JP2017124648A - 保舵状態検出装置及び保舵状態検出方法 - Google Patents
保舵状態検出装置及び保舵状態検出方法 Download PDFInfo
- Publication number
- JP2017124648A JP2017124648A JP2016003268A JP2016003268A JP2017124648A JP 2017124648 A JP2017124648 A JP 2017124648A JP 2016003268 A JP2016003268 A JP 2016003268A JP 2016003268 A JP2016003268 A JP 2016003268A JP 2017124648 A JP2017124648 A JP 2017124648A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- torque
- unit
- steering torque
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
Description
かかる保舵状態検出装置によれば、除去部によって、複数の操舵トルクの中から、ドライバがハンドルを把持した際に加わる操舵トルク以外の成分に起因するトルク値を除去できる。これにより、ハンドルの手放し状態時に検出される操舵トルクのトルク値が0又は0付近に集中するので、ハンドルの手放し状態を容易かつ迅速に検出できる。
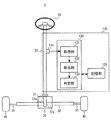
本発明に係る保舵状態検出装置の構成を説明する前に、図1を参照しながら、保舵状態検出装置100が搭載されている車両1の概要について説明する。
図1を参照しながら、保舵状態検出装置100の詳細構成について説明する。保舵状態検出装置100は、図1に示すように、検出部110と、記憶部120と、制御部130とを有する。
図5は、フィルタ処理されていない時系列データのトルク分布図である。図5(a)は、フィルタ処理されていない図2(a)の時系列データのトルク分布図を示し、図5(b)は、図2(b)の時系列データのトルク分布図を示している。図4(a)と図5(a)を対比すると分かるように、フィルタ処理していない場合には、時系列データにおけるトルク値の分布が大きくなっているため、標準偏差又は分散が大きくなる。これに対して、本実施形態のようにフィルタ処理した場合には、図4(a)に示すようにトルク値が0付近に集中することで、標準偏差又は分散が小さくなるため、ハンドル10の手放し状態を容易に検出できる。
図6を参照しながら、保舵状態検出装置100が行う保舵状態検出処理の流れについて説明する。保舵状態検出処理は、保舵状態検出装置100の制御部130が記憶部120に記憶されたプログラムを実行することで実現される。
上述した保舵状態検出装置100によれば、判定部133は、除去部132が高周波域の成分に起因するトルク値を除去した後の時系列データのばらつきを示す統計値(具体的には、標準偏差又は分散)を求める。そして、判定部133は、統計値が判定閾値よりも小さい場合に、ハンドル10の手放し状態と判定する。
かかる場合には、除去部132によって、時系列データの中から、ドライバがハンドル10を把持した際に加わる操舵トルク以外の成分に起因するトルク値を除去できる。これにより、ハンドル10の手放し状態時に検出される時系列データのトルク値が0又は0付近に集中するので、ハンドル10の手放し状態を容易かつ迅速に検出できる。
10 ハンドル
20 操舵軸
100 保舵状態検出装置
110 検出部
130 制御部
131 取得部
132 除去部
133 判定部
Claims (4)
- ハンドルに加わる操舵トルクを検出する検出部と、
前記検出部が所定時間内に検出した複数の操舵トルクの中から、周波数が所定値よりも大きい操舵トルクを除去する除去部と、
前記除去部が除去した後の複数の操舵トルクのトルク値のばらつきを示す統計値を求め、前記統計値が所定値よりも小さい場合に、前記ハンドルが保舵されていない状態を示す手放し状態であると判定する判定部と、
を備える、保舵状態検出装置。 - 前記判定部は、
前記統計値として前記トルク値の標準偏差又は分散を求め、
前記トルク値の標準偏差又は分散が前記所定値よりも小さい場合に、前記手放し状態であると判定する、
請求項1に記載の保舵状態検出装置。 - 前記検出部が前記所定時間内に連続して検出した操舵トルクの時系列データを取得する取得部を更に備え、
前記除去部は、前記取得部が取得した前記時系列データの中から、前記所定値よりも大きい周波数域の操舵トルクを除去するフィルタ処理を行う、
請求項1又は2に記載の保舵状態検出装置。 - ハンドルに加わる操舵トルクを検出するステップと、
所定時間内に検出した複数の操舵トルクの中から、周波数が所定値よりも大きい操舵トルクを除去するステップと、
除去した後の複数の操舵トルクのトルク値のばらつきを示す統計値を求め、前記統計値が所定値よりも小さい場合に、前記ハンドルが保舵されていない状態を示す手放し状態であると判定するステップと、
を備える、保舵状態検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016003268A JP6623770B2 (ja) | 2016-01-12 | 2016-01-12 | 保舵状態検出装置及び保舵状態検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016003268A JP6623770B2 (ja) | 2016-01-12 | 2016-01-12 | 保舵状態検出装置及び保舵状態検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017124648A true JP2017124648A (ja) | 2017-07-20 |
| JP6623770B2 JP6623770B2 (ja) | 2019-12-25 |
Family
ID=59364814
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016003268A Active JP6623770B2 (ja) | 2016-01-12 | 2016-01-12 | 保舵状態検出装置及び保舵状態検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6623770B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200031544A (ko) * | 2018-09-14 | 2020-03-24 | 아우디 아게 | 운전자에 의한 스티어링 개입을 결정하기 위한 시스템 및 방법 |
| JP2020179764A (ja) * | 2019-04-25 | 2020-11-05 | いすゞ自動車株式会社 | 保舵状態検出装置 |
| WO2021261492A1 (ja) * | 2020-06-23 | 2021-12-30 | いすゞ自動車株式会社 | 操舵制御システム、電動パワーステアリング装置および操舵制御プログラム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007112366A (ja) * | 2005-10-24 | 2007-05-10 | Nissan Motor Co Ltd | パワーステアリング装置 |
| JP2009248599A (ja) * | 2008-04-01 | 2009-10-29 | Toyota Motor Corp | 操舵支援装置 |
| JP2010036755A (ja) * | 2008-08-06 | 2010-02-18 | Fuji Heavy Ind Ltd | 操舵支援装置 |
| JP2010202048A (ja) * | 2009-03-03 | 2010-09-16 | Mazda Motor Corp | 車両用保舵状態検出装置 |
| WO2012147661A1 (ja) * | 2011-04-27 | 2012-11-01 | 本田技研工業株式会社 | 車両用操舵装置 |
| JP2015182517A (ja) * | 2014-03-20 | 2015-10-22 | トヨタ自動車株式会社 | 操舵意思判定装置及び車両制御装置 |
| US20160107597A1 (en) * | 2014-10-17 | 2016-04-21 | Hyundai Motor Company | Apparatus and method for controlling lane keeping of vehicle |
| JP2017024512A (ja) * | 2015-07-21 | 2017-02-02 | いすゞ自動車株式会社 | 保舵状態検出装置及び運転支援装置 |
-
2016
- 2016-01-12 JP JP2016003268A patent/JP6623770B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007112366A (ja) * | 2005-10-24 | 2007-05-10 | Nissan Motor Co Ltd | パワーステアリング装置 |
| JP2009248599A (ja) * | 2008-04-01 | 2009-10-29 | Toyota Motor Corp | 操舵支援装置 |
| JP2010036755A (ja) * | 2008-08-06 | 2010-02-18 | Fuji Heavy Ind Ltd | 操舵支援装置 |
| JP2010202048A (ja) * | 2009-03-03 | 2010-09-16 | Mazda Motor Corp | 車両用保舵状態検出装置 |
| WO2012147661A1 (ja) * | 2011-04-27 | 2012-11-01 | 本田技研工業株式会社 | 車両用操舵装置 |
| JP2015182517A (ja) * | 2014-03-20 | 2015-10-22 | トヨタ自動車株式会社 | 操舵意思判定装置及び車両制御装置 |
| US20160107597A1 (en) * | 2014-10-17 | 2016-04-21 | Hyundai Motor Company | Apparatus and method for controlling lane keeping of vehicle |
| JP2017024512A (ja) * | 2015-07-21 | 2017-02-02 | いすゞ自動車株式会社 | 保舵状態検出装置及び運転支援装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200031544A (ko) * | 2018-09-14 | 2020-03-24 | 아우디 아게 | 운전자에 의한 스티어링 개입을 결정하기 위한 시스템 및 방법 |
| KR102214892B1 (ko) | 2018-09-14 | 2021-02-10 | 아우디 아게 | 운전자에 의한 스티어링 개입을 결정하기 위한 시스템 및 방법 |
| JP2020179764A (ja) * | 2019-04-25 | 2020-11-05 | いすゞ自動車株式会社 | 保舵状態検出装置 |
| JP7207136B2 (ja) | 2019-04-25 | 2023-01-18 | いすゞ自動車株式会社 | 保舵状態検出装置 |
| WO2021261492A1 (ja) * | 2020-06-23 | 2021-12-30 | いすゞ自動車株式会社 | 操舵制御システム、電動パワーステアリング装置および操舵制御プログラム |
| JP2022002928A (ja) * | 2020-06-23 | 2022-01-11 | いすゞ自動車株式会社 | 操舵制御システム、電動パワーステアリング装置および操舵制御プログラム |
| JP7347346B2 (ja) | 2020-06-23 | 2023-09-20 | いすゞ自動車株式会社 | 操舵制御システム、電動パワーステアリング装置および操舵制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6623770B2 (ja) | 2019-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107891909B (zh) | 具有抓握感测的转向补偿 | |
| JP6623770B2 (ja) | 保舵状態検出装置及び保舵状態検出方法 | |
| US9199666B2 (en) | Method for securing the control of the rear wheels of a motor vehicle provided with an electric power steering system | |
| EP2945843B1 (de) | Verfahren und vorrichtung zur detektion einer wartungssituation bei einem zweirad | |
| JP2014021913A (ja) | 運転支援装置 | |
| WO2017014128A1 (ja) | 保舵状態検出装置及び運転支援装置 | |
| JP2016150589A (ja) | ドライバ状態判定装置 | |
| JP2005162105A (ja) | 操舵制御装置 | |
| US9037351B2 (en) | Steering control device | |
| JP2012063184A (ja) | ヨーレート較正装置 | |
| JP6151849B2 (ja) | 電動パワーステアリング装置及び電動パワーステアリング装置の制御装置 | |
| JP6865966B2 (ja) | 歩行型作業車両用の危険挙動検出装置 | |
| WO2018025902A1 (ja) | 操舵補助装置及び操舵補助方法 | |
| US8364341B2 (en) | Method for controlling a driver assistance system | |
| JP7207136B2 (ja) | 保舵状態検出装置 | |
| JP6582543B2 (ja) | 異常検出装置 | |
| JP2017033080A (ja) | 方向指示器制御装置 | |
| JP6358119B2 (ja) | ホイールベース算出装置、およびそれを用いた運転支援装置 | |
| JP5614940B2 (ja) | 運転支援装置 | |
| JP5376040B2 (ja) | 路面摩擦係数推定装置 | |
| JP2022118891A (ja) | ステアリング装置の保持状態判定装置、判定方法、およびプログラム | |
| JP2018034770A (ja) | 車両用制御装置 | |
| JP2009227102A (ja) | 車両挙動制御装置 | |
| JPH05229444A (ja) | 4輪操舵車の後輪操舵制御装置 | |
| JP2008260357A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181225 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191017 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191029 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191111 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6623770 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |