JP2012246944A - 旋回式作業機械 - Google Patents
旋回式作業機械 Download PDFInfo
- Publication number
- JP2012246944A JP2012246944A JP2011116870A JP2011116870A JP2012246944A JP 2012246944 A JP2012246944 A JP 2012246944A JP 2011116870 A JP2011116870 A JP 2011116870A JP 2011116870 A JP2011116870 A JP 2011116870A JP 2012246944 A JP2012246944 A JP 2012246944A
- Authority
- JP
- Japan
- Prior art keywords
- flow rate
- turning
- pump
- rotation speed
- operation amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000001133 acceleration Effects 0.000 claims description 10
- 230000007423 decrease Effects 0.000 claims description 7
- 238000001514 detection method Methods 0.000 claims description 5
- 239000013641 positive control Substances 0.000 abstract description 25
- 230000007935 neutral effect Effects 0.000 description 11
- 238000004891 communication Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 238000009412 basement excavation Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 239000003990 capacitor Substances 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 230000004043 responsiveness Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images





Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2296—Systems with a variable displacement pump
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
- E02F9/10—Supports for movable superstructures mounted on travelling or walking gears or on other superstructures
- E02F9/12—Slewing or traversing gears
- E02F9/121—Turntables, i.e. structure rotatable about 360°
- E02F9/123—Drives or control devices specially adapted therefor
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
- E02F9/2235—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B11/00—Automatic controllers
- G05B11/01—Automatic controllers electric
- G05B11/14—Automatic controllers electric in which the output signal represents a discontinuous function of the deviation from the desired value, i.e. discontinuous controllers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B9/00—Servomotors with follow-up action, e.g. obtained by feed-back control, i.e. in which the position of the actuated member conforms with that of the controlling member
- F15B9/02—Servomotors with follow-up action, e.g. obtained by feed-back control, i.e. in which the position of the actuated member conforms with that of the controlling member with servomotors of the reciprocatable or oscillatable type
- F15B9/03—Servomotors with follow-up action, e.g. obtained by feed-back control, i.e. in which the position of the actuated member conforms with that of the controlling member with servomotors of the reciprocatable or oscillatable type with electrical control means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B9/00—Servomotors with follow-up action, e.g. obtained by feed-back control, i.e. in which the position of the actuated member conforms with that of the controlling member
- F15B9/14—Servomotors with follow-up action, e.g. obtained by feed-back control, i.e. in which the position of the actuated member conforms with that of the controlling member with rotary servomotors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45012—Excavator
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T137/00—Fluid handling
- Y10T137/8593—Systems
- Y10T137/85978—With pump
- Y10T137/85986—Pumped fluid control
- Y10T137/86027—Electric
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Fluid Mechanics (AREA)
- Fluid-Pressure Circuits (AREA)
- Operation Control Of Excavators (AREA)
Abstract
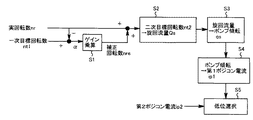
【解決手段】旋回操作量で決まる一次目標回転数nt1と実回転数nrの偏差αに操作量に応じたゲインを乗じて補正回転数nreを求め、この補正回転数nreと実回転数nrの和で決まる二次目標回転数nt2から旋回モータ11に供給すべき旋回流量Qsを求める。この旋回流量Qsからポンプ傾転qsを求め、この傾転を実現するための第1ポジコン電流ip1を求める。一方、旋回操作量から一意的に決まる目標流量を元に第2ポジコン電流ip2を求め、両ポジコン電流ip1,ip2の低位選択を行って得られた方をポンプレギュレータに送るようにした。
【選択図】図2
Description
2 上部旋回体
3 掘削アタッチメント
10 油圧ポンプ
11 旋回モータ
12 リモコン弁(旋回操作手段)
13 コントロールバルブ
14,15 モータ両側管路
25 ポンプレギュレータ
26 制御手段としてのコントローラ
27 メインリリーフ弁
28 センサ
28 パイロット圧センサ
30 回転数センサ
Claims (3)
- 下部走行体と、この下部走行体上に旋回自在に搭載された上部旋回体と、この上部旋回体の旋回駆動源としての旋回モータと、この旋回モータの圧油供給源としての可変容量型の油圧ポンプと、この油圧ポンプの吐出流量を可変制御するポンプレギュレータと、旋回の加速、定常運転、減速、停止を指令する旋回操作手段と、この旋回操作手段の操作に基づいて上記旋回モータに対する圧油の供給方向と供給量を制御するコントロールバルブと上記油圧ポンプの吐出流量のうち余剰流量をタンクに戻すリリーフ弁と、上記旋回操作手段の操作方向と操作量を検出する操作検出手段と、上記旋回モータの回転数を検出するモータ回転数検出手段と、上記油圧ポンプの吐出流量を上記ポンプレギュレータに指令する制御手段とを備え、上記制御手段は、上記旋回操作手段の操作量から求められる上記旋回モータの目標回転数と、上記モータ回転数検出手段によって検出される上記旋回モータの実回転数の偏差に基づいて余剰流量を求め、この余剰流量が0となるようにポンプ吐出流量を制御するように構成したことを特徴とする旋回式作業機械。
- 上記制御手段は、上記旋回操作手段の操作量から求められる目標回転数を一次目標回転数とし、上記操作量に応じて、大操作量で小さくなるゲインを上記一次目標回転数と実回転数の偏差に乗じて補正回転数を求め、この補正回転数と上記実回転数の和で決まる二次目標回転数から上記旋回モータに供給すべき旋回流量を求め、この旋回流量が得られるようにポンプ吐出流量を制御するように構成したことを特徴とする請求項1記載の旋回式作業機械。
- 上記制御手段は、上記ポンプ吐出流量について、上記旋回操作手段の操作量と偏差に基づいて求められる第1の値と、上記旋回操作手段の操作量のみに応じて決まる第2の値の低位選択を行い、選択された値に向けてポンプ吐出流量を制御するように構成したことを特徴とする請求項1または2記載の旋回式作業機械。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011116870A JP5738674B2 (ja) | 2011-05-25 | 2011-05-25 | 旋回式作業機械 |
| PCT/JP2012/003095 WO2012160770A1 (ja) | 2011-05-25 | 2012-05-11 | 旋回式作業機械 |
| US14/115,282 US9624647B2 (en) | 2011-05-25 | 2012-05-11 | Slewing-type working machine |
| CN201280025372.9A CN103562565B (zh) | 2011-05-25 | 2012-05-11 | 回转式工程机械 |
| EP12790079.3A EP2716919B1 (en) | 2011-05-25 | 2012-05-11 | Rotary work machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011116870A JP5738674B2 (ja) | 2011-05-25 | 2011-05-25 | 旋回式作業機械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012246944A true JP2012246944A (ja) | 2012-12-13 |
| JP5738674B2 JP5738674B2 (ja) | 2015-06-24 |
Family
ID=47216864
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011116870A Active JP5738674B2 (ja) | 2011-05-25 | 2011-05-25 | 旋回式作業機械 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9624647B2 (ja) |
| EP (1) | EP2716919B1 (ja) |
| JP (1) | JP5738674B2 (ja) |
| CN (1) | CN103562565B (ja) |
| WO (1) | WO2012160770A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018079193A1 (ja) * | 2016-10-25 | 2018-05-03 | 川崎重工業株式会社 | 建設機械の油圧駆動システム |
| WO2021054088A1 (ja) | 2019-09-20 | 2021-03-25 | 日立建機株式会社 | 建設機械 |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011015286A1 (de) * | 2011-03-28 | 2012-10-04 | Liebherr-Werk Nenzing Gmbh | Hydraulische Bremsvorrichtung für einen Kranantreib sowie Kran |
| WO2013002152A1 (ja) * | 2011-06-27 | 2013-01-03 | 住友重機械工業株式会社 | ハイブリッド式作業機械及びその制御方法 |
| JP5590074B2 (ja) * | 2012-06-26 | 2014-09-17 | コベルコ建機株式会社 | 旋回式作業機械 |
| JP5783184B2 (ja) * | 2013-01-10 | 2015-09-24 | コベルコ建機株式会社 | 建設機械 |
| CN103215982B (zh) * | 2013-04-16 | 2015-10-14 | 三一重机有限公司 | 混合动力回转驱动系统和工程机械 |
| JP5991950B2 (ja) * | 2013-07-08 | 2016-09-14 | 日立建機株式会社 | 建設機械の油圧回路 |
| JP6149819B2 (ja) * | 2014-07-30 | 2017-06-21 | コベルコ建機株式会社 | 建設機械の旋回制御装置 |
| JP6335093B2 (ja) * | 2014-10-10 | 2018-05-30 | 川崎重工業株式会社 | 建設機械の油圧駆動システム |
| ES2959695T3 (es) | 2016-11-02 | 2024-02-27 | Doosan Bobcat North America Inc | Sistema y procedimiento para definir una zona de funcionamiento de un brazo elevador |
| JP6981186B2 (ja) | 2017-11-08 | 2021-12-15 | コベルコ建機株式会社 | 旋回式作業機械 |
| JP6975036B2 (ja) * | 2017-12-28 | 2021-12-01 | 日立建機株式会社 | 作業機械 |
| JP6687054B2 (ja) * | 2018-03-29 | 2020-04-22 | コベルコ建機株式会社 | 旋回式作業機械 |
| CN111868337B (zh) * | 2018-03-30 | 2023-05-02 | 住友建机株式会社 | 挖土机、信息处理装置 |
| CN108978771A (zh) * | 2018-06-28 | 2018-12-11 | 柳州柳工挖掘机有限公司 | 回转液压系统及挖掘机 |
| JP7205264B2 (ja) * | 2019-02-05 | 2023-01-17 | コベルコ建機株式会社 | 作業機械の旋回駆動装置 |
| CN110409538B (zh) * | 2019-06-28 | 2021-10-29 | 三一重机有限公司 | 液压挖掘机回转制动控制方法、装置、控制器及存储介质 |
| US11248362B2 (en) * | 2019-10-31 | 2022-02-15 | Deere & Company | Closed loop feedback circle drive systems for motor graders |
| CN110725360A (zh) * | 2019-12-03 | 2020-01-24 | 湖南力诚新能源科技有限公司 | 一种电动挖掘机液压泵控制装置及液压泵的控制方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0745748B2 (ja) * | 1987-07-31 | 1995-05-17 | 日立建機株式会社 | 旋回体駆動制御装置 |
| JP3352837B2 (ja) * | 1995-01-19 | 2002-12-03 | 日立建機株式会社 | クレーンの旋回制御装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3999387A (en) * | 1975-09-25 | 1976-12-28 | Knopf Frank A | Closed loop control system for hydrostatic transmission |
| EP0567698B1 (en) * | 1992-04-29 | 1997-10-22 | Kayaba Industry Co., Ltd. | Input apparatus |
| JP3368624B2 (ja) | 1993-08-03 | 2003-01-20 | 住友電気工業株式会社 | 半導体装置用基板 |
| JP3582679B2 (ja) * | 1996-01-19 | 2004-10-27 | 株式会社小松製作所 | 油圧ショベルの旋回油圧回路 |
| DE19615593B4 (de) * | 1996-04-19 | 2007-02-22 | Linde Ag | Hydrostatisches Antriebssystem |
| US5941155A (en) * | 1996-11-20 | 1999-08-24 | Kabushiki Kaisha Kobe Seiko Sho | Hydraulic motor control system |
| JP3884178B2 (ja) * | 1998-11-27 | 2007-02-21 | 日立建機株式会社 | 旋回制御装置 |
| US20050161090A1 (en) | 2002-04-26 | 2005-07-28 | Hitachi Construction Machinery Co., Ltd | Travel control device of hydraulically driven vehicle, hydraulically driven vehicle, and wheel hydraulic shovel |
| JP3925416B2 (ja) | 2003-01-27 | 2007-06-06 | コベルコ建機株式会社 | 作業機械の油圧制御装置 |
| JP2004347040A (ja) | 2003-05-22 | 2004-12-09 | Kobelco Contstruction Machinery Ltd | 作業機械の制御装置 |
| CN102803621A (zh) * | 2009-06-25 | 2012-11-28 | 日立建机株式会社 | 作业机械的旋转控制装置 |
| KR101112135B1 (ko) | 2009-07-28 | 2012-02-22 | 볼보 컨스트럭션 이큅먼트 에이비 | 전기모터를 이용한 건설기계의 선회 제어시스템 및 방법 |
| JP5542016B2 (ja) * | 2010-09-15 | 2014-07-09 | 川崎重工業株式会社 | 作業機械の駆動制御方法 |
| JP5548113B2 (ja) * | 2010-12-17 | 2014-07-16 | 川崎重工業株式会社 | 作業機械の駆動制御方法 |
-
2011
- 2011-05-25 JP JP2011116870A patent/JP5738674B2/ja active Active
-
2012
- 2012-05-11 CN CN201280025372.9A patent/CN103562565B/zh active Active
- 2012-05-11 WO PCT/JP2012/003095 patent/WO2012160770A1/ja active Application Filing
- 2012-05-11 US US14/115,282 patent/US9624647B2/en active Active
- 2012-05-11 EP EP12790079.3A patent/EP2716919B1/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0745748B2 (ja) * | 1987-07-31 | 1995-05-17 | 日立建機株式会社 | 旋回体駆動制御装置 |
| JP3352837B2 (ja) * | 1995-01-19 | 2002-12-03 | 日立建機株式会社 | クレーンの旋回制御装置 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018079193A1 (ja) * | 2016-10-25 | 2018-05-03 | 川崎重工業株式会社 | 建設機械の油圧駆動システム |
| JP2018071573A (ja) * | 2016-10-25 | 2018-05-10 | 川崎重工業株式会社 | 建設機械の油圧駆動システム |
| CN109790857A (zh) * | 2016-10-25 | 2019-05-21 | 川崎重工业株式会社 | 建筑机械的油压驱动系统 |
| GB2570430A (en) * | 2016-10-25 | 2019-07-24 | Kawasaki Heavy Ind Ltd | Hydraulic drive system for construction machine |
| CN109790857B (zh) * | 2016-10-25 | 2020-05-05 | 川崎重工业株式会社 | 建筑机械的油压驱动系统 |
| GB2570430B (en) * | 2016-10-25 | 2021-11-17 | Kawasaki Heavy Ind Ltd | Hydraulic drive system of construction machine |
| WO2021054088A1 (ja) | 2019-09-20 | 2021-03-25 | 日立建機株式会社 | 建設機械 |
| KR20220033514A (ko) | 2019-09-20 | 2022-03-16 | 히다치 겡키 가부시키 가이샤 | 건설기계 |
| US11781285B2 (en) | 2019-09-20 | 2023-10-10 | Hitachi Construction Machinery Co., Ltd. | Construction machine |
Also Published As
| Publication number | Publication date |
|---|---|
| US9624647B2 (en) | 2017-04-18 |
| EP2716919B1 (en) | 2016-11-02 |
| JP5738674B2 (ja) | 2015-06-24 |
| US20140166135A1 (en) | 2014-06-19 |
| CN103562565A (zh) | 2014-02-05 |
| EP2716919A1 (en) | 2014-04-09 |
| EP2716919A4 (en) | 2015-05-06 |
| CN103562565B (zh) | 2015-09-30 |
| WO2012160770A1 (ja) | 2012-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5738674B2 (ja) | 旋回式作業機械 | |
| US10787790B2 (en) | Work machine | |
| EP3306112B1 (en) | Construction-machine hydraulic control device | |
| JP5927188B2 (ja) | 建設機械用の旋回流量制御システム及びその制御方法 | |
| JP5886976B2 (ja) | 作業機械 | |
| JP5984165B2 (ja) | 作業機械の油圧制御装置 | |
| WO2013099710A1 (ja) | 作業機械の動力回生装置および作業機械 | |
| KR102451430B1 (ko) | 건설 기계의 선회 구동 장치 | |
| JP2017116075A (ja) | 建設機械の油圧制御装置 | |
| WO2019220872A1 (ja) | 作業機械の油圧駆動装置 | |
| WO2012133104A1 (ja) | 油圧作業機の油圧システム | |
| JP5424982B2 (ja) | ハイブリッド作業機械 | |
| WO2015151776A1 (ja) | 作業機械の油圧制御装置 | |
| US9593464B2 (en) | Construction machine | |
| JP7001574B2 (ja) | 建設機械 | |
| JP5357073B2 (ja) | 建設機械のポンプ制御装置 | |
| JP2016038074A (ja) | 旋回式作業機械の制御装置 | |
| JP2021021199A (ja) | ショベル | |
| JP2012007656A (ja) | 作業機械の旋回用油圧制御装置 | |
| JP5071572B1 (ja) | 旋回式作業機械 | |
| JP2017020233A (ja) | 作業機械の制御装置 | |
| JPH11181839A (ja) | 旋回作業機の旋回制御装置 | |
| JP2012159123A (ja) | 建設機械の油圧駆動装置 | |
| JP2020076474A (ja) | 建設機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150414 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150422 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5738674 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |