JP5648798B2 - ブレーキ装置 - Google Patents
ブレーキ装置 Download PDFInfo
- Publication number
- JP5648798B2 JP5648798B2 JP2010262479A JP2010262479A JP5648798B2 JP 5648798 B2 JP5648798 B2 JP 5648798B2 JP 2010262479 A JP2010262479 A JP 2010262479A JP 2010262479 A JP2010262479 A JP 2010262479A JP 5648798 B2 JP5648798 B2 JP 5648798B2
- Authority
- JP
- Japan
- Prior art keywords
- hydraulic pressure
- brake pedal
- control
- piston
- brake
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Braking Systems And Boosters (AREA)
- Regulating Braking Force (AREA)
Description
図1に示すように、本実施形態に係るブレーキ装置1は、タンデム型のマスタシリンダ2と、ケース4内に組み込まれた倍力機構3とを備えている。
マスタシリンダ2には、リザーバ5が接続されている。マスタシリンダ2は、略有底円筒状のシリンダ本体2Aを含み、その開口部側がケース4の前部にスタッドボルト6A及びナット6Bによって結合されている。ケース4の上部には、制御手段であるコントローラCが取付けられている。ケース4の後部には、平坦な取付座面7が形成され、取付座面7からマスタシリンダ2と同心の円筒状の案内部8が突出している。そして、ブレーキ装置1は、車両のエンジンルーム内に配置され、案内部8をエンジンルームと車室との隔壁Wに貫通させて車室内に延ばし、取付座面7を隔壁Wに当接させて取付座面7に設けられたスタッドボルト9を用いて固定される。
ブレーキペダルBを操作して入力ロッド34を介して入力ピストン32を前進させると、入力ピストン32の変位をストロークセンサ80によって検出し、コントローラCによって入力ピストン32の変位に基づいて電動モータ40の作動を制御し、ボールネジ機構41を介してアシストピストン10を前進させて入力ピストン32の変位に追従させる。これにより、アシスト室16に液圧が発生し、また、この液圧がセカンダリピストン11を介してセカンダリ室17に伝達される。このようにして、マスタシリンダ2で発生したブレーキ液圧は、液圧ポート18、19から液圧供給装置70を介して各車輪のブレーキキャリパ71に供給されて制動力を発生させる。
まず、ステップS1においては、HSA制御(液圧制御)が開始されているかを判定する。HSA制御(液圧制御)は、ブレーキペダルをリリースしても、運転者がブレーキペダルを踏んで停止している際のマスタシリンダ圧(HSA制御液圧指令値)を保持する制御である。
なお、HSA制御により保持するマスタシリンダ圧(HSA制御液圧指令値)を、運転者がブレーキペダルを踏んで停止している際の圧力としたが、予め決められた所定圧力であってもよい。
以下、HSA制御(液圧制御)の一例について説明する。車両の前後加速度を検出する前後Gセンサで検出された前後Gの出力信号と、各車輪に設置された車輪速センサからの出力信号とにより車両が登坂路で停車しているか否かを判定する(例えば、車輪速センサが0にも係わらず前後Gセンサの値が0でない場合は、前後Gセンサが傾斜している。すなわち、登坂路と判定する)。このとき、ブレーキペダルが踏み込まれ、かつ、ギアがDレンジとなっているときに、発進待機状態と判断し、HSA制御(液圧制御)が開始される。ステップS1で、HSA制御(液圧制御)が開始されていると判定した場合は、ステップS3に進み、判定不成立の場合にはステップS100に進み上述した通常のブレーキ制御が行なわれる。
なお、発進待機状態とは、ブレーキペダルを踏み込むことで停車しており、アクセルに踏みかえることで発進可能な状態をいい、例えば、車輪速とブレーキランプスイッチ、ギアの状態で判断してもよい。また、HSA制御は、登坂路において有効であるが平坦路において実行してもよい。さらに、HSA制御の開始は、必ずしも、上記の条件に限らず、例えば、ブレーキペダルBをリリースした時点でスタートさせてもよい。
まず、車輌では、常にストロークセンサ80からのストローク量に基づいた入力ピストン32の位置と、入力ピストン32とアシストピストン10との相対位置制御によって算出されるアシストピストン10の位置とから踏込み液圧指令値を算出する。(通常の走行中は、相対位置制御をおこなっているので、演算のみ行っている)。そして、HSA制御中においては、この液圧を踏込み液圧指令値と図3のステップS104において求められるHSA制御液圧指令値とを比較し、高い方の液圧指令値として、液圧制御を行う。
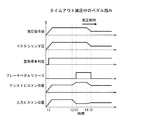
なお、ブレーキペダルBのリリース判定は、ブレーキペダルBを完全に離した状態を判断しても良いが、本実施の形態では、完全に離した状態ではなく、若干踏み込んだ状態でブレーキペダルBのリリース判定を行っている。
この判定結果により、停止状態では、HSA制御が不要となるので、圧力を減圧する処理を行う。
時点(t3)から(t4)では、ブレーキペダルBのリリース判定が成立した時点(t3)の液圧が保持される。その後、時間t4にて車両が停止状態であると判定されるとHSA制御液圧指令値を徐々に小さくする減圧制御が開始される。
これは、HSA制御は、自動パーキングブレーキではなく、あくまでも、ブレーキペダルとアクセルペダルの踏換えの際の車両の動きを抑えるものであるので、このような機能を追加している。必ずしも必要な機能ではない。
Claims (3)
- ブレーキペダルの操作量を検出する操作量検出手段と、
前記ブレーキペダルの操作量に基づいて動作する電動アクチュエータと、
該電動アクチュエータにより作動する倍力機構と、
該倍力機構の作動によって液圧を発生させるマスタシリンダと、
該マスタシリンダ内の液圧を検出する液圧センサと、
車両が停車しているときに前記ブレーキペダルがリリースされた場合に、所定の液圧指令値に基づいて前記マスタシリンダ内の液圧を制御するべく前記電動アクチュエータを制御するヒルスタートアシスト制御を行うコントローラと、
を備えたブレーキ装置であって、
前記コントローラは、ヒルスタートアシスト制御を行っている際で、前記操作量検出手段により前記ブレーキペダルの操作を検出した際、その時点で前記液圧センサによって検出された液圧値であるヒルスタートアシスト制御液圧指令値と、前記ブレーキペダルの操作量に対応した踏込み液圧指令値とを比較して高い値を選択し、前記マスタシリンダ内の液圧が当該選択した値となるように前記電動アクチュエータを制御することを特徴とするブレーキ装置。 - 前記コントローラは、車両が停車しているときに、前記ブレーキペダルがリリースされた場合に、マスタシリンダ内の液圧を所定時間、所定の圧力に保つように制御し、所定時間後減圧する制御を有する請求項1に記載のブレーキ装置。
- 前記コントローラは、車両が停車しているときに、前記ブレーキペダルがリリースされた場合に、マスタシリンダ内の液圧を所定の圧力に保つように制御し、所定の条件により前記マスタシリンダ圧を減圧する制御を有する請求項1に記載のブレーキ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010262479A JP5648798B2 (ja) | 2010-11-25 | 2010-11-25 | ブレーキ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010262479A JP5648798B2 (ja) | 2010-11-25 | 2010-11-25 | ブレーキ装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012111373A JP2012111373A (ja) | 2012-06-14 |
| JP2012111373A5 JP2012111373A5 (ja) | 2013-12-19 |
| JP5648798B2 true JP5648798B2 (ja) | 2015-01-07 |
Family
ID=46496062
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010262479A Active JP5648798B2 (ja) | 2010-11-25 | 2010-11-25 | ブレーキ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5648798B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014008869A (ja) * | 2012-06-29 | 2014-01-20 | Hitachi Automotive Systems Ltd | 倍力装置 |
| JP6084600B2 (ja) * | 2014-12-25 | 2017-02-22 | 本田技研工業株式会社 | 車両用制動装置 |
| KR101766081B1 (ko) | 2015-12-09 | 2017-08-07 | 현대자동차주식회사 | 차량의 경사로 출발 보조 제어 방법 |
-
2010
- 2010-11-25 JP JP2010262479A patent/JP5648798B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012111373A (ja) | 2012-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5831486B2 (ja) | ブレーキシステム | |
| JP5483042B2 (ja) | ブレーキ制御装置 | |
| JP5672430B2 (ja) | ブレーキ制御装置 | |
| CN102463976B (zh) | 电动助力装置 | |
| JP5569688B2 (ja) | ブレーキ装置 | |
| JP2009173082A (ja) | ブレーキ装置 | |
| JP2014046857A (ja) | 電動倍力装置 | |
| KR20210013112A (ko) | 전동 브레이크 장치, 전동 브레이크 제어 장치 및 브레이크 제어 장치 | |
| JP2017095067A (ja) | 車両の停止維持装置 | |
| JP5648798B2 (ja) | ブレーキ装置 | |
| JP5784328B2 (ja) | ブレーキ装置 | |
| JP5545487B2 (ja) | ブレーキ制御装置 | |
| JP6221118B2 (ja) | ブレーキシステム | |
| JP5556861B2 (ja) | ブレーキ装置 | |
| JP5769787B2 (ja) | ブレーキ制御装置 | |
| JP6049540B2 (ja) | ブレーキ制御装置 | |
| JP2014094707A (ja) | ブレーキ制御装置 | |
| WO2022244405A1 (ja) | ブレーキ装置の制御装置、ブレーキ装置の制御方法およびブレーキ装置 | |
| JP5775290B2 (ja) | ブレーキ制御装置 | |
| JP2012106556A (ja) | ブレーキ制御装置 | |
| JP2012116278A (ja) | ブレーキ制御装置 | |
| JP6955979B2 (ja) | 電動ブレーキ装置 | |
| JP2011218976A (ja) | ブレーキ制御装置 | |
| JP2014091444A (ja) | ブレーキ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131031 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131031 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140625 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140829 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141001 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141028 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5648798 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |