤノン株式会社 | 画像形成装置 |
-
2018
- 2018-01-18 JP JP2018006691A patent/JP2019124873A/ja active Pending
-
2019
- 2019-01-14 US US16/247,395 patent/US10520849B2/en active Active
-
2022
- 2022-12-15 JP JP2022200503A patent/JP2023051967A/ja active Pending
-
2024
- 2024-05-01 JP JP2024074509A patent/JP2024100790A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09323443A (ja) * | 1996-06-07 | 1997-12-16 | Canon Inc | Ledプリンタおよびledプリンタの濃度調整方法 |
| JP2006154337A (ja) * | 2004-11-30 | 2006-06-15 | Konica Minolta Business Technologies Inc | レーザー走査光学系 |
| JP2016000511A (ja) * | 2014-06-12 | 2016-01-07 | キヤノン株式会社 | 画像形成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023051967A (ja) | 2023-04-11 |
| US20190219942A1 (en) | 2019-07-18 |
| US10520849B2 (en) | 2019-12-31 |
| JP2024100790A (ja) | 2024-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6836308B2 (ja) | 画像形成装置 | |
| US9665031B2 (en) | Image forming apparatus that forms latent image by irradiating photosensitive member with light | |
| JP6261453B2 (ja) | 画像形成装置 | |
| JP2024100790A (ja) | 画像形成装置およびその制御方法 | |
| JP6706144B2 (ja) | 画像形成装置 | |
| US9091956B2 (en) | Image forming apparatus for performing exposure a plurality of times | |
| US20130127975A1 (en) | Image forming apparatus and image forming method | |
| JP6594142B2 (ja) | 画像形成装置、画像形成方法、およびプログラム | |
| JP7030889B2 (ja) | 画像形成装置 | |
| US10990029B2 (en) | Image forming apparatus correcting exposure amount of photosensitive member | |
| JP2008012852A (ja) | 画像形成装置 | |
| JP7570377B2 (ja) | 画像形成装置 | |
| JP6727913B2 (ja) | 画像形成装置 | |
| JP2018089866A (ja) | 画像形成装置および画像形成方法 | |
| JP6812216B2 (ja) | 画像形成装置 | |
| JP2018069682A (ja) | 画像形成装置 | |
| JP2018001588A (ja) | 画像形成装置 | |
| JP2020204702A (ja) | 画像形成装置 | |
| JP2017030309A (ja) | 画像形成装置、画像形成装置の制御方法 | |
| JP6740796B2 (ja) | 情報処理装置、画素設定方法、及び、プログラム | |
| JP2021151714A (ja) | 画像形成装置 | |
| JP2017223733A (ja) | 情報処理装置、画像形成装置、情報処理方法およびプログラム | |
| JP2017223732A (ja) | 画像形成装置および画像形成方法 | |
| JP2013141798A (ja) | 画像形成装置及び画像形成装置の制御方法 | |
| JP2017191208A (ja) | 画像形成装置、情報処理方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20210103 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210115 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210115 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211101 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220506 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220704 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220916 |