JP2013111663A - 操作装置および可動機械制御システム - Google Patents
操作装置および可動機械制御システム Download PDFInfo
- Publication number
- JP2013111663A JP2013111663A JP2011257134A JP2011257134A JP2013111663A JP 2013111663 A JP2013111663 A JP 2013111663A JP 2011257134 A JP2011257134 A JP 2011257134A JP 2011257134 A JP2011257134 A JP 2011257134A JP 2013111663 A JP2013111663 A JP 2013111663A
- Authority
- JP
- Japan
- Prior art keywords
- language
- name
- unit
- operator
- guide
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Numerical Control (AREA)
- Manipulator (AREA)
Abstract
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には、操作キーの名称が作業者の母国語とは異なる言語で印字されている。操作装置TPの本体または接続先のコントローラは、操作キーの名称を作業者の母国語によってガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、作業者の母国語によって操作キーの名称および画像が表示部5に表示される。本発明により、作業者は自身が普段使用する母国語によってキー名称を認識することができる。
【選択図】図2
Description
前記制御対象を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、
前記操作子の各々の名称を前記第1言語とは異なる他言語でガイドするためのガイド情報を記憶する記憶手段と、
所定の操作を入力として前記ガイド情報を前記表示部に出力するガイド情報制御手段と、を備えたことを特徴とする操作装置である。
前記ガイド情報制御手段は、前記所定の操作がなされたときに前記ガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置である。
前記ガイド情報制御手段は、前記所定の操作がなされたときに、前記名称レイアウト情報に従って前記操作部画像データに前記名称データを重ね合わせてガイド表示データを生成し、このガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置である。
前記操作装置は、前記可動機械を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、を有しており、
前記コントローラまたは前記操作装置の少なくともいずれか一方は、
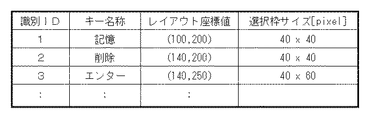
印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の各々に対応し前記第1言語とは異なる他言語で表現された名称、識別IDおよび前記操作部画像データ上の操作子レイアウト情報を関連付けた操作子テーブルとを記憶する記憶手段と、
所定の操作を入力として、前記名称を前記表示部の第1領域に出力し、前記操作部画像データを前記表示部の第2領域に出力する出力手段と、
前記第1領域に表示された名称の中からいずれか1つを選択する第1領域選択手段と、
前記第2領域で表示された複数の操作子の中からいずれか1つを選択する第2領域選択手段と、
前記第1領域および前記第2領域での互いの選択結果を前記識別IDおよび前記レイアウト情報に基づいて連動させるガイド情報制御手段と、を備えたことを特徴とする可動機械制御システムである。
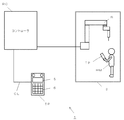
図1は、本発明に係る操作装置を産業用のロボット制御システムに組み込んだ場合の構成図である。同図に示すように、ロボット制御システム1は、アーク溶接、スポット溶接等の作業を行うロボットR、作業者HMが教示作業を行う際に用いる操作装置としてのティーチペンダントTP、そしてロボットRの動作制御を行うコントローラRCから大略構成される。
次に、本発明の第2実施形態について説明する。第1実施形態では、ディスプレイ5に表示するガイド表示データを、日本語用、英語用等、言語毎に複数設けた。しかしながら、言語毎にガイド表示データを複数設ける方式では、それだけ記憶容量を費やしてしまう。そこで、操作キー8の名称を付記する以前の操作部画像データと、言語情報とを別々に保存しておき、ガイド表示の操作要求があるタイミングで両者を合成してガイド表示データを作成し表示するというのが第2実施形態である。以下、第1実施形態との相違部分について説明する。
次に、本発明の第3実施形態について説明する。第1および第2実施形態では、操作部6の画像である操作部画像データにキー名称を付記したガイド表示データを言語毎に表示するよう構成した。第3実施形態では、ディスプレイ5をタッチパネルにより構成し、さらに、キー名称を表示する第1領域と操作部画像データを表示する第2領域とに分けて表示し、両表示領域を連動させるようにしている。以下、第2実施形態との相違部分について説明する。
R ロボット
RC コントローラ
TP ティーチペンダント
1 ロボット制御システム
2 安全柵
4 非常停止スイッチ
5 ディスプレイ
6 操作部
7 ジョグダイヤル
8 操作キー
9 バス
12 通信インターフェース
13 CPU
14 RAM
16 ハードディスク
17 動作制御部
18 駆動指令部
19 ハードディスク
21 通信処理部
25 表示処理部
26 解釈実行部
27 ガイド情報
30 教示データ
32 通信インターフェース
33 CPU
34 RAM
36 ハードディスク
39 バス
41 通信処理部
45 表示制御部
46 キー入力監視部
51 第1領域
52 第2領域
Claims (13)
- 制御対象を操作する操作装置であって、
前記制御対象を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、
前記操作子の各々の名称を前記第1言語とは異なる他言語でガイドするためのガイド情報を記憶する記憶手段と、
所定の操作を入力として前記ガイド情報を前記表示部に出力するガイド情報制御手段と、を備えたことを特徴とする操作装置。 - 前記ガイド情報は、前記操作部を画像化した操作部画像データ内に描画された各々の操作子の名称を前記他言語で識別可能に付記したガイド表示データであり、
前記ガイド情報制御手段は、前記所定の操作がなされたときに前記ガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置。 - 前記ガイド表示データは、複数の言語に各々対応して設けられていることを特徴とする請求項2記載の操作装置。
- 前記記憶手段は、印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の名称データおよびこの名称データの前記操作部画像データ上におけるレイアウト位置を示す名称レイアウト情報を関連付けた操作子名称テーブルとを記憶しており、
前記ガイド情報制御手段は、前記所定の操作がなされたときに、前記名称レイアウト情報に従って前記操作部画像データに前記名称データを重ね合わせてガイド表示データを生成し、このガイド表示データを前記表示部に出力することを特徴とする請求項1記載の操作装置。 - 前記操作子名称テーブルは、複数の言語に各々対応して設けられていることを特徴とする請求項4記載の操作装置。
- 前記ガイド情報制御手段は、前記第1言語とは異なる予め定めた第2言語の名称データを用いて前記ガイド表示データを生成することを特徴とする請求項3または請求項5記載の操作装置。
- 前記表示部に表示された前記第2言語のガイド表示データを別の他言語に切り換えるための言語切換え手段を備えたことを特徴とする請求項6記載の操作装置。
- 前記操作部画像データには、各々の操作子を識別するための識別IDがさらに描画されていることを特徴とする請求項2〜7のいずれか1項に記載の操作装置。
- 前記ガイド情報制御手段は、前記ガイド表示データを半透明加工し、前記表示部で表示中の画面に重ねて表示することを特徴とする請求項3〜8のいずれか1項に記載の操作装置。
- 請求項1〜9のいずれか1項に記載の操作装置と、前記制御対象としての可動機械と、この可動機械を制御するためのコントローラとが通信可能に接続されたことを特徴とする可動機械制御システム。
- 前記記憶手段および前記ガイド情報制御手段は、前記コントローラに備えられていることを特徴とする請求項10記載の可動機械制御システム。
- 可動機械を制御するためのコントローラと、このコントローラと通信可能に接続された操作装置とを有する可動機械制御システムにおいて、
前記操作装置は、前記可動機械を操作するための複数の操作子がレイアウトされるとともに、前記操作子の名称が第1言語で印字された操作部および前記操作子の入力に応じた画面が表示される表示部と、を有しており、
前記コントローラまたは前記操作装置の少なくともいずれか一方は、
印字された前記第1言語を消去した態様で前記操作部を画像化した操作部画像データと、前記操作子の各々に対応し前記第1言語とは異なる他言語で表現された名称、識別IDおよび前記操作部画像データ上の操作子レイアウト情報を関連付けた操作子テーブルとを記憶する記憶手段と、
所定の操作を入力として、前記名称を前記表示部の第1領域に出力し、前記操作部画像データを前記表示部の第2領域に出力する出力手段と、
前記第1領域に表示された名称の中からいずれか1つを選択する第1領域選択手段と、
前記第2領域で表示された複数の操作子の中からいずれか1つを選択する第2領域選択手段と、
前記第1領域および前記第2領域での互いの選択結果を前記識別IDおよび前記レイアウト情報に基づいて連動させるガイド情報制御手段と、を備えたことを特徴とする可動機械制御システム。 - 前記表示部はタッチパネルからなり、前記第1領域における前記操作子の選択は、前記タッチパネルから得られた位置情報により行われることを特徴とする請求項12記載の可動機械制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011257134A JP5888643B2 (ja) | 2011-11-25 | 2011-11-25 | 操作装置および可動機械制御システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011257134A JP5888643B2 (ja) | 2011-11-25 | 2011-11-25 | 操作装置および可動機械制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013111663A true JP2013111663A (ja) | 2013-06-10 |
| JP5888643B2 JP5888643B2 (ja) | 2016-03-22 |
Family
ID=48707765
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011257134A Active JP5888643B2 (ja) | 2011-11-25 | 2011-11-25 | 操作装置および可動機械制御システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5888643B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016018539A (ja) * | 2014-07-11 | 2016-02-01 | 三菱電機株式会社 | シミュレーション画像表示装置 |
| CN114944087A (zh) * | 2022-06-27 | 2022-08-26 | 珠海格力电器股份有限公司 | 一种示教器的控制方法、装置、系统和示教器 |
| DE112021001115T5 (de) | 2020-02-19 | 2022-12-29 | Fanuc Corporation | Anzeigesystem mit Elementanzeigeüberführungsfunktion |
Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6061807A (ja) * | 1983-09-13 | 1985-04-09 | Daihen Corp | 工業用ロボツトの制御装置 |
| JPH07253779A (ja) * | 1994-03-15 | 1995-10-03 | Yamaha Corp | 電子楽器 |
| JPH09130695A (ja) * | 1995-11-02 | 1997-05-16 | Toshiba Corp | オンスクリーンディスプレイ装置 |
| JPH1032231A (ja) * | 1996-05-17 | 1998-02-03 | Tokyo Electron Ltd | 検査装置 |
| JPH11288310A (ja) * | 1998-02-03 | 1999-10-19 | Denso Corp | ロボット装置 |
| JPH11327746A (ja) * | 1998-03-16 | 1999-11-30 | Seiko Epson Corp | 対話型処理システム |
| JP2001088069A (ja) * | 1999-09-21 | 2001-04-03 | Denso Corp | ロボットの教示装置 |
| JP2002127057A (ja) * | 2000-10-25 | 2002-05-08 | Matsushita Electric Ind Co Ltd | ロボットの教示装置 |
| JP2002278665A (ja) * | 2001-03-21 | 2002-09-27 | Wesutoron Kk | 装置の取扱説明手段 |
| JP2002315036A (ja) * | 2001-04-17 | 2002-10-25 | J-Nextel Inc | 通信ネットワークによる地図情報の提供及び取得方法、地図情報の提供及び取得通信システム及びそのプログラム |
| JP2008052868A (ja) * | 2006-08-28 | 2008-03-06 | Funai Electric Co Ltd | ディスク記録再生装置 |
| JP2008080475A (ja) * | 2006-08-29 | 2008-04-10 | Daihen Corp | ロボット制御システム |
| JP2009089068A (ja) * | 2007-09-28 | 2009-04-23 | Victor Co Of Japan Ltd | 電子機器の制御装置、制御方法及び制御プログラム |
| JPWO2009139048A1 (ja) * | 2008-05-13 | 2011-09-15 | 治貞 小野 | 多言語表示機能付き地図検索システム |
-
2011
- 2011-11-25 JP JP2011257134A patent/JP5888643B2/ja active Active
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6061807A (ja) * | 1983-09-13 | 1985-04-09 | Daihen Corp | 工業用ロボツトの制御装置 |
| JPH07253779A (ja) * | 1994-03-15 | 1995-10-03 | Yamaha Corp | 電子楽器 |
| JPH09130695A (ja) * | 1995-11-02 | 1997-05-16 | Toshiba Corp | オンスクリーンディスプレイ装置 |
| JPH1032231A (ja) * | 1996-05-17 | 1998-02-03 | Tokyo Electron Ltd | 検査装置 |
| JPH11288310A (ja) * | 1998-02-03 | 1999-10-19 | Denso Corp | ロボット装置 |
| JPH11327746A (ja) * | 1998-03-16 | 1999-11-30 | Seiko Epson Corp | 対話型処理システム |
| JP2001088069A (ja) * | 1999-09-21 | 2001-04-03 | Denso Corp | ロボットの教示装置 |
| JP2002127057A (ja) * | 2000-10-25 | 2002-05-08 | Matsushita Electric Ind Co Ltd | ロボットの教示装置 |
