JP2016003673A - 車両用駆動装置の制御装置 - Google Patents
車両用駆動装置の制御装置 Download PDFInfo
- Publication number
- JP2016003673A JP2016003673A JP2014122875A JP2014122875A JP2016003673A JP 2016003673 A JP2016003673 A JP 2016003673A JP 2014122875 A JP2014122875 A JP 2014122875A JP 2014122875 A JP2014122875 A JP 2014122875A JP 2016003673 A JP2016003673 A JP 2016003673A
- Authority
- JP
- Japan
- Prior art keywords
- clutch
- torque
- transmission path
- belt
- continuously variable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 257
- 230000008859 change Effects 0.000 claims abstract description 178
- 230000007246 mechanism Effects 0.000 claims abstract description 147
- ATJFFYVFTNAWJD-UHFFFAOYSA-N Tin Chemical compound [Sn] ATJFFYVFTNAWJD-UHFFFAOYSA-N 0.000 abstract description 75
- 230000009467 reduction Effects 0.000 abstract description 3
- 101100512254 Rattus norvegicus Magi3 gene Proteins 0.000 description 12
- 239000003921 oil Substances 0.000 description 12
- 230000007423 decrease Effects 0.000 description 10
- 238000000034 method Methods 0.000 description 8
- 241001125929 Trisopterus luscus Species 0.000 description 7
- 239000000446 fuel Substances 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 230000007704 transition Effects 0.000 description 6
- 238000002347 injection Methods 0.000 description 5
- 239000007924 injection Substances 0.000 description 5
- 229910000831 Steel Inorganic materials 0.000 description 3
- 230000033001 locomotion Effects 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- 239000012530 fluid Substances 0.000 description 2
- 239000010720 hydraulic oil Substances 0.000 description 2
- YYYMFKRTPPSNJH-UHFFFAOYSA-N [Sn+] Chemical compound [Sn+] YYYMFKRTPPSNJH-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000009699 differential effect Effects 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000004080 punching Methods 0.000 description 1
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/12—Gearings comprising primarily toothed or friction gearing, links or levers, and cams, or members of at least two of these types
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
- F16H61/66272—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members characterised by means for controlling the torque transmitting capability of the gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/06—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts
- F16H37/08—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing
- F16H37/0833—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths
- F16H37/084—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths at least one power path being a continuously variable transmission, i.e. CVT
- F16H37/0846—CVT using endless flexible members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/021—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings toothed gearing combined with continuous variable friction gearing
- F16H2037/026—CVT layouts with particular features of reversing gear, e.g. to achieve compact arrangement
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/06—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts
- F16H37/08—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing
- F16H37/0833—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths
- F16H37/084—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing with arrangements for dividing torque between two or more intermediate shafts, i.e. with two or more internal power paths at least one power path being a continuously variable transmission, i.e. CVT
- F16H2037/0866—Power split variators with distributing differentials, with the output of the CVT connected or connectable to the output shaft
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/12—Gearings comprising primarily toothed or friction gearing, links or levers, and cams, or members of at least two of these types
- F16H2037/128—Generating reciprocating motion by a planetary gear (ratio 2:1) using endless flexible members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/021—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings toothed gearing combined with continuous variable friction gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/021—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings toothed gearing combined with continuous variable friction gearing
- F16H37/022—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings toothed gearing combined with continuous variable friction gearing the toothed gearing having orbital motion
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control Of Transmission Device (AREA)
- Transmission Devices (AREA)
Abstract
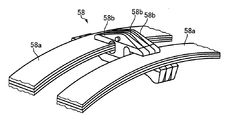
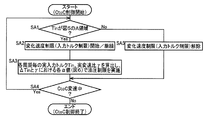
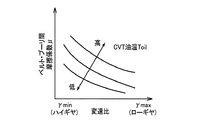
【解決手段】入力トルクTinの変化に対する伝動ベルト58のスリップ率SLIP(γ)の変化速度ΔSLIP(γ)が予め設定されている許容スリップ率変化速度を超える領域では、入力トルクTinの変化速度に制限をかけることで、スリップ率SLIP(γ)の急変化が抑制される。このスリップ率SLIP(γ)の急変化が抑制されことで、伝動ベルト58にかかる負荷が抑制されるため、伝動ベルト58の耐久性低下を抑制することができる。
【選択図】図7
Description
SLIPr(γ)=1-Nout(Tin)/Nout(Tin=0)・・・(1)
14:エンジン(駆動力源)
20:ベルト式無段変速機構(無段変速機構)
22:ギヤ機構(伝動機構)
25:出力軸
26:タービン軸(入力軸)
54:プライマリプーリ(プーリ)
56:セカンダリプーリ(プーリ)
58:伝動ベルト
70:駆動輪
80、152:電子制御装置(制御装置)
Ca:前進用クラッチ(第2クラッチ、クラッチ機構)
Cb:ベルト走行用クラッチ(第1クラッチ、クラッチ機構)
Claims (4)
- 駆動力源から出力されたトルクが伝達される入力軸と、駆動輪に対してトルクを出力する出力軸との間に、一対のプーリと該一対のプーリの間に巻き掛けられた伝動ベルトとを含んで構成されるベルト式の無段変速機構と、少なくとも1つのギヤ比を有する伝動機構と、前記無段変速機構を介してトルクを伝達可能な第1伝達経路と前記伝動機構を介してトルクを伝達可能な第2伝達経路とを選択的に切り替えるクラッチ機構とを、備える車両用駆動装置において、車両の走行状態に応じて前記第1伝達経路と前記第2伝達経路との間でトルク伝達経路を選択的に切り替える車両用駆動装置の制御装置であって、
前記クラッチ機構が操作されて前記第1伝達経路と前記第2伝達経路との間でトルク伝達経路が切り替えられるとき、前記無段変速機構へ入力される入力トルクが、該入力トルクの変化に対する前記伝動ベルトのスリップ率の変化速度が所定の基準値を超える領域にある場合には、前記入力トルクの変化速度を所定の上限変化速度以下に制限することを特徴とする車両用駆動装置の制御装置。 - 駆動力源から出力されたトルクが伝達される入力軸と、駆動輪に対してトルクを出力する出力軸との間に、一対のプーリと該一対のプーリの間に巻き掛けられた伝動ベルトとを含んで構成されるベルト式の無段変速機構と、少なくとも1つのギヤ比を有する伝動機構と、前記無段変速機構を介してトルクを伝達可能な第1伝達経路と前記伝動機構を介してトルクを伝達可能な第2伝達経路とを選択的に切り替えるクラッチ機構とを、備える車両用駆動装置において、車両の走行状態に応じて前記第1伝達経路と前記第2伝達経路との間でトルク伝達経路を選択的に切り替える車両用駆動装置の制御装置であって、
前記クラッチ機構が操作されて前記第1伝達経路と前記第2伝達経路との間でトルク伝達経路が切り替えられるとき、前記伝動ベルトの実スリップ率の変化速度を算出し、算出された前記実スリップ率の変化速度が予め設定された所定の閾値よりも大きい場合、前記無段変速機構へ入力される入力トルクの変化速度を所定の上限変化速度以下に制限することを特徴とする車両用駆動装置の制御装置。 - 前記クラッチ機構は、係合されることで前記第1伝達経路を形成する油圧式の第1クラッチと、係合されることで前記第2伝達経路を形成する油圧式の第2クラッチとを、含み、
前記第1クラッチと前記第2クラッチとを掴み替える際のクラッチ油圧を制御することで、前記無段変速機構へ入力される入力トルクの変化速度を所定の上限変化速度以下に制限することを特徴とする請求項1または2の車両用駆動装置の制御装置。 - 前記駆動力源の出力を制御することで、前記無段変速機構へ入力される入力トルクの変化速度を所定の上限変化速度以下に制限することを特徴とする請求項1または2の車両用駆動装置の制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014122875A JP6119676B2 (ja) | 2014-06-13 | 2014-06-13 | 車両用駆動装置の制御装置 |
| PCT/IB2015/001001 WO2015189688A1 (en) | 2014-06-13 | 2015-06-12 | Driving system for vehicle |
| US15/316,674 US10066746B2 (en) | 2014-06-13 | 2015-06-12 | Driving system for vehicle |
| CN201580030913.0A CN106461045B (zh) | 2014-06-13 | 2015-06-12 | 用于车辆的驱动系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014122875A JP6119676B2 (ja) | 2014-06-13 | 2014-06-13 | 車両用駆動装置の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016003673A true JP2016003673A (ja) | 2016-01-12 |
| JP6119676B2 JP6119676B2 (ja) | 2017-04-26 |
Family
ID=53762218
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014122875A Active JP6119676B2 (ja) | 2014-06-13 | 2014-06-13 | 車両用駆動装置の制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10066746B2 (ja) |
| JP (1) | JP6119676B2 (ja) |
| CN (1) | CN106461045B (ja) |
| WO (1) | WO2015189688A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018084275A (ja) * | 2016-11-22 | 2018-05-31 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| US10443713B2 (en) | 2016-12-24 | 2019-10-15 | Toyota Jidosha Kabushiki Kaisha | Control device for vehicle drive system |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2024051435A (ja) * | 2022-09-30 | 2024-04-11 | 株式会社Subaru | 無段変速機 |
| WO2017073552A1 (ja) * | 2015-10-30 | 2017-05-04 | アイシン・エィ・ダブリュ株式会社 | 自動変速機 |
| JP7229744B2 (ja) | 2017-12-15 | 2023-02-28 | サカタインクス株式会社 | 水性フレキソ印刷インキ組成物 |
| JP6879196B2 (ja) * | 2017-12-27 | 2021-06-02 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP7024473B2 (ja) * | 2018-02-07 | 2022-02-24 | トヨタ自動車株式会社 | 車両の制御装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0454363A (ja) * | 1990-06-20 | 1992-02-21 | Fuji Heavy Ind Ltd | 無段変速機の制御装置 |
| JP2009522514A (ja) * | 2005-12-28 | 2009-06-11 | ロベルト ボッシュ ゲゼルシャフト ミト ベシュレンクテル ハフツング | 車両の駆動系におけるベルト式無段変速機および摩擦クラッチの制御方法 |
| JP2010163157A (ja) * | 2008-12-18 | 2010-07-29 | Nissan Motor Co Ltd | ベルト式無段変速機の制御装置 |
| WO2013176208A1 (ja) * | 2012-05-23 | 2013-11-28 | トヨタ自動車株式会社 | 車両用動力伝達装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3597808B2 (ja) * | 2001-09-28 | 2004-12-08 | トヨタ自動車株式会社 | 無段変速機の滑り検出装置 |
| JP2004316843A (ja) | 2003-04-18 | 2004-11-11 | Jatco Ltd | ベルト式無段変速機の制御装置 |
| JP2010242935A (ja) | 2009-04-09 | 2010-10-28 | Toyota Motor Corp | 車両の制御装置 |
| CN102414486B (zh) * | 2009-04-30 | 2014-08-06 | 日产自动车株式会社 | 带式无级变速器的控制器和控制方法 |
| JP4809460B2 (ja) * | 2009-06-10 | 2011-11-09 | 日産自動車株式会社 | Vベルト式無段変速機搭載車のベルトスリップ時駆動力制御装置 |
| CN103732954B (zh) * | 2011-08-31 | 2015-11-25 | 加特可株式会社 | 车辆控制装置及车辆控制方法 |
-
2014
- 2014-06-13 JP JP2014122875A patent/JP6119676B2/ja active Active
-
2015
- 2015-06-12 US US15/316,674 patent/US10066746B2/en active Active
- 2015-06-12 CN CN201580030913.0A patent/CN106461045B/zh active Active
- 2015-06-12 WO PCT/IB2015/001001 patent/WO2015189688A1/en active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0454363A (ja) * | 1990-06-20 | 1992-02-21 | Fuji Heavy Ind Ltd | 無段変速機の制御装置 |
| JP2009522514A (ja) * | 2005-12-28 | 2009-06-11 | ロベルト ボッシュ ゲゼルシャフト ミト ベシュレンクテル ハフツング | 車両の駆動系におけるベルト式無段変速機および摩擦クラッチの制御方法 |
| JP2010163157A (ja) * | 2008-12-18 | 2010-07-29 | Nissan Motor Co Ltd | ベルト式無段変速機の制御装置 |
| WO2013176208A1 (ja) * | 2012-05-23 | 2013-11-28 | トヨタ自動車株式会社 | 車両用動力伝達装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018084275A (ja) * | 2016-11-22 | 2018-05-31 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| US10443713B2 (en) | 2016-12-24 | 2019-10-15 | Toyota Jidosha Kabushiki Kaisha | Control device for vehicle drive system |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106461045A (zh) | 2017-02-22 |
| WO2015189688A8 (en) | 2016-12-22 |
| US20170159814A1 (en) | 2017-06-08 |
| JP6119676B2 (ja) | 2017-04-26 |
| US10066746B2 (en) | 2018-09-04 |
| WO2015189688A1 (en) | 2015-12-17 |
| CN106461045B (zh) | 2019-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6119676B2 (ja) | 車両用駆動装置の制御装置 | |
| JP5790672B2 (ja) | 車両の変速制御装置 | |
| JP5811203B2 (ja) | 車両用駆動装置の制御装置 | |
| US10207714B2 (en) | Control device for continuously variable transmission | |
| JP6070623B2 (ja) | 車両の制御装置 | |
| JP6176203B2 (ja) | 車両の制御装置 | |
| CN110388433B (zh) | 车辆用动力传递装置的控制装置 | |
| WO2015181615A1 (en) | Control apparatus for vehicle transmission | |
| US10683931B2 (en) | Control apparatus for vehicle drive-force transmitting apparatus | |
| JP5724966B2 (ja) | 車両の変速制御装置 | |
| US10663061B2 (en) | Control apparatus for vehicle drive-force transmitting apparatus | |
| CN110118249B (zh) | 车辆用动力传递装置的控制装置 | |
| JP2017036783A (ja) | 動力伝達装置の制御装置 | |
| JP2019095013A (ja) | 車両用動力伝達装置の制御装置 | |
| WO2015166879A1 (ja) | 車両の制御装置 | |
| JP2017106501A (ja) | 動力伝達装置の制御装置 | |
| JP2016128714A (ja) | 車両用動力伝達装置の制御装置 | |
| CN109973644B (zh) | 车辆用动力传递装置的控制装置 | |
| JP2013152008A (ja) | ベルト式無段変速機の制御装置 | |
| JP2015232380A (ja) | 車両用駆動装置の制御装置 | |
| JP2014177974A (ja) | ベルト式無段変速機の制御装置 | |
| JP2019173884A (ja) | 車両用動力伝達装置の制御装置 | |
| JP2019173769A (ja) | 車両用動力伝達装置の制御装置 | |
| JP2019120280A (ja) | 車両用動力伝達装置の制御装置 | |
| JP2016080011A (ja) | 車両用動力伝達装置の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160419 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170228 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170313 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6119676 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |