JP2018024079A - 測定機能を有する工作機械システム - Google Patents
測定機能を有する工作機械システム Download PDFInfo
- Publication number
- JP2018024079A JP2018024079A JP2017086852A JP2017086852A JP2018024079A JP 2018024079 A JP2018024079 A JP 2018024079A JP 2017086852 A JP2017086852 A JP 2017086852A JP 2017086852 A JP2017086852 A JP 2017086852A JP 2018024079 A JP2018024079 A JP 2018024079A
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- sensor
- light
- machine tool
- tool system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Constituent Portions Of Griding Lathes, Driving, Sensing And Control (AREA)
- Grinding And Polishing Of Tertiary Curved Surfaces And Surfaces With Complex Shapes (AREA)
- Machine Tool Sensing Apparatuses (AREA)
Abstract
Description
(1−1.研削盤1の概略構成)
以下、本発明に係る測定機能を有する工作機械システムの実施形態について、図面を参照しながら説明する。まず、図1を参照して、本発明の第一実施形態における工作機械システムとしての研削盤1の概略構成について説明する。
次に、図2及び図3を参照して、センサ100の構成を説明する。図2に示すように、センサ100は、本体110と、検出部120と、本体カバー140と、第一エア放出部150と、エア流路160と、第二エア放出部170と、風切板180と、を備える。
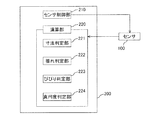
次に、図4を参照して、制御装置200について説明する。図4に示すように、制御装置200は、センサ制御部210と、演算部220とを備える。
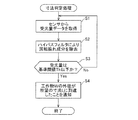
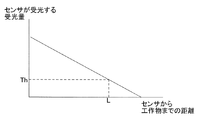
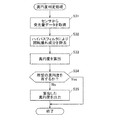
次に、図7A及び図7Bを参照して、寸法判定部221により実行される寸法判定処理について説明する。図7Aに示すように、寸法判定処理において、寸法判定部221は、センサ100から受光量データを取得し(S1)、ハイパスフィルタにより回転振れ成分を受光量データから除去する(S2)。その後、寸法判定処理は、回転振れ成分が除去された受光量データに基づき、センサ100が受光した受光量が基準閾値Th以下であるか否かを判定する(S3)。
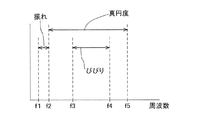
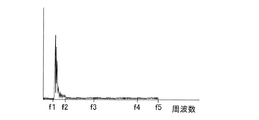
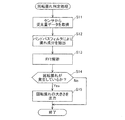
次に、図8を参照して、回転振れ判定部222により実行される回転振れ判定処理について説明する。図8に示すように、回転振れ判定処理において、回転振れ判定部222は、センサ100から受光量データを取得する(S11)。そして、回転振れ判定部222は、バンドパスフィルタにより回転振れ成分としての低周波成分(図5に示すf1からf2までにおける周波数成分)を受光量データから抽出し(S12)、FFT解析を行う(S13)。
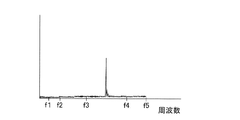
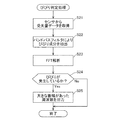
次に、図9を参照して、びびり判定部223により実行されるびびり判定処理について説明する。図9に示すように、びびり判定処理において、びびり判定部223は、センサ100から受光量データを取得する(S21)。そして、びびり判定部223は、バンドパスフィルタによりびびり成分としての高周波成分(図5に示すf3からf4までにおける周波数成分)を受光量データから抽出し(S22)、FFT解析を行う(S23)。
次に、図10を参照して、真円度判定部224により実行される真円度判定処理について説明する。図10に示すように、真円度判定処理において、真円度判定部224は、センサ100から受光量データを取得し(S31)、ハイパスフィルタにより回転振れ成分としての低周波成分を受光量データから除去する(S32)。その後、真円度判定部224は、回転振れ成分が除去された受光量データに基づき、工作物Wの真円度を算出する。
次に、図11から図13を参照して、第二実施形態について説明する。第一実施形態では、工作物Wが円筒形状である場合について説明したが、第二実施形態では、工作物Wがカムである。なお、上記した第一実施形態と同一の部品には同一の符号を付し、その説明を省略する。
まず、図11を参照して、第二実施形態における研削盤301の概略構成について説明する。図11に示すように、研削盤301は、エア供給装置80及びセンサ100の配置及び制御装置400を除き、第一実施形態における研削盤1(図1参照)と同等の構成を有する。
次に、図12を参照して、制御装置400について説明する。図12に示すように、制御装置400は、センサ制御部210と演算部420とを備え、演算部420は、カムプロフィール判定部421と、振れ判定部422とを備える。
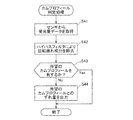
次に、図13を参照して、カムプロフィール判定部421により実行されるカムプロフィール判定処理について説明する。
以上、上記各実施形態に基づき本発明を説明したが、本発明は上記各形態に何ら限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々の変形改良が可能であることは容易に推察できるものである。例えば、本実施形態は、本発明が研削盤1,301に適用される場合を例に挙げて説明したが、研削盤1,301以外の工作機械に本発明を適用してもよい。
以上説明したように、本発明を適用した測定機能を有する工作機械システムとしての研削盤1,301は、工作物Wを回転可能に支持する工作物支持装置20と、工作物支持装置20に支持された工作物Wを加工する工具としての砥石車40と、工作物支持装置20に支持された工作物Wに向けて発光し、且つ、工作物Wの表面からの反射光を受光するセンサ100と、工作物Wを回転させた状態におけるセンサ100の受光量に基づいて工作物Wの形状情報を抽出する演算部220,420と、を備える。
Claims (8)
- 工作物を回転可能に支持する工作物支持装置と、
前記工作物支持装置に支持された前記工作物を加工する工具と、
前記工作物支持装置に支持された前記工作物に向けて発光し、且つ、前記工作物の表面からの反射光を受光するセンサと、
前記工作物を回転させた状態における前記センサの受光量に基づいて前記工作物の形状情報を抽出する演算部と、
を備える、測定機能を有する工作機械システム。 - 前記演算部は、前記センサの受光量に基づいて前記工作物との距離を抽出し、その抽出された距離に基づいて前記形状情報を抽出する、請求項1に記載の測定機能を有する工作機械システム。
- 前記演算部は、前記工作物に生じ得る回転振れ成分を抽出する、請求項1又は2に記載の測定機能を有する工作機械システム。
- 前記工作物は、円筒形状に形成され、
前記演算部は、前記工作物の回転位相に対する前記受光量の情報から前記工作物の回転振れ成分を除去し、前記形状情報として真円度成分を抽出する、請求項3に記載の測定機能を有する工作機械システム。 - 前記演算部は、前記受光量の情報から、前記回転振れとして低周波成分を除去し、前記真円度成分として高周波成分を抽出する、請求項4に記載の測定機能を有する工作機械システム。
- 前記演算部は、前記工作物に生じ得るびびり成分を抽出する、請求項1又は2に記載の測定機能を有する工作機械システム。
- 前記工作物は、カムであり、
前記演算部は、前記工作物を回転させつつ、前記センサをカム面に沿って移動させている状態における前記センサの受光量に基づいて、カムプロフィールの成分を抽出する、請求項1又は2に記載の測定機能を有する工作機械システム。 - 前記センサは、
基板と、
前記基板上に装着され、前記工作物に向けて発光する発光素子と、
前記基板上において前記発光素子の近傍に装着され、前記工作物からの反射光を受光可能な受光素子と、
を備える、請求項1−7の何れか一項に記載の測定機能を有する工作機械システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016156936 | 2016-08-09 | ||
| JP2016156936 | 2016-08-09 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018024079A true JP2018024079A (ja) | 2018-02-15 |
| JP2018024079A5 JP2018024079A5 (ja) | 2020-07-16 |
Family
ID=61193464
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017086852A Pending JP2018024079A (ja) | 2016-08-09 | 2017-04-26 | 測定機能を有する工作機械システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2018024079A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111300268A (zh) * | 2018-12-12 | 2020-06-19 | 阿加森机械制造股份有限公司 | 用于测量机加工工具的状态的工具装置以及方法 |
| JP2021079534A (ja) * | 2019-11-18 | 2021-05-27 | 株式会社ジェイテクト | 表面性状推定システム |
| WO2022163348A1 (ja) * | 2021-01-27 | 2022-08-04 | 株式会社ジェイテクト | 機上測定システム |
| JP2022114886A (ja) * | 2021-01-27 | 2022-08-08 | 株式会社ジェイテクト | 表面性状推定システム |
| CN117884952A (zh) * | 2023-12-26 | 2024-04-16 | 松德刀具(长兴)科技有限公司 | 一种智能化免拆装机床刀片槽加工在线监测装置及其检测方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5267081A (en) * | 1975-11-28 | 1977-06-03 | Toshiba Mach Co Ltd | Data processing system for treating a grinding chatter |
| JPS61186810A (ja) * | 1985-02-14 | 1986-08-20 | Omron Tateisi Electronics Co | 光学式微小距離測定方法 |
| JPS6368350A (ja) * | 1986-09-09 | 1988-03-28 | Toyoda Mach Works Ltd | カム研削盤 |
| JP2009009614A (ja) * | 2008-10-16 | 2009-01-15 | Jtekt Corp | 工作機械における部品寿命管理システム |
| JP2015100903A (ja) * | 2013-11-27 | 2015-06-04 | Dmg森精機株式会社 | 工作物測定装置および工作機械 |
-
2017
- 2017-04-26 JP JP2017086852A patent/JP2018024079A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5267081A (en) * | 1975-11-28 | 1977-06-03 | Toshiba Mach Co Ltd | Data processing system for treating a grinding chatter |
| JPS61186810A (ja) * | 1985-02-14 | 1986-08-20 | Omron Tateisi Electronics Co | 光学式微小距離測定方法 |
| JPS6368350A (ja) * | 1986-09-09 | 1988-03-28 | Toyoda Mach Works Ltd | カム研削盤 |
| JP2009009614A (ja) * | 2008-10-16 | 2009-01-15 | Jtekt Corp | 工作機械における部品寿命管理システム |
| JP2015100903A (ja) * | 2013-11-27 | 2015-06-04 | Dmg森精機株式会社 | 工作物測定装置および工作機械 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111300268A (zh) * | 2018-12-12 | 2020-06-19 | 阿加森机械制造股份有限公司 | 用于测量机加工工具的状态的工具装置以及方法 |
| CN111300268B (zh) * | 2018-12-12 | 2024-02-06 | 阿加森机械制造股份有限公司 | 用于测量机加工工具的状态的工具装置以及方法 |
| JP2021079534A (ja) * | 2019-11-18 | 2021-05-27 | 株式会社ジェイテクト | 表面性状推定システム |
| JP7491048B2 (ja) | 2019-11-18 | 2024-05-28 | 株式会社ジェイテクト | 表面性状推定システム |
| WO2022163348A1 (ja) * | 2021-01-27 | 2022-08-04 | 株式会社ジェイテクト | 機上測定システム |
| JP2022114895A (ja) * | 2021-01-27 | 2022-08-08 | 株式会社ジェイテクト | 機上測定システム |
| JP2022114886A (ja) * | 2021-01-27 | 2022-08-08 | 株式会社ジェイテクト | 表面性状推定システム |
| CN116529023A (zh) * | 2021-01-27 | 2023-08-01 | 株式会社捷太格特 | 在机测定系统 |
| JP7613133B2 (ja) | 2021-01-27 | 2025-01-15 | 株式会社ジェイテクト | 表面性状推定システム |
| JP7676788B2 (ja) | 2021-01-27 | 2025-05-15 | 株式会社ジェイテクト | 機上測定システム |
| CN117884952A (zh) * | 2023-12-26 | 2024-04-16 | 松德刀具(长兴)科技有限公司 | 一种智能化免拆装机床刀片槽加工在线监测装置及其检测方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109070297B (zh) | 机床系统以及表面粗糙度检测方法 | |
| JP2018024079A (ja) | 測定機能を有する工作機械システム | |
| US7495759B1 (en) | Damage and wear detection for rotary cutting blades | |
| JP6242619B2 (ja) | 加工装置 | |
| KR20170046572A (ko) | 절삭 장치 | |
| KR20180025233A (ko) | 편평한 피가공재의 두께 측정 방법 | |
| TW201901770A (zh) | 雷射加工方法 | |
| JP2015036170A (ja) | 研削装置 | |
| JP5991890B2 (ja) | ウエーハの加工方法 | |
| KR20180127910A (ko) | 절삭 장치의 절삭 블레이드 검출 기구 | |
| JP6888396B2 (ja) | 研削盤システム | |
| JP6938853B2 (ja) | 研削盤 | |
| JP6888397B2 (ja) | 工作機械システム | |
| JP6144545B2 (ja) | ウエハ面取り装置 | |
| JP6926626B2 (ja) | 研削盤システム | |
| JP6262593B2 (ja) | 研削装置 | |
| JP6774263B2 (ja) | 切削装置 | |
| JP2012148387A (ja) | 加工装置 | |
| JP2012111003A (ja) | 切削ブレード検出機構 | |
| JP6932979B2 (ja) | 工作機械システム | |
| JP2018024080A (ja) | 工作機械システムのクーラント液の汚濁評価装置 | |
| JP2017200722A (ja) | 研削盤システム | |
| JP5611012B2 (ja) | 切削ブレード検出機構 | |
| KR20230034147A (ko) | 연삭 장치 | |
| JP2017201309A (ja) | 表面粗さ検出方法及び工作機械システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200317 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200522 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210224 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20210301 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210824 |