JP6888397B2 - 工作機械システム - Google Patents
工作機械システム Download PDFInfo
- Publication number
- JP6888397B2 JP6888397B2 JP2017086851A JP2017086851A JP6888397B2 JP 6888397 B2 JP6888397 B2 JP 6888397B2 JP 2017086851 A JP2017086851 A JP 2017086851A JP 2017086851 A JP2017086851 A JP 2017086851A JP 6888397 B2 JP6888397 B2 JP 6888397B2
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- sensor
- surface roughness
- machine tool
- lapping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Constituent Portions Of Griding Lathes, Driving, Sensing And Control (AREA)
- Grinding Of Cylindrical And Plane Surfaces (AREA)
Description
(1.工作機械1の概略構成)
以下、本発明に係る工作機システムを適用した実施形態について、図面を参照して説明する。まず、図1を参照して、本発明の一実施形態における工作機械システムの概略構成について説明する。
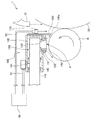
次に、図2及び図3を参照して、センサ100の構成を説明する。図2に示すように、センサ100は、本体110と、検出部120と、本体カバー140と、第一エア放出部150と、エア流路160と、第二エア放出部170と、風切板180と、を備える。
次に、図4を参照して、制御装置200について説明する。図4に示すように、制御装置200は、主軸制御部210と、ツルア制御部220と、研削制御部231及びラップ制御部232と、テーブル制御部240と、砥石台制御部250と、回転台制御部260と、加工条件決定部270と、を主に備える。
次に、研削工具51を用いて行う研削加工の流れについて説明する。ここでは、円筒状の工作物Wに対し、トラバース研削による研削加工を行う場合を例に挙げて説明する。研削加工を行う際、砥石台制御部250は、研削工具51の外周面が工作物Wと対向する位置に配置されるように回転機構41を制御し、回転台40を回転させる。
工作機械1は、研削工具51を用いた研削加工が終了した後、ラップ工具52を用いてラップ加工を行う。これに伴い、回転台制御部260は、回転機構41を駆動制御し、回転台50を180度回転させ、ラップ工具52の外周面を工作物Wに対向させる。
以上、上記実施形態に基づき本発明を説明したが、本発明は上記各形態に何ら限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々の変形改良が可能であることは容易に推察できるものである。
以上説明したように、本発明を適用した工作機械システムとしての工作機械1は、研削後の工作物Wにラップ加工を行う。工作機械システムは、工作物Wにラップ加工を行うラップ工具52と、工作物Wの表面粗さを検出するセンサ100と、センサ100により検出される表面粗さに基づいてラップ工具52によるラップ加工を行う制御装置200と、を備える。
Claims (6)
- 研削後の工作物にラップ加工を行う工作機械システムであって、
前記工作物を回転可能に支持する工作物支持装置と、
前記工作物支持装置に支持された前記工作物を研削する研削工具と、
前記工作物支持装置に支持された前記工作物にラップ加工を行うラップ工具と、
前記工作物の表面粗さを検出するセンサと、
前記センサにより検出される表面粗さに基づいて前記ラップ工具によるラップ加工を行う制御装置と、
を備える工作機械システム。 - 前記制御装置は、検出された前記表面粗さが所定閾値よりも小さくなった場合に、ラップ加工を終了する、請求項1に記載の工作機械システム。
- 前記制御装置は、
前記工作物の前記研削工具により研削された部位の前記表面粗さの検出、及び、前記工作物の前記ラップ工具によりラップ加工された部位の前記表面粗さの検出が、一の前記センサを用いて行われる、請求項1又は2に記載の工作機械システム。 - 前記工作機械システムは、複数の前記センサを備え、
前記複数のセンサは、
前記工作物の前記研削工具により研削された部位の前記表面粗さを検出する研削加工時用センサと、
前記工作物の前記ラップ工具によりラップ加工された部位の前記表面粗さを検出するラップ加工時用センサと、
を備える、請求項1又は2に記載の工作機械システム。 - 前記センサは、
基板と、
前記基板上に装着され、前記工作物に向けて発光する発光素子と、
前記基板上において前記発光素子の近傍に装着され、前記工作物からの反射光を受光可能な受光素子と、
を備える、請求項1−4の何れか一項に記載の工作機械システム。 - 前記工作機械システムは、
前記ラップ工具及び前記センサを備える複数の工作機械と、
前記複数の工作機械が接続されるネットワーク上に設けられる解析装置と、
前記センサにより検出される前記表面粗さに基づいて加工条件を決定する加工条件決定部と、
を備え、
前記加工条件決定部は、前記解析装置に設けられ、前記複数の工作機械における前記センサにより検出された前記表面粗さの解析結果に基づいて加工条件を決定する、請求項1−5の何れか一項に記載の工作機械システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016156935 | 2016-08-09 | ||
| JP2016156935 | 2016-08-09 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018024078A JP2018024078A (ja) | 2018-02-15 |
| JP2018024078A5 JP2018024078A5 (ja) | 2020-07-27 |
| JP6888397B2 true JP6888397B2 (ja) | 2021-06-16 |
Family
ID=61194023
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017086851A Active JP6888397B2 (ja) | 2016-08-09 | 2017-04-26 | 工作機械システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6888397B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109702495B (zh) * | 2019-02-18 | 2020-02-07 | 帅翼驰新材料集团有限公司 | 一种铝合金棒材的加工设备的工作方法 |
| JP2025079711A (ja) * | 2023-11-10 | 2025-05-22 | Jfeスチール株式会社 | 研削システム、研削方法及び鉄鋼製品の製造方法 |
| CN119973801A (zh) * | 2025-03-21 | 2025-05-13 | 陕西东川机电设备制造有限公司 | 一种阀门铜芯研磨装置 |
-
2017
- 2017-04-26 JP JP2017086851A patent/JP6888397B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018024078A (ja) | 2018-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109070297B (zh) | 机床系统以及表面粗糙度检测方法 | |
| JP7417400B2 (ja) | 円板状ワークの加工方法 | |
| CN1754658B (zh) | 使用旋转机床加工工件的加工装置 | |
| JP6803187B2 (ja) | 研削砥石のドレッシング方法 | |
| JP6441056B2 (ja) | 研削装置 | |
| CN107443249B (zh) | 研磨机系统 | |
| US11400563B2 (en) | Processing method for disk-shaped workpiece | |
| JP6888396B2 (ja) | 研削盤システム | |
| JP2016078147A (ja) | 研削装置 | |
| JP6888397B2 (ja) | 工作機械システム | |
| JP7127994B2 (ja) | ドレッシングボード及びドレッシング方法 | |
| JP2016016462A (ja) | 研削方法 | |
| JP2015036170A (ja) | 研削装置 | |
| JP6938853B2 (ja) | 研削盤 | |
| JP2018024079A (ja) | 測定機能を有する工作機械システム | |
| JP6751301B2 (ja) | 研削装置 | |
| JP6774263B2 (ja) | 切削装置 | |
| JP6926626B2 (ja) | 研削盤システム | |
| JP6932979B2 (ja) | 工作機械システム | |
| JP6938852B2 (ja) | 研削盤 | |
| JP7185446B2 (ja) | 被加工物の研削装置及び研削方法 | |
| JP2017201309A (ja) | 表面粗さ検出方法及び工作機械システム | |
| JP2012148387A (ja) | 加工装置 | |
| JP2017200722A (ja) | 研削盤システム | |
| JP6863040B2 (ja) | 研削盤システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200317 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200522 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210216 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20210301 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210323 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210420 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210503 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6888397 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |