JP2017209070A - 作業車及び作業車に適用される時間ベース管理システム - Google Patents
作業車及び作業車に適用される時間ベース管理システム Download PDFInfo
- Publication number
- JP2017209070A JP2017209070A JP2016105365A JP2016105365A JP2017209070A JP 2017209070 A JP2017209070 A JP 2017209070A JP 2016105365 A JP2016105365 A JP 2016105365A JP 2016105365 A JP2016105365 A JP 2016105365A JP 2017209070 A JP2017209070 A JP 2017209070A
- Authority
- JP
- Japan
- Prior art keywords
- travel
- work
- time
- travel time
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004364 calculation method Methods 0.000 claims abstract description 35
- 230000005856 abnormality Effects 0.000 claims 1
- 238000012545 processing Methods 0.000 description 14
- 238000004891 communication Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 238000003971 tillage Methods 0.000 description 3
- 241000209094 Oryza Species 0.000 description 2
- 235000007164 Oryza sativa Nutrition 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000009313 farming Methods 0.000 description 2
- 235000009566 rice Nutrition 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 239000003337 fertilizer Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000005283 ground state Effects 0.000 description 1
- 238000003306 harvesting Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 239000010902 straw Substances 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0217—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with energy consumption, time reduction or distance reduction criteria
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/007—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow
- A01B69/008—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow automatic
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/007—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2087—Control of vehicle steering
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0088—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0219—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory ensuring the processing of the whole working surface
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0278—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using satellite positioning signals, e.g. GPS
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/205—Remotely operated machines, e.g. unmanned vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mechanical Engineering (AREA)
- Soil Sciences (AREA)
- Environmental Sciences (AREA)
- Mining & Mineral Resources (AREA)
- Structural Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Civil Engineering (AREA)
- Business, Economics & Management (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Guiding Agricultural Machines (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
〔別実施の形態〕
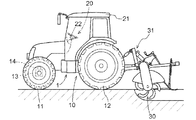
10 :走行機構
4 :制御ユニット
40 :走行制御部
41 :手動走行制御部
42 :自動走行制御部
50 :作業管理部
501 :進捗度算出部
502 :スリップ率算出部
51 :走行距離算出部
52 :走行時間算出部
54 :作業制御部
55 :記録部
56 :報知部
61 :経路設定部
62 :目標走行時間設定部
63 :経路生成部
7 :出力処理部
70 :通信処理部
73 :報知デバイス
8 :入力処理部
80 :衛星測位モジュール
Claims (12)
- 走行機構を装備する車体と、
前記車体に装備され、作業地に対する対地作業を行う作業装置と、
測位データを出力する衛星測位モジュールと、
前記測位データに基づいて前記車体の走行距離を算出する走行距離算出部と、
前記走行距離算出部で算出された走行距離の走行に要した時間から実距離走行時間を算出する走行時間算出部と、
前記実距離走行時間に基づいて前記対地作業を管理する作業管理部と、
を備えた作業車。 - 前記作業地に対する対地作業の目標走行時間を設定する目標走行時間設定部が備えられ、前記作業管理部は、前記目標走行時間と前記実距離走行時間とを比較して、前記対地作業の進捗度を算出する請求項1に記載の作業車。
- 前記進捗度が走行中に報知可能である請求項2に記載の作業車。
- 前記目標走行時間と前記実距離走行時間との時間ずれが所定時間を超えた場合、緊急停止指令が出力される請求項2または3に記載の作業車。
- 前記作業管理部は、直進走行時における前記目標走行時間と前記実距離走行時間との時間ずれである直進時間ずれと、旋回走行時における前記目標走行時間と前記実距離走行時間との時間ずれである旋回時間ずれとを算出する請求項2から4のいずれか一項に記載の作業車。
- 前記目標走行時間と前記実距離走行時間との時間ずれに基づいて前記車体のスリップ率を算出するスリップ率算出部が備えられている請求項2から4のいずれか一項に記載の作業車。
- 前記スリップ率算出部は、直進走行時における前記目標走行時間と前記実距離走行時間との時間ずれから直進走行時のスリップ率である直進スリップ率を算出するとともに、旋回走行時における前記目標走行時間と前記実距離走行時間との時間ずれから旋回走行時のスリップ率である旋回スリップ率を算出する請求項6に記載の作業車。
- 前記作業管理部で管理される管理情報をデータ転送可能に記録する記録部と、前記管理情報を報知する報知部が備えられている請求項1から7のいずれか一項に記載の作業車。
- 前記作業地における前記車体の目標走行経路を設定する経路設定部と、前記目標走行経路及び前記測位データに基づいて前記車体を自動走行させる自動走行指令を生成する自動走行制御部が備えられている請求項1から8のいずれか一項に記載の作業車。
- 走行機構を装備する車体に対地作業を行う作業装置を装備した作業車のための時間ベース管理システムであって、
前記作業車による作業走行のための目標走行経路を設定する経路設定部と、
前記目標走行経路に沿って設定された複数の作業走行点に目標走行時間を割り当てる目標走行時間設定部と、
前記作業車の実際の作業走行時の前記作業走行点における経過時間を実走行時間として算出する走行時間算出部と、
前記作業走行点における前記目標走行時間と前記実走行時間とを比較評価する作業管理部と、
を備えた作業車のための時間ベース管理システム。 - 前記目標走行時間と前記実走行時間との相違を示す相違値が、所定のしきい値を超えた場合、作業走行異常が報知される請求項10に記載の作業車のための時間ベース管理システム。
- 前記車体のスリップ率を算出するスリップ率算出部が備えられ、かつ
前記目標走行時間と前記実走行時間との相違を示す相違値が、所定のしきい値を超えた場合、前記相違に対する前記スリップ率の影響が評価される請求項10または11に記載の作業車のための時間ベース管理システム。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016105365A JP6697955B2 (ja) | 2016-05-26 | 2016-05-26 | 作業車及び作業車に適用される時間ベース管理システム |
| EP16903212.5A EP3466232B1 (en) | 2016-05-26 | 2016-12-06 | Work vehicle and time-based management system applicable to the work vehicle |
| CN201680084238.4A CN109068576B (zh) | 2016-05-26 | 2016-12-06 | 作业车及在作业车中应用的基于时间的管理系统 |
| PCT/JP2016/086232 WO2017203733A1 (ja) | 2016-05-26 | 2016-12-06 | 作業車及び作業車に適用される時間ベース管理システム |
| US16/093,678 US11144061B2 (en) | 2016-05-26 | 2016-12-06 | Work vehicle and time-based management system applicable to the work vehicle |
| JP2020077587A JP6972225B2 (ja) | 2016-05-26 | 2020-04-24 | 時間ベース管理システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016105365A JP6697955B2 (ja) | 2016-05-26 | 2016-05-26 | 作業車及び作業車に適用される時間ベース管理システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020077587A Division JP6972225B2 (ja) | 2016-05-26 | 2020-04-24 | 時間ベース管理システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017209070A true JP2017209070A (ja) | 2017-11-30 |
| JP6697955B2 JP6697955B2 (ja) | 2020-05-27 |
Family
ID=60411223
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016105365A Active JP6697955B2 (ja) | 2016-05-26 | 2016-05-26 | 作業車及び作業車に適用される時間ベース管理システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11144061B2 (ja) |
| EP (1) | EP3466232B1 (ja) |
| JP (1) | JP6697955B2 (ja) |
| CN (1) | CN109068576B (ja) |
| WO (1) | WO2017203733A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019121267A (ja) * | 2018-01-10 | 2019-07-22 | ヤンマー株式会社 | 走行速度制御装置 |
| JP2020198789A (ja) * | 2019-06-06 | 2020-12-17 | 井関農機株式会社 | 自律走行作業車 |
| JP2021007335A (ja) * | 2019-06-28 | 2021-01-28 | 株式会社クボタ | 作業車両 |
| JP2022033560A (ja) * | 2020-08-17 | 2022-03-02 | 井関農機株式会社 | 作業車両 |
| JP7438851B2 (ja) | 2020-06-01 | 2024-02-27 | 本田技研工業株式会社 | 移動体制御装置、移動体、移動体管理システム、移動体制御方法、およびプログラム |
| JP7486562B2 (ja) | 2017-12-19 | 2024-05-17 | 株式会社クボタ | 水田作業機 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015010726A1 (de) * | 2015-08-17 | 2017-02-23 | Liebherr-Werk Biberach Gmbh | Verfahren zur Baustellenüberwachung, Arbeitsmaschine und System zur Baustellenüberwachung |
| AU2018210524B2 (en) * | 2017-01-23 | 2021-02-25 | Built Robotics Inc. | Excavating earth from a dig site using an excavation vehicle |
| US11386373B2 (en) * | 2017-03-31 | 2022-07-12 | Nec Corporation | Work management device, work management method, and program storage medium |
| US10820508B2 (en) * | 2018-08-20 | 2020-11-03 | Cnh Industrial America Llc | System and method for operating an agricultural harvester |
| US20220287218A1 (en) * | 2021-03-15 | 2022-09-15 | Kubota Corporation | Work vehicle and control system for work vehicle |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63148909A (ja) * | 1986-12-11 | 1988-06-21 | 井関農機株式会社 | 収穫機における自動操向制御装置 |
| JP2002358122A (ja) * | 2001-05-31 | 2002-12-13 | Yanmar Agricult Equip Co Ltd | 農業用作業車 |
| JP2010142185A (ja) * | 2008-12-20 | 2010-07-01 | Iseki & Co Ltd | 自律走行苗移植機 |
| JP2010187558A (ja) * | 2009-02-16 | 2010-09-02 | Iseki & Co Ltd | 可変散布装置 |
| WO2016076289A1 (ja) * | 2014-11-13 | 2016-05-19 | ヤンマー株式会社 | 農用作業車 |
Family Cites Families (101)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2566745B2 (ja) * | 1994-04-29 | 1996-12-25 | 三星重工業株式会社 | 電子制御油圧掘削機の自動平坦作業方法 |
| KR100516665B1 (ko) * | 1997-01-23 | 2005-12-14 | 얀마-노키 가부시키가이샤 | 이동농기 |
| US6108949A (en) * | 1997-12-19 | 2000-08-29 | Carnegie Mellon University | Method and apparatus for determining an excavation strategy |
| CN1166841C (zh) * | 1998-03-18 | 2004-09-15 | 日立建机株式会社 | 自动操作的挖土机和包括该挖土机的石头压碎系统 |
| US6167336A (en) * | 1998-05-18 | 2000-12-26 | Carnegie Mellon University | Method and apparatus for determining an excavation strategy for a front-end loader |
| US6363632B1 (en) * | 1998-10-09 | 2002-04-02 | Carnegie Mellon University | System for autonomous excavation and truck loading |
| US6823616B1 (en) * | 2001-07-06 | 2004-11-30 | Boskalis Westminister Inc. | Method of excavating |
| JP2003303021A (ja) | 2002-04-10 | 2003-10-24 | Mitsubishi Agricult Mach Co Ltd | 作業用走行車 |
| US6711838B2 (en) * | 2002-07-29 | 2004-03-30 | Caterpillar Inc | Method and apparatus for determining machine location |
| JP2005315768A (ja) * | 2004-04-30 | 2005-11-10 | National Agriculture & Bio-Oriented Research Organization | Gps信号をトリガとする計測システム |
| US6901319B1 (en) * | 2004-07-06 | 2005-05-31 | Deere & Company | System and method for controlling a ground vehicle |
| US7627410B2 (en) * | 2005-12-12 | 2009-12-01 | Caterpillar Inc. | Machine payload measurement dial-a-load system |
| US20070240341A1 (en) * | 2006-04-12 | 2007-10-18 | Esco Corporation | UDD dragline bucket machine and control system |
| US7509198B2 (en) * | 2006-06-23 | 2009-03-24 | Caterpillar Inc. | System for automated excavation entry point selection |
| US7853382B2 (en) * | 2006-09-29 | 2010-12-14 | Deere & Company | Loader boom control system |
| US7516563B2 (en) * | 2006-11-30 | 2009-04-14 | Caterpillar Inc. | Excavation control system providing machine placement recommendation |
| EP2130180A4 (en) * | 2007-03-21 | 2014-04-02 | Commw Scient Ind Res Org | METHOD FOR PLANNING AND EXECUTING NON-OBSTACLE PATHWAYS FOR ROTATING AN EXCAVATOR |
| US7832126B2 (en) * | 2007-05-17 | 2010-11-16 | Siemens Industry, Inc. | Systems, devices, and/or methods regarding excavating |
| DE202007008557U1 (de) * | 2007-06-19 | 2008-10-30 | Liebherr-Werk Bischofshofen Ges.M.B.H. | System zum automatischen Bewegen von Material |
| US7711842B2 (en) * | 2007-06-29 | 2010-05-04 | Caterpillar Inc. | System and method for remote machine data transfer |
| JP4998324B2 (ja) * | 2008-02-26 | 2012-08-15 | 井関農機株式会社 | 走行車両 |
| DE102008015277A1 (de) * | 2008-03-20 | 2009-09-24 | Deere & Company, Moline | Verfahren und Vorrichtung zur Lenkung einer zweiten landwirtschaftlichen Maschine, die relativ zu einer ersten landwirtschaftlichen Maschine über ein Feld lenkbar ist |
| JP2010187588A (ja) | 2009-02-17 | 2010-09-02 | Kao Corp | α−アミラーゼの生産方法 |
| JP2012029600A (ja) * | 2010-07-29 | 2012-02-16 | Iseki & Co Ltd | 苗移植機 |
| US8639393B2 (en) * | 2010-11-30 | 2014-01-28 | Caterpillar Inc. | System for automated excavation planning and control |
| US20120253743A1 (en) * | 2010-12-30 | 2012-10-04 | Agco Corporation | Real-Time Determination of Machine Performance for Fleet Management |
| US8655505B2 (en) * | 2011-02-18 | 2014-02-18 | Caterpillar Inc. | Worksite management system implementing remote machine reconfiguration |
| JP5727822B2 (ja) * | 2011-03-15 | 2015-06-03 | 株式会社クボタ | トラクタ |
| CN103004340B (zh) * | 2011-09-20 | 2017-04-12 | 井关农机株式会社 | 苗移植机 |
| US9206587B2 (en) * | 2012-03-16 | 2015-12-08 | Harnischfeger Technologies, Inc. | Automated control of dipper swing for a shovel |
| JP5597222B2 (ja) * | 2012-04-11 | 2014-10-01 | 株式会社小松製作所 | 油圧ショベルの掘削制御システム |
| US8620535B2 (en) * | 2012-05-21 | 2013-12-31 | Caterpillar Inc. | System for automated excavation planning and control |
| ITMI20120922A1 (it) * | 2012-05-28 | 2013-11-29 | Snowgrolic S A R L | Metodo di controllo, programma per elaboratore elettronico e dispositivo di controllo di un veicolo cingolato |
| US20140012404A1 (en) * | 2012-07-06 | 2014-01-09 | Caterpillar Inc. | Methods and systems for machine cut planning |
| US9234750B2 (en) * | 2012-07-30 | 2016-01-12 | Caterpillar Inc. | System and method for operating a machine |
| US20140064897A1 (en) * | 2012-08-29 | 2014-03-06 | Deere And Company | Single stick operation of a work tool |
| AU2013227999A1 (en) * | 2012-09-13 | 2014-03-27 | Technological Resources Pty Ltd | A system for, and a method of, controlling operation of a vehicle in a defined area |
| US8838331B2 (en) * | 2012-09-21 | 2014-09-16 | Caterpillar Inc. | Payload material density calculation and machine using same |
| US8755977B2 (en) * | 2012-09-21 | 2014-06-17 | Siemens Industry, Inc. | Method and system for preemptive load weight for mining excavating equipment |
| US8948981B2 (en) * | 2012-12-20 | 2015-02-03 | Caterpillar Inc. | System and method for optimizing a cut location |
| US9014922B2 (en) * | 2012-12-20 | 2015-04-21 | Caterpillar Inc. | System and method for optimizing a cut location |
| US20140277905A1 (en) * | 2013-03-15 | 2014-09-18 | Deere & Company | Methods and apparatus to manage a fleet of work machines |
| JP6238615B2 (ja) * | 2013-07-22 | 2017-11-29 | 株式会社クボタ | 車輪駆動式作業車 |
| US20150234767A1 (en) * | 2013-09-23 | 2015-08-20 | Farmobile, Llc | Farming data collection and exchange system |
| US9695574B2 (en) * | 2013-11-15 | 2017-07-04 | Komatsu Ltd. | Work vehicle and control method for same |
| US10380704B2 (en) * | 2014-01-14 | 2019-08-13 | Deere & Company | Operator performance recommendation generation |
| WO2015119263A1 (ja) * | 2014-02-06 | 2015-08-13 | ヤンマー株式会社 | 自律走行作業車両の走行経路の設定方法 |
| EP3125061B1 (en) * | 2014-03-28 | 2019-06-12 | Yanmar Co., Ltd. | Autonomous travelling service vehicle |
| US9267837B2 (en) * | 2014-03-31 | 2016-02-23 | Siemens Industry, Inc. | Methods and systems for active load weight for mining excavating equipment |
| US9458598B2 (en) * | 2014-04-24 | 2016-10-04 | Komatsu Ltd. | Work vehicle |
| US9454155B2 (en) * | 2014-06-02 | 2016-09-27 | Trimble Navigation Limited | Implement guidance |
| US9404239B2 (en) * | 2014-06-09 | 2016-08-02 | Caterpillar Inc. | Sub-bin refinement for autonomous machines |
| AU2014203829A1 (en) * | 2014-07-11 | 2016-01-28 | Caterpillar Of Australia Pty Ltd | System and method for determining machine operational state |
| US9891605B2 (en) * | 2014-08-06 | 2018-02-13 | Caterpillar Inc. | Grade control cleanup pass using volume constraints |
| US10109024B2 (en) * | 2014-09-05 | 2018-10-23 | The Climate Corporation | Collecting data to generate an agricultural prescription |
| US9760081B2 (en) * | 2014-09-12 | 2017-09-12 | Caterpillar Inc. | System and method for optimizing a work implement path |
| US9256227B1 (en) * | 2014-09-12 | 2016-02-09 | Caterpillar Inc. | System and method for controlling the operation of a machine |
| US9360334B2 (en) * | 2014-09-12 | 2016-06-07 | Caterpillar Inc. | System and method for setting an end location of a path |
| US9228321B1 (en) * | 2014-09-12 | 2016-01-05 | Caterpillar Inc. | System and method for adjusting the operation of a machine |
| US9388550B2 (en) * | 2014-09-12 | 2016-07-12 | Caterpillar Inc. | System and method for controlling the operation of a machine |
| US20160076222A1 (en) * | 2014-09-12 | 2016-03-17 | Caterpillar Inc. | System and Method for Optimizing a Work Implement Path |
| US9469967B2 (en) * | 2014-09-12 | 2016-10-18 | Caterpillar Inc. | System and method for controlling the operation of a machine |
| US9605415B2 (en) * | 2014-09-12 | 2017-03-28 | Caterpillar Inc. | System and method for monitoring a machine |
| US9297147B1 (en) * | 2014-09-30 | 2016-03-29 | Caterpillar Inc. | Semi-autonomous tractor system crest ramp removal |
| EP3207187B1 (en) * | 2014-10-13 | 2019-11-20 | Sandvik Mining and Construction Oy | Arrangement for controlling a work machine |
| US20160201298A1 (en) * | 2015-01-08 | 2016-07-14 | Caterpillar Inc. | Systems and Methods for Constrained Dozing |
| US20160300195A1 (en) * | 2015-04-07 | 2016-10-13 | Gates Corporation | System and Method for Managing a Product Life Cycle |
| US9563867B2 (en) * | 2015-04-13 | 2017-02-07 | Caterpillar Inc. | System for allocating and monitoring machines |
| US10186004B2 (en) * | 2015-05-20 | 2019-01-22 | Caterpillar Inc. | System and method for evaluating a material movement plan |
| US9587369B2 (en) * | 2015-07-02 | 2017-03-07 | Caterpillar Inc. | Excavation system having adaptive dig control |
| US9974225B2 (en) * | 2016-01-14 | 2018-05-22 | Cnh Industrial America Llc | System and method for generating and implementing an end-of-row turn path |
| US9968025B2 (en) * | 2016-01-14 | 2018-05-15 | CNH Industrial American LLC | System and method for generating and implementing an end-of-row turn path |
| KR20170102799A (ko) * | 2016-03-01 | 2017-09-12 | 가부시키가이샤 고마쓰 세이사쿠쇼 | 평가 장치 및 평가 방법 |
| US10066367B1 (en) * | 2016-06-20 | 2018-09-04 | Robo Industries, Inc. | System for determining autonomous adjustments to an implement position and angle |
| JP2018021347A (ja) * | 2016-08-02 | 2018-02-08 | 株式会社小松製作所 | 作業車両の制御システム、制御方法、及び作業車両 |
| JP2018021346A (ja) * | 2016-08-02 | 2018-02-08 | 株式会社小松製作所 | 作業車両の制御システム、制御方法、及び作業車両 |
| JP2018021348A (ja) * | 2016-08-02 | 2018-02-08 | 株式会社小松製作所 | 作業車両の制御システム、制御方法、及び作業車両 |
| JP2018021345A (ja) * | 2016-08-02 | 2018-02-08 | 株式会社小松製作所 | 作業車両の制御システム、制御方法、及び作業車両 |
| JP7122800B2 (ja) * | 2016-08-05 | 2022-08-22 | 株式会社小松製作所 | 作業車両の制御システム、制御方法、及び作業車両 |
| US10860016B1 (en) * | 2016-09-07 | 2020-12-08 | Robo Industries, Inc. | Automated site based mission planning system |
| US10234368B2 (en) * | 2016-10-13 | 2019-03-19 | Deere & Company | System and method for load evaluation |
| AU2018210524B2 (en) * | 2017-01-23 | 2021-02-25 | Built Robotics Inc. | Excavating earth from a dig site using an excavation vehicle |
| US10267018B2 (en) * | 2017-01-27 | 2019-04-23 | Deere & Company | Work vehicle load control system and method |
| AU2017272178B2 (en) * | 2017-01-31 | 2019-06-20 | Komatsu Ltd. | Control system for work vehicle, and method for setting trajectory of work implement |
| US10850734B2 (en) * | 2017-04-03 | 2020-12-01 | Motional Ad Llc | Processing a request signal regarding operation of an autonomous vehicle |
| US10479354B2 (en) * | 2017-05-02 | 2019-11-19 | Cnh Industrial America Llc | Obstacle detection system for a work vehicle |
| US10208453B2 (en) * | 2017-05-16 | 2019-02-19 | Caterpillar Inc. | Methods and systems for monitoring work zone in worksite |
| US10407878B2 (en) * | 2017-05-23 | 2019-09-10 | Caterpillar Inc. | System and method for dumping material |
| US10151078B1 (en) * | 2017-05-23 | 2018-12-11 | Caterpillar Trimble Control Technologies Llc | Blade control below design |
| US10472803B2 (en) * | 2017-08-07 | 2019-11-12 | Caterpillar Inc. | System and method for determining stale terrain value of worksite |
| JP6868938B2 (ja) * | 2017-08-24 | 2021-05-12 | 日立建機株式会社 | 建設機械の荷重計測システム |
| US20190101641A1 (en) * | 2017-10-04 | 2019-04-04 | Caterpillar Paving Products Inc. | Work tool collision avoidance system for underground objects |
| US10738439B2 (en) * | 2018-01-19 | 2020-08-11 | Deere & Company | Open loop electrohydraulic bucket position control method and system |
| US20200019192A1 (en) * | 2018-07-13 | 2020-01-16 | Caterpillar Paving Products Inc. | Object detection and implement position detection system |
| US20200032490A1 (en) * | 2018-07-26 | 2020-01-30 | Built Robotics Inc. | Filling earth at a location within a dig site using an excavation vehicle |
| US10794039B2 (en) * | 2018-08-08 | 2020-10-06 | Caterpillar Inc. | System and method for controlling the operation of a machine |
| US10820508B2 (en) * | 2018-08-20 | 2020-11-03 | Cnh Industrial America Llc | System and method for operating an agricultural harvester |
| US11041291B2 (en) * | 2018-09-14 | 2021-06-22 | Deere & Company | Controlling a work machine based on sensed variables |
| US10774506B2 (en) * | 2018-09-28 | 2020-09-15 | Caterpillar Inc. | System and method for controlling the operation of a machine |
| US10832435B1 (en) * | 2019-04-26 | 2020-11-10 | Caterpillar Inc. | Determining payload carrier volume using a neural network |
| US10849264B1 (en) * | 2019-05-21 | 2020-12-01 | Farmobile Llc | Determining activity swath from machine-collected worked data |
-
2016
- 2016-05-26 JP JP2016105365A patent/JP6697955B2/ja active Active
- 2016-12-06 WO PCT/JP2016/086232 patent/WO2017203733A1/ja unknown
- 2016-12-06 US US16/093,678 patent/US11144061B2/en active Active
- 2016-12-06 CN CN201680084238.4A patent/CN109068576B/zh active Active
- 2016-12-06 EP EP16903212.5A patent/EP3466232B1/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63148909A (ja) * | 1986-12-11 | 1988-06-21 | 井関農機株式会社 | 収穫機における自動操向制御装置 |
| JP2002358122A (ja) * | 2001-05-31 | 2002-12-13 | Yanmar Agricult Equip Co Ltd | 農業用作業車 |
| JP2010142185A (ja) * | 2008-12-20 | 2010-07-01 | Iseki & Co Ltd | 自律走行苗移植機 |
| JP2010187558A (ja) * | 2009-02-16 | 2010-09-02 | Iseki & Co Ltd | 可変散布装置 |
| WO2016076289A1 (ja) * | 2014-11-13 | 2016-05-19 | ヤンマー株式会社 | 農用作業車 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7486562B2 (ja) | 2017-12-19 | 2024-05-17 | 株式会社クボタ | 水田作業機 |
| JP2019121267A (ja) * | 2018-01-10 | 2019-07-22 | ヤンマー株式会社 | 走行速度制御装置 |
| JP2021176094A (ja) * | 2018-01-10 | 2021-11-04 | ヤンマーパワーテクノロジー株式会社 | 走行速度制御装置 |
| JP2020198789A (ja) * | 2019-06-06 | 2020-12-17 | 井関農機株式会社 | 自律走行作業車 |
| JP7192667B2 (ja) | 2019-06-06 | 2022-12-20 | 井関農機株式会社 | 自律走行作業車 |
| JP2021007335A (ja) * | 2019-06-28 | 2021-01-28 | 株式会社クボタ | 作業車両 |
| JP7159121B2 (ja) | 2019-06-28 | 2022-10-24 | 株式会社クボタ | 作業車両 |
| JP7438851B2 (ja) | 2020-06-01 | 2024-02-27 | 本田技研工業株式会社 | 移動体制御装置、移動体、移動体管理システム、移動体制御方法、およびプログラム |
| JP2022033560A (ja) * | 2020-08-17 | 2022-03-02 | 井関農機株式会社 | 作業車両 |
| JP7259814B2 (ja) | 2020-08-17 | 2023-04-18 | 井関農機株式会社 | 作業車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3466232A1 (en) | 2019-04-10 |
| EP3466232A4 (en) | 2020-01-15 |
| JP6697955B2 (ja) | 2020-05-27 |
| US20190072972A1 (en) | 2019-03-07 |
| US11144061B2 (en) | 2021-10-12 |
| EP3466232B1 (en) | 2022-04-27 |
| WO2017203733A1 (ja) | 2017-11-30 |
| CN109068576A (zh) | 2018-12-21 |
| CN109068576B (zh) | 2021-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017203733A1 (ja) | 作業車及び作業車に適用される時間ベース管理システム | |
| JP7354217B2 (ja) | 自動作業システム | |
| US10474153B2 (en) | Work vehicle, slope travel control system for work vehicle, and slope travel control method for work vehicle | |
| KR102140854B1 (ko) | 자율 주행 작업 차량의 주행 경로 설정 방법 | |
| JP2022022285A (ja) | 制御システム | |
| US20140170617A1 (en) | Monitoring System for a Machine | |
| WO2015119265A1 (ja) | 走行制御システム | |
| US20160076226A1 (en) | System and Method for Monitoring a Machine | |
| WO2015118731A1 (ja) | 併走作業システムの制御装置 | |
| US11937526B2 (en) | Control device for work vehicle configured to travel autonomously | |
| JP7069364B2 (ja) | 作業車両 | |
| WO2018146955A1 (ja) | 作業車のための衛星電波感度分布管理システム及び方法 | |
| JP2022016479A (ja) | スリップ判定システム | |
| JP2020074127A (ja) | 作業車協調システム | |
| JP6921935B2 (ja) | 圃場作業車両 | |
| JP2018198582A (ja) | 自動走行作業車 | |
| JP6972225B2 (ja) | 時間ベース管理システム | |
| JP2020126307A (ja) | 作業車両用の目標経路生成システム | |
| KR102496210B1 (ko) | 농사용 차량의 직진구동을 위한 기준값 조정 방법 및 그 장치 | |
| WO2023119993A1 (ja) | 圃場作業機 | |
| JP7038651B2 (ja) | 圃場作業機及び農作業支援システム | |
| US20230251669A1 (en) | Path determination for automatic mowers | |
| EP3901722A1 (en) | Travel state display device and automated travel system | |
| JP2023126466A (ja) | 自動走行方法及び自動走行システム | |
| JP2020162605A (ja) | 作業機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180626 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190604 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190724 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200306 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200331 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200427 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6697955 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |