JP2017129788A - 焦点検出装置及び方法、及び撮像装置 - Google Patents
焦点検出装置及び方法、及び撮像装置 Download PDFInfo
- Publication number
- JP2017129788A JP2017129788A JP2016009979A JP2016009979A JP2017129788A JP 2017129788 A JP2017129788 A JP 2017129788A JP 2016009979 A JP2016009979 A JP 2016009979A JP 2016009979 A JP2016009979 A JP 2016009979A JP 2017129788 A JP2017129788 A JP 2017129788A
- Authority
- JP
- Japan
- Prior art keywords
- focus detection
- subject
- amount
- focus
- photoelectric conversion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/672—Focus control based on electronic image sensor signals based on the phase difference signals
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/675—Focus control based on electronic image sensor signals comprising setting of focusing regions
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/10—Circuitry of solid-state image sensors [SSIS]; Control thereof for transforming different wavelengths into image signals
- H04N25/11—Arrangement of colour filter arrays [CFA]; Filter mosaics
- H04N25/13—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements
- H04N25/134—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements based on three different wavelength filter elements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/703—SSIS architectures incorporating pixels for producing signals other than image signals
- H04N25/704—Pixels specially adapted for focusing, e.g. phase difference pixel sets
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20021—Dividing image into blocks, subimages or windows
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30196—Human being; Person
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
- H04N23/633—Control of cameras or camera modules by using electronic viewfinders for displaying additional information relating to control or operation of the camera
- H04N23/634—Warning indications
Abstract
【解決手段】 像面位相差AFにおいて、撮像素子上に結像された画像における被写体を含むように、焦点検出を行う1つ以上の焦点検出領域を設定する設定手段と、被写体の位置および大きさの少なくともいずれかが変化しているか否かを検出する検出手段と、検出結果に応じて、焦点検出領域を第1の方向に分割することで、複数の分割領域に分割する分割手段と、分割領域ごとに、各分割領域に含まれる対の光電変換素子からそれぞれ出力された信号を前記第1の方向に別々に加算して得られた一対の信号から相関量を求め、更に焦点検出領域ごとに加算した相関量に基づいて、焦点検出を行う焦点検出手段と、を有し、分割手段は、被写体の位置及び大きさの少なくともいずれかが変化している場合に、変化していない場合よりも分割領域の分割数を少なくする。
【選択図】 図1
Description
まず、図1を参照して、第1の実施形態における撮像装置の構成について説明する。なお、本発明における撮像装置100は、被写体を撮影して、動画や静止画のデータをテープや固体メモリ、光ディスクや磁気ディスクなどの各種メディアに記録可能な、ビデオカメラやデジタルスチルカメラなどであるが、これらに限定されるものではない。
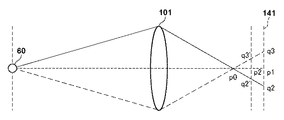
次に、本発明の第2の実施形態における焦点検出領域の設定方法について説明する。第1の実施形態では、動体を検出したか否か、またその被写体の大きさに応じて、焦点検出領域の輝度ライン加算数、分割数を設定する方法について説明した。これに対し、第2の実施形態では、繰り返し焦点検出を行う中で、被写体の画面内、光軸の移動に応じて、焦点検出領域の数、及び、相関演算時のシフト範囲を変更する方法について説明する。
Claims (12)
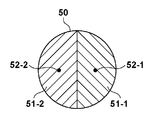
- 撮像光学系の異なる瞳領域を透過した対の光束を、それぞれ一つのマイクロレンズを共有する第1の光電変換素子および第2の光電変換素子で受光する複数の焦点検出画素を備えた撮像素子から出力された信号を用いて、位相差方式の焦点検出を行う焦点検出装置であって、
前記撮像素子に結像された画像における被写体を含むように、前記焦点検出を行う1つ以上の焦点検出領域を設定する設定手段と、
前記被写体の位置および大きさの少なくともいずれかが変化しているか否かを検出する検出手段と、
前記検出手段による検出結果に応じて、前記焦点検出領域を予め決められた第1の方向に分割することで、複数の分割領域に分割する分割手段と、
前記分割領域ごとに、各分割領域に含まれる前記第1の光電変換素子から出力された信号を前記第1の方向に加算すると共に、前記各分割領域に含まれる前記第2の光電変換素子から出力された信号を前記第1の方向に加算し、加算して得られた一対の信号を互いにシフトしながら相関量を求め、求めた前記分割領域ごとの相関量を前記焦点検出領域ごとに加算した相関量に基づいて、前記焦点検出を行う焦点検出手段と、を有し、
前記分割手段は、前記被写体の位置及び大きさの少なくともいずれかが変化している場合に、変化していない場合よりも前記分割領域の分割数を少なくすることを特徴とする焦点検出装置。 - 前記焦点検出手段は、前記被写体の大きさが予め決められた第1の閾値よりも大きいか否かを検出し、前記被写体の大きさが前記第1の閾値よりも大きい場合に、前記焦点検出画素から出力された信号を、前記第1の方向と垂直な第2の方向に間引きまたは加算することを特徴とする請求項1に記載の焦点検出装置。
- 前記被写体の位置が変化している場合、前記設定手段は、前記被写体の位置の移動量が予め決められた第2の閾値より小さい場合に、前記第2の閾値以上の場合よりも、設定する前記焦点検出領域の数を少なくすることを特徴とする請求項1または2に記載の焦点検出装置。
- 前記焦点検出手段は、前記検出手段により検出された前記被写体の位置の大きさの変化量が予め決められた第3の閾値よりも小さい場合に、前記シフトする範囲を、前記第3の閾値以上の場合よりも狭い範囲に設定することを特徴とする請求項1乃至3のいずれか1項に記載の焦点検出装置。
- 撮像光学系の異なる瞳領域を透過した対の光束を、それぞれ一つのマイクロレンズを共有する一対の光電変換素子で受光する複数の焦点検出画素を備えた撮像素子から出力された信号を用いて、位相差方式の焦点検出を行う焦点検出装置であって、
前記撮像素子に結像された画像における被写体を含むように、前記焦点検出を行う1つ以上の焦点検出領域を設定する設定手段と、
前記被写体の位置が変化している場合に、前記被写体の位置の移動量を検出する検出手段と、
前記焦点検出領域ごとに、各焦点検出領域に含まれる前記焦点検出画素から出力された信号に基づいて、前記焦点検出を行う焦点検出手段と、を有し、
前記設定手段は、前記被写体の位置の移動量が予め決められた第1の閾値よりも小さい場合に、前記第1の閾値以上の場合よりも、設定する前記焦点検出領域の数を少なくすることを特徴とする焦点検出装置。 - 前記焦点検出手段は、前記一対の光電変換素子からそれぞれ出力された信号を互いにシフトしながら相関量を求めることにより焦点検出を行い、
前記検出手段は、更に、前記被写体の大きさが変化しているか否かを検出し、
前記検出手段により検出された前記被写体の大きさの変化量が予め決められた第2の閾値よりも小さい場合に、前記シフトする範囲を、前記第2の閾値以上の場合よりも狭い範囲に設定することを特徴とする請求項5に記載の焦点検出装置。 - 前記焦点検出手段による焦点検出結果を、フォーカスレンズを駆動するための駆動量に変換する変換手段を更に有し、
前記変換手段は、前記フォーカスレンズを含む撮像光学系の情報を用いて、前記駆動量を補正する処理を行うことが可能であって、前記被写体の位置および大きさの少なくともいずれかが変化している場合に、当該補正を行わないことを特徴とする請求項1乃至6のいずれか1項に記載の焦点検出装置。 - 撮像光学系の異なる瞳領域を透過した対の光束を、それぞれ一つのマイクロレンズを共有する一対の光電変換素子で受光する複数の焦点検出画素を備えた撮像素子から出力された信号を用いて、位相差方式の焦点検出を行う焦点検出装置であって、
前記撮像素子に結像された画像における被写体を含むように、前記焦点検出を行う1つ以上の焦点検出領域を設定する設定手段と、
前記被写体の大きさが変化しているか否かを検出する検出手段と、
前記焦点検出領域ごとに、前記一対の光電変換素子からそれぞれ出力された信号を互いにシフトしながら相関量を求めることにより前記焦点検出を行う焦点検出手段と、を有し、
前記焦点検出手段は、前記検出手段により検出された前記被写体の大きさの変化量が予め決められた閾値よりも小さい場合に、前記シフトする範囲を、前記閾値以上の場合よりも狭い範囲に設定することを特徴とする焦点検出装置。 - 前記撮像素子と、
請求項1乃至8のいずれか1項に記載の焦点検出装置と
を有することを特徴とする撮像装置。 - 撮像光学系の異なる瞳領域を透過した対の光束を、それぞれ一つのマイクロレンズを共有する第1の光電変換素子および第2の光電変換素子で受光する複数の焦点検出画素を備えた撮像素子から出力された信号を用いて、位相差方式の焦点検出を行う焦点検出方法であって、
設定手段が、前記撮像素子に結像された画像における被写体を含むように、前記焦点検出を行う1つ以上の焦点検出領域を設定する設定工程と、
検出手段が、前記被写体の位置および大きさの少なくともいずれかが変化しているか否かを検出する検出工程と、
分割手段が、前記検出工程における検出結果に応じて、前記焦点検出領域を予め決められた第1の方向に分割することで、複数の分割領域に分割する分割工程と、
焦点検出手段が、前記分割領域ごとに、各分割領域に含まれる前記第1の光電変換素子から出力された信号を前記第1の方向に加算すると共に、前記各分割領域に含まれる前記第2の光電変換素子から出力された信号を前記第1の方向に加算する第1の加算工程と、
前記焦点検出手段が、前記分割領域ごとに、加算して得られた一対の信号を互いにシフトしながら相関量を求める演算工程と、
前記焦点検出手段が、求めた前記分割領域ごとの相関量を前記焦点検出領域ごとに加算する第2の加算工程と、
前記焦点検出手段が、前記加算した相関量に基づいて、前記焦点検出を行う焦点検出工程と、を有し、
前記分割工程において、前記被写体の位置及び大きさの少なくともいずれかが変化している場合に、変化していない場合よりも前記分割領域の分割数を少なくすることを特徴とする焦点検出方法。 - 撮像光学系の異なる瞳領域を透過した対の光束を、それぞれ一つのマイクロレンズを共有する一対の光電変換素子で受光する複数の焦点検出画素を備えた撮像素子から出力された信号を用いて、位相差方式の焦点検出を行う焦点検出方法であって、
設定手段が、前記撮像素子に結像された画像における被写体を含むように、前記焦点検出を行う1つ以上の焦点検出領域を設定する設定工程と、
検出手段が、前記被写体の位置が変化している場合に、前記被写体の位置の移動量を検出する検出工程と、
焦点検出手段が、前記焦点検出領域ごとに、各焦点検出領域に含まれる前記焦点検出画素から出力された信号に基づいて、前記焦点検出を行う焦点検出工程と、を有し、
前記設定工程において、前記被写体の位置の移動量が予め決められた第1の閾値よりも小さい場合に、前記第1の閾値以上の場合よりも、設定する前記焦点検出領域の数を少なくすることを特徴とする焦点検出方法。 - 撮像光学系の異なる瞳領域を透過した対の光束を、それぞれ一つのマイクロレンズを共有する一対の光電変換素子で受光する複数の焦点検出画素を備えた撮像素子から出力された信号を用いて、位相差方式の焦点検出を行う焦点検出方法であって、
設定手段が、前記撮像素子に結像された画像における被写体を含むように、前記焦点検出を行う1つ以上の焦点検出領域を設定する設定工程と、
検出手段が、前記被写体の大きさが変化しているか否かを検出する検出工程と、
焦点検出手段が、前記焦点検出領域ごとに、前記一対の光電変換素子からそれぞれ出力された信号を互いにシフトしながら相関量を求めることにより前記焦点検出を行う焦点検出工程と、を有し、
前記焦点検出工程では、前記検出工程において検出された前記被写体の大きさの変化量が予め決められた閾値よりも小さい場合に、前記シフトする範囲を、前記閾値以上の場合よりも狭い範囲に設定することを特徴とする焦点検出方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016009979A JP2017129788A (ja) | 2016-01-21 | 2016-01-21 | 焦点検出装置及び方法、及び撮像装置 |
| US15/410,027 US10313577B2 (en) | 2016-01-21 | 2017-01-19 | Focus detection apparatus, focus detection method, and image capturing apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016009979A JP2017129788A (ja) | 2016-01-21 | 2016-01-21 | 焦点検出装置及び方法、及び撮像装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017129788A true JP2017129788A (ja) | 2017-07-27 |
| JP2017129788A5 JP2017129788A5 (ja) | 2019-03-07 |
Family
ID=59359254
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016009979A Pending JP2017129788A (ja) | 2016-01-21 | 2016-01-21 | 焦点検出装置及び方法、及び撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10313577B2 (ja) |
| JP (1) | JP2017129788A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019031000A1 (ja) * | 2017-08-09 | 2019-02-14 | ソニー株式会社 | 信号処理装置、撮像装置、信号処理方法及びプログラム |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017129788A (ja) * | 2016-01-21 | 2017-07-27 | キヤノン株式会社 | 焦点検出装置及び方法、及び撮像装置 |
| JP6530437B2 (ja) * | 2017-03-27 | 2019-06-12 | アンリツ株式会社 | 光コネクタ端面検査装置とその合焦画像データ取得方法 |
| US10387477B2 (en) * | 2017-05-30 | 2019-08-20 | Qualcomm Incorporated | Calibration for phase detection auto focus (PDAF) camera systems |
| JP7012142B2 (ja) * | 2018-03-01 | 2022-01-27 | 富士フイルム株式会社 | 焦点調節操作検出装置、焦点調節操作検出方法及び焦点調節操作検出プログラム、並びに、撮像装置本体及び撮像装置 |
| US11182914B2 (en) | 2018-05-21 | 2021-11-23 | Facebook Technologies, Llc | Dynamic structured light for depth sensing systems based on contrast in a local area |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01287512A (ja) * | 1988-05-13 | 1989-11-20 | Minolta Camera Co Ltd | 自動焦点検出装置 |
| JP2006017960A (ja) * | 2004-06-30 | 2006-01-19 | Kodak Digital Product Center Japan Ltd | 撮像方法及び撮像装置 |
| JP2007047617A (ja) * | 2005-08-12 | 2007-02-22 | Canon Inc | 焦点調節装置、撮像装置、及び焦点調節装置の制御方法 |
| JP2008241733A (ja) * | 2007-03-23 | 2008-10-09 | Canon Inc | 撮像装置 |
| WO2012073729A1 (ja) * | 2010-11-30 | 2012-06-07 | 富士フイルム株式会社 | 撮像装置及びその合焦位置検出方法 |
| JP2012178705A (ja) * | 2011-02-25 | 2012-09-13 | Nikon Corp | 撮像装置およびプログラム |
| WO2013088917A1 (ja) * | 2011-12-13 | 2013-06-20 | ソニー株式会社 | 画像処理装置、画像処理方法、及び記録媒体 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62148911A (ja) * | 1985-12-23 | 1987-07-02 | Minolta Camera Co Ltd | 焦点検出装置 |
| US4768054A (en) * | 1986-02-14 | 1988-08-30 | Minolta Camera Kabushiki Kaisha | Focus condition detecting device |
| JPS63246730A (ja) * | 1986-05-16 | 1988-10-13 | Minolta Camera Co Ltd | 焦点検出装置 |
| EP0364137A3 (en) * | 1988-09-29 | 1991-07-03 | Nikon Corporation | Automatic focus state detecting apparatus |
| JP3012025B2 (ja) * | 1991-04-16 | 2000-02-21 | コニカ株式会社 | 自動焦点カメラ |
| JP3188742B2 (ja) * | 1992-01-31 | 2001-07-16 | キヤノン株式会社 | カメラ |
| JPH0875986A (ja) * | 1994-09-06 | 1996-03-22 | Nikon Corp | 焦点検出装置 |
| JP2002072061A (ja) * | 2000-08-23 | 2002-03-12 | Canon Inc | 測距装置及びカメラ |
| JP4785266B2 (ja) * | 2001-04-17 | 2011-10-05 | キヤノン株式会社 | 多点測距装置 |
| JP5483953B2 (ja) * | 2009-08-18 | 2014-05-07 | キヤノン株式会社 | 焦点調節装置、焦点調節方法及びプログラム |
| JP5482444B2 (ja) | 2010-05-24 | 2014-05-07 | 株式会社ニコン | 撮像装置 |
| JP2014032214A (ja) | 2010-11-30 | 2014-02-20 | Fujifilm Corp | 撮像装置及びその合焦位置検出方法 |
| JP6249825B2 (ja) * | 2014-03-05 | 2017-12-20 | キヤノン株式会社 | 撮像装置、その制御方法、および制御プログラム |
| JP6442362B2 (ja) * | 2015-05-29 | 2018-12-19 | キヤノン株式会社 | 撮像装置及び撮像素子の制御方法 |
| JP2017129788A (ja) * | 2016-01-21 | 2017-07-27 | キヤノン株式会社 | 焦点検出装置及び方法、及び撮像装置 |
-
2016
- 2016-01-21 JP JP2016009979A patent/JP2017129788A/ja active Pending
-
2017
- 2017-01-19 US US15/410,027 patent/US10313577B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01287512A (ja) * | 1988-05-13 | 1989-11-20 | Minolta Camera Co Ltd | 自動焦点検出装置 |
| JP2006017960A (ja) * | 2004-06-30 | 2006-01-19 | Kodak Digital Product Center Japan Ltd | 撮像方法及び撮像装置 |
| JP2007047617A (ja) * | 2005-08-12 | 2007-02-22 | Canon Inc | 焦点調節装置、撮像装置、及び焦点調節装置の制御方法 |
| JP2008241733A (ja) * | 2007-03-23 | 2008-10-09 | Canon Inc | 撮像装置 |
| WO2012073729A1 (ja) * | 2010-11-30 | 2012-06-07 | 富士フイルム株式会社 | 撮像装置及びその合焦位置検出方法 |
| JP2012178705A (ja) * | 2011-02-25 | 2012-09-13 | Nikon Corp | 撮像装置およびプログラム |
| WO2013088917A1 (ja) * | 2011-12-13 | 2013-06-20 | ソニー株式会社 | 画像処理装置、画像処理方法、及び記録媒体 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019031000A1 (ja) * | 2017-08-09 | 2019-02-14 | ソニー株式会社 | 信号処理装置、撮像装置、信号処理方法及びプログラム |
| CN110945399A (zh) * | 2017-08-09 | 2020-03-31 | 索尼公司 | 信号处理设备、成像设备、信号处理方法和程序 |
| JPWO2019031000A1 (ja) * | 2017-08-09 | 2020-07-09 | ソニー株式会社 | 信号処理装置、撮像装置、信号処理方法及びプログラム |
| US11394866B2 (en) | 2017-08-09 | 2022-07-19 | Sony Group Corporation | Signal processing device, imaging device, signal processing meihod and program |
| CN110945399B (zh) * | 2017-08-09 | 2022-09-20 | 索尼公司 | 信号处理设备、成像设备、信号处理方法和存储器 |
| JP7230807B2 (ja) | 2017-08-09 | 2023-03-01 | ソニーグループ株式会社 | 信号処理装置、撮像装置、信号処理方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170214845A1 (en) | 2017-07-27 |
| US10313577B2 (en) | 2019-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6029309B2 (ja) | 焦点検出装置 | |
| JP6405243B2 (ja) | 焦点検出装置及びその制御方法 | |
| JP6033038B2 (ja) | 焦点検出装置、撮像装置、撮像システム、および、焦点検出方法 | |
| JP2017129788A (ja) | 焦点検出装置及び方法、及び撮像装置 | |
| US9137436B2 (en) | Imaging apparatus and method with focus detection and adjustment | |
| US8854528B2 (en) | Imaging apparatus | |
| US10511781B2 (en) | Image pickup apparatus, control method for image pickup apparatus | |
| US10395348B2 (en) | Image pickup apparatus, image processing apparatus, and control method of image pickup apparatus | |
| JP5750551B2 (ja) | 複数被写体の距離計測装置及び方法 | |
| US9411211B2 (en) | Image capturing apparatus and imaging method | |
| CN103039066A (zh) | 成像装置、图像处理装置以及图像处理方法 | |
| JP5056168B2 (ja) | 焦点調節装置および撮像装置 | |
| CN106470317B (zh) | 摄像设备及其控制方法 | |
| US8644698B2 (en) | Focusing-state detection apparatus, imaging apparatus, and its control method | |
| US20180048805A1 (en) | Control apparatus for performing focus detection, image capturing apparatus, control method, and non-transitory computer-readable storage medium | |
| JP2015087511A (ja) | 焦点検出装置、その制御方法、および制御プログラム、並びに撮像装置 | |
| JP2013160991A (ja) | 撮像装置 | |
| JP6395621B2 (ja) | 焦点調節装置及びそれを用いた撮像装置及び焦点調節方法 | |
| US10003735B2 (en) | Calculation device and image pickup device using calculation device and calculation method | |
| JP2011017754A (ja) | 撮像装置、撮像装置の制御方法、及びコンピュータプログラム | |
| JP6624789B2 (ja) | 合焦制御装置、その制御方法、および制御プログラム、並びに撮像装置 | |
| JP2009042556A (ja) | 電子カメラ | |
| JP2015043044A (ja) | 焦点検出装置およびその制御方法 | |
| JP6740019B2 (ja) | 撮像装置およびその制御方法 | |
| JP6929145B2 (ja) | 撮像装置、撮像方法およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190118 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190118 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190618 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190712 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200107 |