JP2019018301A - 電子機器組立装置及び電子機器組立方法 - Google Patents
電子機器組立装置及び電子機器組立方法 Download PDFInfo
- Publication number
- JP2019018301A JP2019018301A JP2017140517A JP2017140517A JP2019018301A JP 2019018301 A JP2019018301 A JP 2019018301A JP 2017140517 A JP2017140517 A JP 2017140517A JP 2017140517 A JP2017140517 A JP 2017140517A JP 2019018301 A JP2019018301 A JP 2019018301A
- Authority
- JP
- Japan
- Prior art keywords
- cable
- connector
- lock member
- electronic device
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R43/00—Apparatus or processes specially adapted for manufacturing, assembling, maintaining, or repairing of line connectors or current collectors or for joining electric conductors
- H01R43/26—Apparatus or processes specially adapted for manufacturing, assembling, maintaining, or repairing of line connectors or current collectors or for joining electric conductors for engaging or disengaging the two parts of a coupling device
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R43/00—Apparatus or processes specially adapted for manufacturing, assembling, maintaining, or repairing of line connectors or current collectors or for joining electric conductors
- H01R43/20—Apparatus or processes specially adapted for manufacturing, assembling, maintaining, or repairing of line connectors or current collectors or for joining electric conductors for assembling or disassembling contact members with insulating base, case or sleeve
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R12/00—Structural associations of a plurality of mutually-insulated electrical connecting elements, specially adapted for printed circuits, e.g. printed circuit boards [PCB], flat or ribbon cables, or like generally planar structures, e.g. terminal strips, terminal blocks; Coupling devices specially adapted for printed circuits, flat or ribbon cables, or like generally planar structures; Terminals specially adapted for contact with, or insertion into, printed circuits, flat or ribbon cables, or like generally planar structures
- H01R12/70—Coupling devices
- H01R12/7005—Guiding, mounting, polarizing or locking means; Extractors
- H01R12/7011—Locking or fixing a connector to a PCB
- H01R12/7017—Snap means
- H01R12/7023—Snap means integral with the coupling device
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R12/00—Structural associations of a plurality of mutually-insulated electrical connecting elements, specially adapted for printed circuits, e.g. printed circuit boards [PCB], flat or ribbon cables, or like generally planar structures, e.g. terminal strips, terminal blocks; Coupling devices specially adapted for printed circuits, flat or ribbon cables, or like generally planar structures; Terminals specially adapted for contact with, or insertion into, printed circuits, flat or ribbon cables, or like generally planar structures
- H01R12/70—Coupling devices
- H01R12/77—Coupling devices for flexible printed circuits, flat or ribbon cables or like structures
- H01R12/79—Coupling devices for flexible printed circuits, flat or ribbon cables or like structures connecting to rigid printed circuits or like structures
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R12/00—Structural associations of a plurality of mutually-insulated electrical connecting elements, specially adapted for printed circuits, e.g. printed circuit boards [PCB], flat or ribbon cables, or like generally planar structures, e.g. terminal strips, terminal blocks; Coupling devices specially adapted for printed circuits, flat or ribbon cables, or like generally planar structures; Terminals specially adapted for contact with, or insertion into, printed circuits, flat or ribbon cables, or like generally planar structures
- H01R12/70—Coupling devices
- H01R12/82—Coupling devices connected with low or zero insertion force
- H01R12/85—Coupling devices connected with low or zero insertion force contact pressure producing means, contacts activated after insertion of printed circuits or like structures
- H01R12/88—Coupling devices connected with low or zero insertion force contact pressure producing means, contacts activated after insertion of printed circuits or like structures acting manually by rotating or pivoting connector housing parts
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/53—Means to assemble or disassemble
- Y10T29/5313—Means to assemble electrical device
- Y10T29/532—Conductor
- Y10T29/53209—Terminal or connector
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/53—Means to assemble or disassemble
- Y10T29/5313—Means to assemble electrical device
- Y10T29/532—Conductor
- Y10T29/53209—Terminal or connector
- Y10T29/53213—Assembled to wire-type conductor
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Manufacturing Of Electrical Connectors (AREA)
- Manipulator (AREA)
Abstract
Description
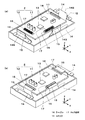
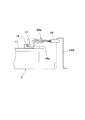
2 電子機器
14 ケーブル
16 コネクタ
17 ロック部材
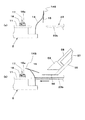
41 ケーブル保持部
42 ロック部材操作部
Claims (3)
- コネクタにケーブルを挿入して電子機器を組み立てる電子機器組立装置であって、
前記ケーブルを保持して前記コネクタに挿入するケーブル保持部と、
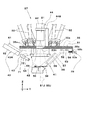
前記コネクタに挿入された前記ケーブルを前記コネクタにロックするロック部材と、
前記ケーブル保持部によって前記ケーブルが前記コネクタに挿入された後、前記ロック部材を操作して前記ケーブルを前記コネクタにロックするロック部材操作部とを備え、
前記ロック部材操作部は、前記コネクタに挿入された前記ケーブルが前記ケーブル保持部によって保持されている状態で前記ロック部材の操作を開始する電子機器組立装置。 - 前記ロック部材は、前記コネクタに対する開姿勢で前記ケーブルの挿入を受容し、前記コネクタに前記ケーブルが挿入された状態で閉姿勢になることで前記コネクタに前記ケーブルをロックする請求項1に記載の電子機器組立装置。
- コネクタにケーブルを挿入して電子機器を組み立てる電子機器組立方法であって、
ケーブル保持部に前記ケーブルを保持させるケーブル保持工程と、
前記ケーブル保持部に、前記ケーブル保持工程で保持させた前記ケーブルを前記コネクタに挿入させるケーブル挿入工程と、
前記ケーブル保持部が前記ケーブルを前記コネクタに挿入した後、ロック部材操作部によりロック部材を操作して前記ケーブルを前記コネクタにロックするロック部材操作工程とを含み、
前記ロック部材操作部による前記ロック部材の操作を、前記コネクタに挿入された前記ケーブルが前記ケーブル保持部によって保持されている状態で開始させる電子機器組立方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017140517A JP7050218B2 (ja) | 2017-07-20 | 2017-07-20 | 電子機器組立装置及び電子機器組立方法 |
| US16/032,094 US11038314B2 (en) | 2017-07-20 | 2018-07-11 | Electronic device assembling apparatus |
| CN201810763226.5A CN109286112B (zh) | 2017-07-20 | 2018-07-12 | 电子设备组装装置以及电子设备组装方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017140517A JP7050218B2 (ja) | 2017-07-20 | 2017-07-20 | 電子機器組立装置及び電子機器組立方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019018301A true JP2019018301A (ja) | 2019-02-07 |
| JP7050218B2 JP7050218B2 (ja) | 2022-04-08 |
Family
ID=65014127
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017140517A Active JP7050218B2 (ja) | 2017-07-20 | 2017-07-20 | 電子機器組立装置及び電子機器組立方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11038314B2 (ja) |
| JP (1) | JP7050218B2 (ja) |
| CN (1) | CN109286112B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020082228A (ja) * | 2018-11-16 | 2020-06-04 | セイコーエプソン株式会社 | ロボットシステムおよび接続方法 |
| JP7004939B1 (ja) | 2021-07-02 | 2022-01-21 | 株式会社不二越 | 電子機器組立装置および電子機器組立方法 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7181097B2 (ja) * | 2019-01-10 | 2022-11-30 | シャープ株式会社 | 台車及び搬送システム |
| US11341279B2 (en) | 2019-07-29 | 2022-05-24 | International Business Machines Corporation | Management of securable computing resources |
| US11341278B2 (en) | 2019-07-29 | 2022-05-24 | International Business Machines Corporation | Management of securable computing resources |
| US10916889B1 (en) | 2019-07-29 | 2021-02-09 | International Business Machines Corporation | Management of securable computing resources |
| US11531787B2 (en) | 2019-07-29 | 2022-12-20 | International Business Machines Corporation | Management of securable computing resources |
| US11669602B2 (en) | 2019-07-29 | 2023-06-06 | International Business Machines Corporation | Management of securable computing resources |
| US11210427B2 (en) | 2019-07-29 | 2021-12-28 | International Business Machines Corporation | Management of securable computing resources |
| CN110994321B (zh) * | 2019-12-30 | 2021-06-29 | 怀化学院 | 一种电子设备组装机 |
| CN110970780B (zh) * | 2019-12-30 | 2021-03-09 | 怀化学院 | 一种电子设备组装装置及组装方法 |
| CN113889824B (zh) * | 2020-07-01 | 2024-03-15 | 深圳市万普拉斯科技有限公司 | 扣合装置及扣合方法 |
| JP7037102B1 (ja) * | 2021-08-04 | 2022-03-16 | 株式会社不二越 | 電子機器組立方法 |
| KR20230039096A (ko) * | 2021-09-13 | 2023-03-21 | 삼성전자주식회사 | 전자 장치의 케이블 커넥터를 위한 조립 장치 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07245170A (ja) * | 1994-03-04 | 1995-09-19 | Sumitomo Wiring Syst Ltd | フラットケーブル用コネクタの嵌合治具 |
| JP2005011580A (ja) * | 2003-06-17 | 2005-01-13 | Fanuc Ltd | コネクタ把持装置、同装置を備えたコネクタ検査システム及びコネクタ接続システム |
| US20080168867A1 (en) * | 2007-01-12 | 2008-07-17 | Stefan Reker | Apparatus for fastening screw-threaded cable connections |
| JP2014176917A (ja) * | 2013-03-14 | 2014-09-25 | Yaskawa Electric Corp | ロボット装置 |
| JP2014231110A (ja) * | 2013-05-29 | 2014-12-11 | 本田技研工業株式会社 | コネクタ挿入方法及びコネクタ挿入装置 |
| US20160297075A1 (en) * | 2015-04-13 | 2016-10-13 | Daegu Gyeongbuk Institute Of Science And Technology | Gripping and assembling device for flexible object |
| JP2016209967A (ja) * | 2015-05-12 | 2016-12-15 | 富士通株式会社 | 把持装置及びフラットケーブル挿入装置 |
| WO2017046975A1 (ja) * | 2015-09-18 | 2017-03-23 | ソニー株式会社 | 取付装置、取付方法、及びハンド機構 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2596688Y2 (ja) * | 1992-08-14 | 1999-06-21 | 京セラエルコ株式会社 | 平板状接続部材のコネクタ装置 |
| JPH0696816A (ja) | 1992-09-14 | 1994-04-08 | Hitachi Ltd | ケーブル挿入治具 |
| JP2005056797A (ja) * | 2003-08-07 | 2005-03-03 | Jst Mfg Co Ltd | 電気コネクタ |
| JP4249789B2 (ja) * | 2007-07-23 | 2009-04-08 | ファナック株式会社 | 可撓性ワーク組付方法 |
| CN201556747U (zh) * | 2009-09-08 | 2010-08-18 | 达昌电子科技(苏州)有限公司 | 电连接器 |
| JP2013007938A (ja) * | 2011-06-27 | 2013-01-10 | Sumitomo Electric Ind Ltd | コネクタの引き抜き治具 |
| JP6002628B2 (ja) * | 2013-05-10 | 2016-10-05 | 矢崎総業株式会社 | 端子挿入装置及び端子挿入方法 |
| JP6164970B2 (ja) * | 2013-08-07 | 2017-07-19 | キヤノン株式会社 | ロボット制御方法、ロボットシステム、プログラム、記録媒体及び部品の製造方法 |
| CN103490192A (zh) * | 2013-09-18 | 2014-01-01 | 金工精密制造(深圳)有限公司 | 一种ffc接插件及其制造方法 |
| JP6500246B2 (ja) | 2016-11-02 | 2019-04-17 | パナソニックIpマネジメント株式会社 | 電子機器組立装置および電子機器組立方法 |
| US10804670B2 (en) | 2016-11-02 | 2020-10-13 | Panasonic Intellectual Property Management Co., Ltd. | Electronic equipment assembly apparatus and electronic equipment assembly method |
| JP6586644B2 (ja) | 2017-02-24 | 2019-10-09 | パナソニックIpマネジメント株式会社 | 電子機器製造装置および電子機器製造方法 |
-
2017
- 2017-07-20 JP JP2017140517A patent/JP7050218B2/ja active Active
-
2018
- 2018-07-11 US US16/032,094 patent/US11038314B2/en active Active
- 2018-07-12 CN CN201810763226.5A patent/CN109286112B/zh active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07245170A (ja) * | 1994-03-04 | 1995-09-19 | Sumitomo Wiring Syst Ltd | フラットケーブル用コネクタの嵌合治具 |
| JP2005011580A (ja) * | 2003-06-17 | 2005-01-13 | Fanuc Ltd | コネクタ把持装置、同装置を備えたコネクタ検査システム及びコネクタ接続システム |
| US20080168867A1 (en) * | 2007-01-12 | 2008-07-17 | Stefan Reker | Apparatus for fastening screw-threaded cable connections |
| JP2014176917A (ja) * | 2013-03-14 | 2014-09-25 | Yaskawa Electric Corp | ロボット装置 |
| JP2014231110A (ja) * | 2013-05-29 | 2014-12-11 | 本田技研工業株式会社 | コネクタ挿入方法及びコネクタ挿入装置 |
| US20160297075A1 (en) * | 2015-04-13 | 2016-10-13 | Daegu Gyeongbuk Institute Of Science And Technology | Gripping and assembling device for flexible object |
| JP2016209967A (ja) * | 2015-05-12 | 2016-12-15 | 富士通株式会社 | 把持装置及びフラットケーブル挿入装置 |
| WO2017046975A1 (ja) * | 2015-09-18 | 2017-03-23 | ソニー株式会社 | 取付装置、取付方法、及びハンド機構 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020082228A (ja) * | 2018-11-16 | 2020-06-04 | セイコーエプソン株式会社 | ロボットシステムおよび接続方法 |
| JP7225725B2 (ja) | 2018-11-16 | 2023-02-21 | セイコーエプソン株式会社 | ロボットシステムおよび挿入方法 |
| JP7004939B1 (ja) | 2021-07-02 | 2022-01-21 | 株式会社不二越 | 電子機器組立装置および電子機器組立方法 |
| WO2023276726A1 (ja) * | 2021-07-02 | 2023-01-05 | 株式会社不二越 | 電子機器組立装置および電子機器組立方法 |
| JP2023007743A (ja) * | 2021-07-02 | 2023-01-19 | 株式会社不二越 | 電子機器組立装置および電子機器組立方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109286112B (zh) | 2021-09-14 |
| JP7050218B2 (ja) | 2022-04-08 |
| US11038314B2 (en) | 2021-06-15 |
| US20190027887A1 (en) | 2019-01-24 |
| CN109286112A (zh) | 2019-01-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7050218B2 (ja) | 電子機器組立装置及び電子機器組立方法 | |
| US10770857B2 (en) | Electronic equipment assembly method | |
| US10826262B2 (en) | Electronic equipment assembly apparatus and electronic equipment assembly method | |
| JP6557866B2 (ja) | 電子機器組立装置および電子機器組立方法 | |
| US10804670B2 (en) | Electronic equipment assembly apparatus and electronic equipment assembly method | |
| JP6998503B2 (ja) | 電子機器組立装置及び電子機器組立方法 | |
| JP2018107068A (ja) | 電子機器組立方法 | |
| CN108512008B (zh) | 电子设备制造装置以及电子设备制造方法 | |
| JP6557867B2 (ja) | 電子機器組立装置 | |
| JP6688971B2 (ja) | 電子機器組立装置および電子機器組立方法 | |
| JP2019021555A (ja) | 電子機器組立装置及び電子機器組立方法 | |
| JPH0563396A (ja) | 電子部品挿入方法及び装置 | |
| JP6956312B2 (ja) | 電子機器組立装置及び電子機器組立方法 | |
| CN111474598A (zh) | 电子部件装载状态检测装置 | |
| JP2005166769A (ja) | 電子部品実装装置 | |
| US11154000B2 (en) | Substrate work machine | |
| JP7386385B2 (ja) | 電子機器組み立て装置および電子機器組み立て方法 | |
| JP2016189495A (ja) | ダイボンダおよびボンディングツールと半導体ダイとの相対位置の検出方法 | |
| JP6047723B2 (ja) | ダイボンダおよびボンディングツールと半導体ダイとの相対位置の検出方法 | |
| JP2019025595A (ja) | 電子機器組立装置及び電子機器組立方法 | |
| JP2000353900A (ja) | 電子部品の実装方法および位置認識用の標体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20190121 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200512 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210330 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210406 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210423 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220221 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7050218 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |