JP2014046857A - 電動倍力装置 - Google Patents
電動倍力装置 Download PDFInfo
- Publication number
- JP2014046857A JP2014046857A JP2012192327A JP2012192327A JP2014046857A JP 2014046857 A JP2014046857 A JP 2014046857A JP 2012192327 A JP2012192327 A JP 2012192327A JP 2012192327 A JP2012192327 A JP 2012192327A JP 2014046857 A JP2014046857 A JP 2014046857A
- Authority
- JP
- Japan
- Prior art keywords
- piston
- input rod
- linear motion
- sub
- brake pedal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Braking Systems And Boosters (AREA)
Abstract
【課題】電動倍力装置において、電気系統の失陥等により、電動モータが作動不能になった場合におけるブレーキペダルの操作力を軽減する。
【解決手段】ブレーキペダル20の操作に応じて電動モータ22を制御して、ボールネジ機構24を介してプライマリ及びサブピストン7、9を推進してマスタシリンダ2でブレーキ液圧を発生する。ボールネジ機構24の直動部材26の前進により、サブピストン9と入力ロッド21との間に隙間を形成し、ブレーキペダル20の操作に対してシミュレータバネ36で反力を付与する。失陥時には、入力ロッド21でサブピストン9を直接推進してブレーキ液圧を発生する。このとき、係脱機構40のスリーブ43が直動部材26に当接して入力ロッド21と可動バネ受35との係合を解除するので、シミュレータバネ36の反力が作用せず、ブレーキペダル20の操作力を軽減することができる。
【選択図】図1
【解決手段】ブレーキペダル20の操作に応じて電動モータ22を制御して、ボールネジ機構24を介してプライマリ及びサブピストン7、9を推進してマスタシリンダ2でブレーキ液圧を発生する。ボールネジ機構24の直動部材26の前進により、サブピストン9と入力ロッド21との間に隙間を形成し、ブレーキペダル20の操作に対してシミュレータバネ36で反力を付与する。失陥時には、入力ロッド21でサブピストン9を直接推進してブレーキ液圧を発生する。このとき、係脱機構40のスリーブ43が直動部材26に当接して入力ロッド21と可動バネ受35との係合を解除するので、シミュレータバネ36の反力が作用せず、ブレーキペダル20の操作力を軽減することができる。
【選択図】図1
Description
本発明は、自動車等の車両のブレーキ装置に組込まれる倍力装置において、倍力源として電動モータを用いた電動倍力装置に関するものである。
電動倍力装置として、例えば特許文献1に記載されたものが公知である。この電動倍力装置は、ブレーキペダルに連結された入力ロッドと、マスタシリンダのピストンを押圧する押圧部材と、回転−直動変換機構を介して押圧部材を駆動する電動モータと、入力ロッドに一定の反力を付与するストロークシミュレータと、入力ロッドの移動に応じて電動モータの作動を制御するコントローラとを備えている。これにより、ブレーキペダルの操作量に応じて、コントローラによって電動モータの作動を制御して押圧部材によってマスタシリンダのピストンを推進してブレーキ液圧を発生させて所望の制動力を得る。
そして、ブレーキペダルの操作量に対して、コントローラにより電動モータの出力を適宜調整することにより、入力に対する出力の比率、いわゆる倍力比を変化させることができ、倍力制御、ブレーキアシスト制御、回生協調制御等の種々のブレーキ制御を実行することができる。このとき、回生協調制御等によって電動モータの出力が変動した場合でも、ブレーキペダルの操作量に対して、ストロークシミュレータによって一定の反力を付与しているので運転者に違和感を与えることがない。
また、万一、電気系統等の失陥により、電動モータが作動不能になった場合には、ブレーキペダルに連結された入力ロッドによって押圧部材を直接押圧することで、マスタシリンダのピストンを前進させることができ、制動機能を維持できるようになっている。
しかしながら、上記特許文献1に記載された電動倍力装置では、次のような問題がある。万一、電動モータが作動不能になり、ブレーキペダルに連結された入力ロッドによって押圧部材を直接押圧せざるを得ない場合、電動モータの正常時よりも入力ロッドのストロークを大きくすると共に、大きな操作力を必要とすることになる。この場合にも入力ロッドのストロークに対してストロークシミュレータによる反力がブレーキペダルに作用するため、その分、ブレーキペダルを操作するための必要踏力が大きくなり、運転者への負担が大きくなる。
本発明は、電気系統の失陥等により、電動モータが作動不能になった場合における操作力を軽減し得る電動倍力装置を提供することを目的とする。
上記の課題を解決するために、本発明に係る電動倍力装置は、ハウジングと、該ハウジングに設けられて後端部がブレーキペダルに連結された入力部材と、前記ブレーキペダルの操作に応じて作動する電動モータと、該電動モータの作動により、マスタシリンダのピストンを推進するアシスト機構と、前記ハウジングに対する前記入力部材の移動に対して反力を発生する反力発生機構と、前記入力部材と前記反力発生機構とを係合及び係合を解除する係脱機構とを備え、
前記アシスト機構は、前記入力部材に対して相対移動可能に設けられて前記電動モータの作動により直線運動して前記ピストンを推進する直動部材とを含み、
前記入力部材は、前端部を前記ピストンに当接させて該ピストンを直接推進可能であり、
前記係脱機構は、前記入力ロッドと前記直動部材との所定の相対位置に対して、前記直動部材が前記入力ロッドの前端部側に移動したとき、前記入力ロッドと前記反力機構との係合を維持し、前記直動部材が前記入力ロッドの後端部側に移動したとき、前記入力ロッドと前記反力機構との係合を解除することを特徴とする。
前記アシスト機構は、前記入力部材に対して相対移動可能に設けられて前記電動モータの作動により直線運動して前記ピストンを推進する直動部材とを含み、
前記入力部材は、前端部を前記ピストンに当接させて該ピストンを直接推進可能であり、
前記係脱機構は、前記入力ロッドと前記直動部材との所定の相対位置に対して、前記直動部材が前記入力ロッドの前端部側に移動したとき、前記入力ロッドと前記反力機構との係合を維持し、前記直動部材が前記入力ロッドの後端部側に移動したとき、前記入力ロッドと前記反力機構との係合を解除することを特徴とする。
本発明に係る電動倍力装置によれば、電気系統の失陥等により、電動モータが作動不能になった場合における操作力を軽減することができる。
以下、本発明の実施形態を図面に基づいて詳細に説明する。
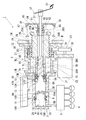
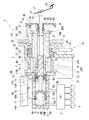
本実施形態に係る電動倍力装置が組込まれた自動車のブレーキシステムを図1に示す。図1に示すように、ブレーキシステム1は、ブレーキ液圧を発生させるマスタシリンダ2と、マスタシリンダ2に一体に結合された電動倍力装置3と、マスタシリンダ2に接続されてブレーキ液圧の供給によって各車輪に制動力を発生させる液圧式のホイールシリンダ4と、マスタシリンダ2と各ホイールシリンダ4との間に介装される液圧制御ユニット5と、電動倍力装置3及び液圧制御ユニット5の作動を制御するコントローラ(図示せず)とを備えている。
本実施形態に係る電動倍力装置が組込まれた自動車のブレーキシステムを図1に示す。図1に示すように、ブレーキシステム1は、ブレーキ液圧を発生させるマスタシリンダ2と、マスタシリンダ2に一体に結合された電動倍力装置3と、マスタシリンダ2に接続されてブレーキ液圧の供給によって各車輪に制動力を発生させる液圧式のホイールシリンダ4と、マスタシリンダ2と各ホイールシリンダ4との間に介装される液圧制御ユニット5と、電動倍力装置3及び液圧制御ユニット5の作動を制御するコントローラ(図示せず)とを備えている。
マスタシリンダ2は、タンデム型であり、有底筒状に形成されたシリンダ本体2Aの内部のシリンダボア6内に、有底円筒状のプライマリピストン7(ピストン)及びセカンダリピストン8が直列に配置されて構成されている。シリンダボア6内において、プライマリピストン7とセカンダリピストン8との間にはプライマリ室6Aが形成され、セカンダリピストン8とシリンダ本体2Aの底部2Bとの間には、セカンダリ室6Bが形成されている。プラマリピストン7の円筒部7Aには、サブピストン9が摺動可能に挿入されている。サブピストン9は、段部9Cを有する段付形状で、大径側の前端部に円筒部9Aが形成され、後部に小径部9Bが形成されている。小径部9Bは、プライマリピストン7の底部を貫通する貫通孔7Bを通って後方に延びている。サブピストン9の段部9Cは、プライマリピストン7の貫通孔7Bが設けられた底部に当接する。
シリンダ本体2Aの側壁の鉛直方向上部には、プライマリ室6A及びセカンダリ室6Bにそれぞれ連通するリザーバポート10、11が設けられている。これらのリザーバポート10、11には、ブレーキ液を貯留するリザーバ12が接続されている。シリンダボア6の内周部には、各リザーバポート10、11の開口部を軸方向において挟むように一対のピストンシール13A、13B及び14A、14Bが装着されている。ピストンシール13A、13B及び14A、14Bは、それぞれシリンダボア6とプライマリ及びセカンダリピストン7、8との間をシールしている。
プライマリ及びセカンダリピストン7、8のそれぞれの円筒部7A、8Aには、その径方向に貫通するピストンポート15、16が形成されている。プライマリピストン7の内周部には、ピストンポート15を挟むように一対のピストンシール17A、17Bが装着されて、サブピストン9との間をシールしている。サブピストン9の円筒部9Aには、その径方向に沿って貫通するピストンポート18が形成されている。プライマリ室6A内には、一端がセカンダリピストン8に当接し、他端がサブピストン9に当接する付勢部材となる圧縮コイルバネである戻しバネ19Aが配置されている。戻しバネ19Aは、そのバネ力により、プライマリピストン7及びサブピストン9を、図1に示す初期位置となるように付勢しており、この初期位置では、サブピストン9の段部9Cがプライマリピストン7の内底面部7Cに当接している。また、セカンダリ室6Bには、一端がシリンダ本体2Aの底部2Bに当接し、他端がセカンダリピストン8に当接する戻しバネ19Bが配置されている。戻しバネ19Bは、そのバネ力により、セカンダリピストン8を、図1に示す初期位置となるように付勢している。
そして、プライマリ及びセカンダリピストン7、8並びにサブピストン9が図1に示す初期位置にあるとき、プライマリピストン7のピストンポート15は一対のピストンシール13A、13Bの間に配置され、また、サブピストン9のピストンポート18は一対のピストンシール17A、17Bの間に配置される。これにより、リザーバ12とプライマリ室6Aとがリザーバポート10及びピストンポート15、18を介して連通されている。また、セカンダリピストン8のピストンポート16は一対のピストンシール14A、14Bの間に配置されている。これにより、リザーバ12とセカンダリ室6Bとがリザーバポート11及びピストンポート16を介して連通される。この状態では、ブレーキパッドの摩耗等に応じてリザーバ12からプライマリ室6A及びセカンダリ室6Bを介して各ホイールシリンダ4に適宜ブレーキ液が補充される。
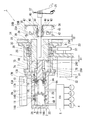
初期位置からプライマリピストン7及びサブピストン9が共に前進して図2に示す待機位置に達するまでの無効ストローク区間では、プライマリ室6Aは、リザーバ12との連通が維持されるので、ブレーキ液圧を発生しない。したがって、セカンダリピストン8が前進せず、プライマリ室6Bは、リザーバ12との連通が維持され、ブレーキ液圧を発生しない。
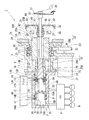
図3に示すように、プライマリピストン7及びサブピストン9が更に前進して、ピストンポート15がピストンシール13Aを越えて移動すると、リザーバポート10とピストンポート15との間がピストンシール13Aによって遮断される。これにより、プライマリ室6Aは、リザーバ12から遮断されて、プライマリ7及びサブピストン9の前進により加圧される。そして、プライマリ室6Aの加圧により、セカンダリピストン8が前進し、ピストンポート16がピストンシール14Aを越えて移動すると、リザーバポート11とピストンポート16との間がピストンシール14Aによって遮断される。これにより、セカンダリ室6Bは、リザーバ12から遮断されてセカンダリピストン8の前進により加圧される。
また、図5及び図6に示すように、プライマリピストン7が初期位置にあり、サブピストン9のみが前進して、サブピストン9のピストンポート18が一方のピストンシール17Aを越えて移動すると、プライマリピストン7及びサブピストン9のピストンポート15、18間がピストンシール17Aによって遮断される。これにより、プライマリ室6Aは、リザーバ12から遮断されて、サブピストン9の前進により加圧される。そして、プライマリ室6Aの加圧により、セカンダリピストン8が前進し、ピストンポート16がピストンシール14Aを越えて移動すると、リザーバポート11とピストンポート16との間がピストンシール14Aによって遮断される。これにより、セカンダリ室6Bは、リザーバ12から遮断されてセカンダリピストン8の前進により加圧される。
プライマリ室6A、セカンダリ室6Bは、それぞれ液圧ポート2C、2Dから同じブレーキ液圧を液圧ユニット5の2系統の液圧回路を介して各車輪のホイールシリンダ4に供給する。これにより、万一、2系統の液圧回路の一方が失陥した場合でも、他方に液圧が供給されるので、制動機能を維持することができる。ホイールシリンダ4は、各車輪に装着されてブレーキ液圧の供給によって制動力を発生する制動装置であり、例えば公知のディスクブレーキ又はドラムブレーキとすることができる。
液圧制御ユニット5は、マスタシリンダ2の2つの液圧ポート2C、2Dに接続される2系統の液圧回路からなり、液圧回路は、液圧源である電動ポンプ、アキュムレータ、液圧センサ、及び、増圧弁、減圧弁等の電磁制御弁を備えている。そして、コントローラにより各車輪のホイールシリンダ4に供給する液圧を減圧する減圧モード、保持する保持モード及び増圧する増圧モードを適宜実行して以下の制御を行う。
(1)各車輪の制動力を制御することにより、制動時に接地荷重等に応じて各車輪に適切に制動力を配分する制動力配分制御。
(2)制動時に各車輪の制動力を自動的に調整して車輪のロックを防止するアンチロックブレーキ制御。
(3)走行中の車輪の横滑りを検知して各車輪に適宜自動的に制動力を付与することにより、アンダーステア及びオーバステアを抑制して車両の挙動を安定させる車両安定性制御。
(4)坂道(特に上り坂)において制動状態を保持して発進を補助する坂道発進補助制御。
(5)発進時等において車輪の空転を防止するトラクション制御。
(6)先行車両に対して一定の車間を保持する車両追従制御、走行車線を保持する車線逸脱回避制御。
(7)障害物との衝突を回避する障害物回避制御。
(1)各車輪の制動力を制御することにより、制動時に接地荷重等に応じて各車輪に適切に制動力を配分する制動力配分制御。
(2)制動時に各車輪の制動力を自動的に調整して車輪のロックを防止するアンチロックブレーキ制御。
(3)走行中の車輪の横滑りを検知して各車輪に適宜自動的に制動力を付与することにより、アンダーステア及びオーバステアを抑制して車両の挙動を安定させる車両安定性制御。
(4)坂道(特に上り坂)において制動状態を保持して発進を補助する坂道発進補助制御。
(5)発進時等において車輪の空転を防止するトラクション制御。
(6)先行車両に対して一定の車間を保持する車両追従制御、走行車線を保持する車線逸脱回避制御。
(7)障害物との衝突を回避する障害物回避制御。
電動倍力装置3は、ブレーキペダル20に連結される入力ロッド21と、電動モータ22と、減速機構を兼ねたベルト伝動機構23と、電動モータ22によってベルト伝動機構23を介して駆動されプライマリピストン7を推進するアシスト機構を構成する回転−直動変換機構であるボールネジ機構24と、これらが組込まれてマスタシリンダ2に結合されるハウジング25とを備えている。
ボールネジ機構24は、プライマリピストン7と同軸上に配置された円筒状の直動部材26と、直動部材26が挿入された円筒状の回転部材27と、これらの間に形成された螺旋状のネジ溝28に装填された複数の転動体であるボール29(鋼球)とを備えている。直動部材26は、内孔26Bを有する筒状に形成され、ハウジング25内で軸方向に沿って移動可能、かつ、軸回りに回転しないように支持されている。回転部材27は、ハウジング25内でベアリング30によって軸回りに回転可能かつ軸方向に移動しないように支持されている。そして、回転部材27を回転させることにより、ネジ溝28内をボール29が転動して直動部材26が軸方向に移動する。
直動部材26は、前端部26Aがプライマリピストン7の後端部7Dに当接し、その内孔26B内にプライマリピストン7の後端部から後方に延出されたサブピストン9の小径円筒部9Bが挿入されている。ハウジング25に結合されたシリンダ本体2Aの後端部と、直動部材26の前面部26Cとの間に戻しバネ31が介装されている。戻しバネ31は、直動部材26をブレーキペダル20側、すなわち、図1に示す初期位置に向って常時付勢している。直動部材26の後端部26Dは、ハウジング25に設けられたストッパ25Bにより軸方向移動の機械的後退端が規定されている。
回転部材27の後端部側の外周部には、プーリ32が取付けられている。このプーリ32と、ハウジング25の外側側面部に固定された電動モータ22の出力軸に取付けられたプーリ33との間にベルト34が巻装されている。これらにより、ベルト伝動機構23が構成され、電動モータ22によって回転部材27を所定の減速比で回転駆動する。なお、ベルト伝動機構23の代りに、歯車伝動機構、チェーン伝動機構等の他の公知の伝動機構を用いることができ、あるいは、伝達機構を介さずに電動モータ22によって回転部材23を直接駆動するようにしてもよい。また、ベルト伝動機構23に、歯車減速機構等の減速機構を組み合わせて設けて減速比を調整するようにしてもよい。更に、ベルト伝動機構23に、歯車減速機構等の減速機構を併設して設け、この減速機構を万一、ベルト34が切断した際のバックアップとして用いてもよい。
電動モータ22は、例えば公知のDCモータ、DCブラシレスモータ、ACモータ等とすることができるが、制御性、静粛性、耐久性等の観点から本実施形態ではDCブラシレスモータを採用している。
入力ロッド21は、前端部が直動部材26の内孔26Bに挿入されてサブピストン9の小径部9Bの後端部に当接し、内孔26Bから後方に延出した後端部にブレーキペダル20が連結されている。入力ロッド21の他端部側には、可動バネ受35が取付けられており、ハウジング25側に固定された固定バネ受25Aと可動バネ受35との間に、反力発生機構として、圧縮コイルバネであるシミュレータバネ36が介装されている。入力ロッド21及び可動バネ受35には、これらの間を係合して軸方向に固定し、また、係合を解除して軸方向に移動可能にする系脱機構40が設けられている。電動倍力装置3は、車体前部のエンジンルーム内に配置され、ハウジング25の後端部がエンジンルームと車室との隔壁であるダッシュパネルDに固定され、直動部材26の後端部と共に入力ロッド21がダッシュパネルDを貫通して車室内に延ばされてブレーキペダル20に連結されている。
係脱機構40は、可動バネ受35に一体的に形成されて入力ロッド21が摺動可能に挿入される円筒状の案内部41と、入力ロッド21の外周に形成された係合溝42と、可動バネ受35の案内部41に摺動可能に外嵌される略円筒状のスリーブ43と、入力ロッド21とスリーブ43との間に装填された複数の係合ボール44(鋼球)とを含んでいる。
案内部41の側壁には、複数の係合ボール44がそれぞれ装填されるボール孔45が円周方向に沿って複数配置されている。スリーブ43は、軸方向の中間部が拡径されて内周に係合溝46が形成されている。スリーブ43は、直動部材26の内孔26Bよりも大径で、前端部が直動部材26の後端部に当接するようになっている。係合ボール44の直径は、案内部41の側壁の厚さよりも大きく、案内部41の側壁の厚さと入力ロッド21の係合溝42の深さとの和にほぼ等しい。また、スリーブ43の係合溝46の深さは、入力軸21の係合溝42の深さとほぼ等しい。したがって、係合ボール44の直径は、案内部41の側壁の厚さとスリーブ43の係合溝42の深さとの和にほぼ等しい。
スリーブ43は、入力ロッド21に取付けられたストッパ47に当接して直動部材26側への移動が規制され、可動バネ受35の端面との間に介装された圧縮コイルバネであるバネ48によってストッパ47側に向って付勢されている。そして、図1に示す初期位置において、スリーブ43は、バネ48のバネ力によりストッパ47に当接し、かつ、前端部が直動部材26の後端部に当接している。スリーブ43がストッパ47に当接した状態では、案内部41のボール孔45内に装填された係合ボール44は、入力ロッド21の係合溝42に係合した状態でスリーブ43の内周面によって径方向外側への移動が阻止され、入力ロッド21と案内部41(すなわち可動バネ受35)とを軸方向に固定する。この状態では、可動バネ受35は、入力ロッド21と共に移動してシミュレータバネ36を伸縮させる。
上述の係脱機構40のスリーブ43が直動部材26に当接した位置から、入力部材21が直動部材26に対して前進し、スリーブ43が直動部材26の後端部に押付けられてバネ48のバネ力に抗してブレーキペダル20側に移動し、スリーブ43の係合溝46が案内部41のボール孔45に整合すると(図5参照)、係合ボール44は、スリーブ43の係合溝46に係合して径方向外側に移動する。これにより、係合ボール44は、入力ロッド21の係合溝42との係合を解除して、入力ロッド21と案内部41(すなわち可動バネ受35)とを軸方向に移動可能にする(図6参照)。この状態では、入力ロッド21が移動しても可動バネ受35は、移動せずシミュレータバネ36を伸縮させない。
したがって、直動部材26と係脱機構40のスリーブ43とが当接する入力ロッド21と直動部材26との相対位置を所定の相対位置として、この所定の相対位置に対して、直動部材26が入力ロッド21の前端部側に移動したとき、係脱機構40は、スリーブ43がストッパ47に当接して入力ロッド21と可動バネ受35とを係合して軸方向に固定する。そして、前記所定の相対位置に対して、直動部材26が入力ロッド21のブレーキペダル20が連結された後端部側に移動したとき、係脱機構は、スリーブ43が直動部材26に押圧されてブレーキペダル20側に移動して、入力ロッド21と可動バネ受35との係合を解除して、これらを軸方向に相対移動可能にする。
電動倍力装置3には、ブレーキペダル20の操作量を検出するストロークセンサ37、電動モータ22の回転角(モータ回転位置)を検出する回転位置センサ(図示せず)、電動モータ22に流れる電流(モータ電流)を計測する電流センサ(図示せず)及びマスタシリンダ2のブレーキ液圧を検出する液圧センサを含む各種センサが接続される。コントローラは、上述の各種センサの検出に基づき、車両電源からの電力供給を受けて電動モータ22を制御する。ストロークセンサ37は、ブレーキペダル20や入力ロッド21の直動、若しくは、ブレーキペダル20の回動を検出するセンサとすることができ、ポテンショメータやエンコーダ等のセンサを用いることができる。モータ回転位置を検出する回転位置センサは、レゾルバ、エンコーダ等を使用することができる。また、液圧センサは、必ずしも液圧制御ユニット5に設けられている必要はなく、マスタシリンダ2のプライマリ室6A、セカンダリ室6Bのいずれか一方に設けるようにしてもよい。
以上のように構成した本実施形態の作用について次に説明する。
(通常制動時)
初期状態においては、ブレーキシステム1の各部は、図1に示す初期位置にあり、サブピストン9と入力ロッド21とが当接し、また、直動部材26の後端部と係脱機構40のスリーブ43の前端部とが当接している。
(通常制動時)
初期状態においては、ブレーキシステム1の各部は、図1に示す初期位置にあり、サブピストン9と入力ロッド21とが当接し、また、直動部材26の後端部と係脱機構40のスリーブ43の前端部とが当接している。
コントローラは、車両のイグニッションオンやイグニッションオフ状態でのブレーキペダル20の操作、車両CANからの起動信号等により、システムオン状態となり、上記センサ類の原点調整等を行った後、電動モータ22を駆動して直動部材26を図2に示す待機位置まで前進させ、プライマリピストン7及びサブピストン9を前進させて、入力ロッド21からサブピストン9を離間させて、これらの間に所定の隙間S1を設ける。このとき、直動部材26の前進により、直動部材26と係脱機構40のスリーブ43との間にも隙間S2が形成される。この状態では、プライマリピストン7のピストンポート15は、リザーバポート10に連通しており、プライマリ室6A及びセカンダリ室6Bでブレーキ液圧は発生しない。
そして、車両電源、コントローラ、電動モータ22等が失陥していない通常の制動時には、運転者により、ブレーキペダル20が操作されると、コントローラには、その操作量をストロークセンサ37によって検出し、ブレーキペダル20の操作量に基づき、回転位置センサ、電流センサ及び液圧センサの検出に応じて電動モータ22を制御する。図3に示すように、電動モータ22は、ベルト伝動機構23を介してボールネジ機構24を駆動し、直動部材26を戻しバネ31のバネ力に抗して待機位置から前進させて、プライマリピストン7を推進する。これにより、プライマリ及びセカンダリピストン7、8が前進し、プライマリ室6A及びセカンダリ室6Bをリザーバ12から遮断して加圧し、ブレーキ液圧を発生させ、液圧制御ユニット5を介して各車輪のホイールシリンダ4に供給して制動力を発生させる。
このとき、入力ロッド21の移動に直動部材26が追従するので、入力ロッド21とサブピストン9との間の隙間S1及び直動部材26と係脱機構40のスリーブ43との間の隙間S2が保持される。入力ロッド21とサブピストン9との間の隙間S1により、マスタシリンダ2のブレーキ液圧は、入力ロッド21に伝達されない。また、直動部材26とスリーブ43との間の隙間S2により、係脱機構40のスリーブ43がストッパ47に当接した位置にあり、入力ロッド21と可動バネ受35とが軸方向に固定されているので、入力ロッド21の移動に対してシミュレータバネ36の反力が作用する。したがって、電動モータ22は、いわゆるブレーキバイワイヤ制御されることになり、ブレーキペダル20の操作量に対して、コントローラによりマスタシリンダ2が発生するブレーキ液圧を自由に可変制御して様々なブレーキ特性を得ることができ、倍力比の変更、回生協調制御等のブレーキ制御が可能になる。
(回生制動時)
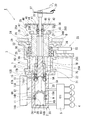
回生協調制御では、制動時に車輪の回転により発電機を駆動して、運動エネルギを電力に変換して回収する回生制動を行ない、コントローラにより電動モータ22を制御して回生制動分だけマスタシリンダ2のブレーキ液圧を減圧することにより、ブレーキペダル20の操作量に応じた所望の制動力を得る。この場合、図4に示すように、ブレーキペダル20の操作量すなわち入力ロッド21の移動量に対して、電動モータ22による直動部材26の移動量すなわちプライマリピストン7及びサブピストン9の移動量が小さくなるので、入力ロッド21とサブピストン9との間の隙間S1及び直動部材26と係脱機構40のスリーブ43との間の隙間S2が図2に示す通常の制動時に比して小さくなる。
回生協調制御では、制動時に車輪の回転により発電機を駆動して、運動エネルギを電力に変換して回収する回生制動を行ない、コントローラにより電動モータ22を制御して回生制動分だけマスタシリンダ2のブレーキ液圧を減圧することにより、ブレーキペダル20の操作量に応じた所望の制動力を得る。この場合、図4に示すように、ブレーキペダル20の操作量すなわち入力ロッド21の移動量に対して、電動モータ22による直動部材26の移動量すなわちプライマリピストン7及びサブピストン9の移動量が小さくなるので、入力ロッド21とサブピストン9との間の隙間S1及び直動部材26と係脱機構40のスリーブ43との間の隙間S2が図2に示す通常の制動時に比して小さくなる。
(失陥時)
万一、電動モータ22、コントローラあるいはボールネジ機構16の故障等により、電動モータ22による制御が不可能になった場合、運転者がブレーキペダル20を操作しても、電動モータ22が作動せず、ボールネジ機構24の直動部材26は、前進せず、図1に示す初期位置に留まることになる。そして、ブレーキペダル20が踏込まれて入力ロッド21が前進すると、図5に示すように、直動部材26に当接したプライマリピストン7は前進せず、入力ロッド21に当接したサブピストン9のみが前進して、ピストンポート15、18間をピストンシール17Aで遮断して、プライマリ室6Aを加圧する。また、プライマリ室6Aの加圧により、セカンダリピストン8が前進し、リザーバポート11とピストンポート16との間を一対のピストンシール13A、13Bによって遮断してセカンダリ室6Bを加圧する。このようにして、ブレーキペダル20の操作力により、サブピストン9でプライマリ室6A及びセカンダリ室6Bを直接加圧して、ブレーキ液圧を発生させ、各車輪のホイールシリンダ4に供給することがでる。これにより、電気系統等が故障した失陥時でも制動機能を維持することができる。
万一、電動モータ22、コントローラあるいはボールネジ機構16の故障等により、電動モータ22による制御が不可能になった場合、運転者がブレーキペダル20を操作しても、電動モータ22が作動せず、ボールネジ機構24の直動部材26は、前進せず、図1に示す初期位置に留まることになる。そして、ブレーキペダル20が踏込まれて入力ロッド21が前進すると、図5に示すように、直動部材26に当接したプライマリピストン7は前進せず、入力ロッド21に当接したサブピストン9のみが前進して、ピストンポート15、18間をピストンシール17Aで遮断して、プライマリ室6Aを加圧する。また、プライマリ室6Aの加圧により、セカンダリピストン8が前進し、リザーバポート11とピストンポート16との間を一対のピストンシール13A、13Bによって遮断してセカンダリ室6Bを加圧する。このようにして、ブレーキペダル20の操作力により、サブピストン9でプライマリ室6A及びセカンダリ室6Bを直接加圧して、ブレーキ液圧を発生させ、各車輪のホイールシリンダ4に供給することがでる。これにより、電気系統等が故障した失陥時でも制動機能を維持することができる。
このとき、係脱機構40のスリーブ43は、初期位置に留まった直動部材26に当接してブレーキペダル20側に移動し、入力ロッド21と可動バネ受35との係合を解除する。これにより、入力ロッド21の移動に対して、可動バネ受35が移動せず、シミュレータバネ36のバネ力が作用しない。これに加えて、受圧面積の小さいサブピストン9によってプライマリ室6Aを加圧するので、ブレーキペダル20の操作力を軽減することができ、失陥時における運転者の負担を軽減することができる。
次に、上記実施形態の変形例について、図7及び図8を参照して説明する。
なお、以下の説明において、上記実施形態に対して、同様の部分には同じ参照符号を用いて異なる部分についてのみ詳細に説明する。
なお、以下の説明において、上記実施形態に対して、同様の部分には同じ参照符号を用いて異なる部分についてのみ詳細に説明する。
図7に示すように、本変形例では、初期位置において、係脱機構40のスリーブが直動部材26に押圧されて、ブレーキペダル20側に移動し、入力ロッド21と可動バネ受35との係合を解除して、これらが互いに軸方向に移動可能となっている。
そして、図8に示すように、電動モータ22を駆動して直動部材26を待機位置まで前進させ、プライマリピストン7及びサブピストン9を前進させ、入力ロッド21からサブピストン9を離間させて、これらの間に所定の隙間S1を設ける。この状態では、図2に示す状態と同様、プライマリピストン7のピストンポート15は、リザーバポート10に連通しており、プライマリ室6A及びセカンダリ室6Bでブレーキ液圧は発生しない。このとき、直動部材26が前進して、係脱機構40のスリーブ43から離間し、スリーブ43は、バネ48のバネ力によって移動し、ストッパ47に当接して入力ロッド21と可動バネ受35とを係合し、これらを互いに軸方向に固定する。そして、直動部材26とスリーブ43との間に所定の隙間S2が形成される。
これにより、上記実施形態と同様、通常の制動時において、ブレーキペダル20の操作に対して、シミュレータバネ36によって反力を作用させ、コントローラにより電動モータ22を制御してマスタシリンダ2で所望のブレーキ液圧を発生させて、様々なブレーキ特性を得ることができる。
また、失陥時には、図7に示す初期位置において、係脱機構40のスリーブ43が直動部材26に押圧されてブレーキペダル20側に移動し、入力ロッド21と可動バネ受35との係合が解除されて、これらが互いに軸方向に移動可能となっているので、ブレーキペダル20を踏込むと、当初から入力ロッド21のみが移動して可動バネ受35が移動しな。これにより、ブレーキペダル20の踏込み当初からシミュレータバネ36の反力が作用しないので、上記実施形態よりも更に運転者の負担を軽減することができる。
なお、上記実施形態及びその変形例では、失陥時に入力ロッド21により、サブピストン9を推進する構造となっているが、プライマリピストン7とサブピストン9とを一体化して1つのピストンとし、これを入力ロッド21により推進するようにしてもよい。この場合、ピストンの受圧面積が大きくなるので、運転者の負担も大きくなる。
2…マスタシリンダ、3…電動倍力装置、7…プライマリピストン(ピストン)、9…サブピストン(ピストン)、20…ブレーキペダル、21…入力部材、22…電動モータ、24…ボールネジ機構(アシスト機構)、25…ハウジング、26…直動部材、36…シミュレータバネ(反力発生機構)、40…係脱機構
Claims (2)
- ハウジングと、該ハウジングに設けられて後端部がブレーキペダルに連結された入力部材と、前記ブレーキペダルの操作に応じて作動する電動モータと、該電動モータの作動により、マスタシリンダのピストンを推進するアシスト機構と、前記ハウジングに対する前記入力部材の移動に対して反力を発生する反力発生機構と、前記入力部材と前記反力発生機構とを係合及び係合を解除する係脱機構とを備え、
前記アシスト機構は、前記入力部材に対して相対移動可能に設けられて前記電動モータの作動により直線運動して前記ピストンを推進する直動部材を含み、
前記入力部材は、前端部を前記ピストンに当接させて該ピストンを直接推進可能であり、
前記係脱機構は、前記入力ロッドと前記直動部材との所定の相対位置に対して、前記直動部材が前記入力ロッドの前端部側に移動したとき、前記入力ロッドと前記反力機構との係合を維持し、前記直動部材が前記入力ロッドの後端部側に移動したとき、前記入力ロッドと前記反力機構との係合を解除することを特徴とする電動倍力装置。 - 前記ピストンは、該ピストンに対して軸方向に移動可能なサブピストンを有し、前記アシスト機構は、前記ピストン及びサブピストンを推進し、前記入力部材は、前記サブピストンのみに当接して該サブピストンを直接推進することを特徴とする請求項1に記載の電動倍力装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012192327A JP2014046857A (ja) | 2012-08-31 | 2012-08-31 | 電動倍力装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012192327A JP2014046857A (ja) | 2012-08-31 | 2012-08-31 | 電動倍力装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014046857A true JP2014046857A (ja) | 2014-03-17 |
Family
ID=50606942
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012192327A Pending JP2014046857A (ja) | 2012-08-31 | 2012-08-31 | 電動倍力装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014046857A (ja) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015205685A (ja) * | 2014-04-17 | 2015-11-19 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 電気ブレーキ倍力装置 |
| CN106427967A (zh) * | 2016-11-25 | 2017-02-22 | 清华大学 | 一种全机械解耦汽车用线控制动系统 |
| CN106627549A (zh) * | 2016-11-30 | 2017-05-10 | 浙江三星机电股份有限公司 | 电动助力制动装置 |
| CN109177946A (zh) * | 2018-11-02 | 2019-01-11 | 吉林大学 | 一种无反应盘的完全解耦式集成电子液压制动系统 |
| CN109204271A (zh) * | 2017-06-30 | 2019-01-15 | 比亚迪股份有限公司 | 制动踏板模拟器、汽车制动系统和车辆 |
| CN109204266A (zh) * | 2017-06-30 | 2019-01-15 | 比亚迪股份有限公司 | 制动踏板模拟器、汽车制动系统和车辆 |
| CN109204265A (zh) * | 2017-06-30 | 2019-01-15 | 比亚迪股份有限公司 | 制动踏板模拟器、汽车制动系统和车辆 |
| CN109204272A (zh) * | 2017-06-30 | 2019-01-15 | 比亚迪股份有限公司 | 制动踏板模拟器、汽车制动系统和车辆 |
| CN110027535A (zh) * | 2018-01-12 | 2019-07-19 | 比亚迪股份有限公司 | 用于车辆的踏板感模拟器和具有其的车辆 |
| CN110920585A (zh) * | 2019-12-30 | 2020-03-27 | 陕西国力信息技术有限公司 | 一种制动力放大器 |
| JP2021508641A (ja) * | 2018-01-11 | 2021-03-11 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | ブレーキ倍力装置、およびブレーキ倍力装置のための製造方法 |
| CN112918451A (zh) * | 2021-04-08 | 2021-06-08 | 合肥工业大学 | 一种电机控制液压制动系统 |
| CN113071467A (zh) * | 2021-05-12 | 2021-07-06 | 浙江大学台州研究院 | 一种解耦型电动助力制动装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005329872A (ja) * | 2004-05-21 | 2005-12-02 | Advics:Kk | 車両用ブレーキ液圧発生装置 |
| JP2007283820A (ja) * | 2006-04-13 | 2007-11-01 | Honda Motor Co Ltd | Bbw式ブレーキ装置 |
| JP2008030599A (ja) * | 2006-07-28 | 2008-02-14 | Hitachi Ltd | 電動倍力装置 |
| JP2010184699A (ja) * | 2009-01-13 | 2010-08-26 | Advics Co Ltd | ブレーキ装置 |
| JP2012076572A (ja) * | 2010-09-30 | 2012-04-19 | Hitachi Automotive Systems Ltd | ブレーキ制御装置 |
-
2012
- 2012-08-31 JP JP2012192327A patent/JP2014046857A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005329872A (ja) * | 2004-05-21 | 2005-12-02 | Advics:Kk | 車両用ブレーキ液圧発生装置 |
| JP2007283820A (ja) * | 2006-04-13 | 2007-11-01 | Honda Motor Co Ltd | Bbw式ブレーキ装置 |
| JP2008030599A (ja) * | 2006-07-28 | 2008-02-14 | Hitachi Ltd | 電動倍力装置 |
| JP2010184699A (ja) * | 2009-01-13 | 2010-08-26 | Advics Co Ltd | ブレーキ装置 |
| JP2012076572A (ja) * | 2010-09-30 | 2012-04-19 | Hitachi Automotive Systems Ltd | ブレーキ制御装置 |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015205685A (ja) * | 2014-04-17 | 2015-11-19 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 電気ブレーキ倍力装置 |
| CN106427967A (zh) * | 2016-11-25 | 2017-02-22 | 清华大学 | 一种全机械解耦汽车用线控制动系统 |
| CN106427967B (zh) * | 2016-11-25 | 2023-07-14 | 清华大学 | 一种全机械解耦汽车用线控制动系统 |
| CN106627549A (zh) * | 2016-11-30 | 2017-05-10 | 浙江三星机电股份有限公司 | 电动助力制动装置 |
| CN109204271A (zh) * | 2017-06-30 | 2019-01-15 | 比亚迪股份有限公司 | 制动踏板模拟器、汽车制动系统和车辆 |
| CN109204266A (zh) * | 2017-06-30 | 2019-01-15 | 比亚迪股份有限公司 | 制动踏板模拟器、汽车制动系统和车辆 |
| CN109204265A (zh) * | 2017-06-30 | 2019-01-15 | 比亚迪股份有限公司 | 制动踏板模拟器、汽车制动系统和车辆 |
| CN109204272A (zh) * | 2017-06-30 | 2019-01-15 | 比亚迪股份有限公司 | 制动踏板模拟器、汽车制动系统和车辆 |
| JP7013584B2 (ja) | 2018-01-11 | 2022-01-31 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | ブレーキ倍力装置、およびブレーキ倍力装置のための製造方法 |
| US11541850B2 (en) | 2018-01-11 | 2023-01-03 | Robert Bosch Gmbh | Brake booster and production method for a brake booster |
| JP2021508641A (ja) * | 2018-01-11 | 2021-03-11 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | ブレーキ倍力装置、およびブレーキ倍力装置のための製造方法 |
| CN110027535A (zh) * | 2018-01-12 | 2019-07-19 | 比亚迪股份有限公司 | 用于车辆的踏板感模拟器和具有其的车辆 |
| CN109177946B (zh) * | 2018-11-02 | 2019-05-31 | 吉林大学 | 一种无反应盘的完全解耦式集成电子液压制动系统 |
| CN109177946A (zh) * | 2018-11-02 | 2019-01-11 | 吉林大学 | 一种无反应盘的完全解耦式集成电子液压制动系统 |
| CN110920585A (zh) * | 2019-12-30 | 2020-03-27 | 陕西国力信息技术有限公司 | 一种制动力放大器 |
| CN112918451A (zh) * | 2021-04-08 | 2021-06-08 | 合肥工业大学 | 一种电机控制液压制动系统 |
| CN112918451B (zh) * | 2021-04-08 | 2022-03-15 | 合肥工业大学 | 一种电机控制液压制动系统 |
| CN113071467A (zh) * | 2021-05-12 | 2021-07-06 | 浙江大学台州研究院 | 一种解耦型电动助力制动装置 |
| CN113071467B (zh) * | 2021-05-12 | 2024-04-12 | 浙江大学台州研究院 | 一种解耦型电动助力制动装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014046857A (ja) | 電動倍力装置 | |
| JP5721068B2 (ja) | 電動倍力装置 | |
| JP5483042B2 (ja) | ブレーキ制御装置 | |
| JP5704311B2 (ja) | 電動倍力装置及びその自動ブレーキの制御方法 | |
| JP5756275B2 (ja) | 電動倍力装置 | |
| JP5800951B2 (ja) | ブレーキ装置 | |
| US9283943B2 (en) | Brake apparatus | |
| JP2014069666A (ja) | 電動倍力装置 | |
| JP5980417B2 (ja) | 電動倍力装置 | |
| JP2014046853A (ja) | 電動倍力装置 | |
| JP2011131886A (ja) | 電動倍力装置 | |
| JP5872252B2 (ja) | 液圧発生装置 | |
| JP5828688B2 (ja) | ストロークシミュレータおよび電動アクチュエータ | |
| JP5648798B2 (ja) | ブレーキ装置 | |
| JP6004870B2 (ja) | 電動倍力装置 | |
| JP2012116278A (ja) | ブレーキ制御装置 | |
| JP2013010473A (ja) | 電動倍力装置 | |
| JP2011218976A (ja) | ブレーキ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150423 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160224 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160225 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160824 |