JP2015520380A - マルチモード検出 - Google Patents
マルチモード検出 Download PDFInfo
- Publication number
- JP2015520380A JP2015520380A JP2015515355A JP2015515355A JP2015520380A JP 2015520380 A JP2015520380 A JP 2015520380A JP 2015515355 A JP2015515355 A JP 2015515355A JP 2015515355 A JP2015515355 A JP 2015515355A JP 2015520380 A JP2015520380 A JP 2015520380A
- Authority
- JP
- Japan
- Prior art keywords
- detection
- particle
- particles
- smoke
- air volume
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 465
- 239000002245 particle Substances 0.000 claims abstract description 470
- 239000000779 smoke Substances 0.000 claims abstract description 153
- 238000000034 method Methods 0.000 claims abstract description 94
- 230000005855 radiation Effects 0.000 claims description 215
- 238000004458 analytical method Methods 0.000 claims description 53
- 238000012795 verification Methods 0.000 claims description 34
- 230000000007 visual effect Effects 0.000 claims description 26
- 238000012360 testing method Methods 0.000 claims description 22
- 230000008569 process Effects 0.000 claims description 15
- 230000003213 activating effect Effects 0.000 claims description 14
- 239000000126 substance Substances 0.000 claims description 12
- 230000004913 activation Effects 0.000 claims description 7
- 230000008859 change Effects 0.000 claims description 6
- 238000005259 measurement Methods 0.000 claims description 3
- 238000009434 installation Methods 0.000 claims description 2
- 230000003993 interaction Effects 0.000 claims description 2
- 230000002123 temporal effect Effects 0.000 claims description 2
- 238000012546 transfer Methods 0.000 claims description 2
- 238000011179 visual inspection Methods 0.000 claims description 2
- 238000005979 thermal decomposition reaction Methods 0.000 abstract description 2
- 238000005070 sampling Methods 0.000 description 26
- 238000012544 monitoring process Methods 0.000 description 22
- 230000007246 mechanism Effects 0.000 description 17
- 230000001960 triggered effect Effects 0.000 description 16
- 230000000875 corresponding effect Effects 0.000 description 14
- 238000004891 communication Methods 0.000 description 13
- 230000003287 optical effect Effects 0.000 description 10
- 230000004044 response Effects 0.000 description 10
- 230000003434 inspiratory effect Effects 0.000 description 7
- 230000035945 sensitivity Effects 0.000 description 6
- 230000009471 action Effects 0.000 description 5
- 238000001994 activation Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 238000012549 training Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 238000011835 investigation Methods 0.000 description 3
- 230000000670 limiting effect Effects 0.000 description 3
- 239000004509 smoke generator Substances 0.000 description 3
- 238000012790 confirmation Methods 0.000 description 2
- 230000002596 correlated effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000002829 reductive effect Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000004879 turbidimetry Methods 0.000 description 2
- 238000004378 air conditioning Methods 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 230000005670 electromagnetic radiation Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000011164 primary particle Substances 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000011895 specific detection Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000000153 supplemental effect Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000010998 test method Methods 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
- 238000001429 visible spectrum Methods 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B17/00—Fire alarms; Alarms responsive to explosion
- G08B17/10—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/40—Analysis of texture
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B17/00—Fire alarms; Alarms responsive to explosion
- G08B17/12—Actuation by presence of radiation or particles, e.g. of infrared radiation or of ions
- G08B17/125—Actuation by presence of radiation or particles, e.g. of infrared radiation or of ions by using a video camera to detect fire or smoke
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B29/00—Checking or monitoring of signalling or alarm systems; Prevention or correction of operating errors, e.g. preventing unauthorised operation
- G08B29/18—Prevention or correction of operating errors
- G08B29/183—Single detectors using dual technologies
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30232—Surveillance
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B17/00—Fire alarms; Alarms responsive to explosion
- G08B17/10—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means
- G08B17/11—Actuation by presence of smoke or gases, e.g. automatic alarm devices for analysing flowing fluid materials by the use of optical means using an ionisation chamber for detecting smoke or gas
- G08B17/113—Constructional details
Abstract
Description
煙をサンプリング流入口に送る(とともに、好ましくは煙を生成する)機構と、
ビデオセキュリティシステムによって捕捉される画像での装置の検出を可能にする手段及び任意選択的に、この光学手段を介してデータを通信する手段と、
装置の動作を、粒子検出システム及び/又はセキュリティシステムと同期させる手段と、
を含む。
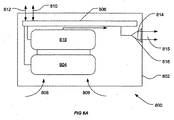
・デバイス装置2700の動作を制御するコントローラ2702と、
・通常は電池である電源2704と、
・必要に応じて、サンプリングポイントに導入するテスト煙を生成する煙生成器2706と、
・煙を輸送ポイントに押し出すファン2710と、
・煙生成器2706によって生成された煙を輸送ポイントまで案内するダクト2712(この例では、ダクト2712は延長可能であり、例えば、伸縮自在管であり、異なる高さにあるサンプリングポイントとの都合のよい併用及び都合のよい装置格納を可能にする。ダクト2712は、サンプリングポイント又はその周囲への容易な結合を可能にするような形状の流出ポート2714において終端する。この例では、流出ポート2714は、サンプリングポイントに入るか、又は周囲に嵌ることができる漏斗形状の流出ポートである。)と、
・1つ又は複数の制御ボタン2718と、タッチスクリーンディスプレイ2720とを含むユーザインタフェース2716と(これらは、当業者に既知のように、後述するように、装置2700の動作を制御し、データを入力するように構成することができる。)、
・外部装置、例えば、煙検出システム、ビデオセキュリティシステム、又はこれらのシステムの要素とのデータ通信を確立する有線又は無線通信手段であることができる同期ポート2722(ポート2722が無線である場合、ポート2722をリアルタイム通信に使用することができる。ポート2722が物理的接続を行うように構成される場合、通信は、リアルタイム(例えば、使用中に他のシステムに差し込まれる)又は非同期(例えば、記憶されたデータの共有及び/又は使用後の煙検出システム及びビデオセキュリティシステムのうちの一方又は両方との装置の同期)で行うことができる。)と、
・放射線エミッタ2724.1、2724.2、2724.3の構成を含む視覚的通信システム2724(視覚的通信システムを使用して、後述するように、装置2700の使用中にセキュリティシステムと通信することができる。視覚的通信システム2724は、受信でき、ビデオ監視システムに中継することができる限り、可視又は不可視の干す波線を放射し得る。最も好ましくは、放射線は、セキュリティシステムによって受信され、領域のビデオ画像において捕捉される。このようにして、装置2700の存在(及び任意選択的にはデータ)が、視覚的通信システム2724の状態によって伝達される。)と、を備える。

Claims (69)
- 空気容量中の粒子を検出する粒子検出装置であって、
空気容量を表す空気サンプルの中の粒子の存在を検出する内部検出器と、
空気容量の少なくとも一部を通して放射線ビームを投射して、空気容量中の粒子と相互作用し、それにより、空気容量中の粒子の存在の検出を可能にする少なくとも1つの放射線エミッタと、
を含む、装置。 - 前記放射線ビームの少なくとも一部からの放射線を検知するように位置決めされる少なくとも1つのセンサを更に含む、請求項1に記載の装置。
- 空気容量中の粒子を検出する粒子検出装置であって、
空気容量を表す空気サンプルの中の粒子の存在を検出する内部検出器と、
空気容量を通る放射線ビームの少なくとも一部から情報を取得し、取得された相互作用を解析して、空気容量中の粒子の存在を示すように位置決めされる少なくとも1つのセンサと、
を含む、装置。 - 前記センサは、前記放射線ビームの少なくとも一部の画像を捕捉するように位置決めされるカメラである、請求項2又は3に記載の装置。
- 空気容量中の粒子を検出する粒子検出装置であって、
空気容量を表す空気サンプルの中の粒子の存在を検出する内部検出器と、
空気容量の一連の画像を捕捉し、空気容量中の粒子の検出を可能にするように構成される少なくとも1つのカメラと、
を含む、装置。 - 前記一連の画像を解析して、空気容量中の粒子の存在を検出するプロセッサシステムを更に含む、請求項6に記載の装置。
- 前記プロセッサは、ビデオ解析技法を適用して、噴煙及び/又は炎のうちの何れか1つ又は複数が、前記一連の画像内に存在することを検出する、請求項6に記載の装置。
- 前記プロセッサは、前記一連の画像において、前記容量中に放射される放射線の存在を検出し、それにより、前記放射された放射線と相互作用する粒子を検出するように構成される、請求項6又は7に記載の装置。
- 前記粒子は、煙又は火の存在を示す粒子である、請求項1〜8のいずれか1項に記載の装置。
- 請求項1〜8のいずれか1項に記載の装置を含む粒子検出システム。
- 空気容量中の粒子を検出するマルチモード粒子検出システムであって、
少なくとも1つの粒子検出装置を含み、前記装置は、
空気容量を表す空気サンプルの中の粒子の存在を検出する内部検出器と、
空気容量の少なくとも一部を通る放射線ビームを投射する少なくとも1つの放射線エミッタと、
を含み、前記システムは、
前記放射線ビームの少なくとも一部から情報を取得するように位置決めされる少なくとも1つのセンサと、
前記放射線ビームの少なくとも前記一部からの前記情報を解析して、空気容量中の粒子を検出する解析手段と、
を更に含む、システム。 - 前記少なくとも1つのセンサは、前記粒子検出装置の構成要素として統合される、請求項11に記載のシステム。
- 前記少なくとも1つのセンサは、前記粒子検出装置とは別個である、請求項11に記載のシステム。
- 空気容量中の粒子を検出するマルチモード粒子検出システムであって、
少なくとも1つの粒子検出装置を含み、前記装置は、
空気容量を表す空気サンプルの中の粒子の存在を検出する内部検出器と、
前記放射線ビームの少なくとも一部から情報を取得するように位置決めされる少なくとも1つのセンサと、
を含み、前記システムは、
空気容量の少なくとも一部を通る放射線ビームを投射する少なくとも1つの放射線エミッタと、
前記放射線ビームの少なくとも前記一部からの前記情報を解析して、空気容量中の粒子を検出する解析手段と、
を更に含む、システム。 - 前記少なくとも1つの放射線エミッタは、前記粒子検出装置の構成要素として統合される、請求項14に記載のシステム。
- 前記少なくとも1つの放射線エミッタは、前記粒子検出装置とは別個である、請求項14又は15に記載のシステム。
- 空気容量中の粒子を検出するマルチモード粒子検出システムであって、
空気容量中の粒子の存在を検出する内部検出器を有する粒子検出装置を含む、内部検出モードを定義する装置と、
外部検出モードを定義する装置と、
を含み、前記外部検出モードを定義する装置は、
空気容量の少なくとも一部を通る放射線ビームを投射する少なくとも1つの放射線エミッタと、
前記放射線ビームの少なくとも一部から情報を取得するように位置決めされる少なくとも1つのセンサと、
前記放射線ビームの少なくとも前記一部からの前記情報を解析して、空気容量中の粒子を検出する解析手段と、
を含み、
前記内部検出モードの粒子検出装置及び前記外部検出モードの前記少なくとも1つの放射線エミッタ又は前記少なくとも1つのセンサのうちの両方又は一方は、一体装置を形成する、システム。 - 前記放射線ビームを反射するか、又はリダイレクトする反射器を更に含む、請求項10〜17のいずれか1項に記載のシステム。
- 前記少なくとも1つのセンサは、前記放射線ビームの少なくとも一部の画像を捕捉するように位置決めされるカメラである、請求項10〜18のいずれか1項に記載のシステム。
- 前記カメラは、前記粒子検出装置とは別個の装置である、請求項19に記載のシステム。
- 前記カメラは粒子検出装置に統合される、請求項19に記載のシステム。
- 前記解析手段は、前記画像で捕捉される散乱放射線を使用して、粒子が空気容量中に存在するか否かを判断する、請求項19〜21のいずれか1項に記載のシステム。
- 請求項10〜22のいずれか1項に記載のマルチモード粒子検出システムの設置。
- 粒子を検出するための、請求項10〜22のいずれか1項に記載のマルチモード粒子検出システムの使用。
- 容量中の粒子を検出する方法であって、
空気の前記容量の一部を表す空気サンプルを解析するステップであって、それにより、内部粒子検出器を有する粒子検出装置を使用して、第1の検出モードに従って粒子を検出する解析ステップと、
少なくとも1つの粒子検出基準が、前記第1の検出モードで満たされる場合、第2の検出モードをアクティブ化するステップと、
を含み、
前記アクティブ化するステップは、
空気容量の少なくとも一部を通して放射線ビームを投射するステップと、
前記放射線ビームの少なくとも一部から情報を取得するステップと、
前記放射線ビームの少なくとも一部からの前記情報を解析するステップであって、それにより、空気容量中の粒子を検出する解析するステップと、
を含み、
(i)前記放射線ビームを投射するステップ及び(ii)前記放射線ビームの少なくとも一部についての情報を取得するステップのうちの少なくとも一方のステップは、前記粒子検出装置を使用して行われる、方法。 - 空気容量中の粒子を検出する方法であって、
第1の検出モードに従って粒子を検出するステップを含み、前記検出するステップは、
空気容量の少なくとも一部を通して放射線ビームを投射するステップと、
前記放射線ビームの少なくとも一部から情報を取得するステップと、
前記放射線ビームの少なくとも一部からの前記情報を解析するステップであって、それにより、空気容量中の粒子を検出する解析ステップと、
少なくとも1つの粒子検出基準が、前記第1の検出モードにおいて満たされる場合、第2の検出モードをアクティブ化するステップと、
を含み、
前記アクティブ化するステップは、空気容量の一部を表す空気サンプルを解析するステップであって、それにより、内部粒子検出器を有する粒子検出装置を使用して粒子を検出する解析ステップを含み、
(i)前記放射線ビームを投射すること及び(ii)前記放射線ビームの少なくとも一部についての情報を取得することのうちの少なくとも一方のステップは、前記粒子検出装置を使用して行われる、方法。 - 前記放射線ビームの少なくとも一部についての情報を取得するステップは、前記放射線ビームの少なくとも一部の画像を捕捉するステップを含む、請求項25又は26に記載の方法。
- 前記情報を解析するステップは、粒子が、前記画像において捕捉される散乱放射線を使用して、空気容量中にあるか否かを判断するステップを含む、請求項27に記載の方法。
- 前記放射線ビームを投射するステップは、前記放射線ビームを反射器に投射するステップを含む、請求項25〜28のいずれか1項に記載の方法。
- ビデオ解析を使用する第3の検出モードを更に含む、請求項25〜29のいずれか1項に記載の方法。
- 前記ビデオ解析を実行して、粒子の存在を検証する、請求項30に記載の方法。
- アラートシステムであって、
煙及び/又は火の存在を示すセンサシステムから、検知された状況を示す信号を受信する少なくとも1つの第1の入力と、
ビデオ捕捉システムから導出される信号を受信する少なくとも1つの第2の入力と、
を含み、
前記アラートシステムは、前記少なくとも1つの第1の入力に基づいて第1のアラート状況を示し、前記検知される状況が、前記ビデオ捕捉システムから導出される前記信号によって検証される場合、第2のアラート状況を示すように構成される、アラートシステム。 - 前記アラートシステムは、前記ビデオ捕捉システムによって捕捉される一連の画像を前記第2の入力で受信し、前記画像を処理して、煙及び/又は火が前記一連の画像に存在するか否かを判断する、請求項32に記載のアラートシステム。
- 前記アラートシステムは、前記煙及び/又は火が、前記ビデオ捕捉システムによって捕捉される画像に存在することを示す信号を、前記ビデオ捕捉システムから前記第2の入力で受信する、請求項32に記載のアラートシステム。
- 前記ビデオ画像は、前記画像に存在すると判断される前記煙及び/又は火のロケーション、容量、形状、又は他のパラメータの視覚的指示を含む、請求項32〜34のいずれか1項に記載の方法。
- 複数のアラート状況を示すインタフェース部を含むアラートシステムのインタフェースであって、
火及び/又は煙検出に関連するアラート状況と、
火及び/又は煙検出に関連するアラート状況が検証されたことを示すように構成されるインタフェース要素と、
を含む、インタフェース。 - 前記インタフェース要素は、火及び/又は煙の検出に関連するアラート状況が、火又は煙について監視されている容量の1つ又は複数の画像に基づいて検証されたことを示すように構成される、請求項36に記載のインタフェース。
- 前記検証は、一連の画像を解析して、煙又は火の画像が前記捕捉画像に存在することを特定することによって自動的に実行される、請求項37に記載のインタフェース。
- 前記インタフェース要素は、アイコン、印、色選択、英数字インジケータ、示されるステータスレベル、又は表示スタイル若しくは順序でのバリエーション、又は前記アラート状況が検証されたことを伝える別のインタフェース要素の変更若しくは変調のうちの少なくとも1つを含む、請求項36〜38のいずれか1項に記載のインタフェース。
- 前記インタフェースは、前記ビデオ捕捉システムによって捕捉される画像の少なくとも一部を表示して、オペレータによる前記アラート状況の視覚的確認を可能にする部分を含む、請求項36〜39のいずれか1項に記載のインタフェース。
- 表示される前記画像の前記少なくとも一部は、前記画像に存在すると特定される煙及び/又は火のロケーション、容量、形状、又は他のパラメータの視覚的指示を含み得る、請求項40に記載のインタフェース。
- 各ロケーションに配置される複数のセンサに対応する煙及び/又は火検出データを受信するステップと、
前記各ロケーションの少なくとも1つの画像を受信するステップと、
インタフェースを提供するステップであって、
受信される煙及び/又は火検出データ、
前記各ロケーションの少なくとも1つの画像の解析、
前記ロケーションに関連する1つ又は複数の特性を記述するロケーションパラメータデータ
のうちの少なくとも1つに基づいて決定される優先度レベルに従って、前記各ロケーションの少なくとも1つの画像の表示を閲覧するインタフェースを提供するステップと、
を含む、方法。 - 前記受信される煙及び/又は火検出データに対応する1つ又は複数のアラートを生成するステップを含む、請求項42に記載の方法。
- 前記受信される煙及び/又は火検出データは、前記検出される煙及び/又は火の容量、並びに/或いは煙及び/又は火の前記容量の増大速度等のパラメータを含む、請求項42又は43に記載の方法。
- 前記優先度レベルに基づいて、受信される煙及び/又は火検出データに対応する前記1つ又は複数のアラートの表示に優先度を付与するステップを含む、請求項42〜44のいずれか1項に記載の方法。
- 火及び/又は煙検出に関連するアラート状況の前記優先度レベルは、少なくとも部分的に、
火、煙雲、又は粒子雲のうちの何れか1つの
サイズ、強度、密度、成長度
のうちの何れか1つ又は複数の自動測定に基づいて決定することができる、請求項42〜45のいずれか1項に記載の方法。 - 所与のアラートの場合、
受信される煙及び/又は火検出データ、
前記各ロケーションの少なくとも1つの画像の解析、
前記ロケーションに関連する1つ又は複数の特性を記述するロケーションパラメータデータ
のうちの何れか1つ又は複数に基づいて調査優先度を示すステップを含む、請求項42〜46のいずれか1項に記載の方法。 - 前記調査優先度を示すステップは、一連のロケーションの画像を表示すべきシーケンスを順序付けるステップを含み、前記調査優先度は、前記ロケーションの画像の視覚的検査により、前記アラートの原因の発端が発見される尤度を増大させるように決定される、請求項47に記載の方法。
- 前記ロケーションパラメータデータは、ロケーションの実際の位置、他のロケーションに相対する位置、前記ロケーションでの部屋若しくは他の物の構造、風速若しくは空気流速、方向、パターン、ロケーションの使用パターン、使用タイプ、又はHVACシステムパラメータ等の前記ロケーションに関連する特性を記述する、請求項42〜48のいずれか1項に記載の方法。
- 請求項42〜49のいずれか1項に記載の方法の少なくとも一部を実行するようにプログラムされた計算システム。
- 火及び/又は煙検出に関連するアラート状況と、火及び/又は煙検出に関連するアラート状況の優先度を示すように構成されるインタフェース要素とを含む、複数のアラート状況を示すインタフェース部を含むアラートシステムのインタフェース。
- 前記優先度は、少なくとも部分的に、前記アラートが検証されたか否かに基づいて決定される、請求項51に記載のインタフェース。
- 前記優先度は、監視されている容量の複数の画像の解析に基づく、請求項51に記載のインタフェース。
- 前記インタフェース要素は、火及び/又は煙の検出に関連するアラート状況が、火又は煙について監視されている容量の1つ又は複数の画像に基づいて検証されたことを示すように構成される、請求項51〜53のいずれか1項に記載のインタフェース。
- 前記インタフェースは、前記ビデオ捕捉システムによって捕捉される画像の少なくとも一部を表示して、オペレータによる前記アラート状況の視覚的確認を可能にする部分を含む、請求項51〜54のいずれか1項に記載のインタフェース。
- 表示される前記画像の前記少なくとも一部は、前記画像の前記少なくとも一部に存在すると特定される煙及び/又は火のロケーション、容量、形状、又は他のパラメータの視覚的指示を含む、請求項55に記載のインタフェース。
- ロケーションを保護するように構成される粒子検出器にテスト物質を届ける輸送システムと、
前記輸送システムをアクティブ化して、前記テスト物質を届けるアクティブ化手段と、
前記ロケーションの画像を捕捉するように構成される画像捕捉システムが、前記アクティブ化を自動的に検出することができるように、前記輸送システムの前記アクティブ化を通知するインジケータと、
を備える、装置。 - 前記アクティブ化に関するデータを前記装置に入力して、それにより、記憶又は送信できるようにするインタフェースを更に含む、請求項57に記載の装置。
- 前記輸送システムは、
テスト物質生成器、
テスト物質をテスト物質生成器から前記粒子検出器に輸送するダクト、
前記テスト物質を前記装置を通して前記粒子検出器に移動させるファン、ポンプ等、
のうちの少なくとも1つを含む、請求項57又は58に記載の装置。 - 前記インジケータは、画像での捕捉のために放射線を投射するように構成される1つ又は複数の放射線エミッタを備える、請求項57〜59のいずれか1項に記載の装置。
- 前記装置は同期ポートを備え、それにより、前記装置と外部装置との間でのデータ転送を可能にする、請求項57〜60のいずれか1項に記載の装置。
- 粒子検出システムにおける物理的なロケーションに対応するアドレスを、複数のロケーションを監視するビデオ捕捉システムで監視されているロケーションに相関付ける方法であって、
前記アドレスにおいて前記粒子検出システム内の粒子を検出させるステップと、
前記アドレスに対応する物理的ロケーションを視覚的に示すステップと、
前記ビデオ捕捉システムによって捕捉される少なくとも1つの画像において、前記物理的ロケーションの前記視覚的指示を識別するステップと、
アドレスを、前記ビデオ捕捉システムによって監視される前記複数のロケーションのロケーションに相関付けるステップと、
を含む、方法。 - 前記アドレスに、
前記視覚的指示が識別された前記少なくとも1つの画像を捕捉したカメラ、
前記視覚的指示が識別された前記少なくとも1つの画像を捕捉したカメラのパンパラメータ、チルトパラメータ、又はズームパラメータのうちの1つ又は複数
のうちの1つ又は複数を相関付けるステップを含む、請求項62に記載の方法。 - 前記相関データを前記ビデオ捕捉システムに提供するステップを含み、それにより、前記アドレスにおいて前記粒子検出システムによって粒子が検出される場合、前記粒子検出システムでのアドレスに対応して画像の選択的な捕捉、記憶、又は表示を可能にする、請求項62又は63に記載の方法。
- 前記アドレスに対応する物理的ロケーションを視覚的に示すステップは、
前記ビデオ捕捉システムによって捕捉される画像において捕捉し識別することができる放射線を投射するステップを含む、請求項62〜64のいずれか1項に記載の方法。 - 前記放射線を投射するステップは、放射線源を検出可能なパターンで選択的にアクティブ化するステップを含む、請求項65に記載の方法。
- 前記粒子検出システムで粒子を検出させるステップは、
前記物理的ロケーション又はその近傍に粒子を放射するステップであって、それにより、前記アドレスにおいて前記粒子検出システムに検出させる放射ステップを含む、請求項62〜66のいずれか1項に記載の方法。 - 前記アドレスにおいて前記粒子検出システムで粒子を検出させるステップ及び前記アドレスに対応する物理的ロケーションを視覚的に示すステップは、同時に実行されて、前記ビデオ捕捉システムによって捕捉される画像と、前記粒子検出システムでの粒子検出イベントとの時間的相関付けを可能にする、請求項62〜67のいずれか1項に記載の方法。
- 請求項57〜61の何れかに記載の装置を使用して実行される、請求項62〜67のいずれか1項に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2012902414A AU2012902414A0 (en) | 2012-06-08 | Multi mode detection | |
| AU2012902414 | 2012-06-08 | ||
| PCT/AU2013/000611 WO2013181714A1 (en) | 2012-06-08 | 2013-06-07 | Multi-mode detection |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017119399A Division JP2017201316A (ja) | 2012-06-08 | 2017-06-19 | マルチモード検出 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015520380A true JP2015520380A (ja) | 2015-07-16 |
Family
ID=49711216
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015515355A Pending JP2015520380A (ja) | 2012-06-08 | 2013-06-07 | マルチモード検出 |
| JP2017119399A Pending JP2017201316A (ja) | 2012-06-08 | 2017-06-19 | マルチモード検出 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017119399A Pending JP2017201316A (ja) | 2012-06-08 | 2017-06-19 | マルチモード検出 |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US20150213697A1 (ja) |
| EP (1) | EP2859540A4 (ja) |
| JP (2) | JP2015520380A (ja) |
| KR (1) | KR20150027078A (ja) |
| CN (2) | CN106169215A (ja) |
| AU (1) | AU2013271365B2 (ja) |
| CA (1) | CA2875258A1 (ja) |
| HK (1) | HK1203242A1 (ja) |
| IN (1) | IN2014MN02426A (ja) |
| MY (1) | MY169183A (ja) |
| TW (1) | TWI631534B (ja) |
| WO (1) | WO2013181714A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11295594B2 (en) | 2017-06-09 | 2022-04-05 | Carrier Corporation | Chamberless smoke detector with indoor air quality detection and monitoring |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160055399A1 (en) * | 2014-08-21 | 2016-02-25 | Identiflight, Llc | Graphical display for bird or bat detection and identification |
| SG10201407100PA (en) * | 2014-10-30 | 2016-05-30 | Nec Asia Pacific Pte Ltd | System For Monitoring Event Related Data |
| US10067234B2 (en) * | 2015-02-17 | 2018-09-04 | Honeywell International Inc. | Projected beam detector with imaging device |
| US10600057B2 (en) * | 2016-02-10 | 2020-03-24 | Kenexis Consulting Corporation | Evaluating a placement of optical fire detector(s) based on a plume model |
| KR102474729B1 (ko) * | 2016-06-28 | 2022-12-05 | 한화테크윈 주식회사 | 모니터링 장치 |
| JP6485428B2 (ja) * | 2016-10-06 | 2019-03-20 | 住友電気工業株式会社 | 管理システム、管理装置、管理方法および管理プログラム |
| WO2018079400A1 (ja) * | 2016-10-24 | 2018-05-03 | ホーチキ株式会社 | 火災監視システム |
| CN106846705A (zh) * | 2017-03-01 | 2017-06-13 | 上海斐讯数据通信技术有限公司 | 基于云管理的智能烟雾报警方法及其系统 |
| CN107230329B (zh) * | 2017-06-15 | 2020-04-03 | 深圳市泰和安科技有限公司 | 一种火灾探测器的标定方法、装置及设备 |
| CN107527466A (zh) * | 2017-07-31 | 2017-12-29 | 努比亚技术有限公司 | 一种火灾报警方法、终端和计算机可读存储介质 |
| US20190236922A1 (en) * | 2018-01-30 | 2019-08-01 | The Boeing Company | Optical Cabin and Cargo Smoke Detection Using Multiple Spectrum Light |
| CN108877140A (zh) * | 2018-07-11 | 2018-11-23 | 宿州云宏建设安装有限公司 | 一种高速公路隧道安全运营智能监控系统 |
| CN108898782B (zh) * | 2018-07-20 | 2020-12-11 | 湖北烽火平安智能消防科技有限公司 | 用于隧道防火的红外图像温度信息识别的烟雾探测方法及系统 |
| US11137331B2 (en) | 2018-08-21 | 2021-10-05 | Viavi Solutions Inc. | Multispectral sensor based alert condition detector |
| CN109283108A (zh) * | 2018-08-30 | 2019-01-29 | 安徽乐锦记食品有限公司 | 一种面包加工异常报警装置 |
| US10380862B1 (en) * | 2018-09-17 | 2019-08-13 | Massoud M Heidary | Fire protection system with fan shut off, including a camera and a display unit |
| CN110021135B (zh) * | 2019-03-13 | 2022-01-18 | 赛特威尔电子股份有限公司 | 一种明火报警检测方法、装置、烟雾报警器及存储介质 |
| KR102144973B1 (ko) * | 2019-04-19 | 2020-08-14 | 주식회사 온오프시스템 | 모니터링 장치 및 방법 |
| EP4018421A4 (en) * | 2019-08-21 | 2022-11-09 | Nero Endüstri Savunma Sanayi Anonim Sirketi | LOCKING DEVICE FOR FIRE DETECTORS |
| CN111473864B (zh) * | 2020-05-26 | 2021-05-28 | 中国人民解放军国防科技大学 | 基于均匀光源的火焰激发态粒子辐射速率测量方法 |
| US20220148411A1 (en) * | 2020-11-06 | 2022-05-12 | Ford Global Technologies, Llc | Collective anomaly detection systems and methods |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60156197A (ja) * | 1984-01-25 | 1985-08-16 | 富士通株式会社 | 火災監視システム |
| JPH05159179A (ja) * | 1991-04-03 | 1993-06-25 | Hochiki Corp | 二次元走査型火災監視装置 |
| JPH05281104A (ja) * | 1992-03-30 | 1993-10-29 | Mitsubishi Electric Corp | プラント異常点検装置 |
| JP2000067338A (ja) * | 1998-08-21 | 2000-03-03 | Nittan Co Ltd | 異常表示装置 |
| JP2000348272A (ja) * | 1999-06-02 | 2000-12-15 | Mitsubishi Electric Corp | 火炎センサ |
| JP2008022046A (ja) * | 2006-07-10 | 2008-01-31 | Mitsubishi Electric Corp | 遠隔画像監視システム及び画像送信装置 |
| JP2009015411A (ja) * | 2007-07-02 | 2009-01-22 | Hochiki Corp | 防災表示装置及び制御方法 |
| JP2011503581A (ja) * | 2007-11-15 | 2011-01-27 | エックストラリス・テクノロジーズ・リミテッド | 粒子の検出 |
Family Cites Families (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5237308A (en) * | 1991-02-18 | 1993-08-17 | Fujitsu Limited | Supervisory system using visible ray or infrared ray |
| JP3407096B2 (ja) * | 1995-12-25 | 2003-05-19 | 能美防災株式会社 | 火災報知設備 |
| JP3349881B2 (ja) * | 1996-02-28 | 2002-11-25 | 富士通株式会社 | 赤外線火災監視装置 |
| US5831537A (en) * | 1997-10-27 | 1998-11-03 | Slc Technologies, Inc. | Electrical current saving combined smoke and fire detector |
| JP3326482B2 (ja) * | 1997-12-01 | 2002-09-24 | 株式会社日立製作所 | 火災監視システム |
| JP2000222667A (ja) * | 1999-01-28 | 2000-08-11 | Matsushita Electric Ind Co Ltd | 非常放送装置 |
| JP2000233029A (ja) * | 1999-02-15 | 2000-08-29 | Hitachi Engineering & Services Co Ltd | 火災避難誘導システムおよびそれに使用する火災煙の検知装置 |
| JP3735798B2 (ja) * | 1999-05-24 | 2006-01-18 | 能美防災株式会社 | 防災表示装置 |
| JP2001023055A (ja) * | 1999-07-08 | 2001-01-26 | Mitsubishi Electric Corp | 火炎検出装置および火炎検出方法 |
| JP4410876B2 (ja) * | 1999-07-16 | 2010-02-03 | 日本ドライケミカル株式会社 | 火災の火点位置検出装置 |
| US6529137B1 (en) * | 1999-08-31 | 2003-03-04 | Compass Technologies, Inc. | Method and apparatus for displaying alarm information |
| AU3201101A (en) * | 2000-02-07 | 2001-08-14 | Intelligent Security Limited | Smoke and flame detection |
| ES2243699T3 (es) * | 2001-02-26 | 2005-12-01 | Fastcom Technology S.A. | Procedimiento y dispositivo de deteccion de fuegos basados en el analisis de imagenes. |
| CN2492847Y (zh) * | 2001-08-22 | 2002-05-22 | 浙江南望图像信息产业有限公司 | 具有图像监视功能的烟雾探测器 |
| JP2003067855A (ja) * | 2001-08-27 | 2003-03-07 | Nittan Co Ltd | 防災受信機 |
| JP4066171B2 (ja) * | 2003-03-28 | 2008-03-26 | 能美防災株式会社 | 火災検出装置及び防災システム |
| US7154400B2 (en) * | 2003-06-27 | 2006-12-26 | The United States Of America As Represented By The Secretary Of The Navy | Fire detection method |
| US20050275549A1 (en) * | 2004-06-14 | 2005-12-15 | Barclay Deborah L | Network support for emergency smoke detector/motion detector |
| JP2006004241A (ja) * | 2004-06-18 | 2006-01-05 | Nohmi Bosai Ltd | 火災表示装置 |
| WO2006007859A2 (en) * | 2004-07-18 | 2006-01-26 | Elshaer Ahmed Abd Elhamied Moh | Automatic fire alarm and extinguishing device |
| US7248156B2 (en) * | 2004-11-04 | 2007-07-24 | Mti Industries, Inc. | Combination airborne substance detector |
| EP2595130B1 (en) * | 2004-11-12 | 2016-11-02 | Xtralis Technologies Ltd | Particle detector, system and method |
| US7495573B2 (en) * | 2005-02-18 | 2009-02-24 | Honeywell International Inc. | Camera vision fire detector and system |
| US8416297B2 (en) * | 2007-01-16 | 2013-04-09 | Utc Fire & Security Corporation | System and method for video detection of smoke and flame |
| CN101680832A (zh) * | 2007-03-09 | 2010-03-24 | 爱克斯崔里斯科技有限公司 | 颗粒探测的方法和系统 |
| US7609856B2 (en) * | 2007-11-13 | 2009-10-27 | Huper Laboratories Co., Ltd. | Smoke detection method based on video processing |
| ATE507544T1 (de) * | 2008-02-19 | 2011-05-15 | Siemens Ag | Rauchdetektion mittels zweier spektral unterschiedlicher streulichtmessungen |
| JP2009237991A (ja) * | 2008-03-27 | 2009-10-15 | Aiphone Co Ltd | インターホンシステム |
| DE102008001391B4 (de) * | 2008-04-25 | 2017-06-01 | Robert Bosch Gmbh | Brandmeldervorrichtung sowie Verfahren zur Branddetektion |
| CN101609589A (zh) * | 2008-06-17 | 2009-12-23 | 侯荣琴 | 多频图像火灾探测系统 |
| US7786877B2 (en) * | 2008-06-20 | 2010-08-31 | Billy Hou | Multi-wavelength video image fire detecting system |
| CN101620763A (zh) * | 2009-08-14 | 2010-01-06 | 清华大学 | 一种交互式无线火灾报警系统 |
| CN102148692B (zh) * | 2010-02-09 | 2015-02-18 | 新奥特(北京)视频技术有限公司 | 一种告警信息的二次过滤监控方法和系统 |
| CN201955862U (zh) * | 2011-02-22 | 2011-08-31 | 黄剑锋 | 一种智能可视探测火灾信息的火灾自动报警系统 |
| US8976244B2 (en) * | 2011-09-02 | 2015-03-10 | Verizon Patent And Licensing Inc. | Personal mobile surveillance systems and methods |
-
2013
- 2013-06-07 AU AU2013271365A patent/AU2013271365B2/en not_active Ceased
- 2013-06-07 JP JP2015515355A patent/JP2015520380A/ja active Pending
- 2013-06-07 US US14/405,719 patent/US20150213697A1/en not_active Abandoned
- 2013-06-07 MY MYPI2014703555A patent/MY169183A/en unknown
- 2013-06-07 WO PCT/AU2013/000611 patent/WO2013181714A1/en active Application Filing
- 2013-06-07 CN CN201610680100.2A patent/CN106169215A/zh active Pending
- 2013-06-07 EP EP13800532.7A patent/EP2859540A4/en not_active Withdrawn
- 2013-06-07 IN IN2426MUN2014 patent/IN2014MN02426A/en unknown
- 2013-06-07 CA CA2875258A patent/CA2875258A1/en not_active Abandoned
- 2013-06-07 CN CN201380029915.9A patent/CN104350531B/zh active Active
- 2013-06-07 KR KR1020147034278A patent/KR20150027078A/ko not_active Application Discontinuation
- 2013-06-10 TW TW102120547A patent/TWI631534B/zh not_active IP Right Cessation
-
2015
- 2015-04-17 HK HK15103766.9A patent/HK1203242A1/xx unknown
-
2017
- 2017-06-19 JP JP2017119399A patent/JP2017201316A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60156197A (ja) * | 1984-01-25 | 1985-08-16 | 富士通株式会社 | 火災監視システム |
| JPH05159179A (ja) * | 1991-04-03 | 1993-06-25 | Hochiki Corp | 二次元走査型火災監視装置 |
| JPH05281104A (ja) * | 1992-03-30 | 1993-10-29 | Mitsubishi Electric Corp | プラント異常点検装置 |
| JP2000067338A (ja) * | 1998-08-21 | 2000-03-03 | Nittan Co Ltd | 異常表示装置 |
| JP2000348272A (ja) * | 1999-06-02 | 2000-12-15 | Mitsubishi Electric Corp | 火炎センサ |
| JP2008022046A (ja) * | 2006-07-10 | 2008-01-31 | Mitsubishi Electric Corp | 遠隔画像監視システム及び画像送信装置 |
| JP2009015411A (ja) * | 2007-07-02 | 2009-01-22 | Hochiki Corp | 防災表示装置及び制御方法 |
| JP2011503581A (ja) * | 2007-11-15 | 2011-01-27 | エックストラリス・テクノロジーズ・リミテッド | 粒子の検出 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11295594B2 (en) | 2017-06-09 | 2022-04-05 | Carrier Corporation | Chamberless smoke detector with indoor air quality detection and monitoring |
| US11605278B2 (en) | 2017-06-09 | 2023-03-14 | Carrier Corporation | Chamberless smoke detector with indoor air quality detection and monitoring |
Also Published As
| Publication number | Publication date |
|---|---|
| US20150213697A1 (en) | 2015-07-30 |
| AU2013271365B2 (en) | 2017-02-02 |
| WO2013181714A1 (en) | 2013-12-12 |
| KR20150027078A (ko) | 2015-03-11 |
| TWI631534B (zh) | 2018-08-01 |
| CA2875258A1 (en) | 2013-12-12 |
| EP2859540A1 (en) | 2015-04-15 |
| IN2014MN02426A (ja) | 2015-08-14 |
| CN104350531B (zh) | 2019-03-05 |
| HK1203242A1 (en) | 2015-10-23 |
| MY169183A (en) | 2019-02-25 |
| JP2017201316A (ja) | 2017-11-09 |
| AU2013271365A1 (en) | 2015-01-22 |
| CN104350531A (zh) | 2015-02-11 |
| CN106169215A (zh) | 2016-11-30 |
| TW201413660A (zh) | 2014-04-01 |
| EP2859540A4 (en) | 2016-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017201316A (ja) | マルチモード検出 | |
| US10297129B2 (en) | Fire/security service system with augmented reality | |
| TWI609175B (zh) | 用於決定煙霧進入一煙霧偵測系統中的至少一進入點的方法及裝置,及煙霧偵測器 | |
| EP3792890A1 (en) | Self-testing fire sensing device | |
| US11516436B2 (en) | Method and system for object location notification in a fire alarm system | |
| US9679468B2 (en) | Device and apparatus for self-testing smoke detector baffle system | |
| KR101775463B1 (ko) | 건물 내에 설치되는 자동화재 탐지설비용 화재 감지기 및 이를 포함하는 통합제어시스템 | |
| KR102126281B1 (ko) | 사물인터넷 기반 스마트 화재감지기 및 이를 이용한 화재감지시스템 | |
| KR101993660B1 (ko) | 화재감지 및 화재상황 모니터링 시스템 | |
| TW201530112A (zh) | 粒子偵測之可定址性技術 | |
| CN106448023A (zh) | 一种具有存储功能的火灾烟雾报警器 | |
| US20110130957A1 (en) | Systems and methods for better alarm management | |
| EP3084737A1 (en) | System and method for monitoring and suppressing fire | |
| US10769921B2 (en) | Smoke detector | |
| KR20200007185A (ko) | 불꽃, 연기 및 영상 기반의 조기 화재감지 시스템, 서버 및 방법 | |
| KR101391302B1 (ko) | 주소형 자동화재 탐지설비 | |
| CN111091696B (zh) | 紧急情况通知系统 | |
| KR101447528B1 (ko) | Cctv를 이용한 화재 경보 제어 장치 및 시스템 | |
| EP4270344A1 (en) | Self-testing fire sensing device for confirming a fire | |
| KR102585768B1 (ko) | 열화상 카메라를 이용한 화재 예방 시스템 및 방법 | |
| JP2018136977A (ja) | 火災検知システム及び火災検知方法 | |
| KR101682405B1 (ko) | 3차원 스캐닝을 이용한 캐넌 관제시스템 | |
| JP2000233029A (ja) | 火災避難誘導システムおよびそれに使用する火災煙の検知装置 | |
| KR20240059015A (ko) | 아이피 카메라 융합 스마트 불꽃감지기를 이용한 화재감지 및 대피시스템 | |
| JP2012098886A (ja) | 自動監視システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160304 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161227 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20170316 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20170519 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170605 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20170605 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20171003 |