| JP2002278665A (ja) * | 2001-03-21 | 2002-09-27 | Wesutoron Kk | 装置の取扱説明手段 |
| JP2002315036A (ja) * | 2001-04-17 | 2002-10-25 | J-Nextel Inc | 通信ネットワークによる地図情報の提供及び取得方法、地図情報の提供及び取得通信システム及びそのプログラム |
| JP2008052868A (ja) * | 2006-08-28 | 2008-03-06 | Funai Electric Co Ltd | ディスク記録再生装置 |
| JP2008080475A (ja) * | 2006-08-29 | 2008-04-10 | Daihen Corp | ロボット制御システム |
| JP2009089068A (ja) * | 2007-09-28 | 2009-04-23 | Victor Co Of Japan Ltd | 電子機器の制御装置、制御方法及び制御プログラム |
| JPWO2009139048A1 (ja) * | 2008-05-13 | 2011-09-15 | 治貞 小野 | 多言語表示機能付き地図検索システム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016018539A (ja) * | 2014-07-11 | 2016-02-01 | 三菱電機株式会社 | シミュレーション画像表示装置 |
| DE112021001115T5 (de) | 2020-02-19 | 2022-12-29 | Fanuc Corporation | Anzeigesystem mit Elementanzeigeüberführungsfunktion |
| CN114944087A (zh) * | 2022-06-27 | 2022-08-26 | 珠海格力电器股份有限公司 | 一种示教器的控制方法、装置、系统和示教器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5888643B2 (ja) | 2016-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5863414B2 (ja) | 操作装置および可動機械制御システム | |
| CN104440120B (zh) | Nc工具机的操作装置 | |
| EP0792726B1 (en) | Teach pendant | |
| JP6737764B2 (ja) | ロボットに対して教示操作を行う教示装置 | |
| US8185846B2 (en) | Teaching box for use in robot, customization method, and robot system using the same | |
| US20220119233A1 (en) | Method and device for controlling a materials handling and/or construction machine | |
| EP2557466B1 (en) | Portable remote controller and robotic system | |
| JP5458616B2 (ja) | ロボット制御命令入力装置 | |
| JP4347313B2 (ja) | ロボット教示操作盤 | |
| JP2005193338A (ja) | 産業用ロボット | |
| JP2020049569A (ja) | ロボットのプログラム作成支援装置 | |
| JP5157946B2 (ja) | タッチパネル式入力装置及びタッチパネル式入力装置の画面表示方法 | |
| JP5888643B2 (ja) | 操作装置および可動機械制御システム | |
| JP2010120095A (ja) | ロボットシステム | |
| JP6323841B2 (ja) | 作業機用表示装置 | |
| JP5510210B2 (ja) | 操作器の表示制御装置、及び操作器の表示制御方法 | |
| JP5630589B1 (ja) | 表示器及びプログラマブル表示器 | |
| JP2013154410A (ja) | 教示装置 | |
| JP6575130B2 (ja) | 画面情報生成装置 | |
| JP2013058219A (ja) | タッチパネル式入力装置及びタッチパネル式入力装置の画面表示方法 | |
| WO2019039197A1 (ja) | ユーザインタフェース開発支援装置、ユーザインタフェース開発支援方法、および、ユーザインタフェース開発支援プログラム | |
| JP7553612B2 (ja) | 教示装置 | |
| JP5556634B2 (ja) | 操作器の表示制御装置、及び操作器の表示制御方法 | |
| JP5464252B2 (ja) | タッチパネル式入力装置及びタッチパネル式入力装置の画面表示方法 | |
| JP2003039357A (ja) | ロボットの教示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141029 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150826 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150929 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5888643 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |