JP2017223489A - 測量システム - Google Patents
測量システム Download PDFInfo
- Publication number
- JP2017223489A JP2017223489A JP2016117721A JP2016117721A JP2017223489A JP 2017223489 A JP2017223489 A JP 2017223489A JP 2016117721 A JP2016117721 A JP 2016117721A JP 2016117721 A JP2016117721 A JP 2016117721A JP 2017223489 A JP2017223489 A JP 2017223489A
- Authority
- JP
- Japan
- Prior art keywords
- tracking
- scanner
- target
- light
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/04—Adaptation of rangefinders for combination with telescopes or binoculars
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/66—Tracking systems using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/87—Combinations of systems using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
Abstract
Description
図1は第1の実施の形態に係る測量システムの外観斜視図である。図1における符号1が、本形態に係る測量システムである。測量システム1は、外観上は、測量機2と、スキャナ22を有する。符号9は、測量機2のターゲットであるプリズムである。
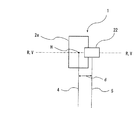
図4は第2の実施の形態に係る測量システム1の平面図である。第1の実施形態と同一の要素については同一の符号を用いて説明を割愛する。第2の実施形態では、スキャナの光軸5と追尾光の光軸4は平行で、スキャナの光軸5は測量機2の水平回転軸H-H上に無い。その代わり、スキャナ22は、スキャナの光軸5が追尾光の光軸4から水平方向に距離dだけオフセットするように、望遠鏡2aの上部に固定される。
第3の実施形態では、スキャナの光軸5は図3のように測量機2の水平回転軸H-H上とし、固定角θは0を含む任意の角度としてよい。第1の実施形態と同一の要素については同一の符号を用いて説明を割愛する。
トータルステーションである測量機2は、プリズム9の測距・測角値から、プリズム9の高度角を測定することができる。そこで、変形例1の測量システム1では、プリズム9の高度角を中心に鉛直方向上下に所定角拡張したエリア以外の点群データは、記憶部21に保存しないようにする。図6は変形例1を説明する図である。図6に示す矢印は、プリズム9の移動に伴いスキャンラインSLが移動する様子を示している。符号31はプリズム9の高度角に相当する位置の水平ラインを示しており、符号32は水平ライン31から鉛直方向に±α(数°〜数十°)拡張した水平ラインを示している。即ち、変形例1では、スキャンラインSLの軌跡と拡張した水平ライン32・32で囲まれる測定エリア(図6の斜線のエリア)の点群データを保存し、この測定エリア以外の点群データは保存しない。これにより、保存するデータ量を減らすことができる。なお、測定エリアの鉛直方向の範囲を規定するαは、上述のように角度でもよいし、例えば±1mなど、長さで設定されてもよい。長さの場合、距離に応じて角度が自動に決定されるように設定すればよい。
測量システム1では、スキャナ22のレーザ光線は、非可視光でも可視光でもよいが、非可視光の場合、照射点10が作業者には分からないという問題がある。そこで、スキャナの光軸5と水平方向に光軸を一致させた可視光のラインレーザを、例えば測量機2の本体下部に設けて、ガイド光として出射するのも好ましい。これにより、スキャン方向が作業者に明確となる。
測量システム1では、スキャナ22は鉛直方向に走査されるが、サンプリング位置が固定されていると、往復してスキャンを繰り返しても、鉛直角が同じ位置の点群データしか得られないおそれがある。そこで、走査の開始点を微小角ずつずらすのも好ましい。例えば、往復運動の折り返し時にスキャナ22のレーザ光の発光タイミングをランダムにずらす、または規則的に例えば0.5secずつずらしていけば、行きと帰りで走査のサンプリング位置(鉛直角)が異なるので、より緻密できれいに点群データを得ることができる。
2 測量機
2a 望遠鏡
4 追尾光の光軸
5 スキャナの光軸
7 追尾光の反射光の像
8 スキャナの反射光の像
9 プリズム(ターゲット)
10 照射点
17 演算制御部(追尾部)
18 追尾光送光部(追尾部)
19 追尾光受光部(追尾部)
20 測定部
21 記憶部
22 スキャナ
H-H線 測量機の水平回転軸
Claims (5)
- 追尾光を出射しターゲットで反射した前記追尾光を受光して前記ターゲットを追尾する追尾部を有する測量機と、
前記測量機と一体に水平回転し、一軸回りに鉛直方向に走査するスキャナと、を備え、
前記スキャナと前記追尾部は水平方向にオフセットされたことを特徴とする測量システム。
- 前記スキャナの光軸は、前記測量機の水平回転軸上にあり、前記追尾光の光軸から水平方向に固定角θだけオフセットされたこと特徴とする請求項1に記載の測量システム。
- 前記スキャナの光軸は、前記測量機の水平回転軸上になく、前記追尾部の光軸に対して水平方向に距離dだけオフセットされたこと特徴とする請求項1に記載の測量システム。
- 前記測量機は測距光を出射し前記ターゲットで反射した前記測距光を受光して前記ターゲットまでの測距および測角を行う測定部をさらに備え、前記スキャナの光軸は、前記測量機の水平回転軸上にあり、前記追尾部は追尾送光部と追尾受光部を備え、前記追尾光の反射光の像が常に前記追尾受光部の画像上の所定位置にくるように追尾し、前記スキャナの反射光の像は前記追尾受光部の画像上で前記所定位置から少なくとも水平方向にオフセットされた位置で検出すること特徴とする請求項1に記載の測量システム。
- 前記測量システムは測定した前記ターゲットの高度角付近の点群データ以外は取得しないこと特徴とする請求項1〜4のいずれかに記載の測量システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016117721A JP6713847B2 (ja) | 2016-06-14 | 2016-06-14 | 測量システム |
| US15/619,079 US10591290B2 (en) | 2016-06-14 | 2017-06-09 | Survey system |
| EP17175616.6A EP3258290B1 (en) | 2016-06-14 | 2017-06-13 | Survey system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016117721A JP6713847B2 (ja) | 2016-06-14 | 2016-06-14 | 測量システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017223489A true JP2017223489A (ja) | 2017-12-21 |
| JP6713847B2 JP6713847B2 (ja) | 2020-06-24 |
Family
ID=59055063
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016117721A Active JP6713847B2 (ja) | 2016-06-14 | 2016-06-14 | 測量システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10591290B2 (ja) |
| EP (1) | EP3258290B1 (ja) |
| JP (1) | JP6713847B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019113507A (ja) * | 2017-12-26 | 2019-07-11 | 株式会社トプコン | 測量装置、測量用制御装置、測量制御方法および測量制御処理用プログラム |
| JP2019128196A (ja) * | 2018-01-23 | 2019-08-01 | 株式会社トプコン | 測量装置および測量方法 |
| JP2020020747A (ja) * | 2018-08-03 | 2020-02-06 | 株式会社トプコン | レーザスキャナシステム |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3450915B1 (de) * | 2017-08-30 | 2020-11-25 | Hexagon Technology Center GmbH | Totalstation oder theodolit mit scanfunktionalität und einstellbaren empfangsbereichen des empfängers |
| JP7287793B2 (ja) * | 2019-02-26 | 2023-06-06 | 株式会社トプコン | ターゲット装置及び測量システム |
| JP7234011B2 (ja) * | 2019-04-02 | 2023-03-07 | 株式会社トプコン | 位置情報表示装置および測量システム |
| JP7299669B2 (ja) * | 2019-08-28 | 2023-06-28 | 株式会社トプコン | ガイド光照射部を備えた測量機 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11236716A (ja) * | 1997-11-10 | 1999-08-31 | Topcon Corp | 建設作業機械の自動コントロールシステム |
| US20090168045A1 (en) * | 2007-12-28 | 2009-07-02 | Industrial Technology Research Institute | Three-dimensional surround scanning device and method thereof |
| JP2009229192A (ja) * | 2008-03-21 | 2009-10-08 | Topcon Corp | 測量機、測量システム、測定対象の検出方法、および測定対象の検出プログラム |
| JP2012047656A (ja) * | 2010-08-30 | 2012-03-08 | Hitachi Ltd | レーザスキャナを用いた形状計測方法 |
| JP2012530909A (ja) * | 2009-06-23 | 2012-12-06 | ライカ・ジオシステムズ・アクチェンゲゼルシャフト | 追跡方法、および、レーザートラッカを有する測定システム |
| JP2013190272A (ja) * | 2012-03-13 | 2013-09-26 | Kyushu Univ | 3次元レーザ測量装置及び3次元レーザ測量方法 |
| US20140300886A1 (en) * | 2013-04-05 | 2014-10-09 | Leica Geosystems Ag | Geodetic referencing of point clouds |
| US20140307252A1 (en) * | 2013-04-12 | 2014-10-16 | Hexagon Technology Center Gmbh | Surveying device |
| US20150098075A1 (en) * | 2013-10-09 | 2015-04-09 | Hexagon Technology Center Gmbh | Scanner for space measurement |
| JP2015125099A (ja) * | 2013-12-27 | 2015-07-06 | 株式会社トプコン | 測量装置 |
| JP2016095150A (ja) * | 2014-11-12 | 2016-05-26 | 株式会社トプコン | 傾斜検出システム及び傾斜検出方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63287063A (ja) | 1987-05-19 | 1988-11-24 | Nec Corp | 半導体装置の製造方法 |
| JP5057734B2 (ja) | 2006-09-25 | 2012-10-24 | 株式会社トプコン | 測量方法及び測量システム及び測量データ処理プログラム |
| JP5150329B2 (ja) | 2008-03-26 | 2013-02-20 | 株式会社トプコン | 測量装置及び測量システム |
| EP2620745A1 (de) * | 2012-01-30 | 2013-07-31 | Hexagon Technology Center GmbH | Vermessungssystem mit einem Vermessungsgerät und einem Scanmodul |
| US9746560B2 (en) | 2013-02-12 | 2017-08-29 | Faro Technologies, Inc. | Combination scanner and tracker device having a focusing mechanism |
| EP3265885A4 (en) * | 2015-03-03 | 2018-08-29 | Prenav Inc. | Scanning environments and tracking unmanned aerial vehicles |
-
2016
- 2016-06-14 JP JP2016117721A patent/JP6713847B2/ja active Active
-
2017
- 2017-06-09 US US15/619,079 patent/US10591290B2/en active Active
- 2017-06-13 EP EP17175616.6A patent/EP3258290B1/en active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11236716A (ja) * | 1997-11-10 | 1999-08-31 | Topcon Corp | 建設作業機械の自動コントロールシステム |
| US20090168045A1 (en) * | 2007-12-28 | 2009-07-02 | Industrial Technology Research Institute | Three-dimensional surround scanning device and method thereof |
| JP2009229192A (ja) * | 2008-03-21 | 2009-10-08 | Topcon Corp | 測量機、測量システム、測定対象の検出方法、および測定対象の検出プログラム |
| JP2012530909A (ja) * | 2009-06-23 | 2012-12-06 | ライカ・ジオシステムズ・アクチェンゲゼルシャフト | 追跡方法、および、レーザートラッカを有する測定システム |
| JP2012047656A (ja) * | 2010-08-30 | 2012-03-08 | Hitachi Ltd | レーザスキャナを用いた形状計測方法 |
| JP2013190272A (ja) * | 2012-03-13 | 2013-09-26 | Kyushu Univ | 3次元レーザ測量装置及び3次元レーザ測量方法 |
| US20140300886A1 (en) * | 2013-04-05 | 2014-10-09 | Leica Geosystems Ag | Geodetic referencing of point clouds |
| US20140307252A1 (en) * | 2013-04-12 | 2014-10-16 | Hexagon Technology Center Gmbh | Surveying device |
| US20150098075A1 (en) * | 2013-10-09 | 2015-04-09 | Hexagon Technology Center Gmbh | Scanner for space measurement |
| JP2015125099A (ja) * | 2013-12-27 | 2015-07-06 | 株式会社トプコン | 測量装置 |
| JP2016095150A (ja) * | 2014-11-12 | 2016-05-26 | 株式会社トプコン | 傾斜検出システム及び傾斜検出方法 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019113507A (ja) * | 2017-12-26 | 2019-07-11 | 株式会社トプコン | 測量装置、測量用制御装置、測量制御方法および測量制御処理用プログラム |
| JP7060377B2 (ja) | 2017-12-26 | 2022-04-26 | 株式会社トプコン | 測量装置、測量用制御装置、測量制御方法および測量制御処理用プログラム |
| JP2019128196A (ja) * | 2018-01-23 | 2019-08-01 | 株式会社トプコン | 測量装置および測量方法 |
| JP7022601B2 (ja) | 2018-01-23 | 2022-02-18 | 株式会社トプコン | 測量装置および測量方法 |
| JP2020020747A (ja) * | 2018-08-03 | 2020-02-06 | 株式会社トプコン | レーザスキャナシステム |
| JP7120723B2 (ja) | 2018-08-03 | 2022-08-17 | 株式会社トプコン | レーザスキャナシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170356741A1 (en) | 2017-12-14 |
| EP3258290A1 (en) | 2017-12-20 |
| JP6713847B2 (ja) | 2020-06-24 |
| EP3258290B1 (en) | 2021-08-25 |
| US10591290B2 (en) | 2020-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017223489A (ja) | 測量システム | |
| EP3264134B1 (en) | Laser scanner system and registration method of point cloud data | |
| JP6877946B2 (ja) | レーザスキャナ | |
| JP6963936B2 (ja) | 測量システム | |
| EP3514489B1 (en) | Surveying device and surveying method | |
| JP4177765B2 (ja) | 測量システム | |
| JP2013190272A (ja) | 3次元レーザ測量装置及び3次元レーザ測量方法 | |
| JP2017223540A (ja) | 測量システム | |
| US9106805B2 (en) | Image measuring system | |
| JP6786325B2 (ja) | 測量装置および測定方法 | |
| US20200105043A1 (en) | Point cloud data display system | |
| JP7313955B2 (ja) | 測量装置、測量方法および測量用プログラム | |
| JP6680628B2 (ja) | レーザスキャナ | |
| JP2018009957A (ja) | 三次元位置計測システム,三次元位置計測方法,および計測モジュール | |
| JP7448397B2 (ja) | 測量装置及び測量システム | |
| JP2017223608A (ja) | 測量装置 | |
| US20210080577A1 (en) | Three-dimensional survey apparatus, three-dimensional survey method, and three-dimensional survey program | |
| JP6749191B2 (ja) | スキャナ装置および測量装置 | |
| US11692823B2 (en) | Three-dimensional survey apparatus, three-dimensional survey method, and three-dimensional survey program | |
| JP7314447B2 (ja) | スキャナシステム及びスキャン方法 | |
| JP2018048868A (ja) | スキャナ装置および測量装置 | |
| JP6913422B2 (ja) | 測量システム | |
| JP2021067615A (ja) | スキャナシステムおよびスキャン方法 | |
| US10895456B1 (en) | Three-dimensional survey apparatus, three-dimensional survey method, and three-dimensional survey program | |
| JP6423032B2 (ja) | 3次元測量装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190307 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200603 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200604 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6713847 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |