JP2012178927A - インバータ制御装置 - Google Patents
インバータ制御装置 Download PDFInfo
- Publication number
- JP2012178927A JP2012178927A JP2011040298A JP2011040298A JP2012178927A JP 2012178927 A JP2012178927 A JP 2012178927A JP 2011040298 A JP2011040298 A JP 2011040298A JP 2011040298 A JP2011040298 A JP 2011040298A JP 2012178927 A JP2012178927 A JP 2012178927A
- Authority
- JP
- Japan
- Prior art keywords
- phase
- voltage
- current
- correction
- axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





















Abstract
【課題】電圧指令ベクトルの補正による相電流の歪みを軽減できるインバータ制御装置を提供する。
【解決手段】インバータの三相電圧が追従すべき電圧のベクトルであって、三相の各相電圧の合成電圧のベクトルからなる電圧指令ベクトルを作成する電圧指令ベクトル作成手段と、作成された前記電圧指令ベクトルを補正する電圧指令ベクトル補正手段とを備え、補正後の前記電圧指令ベクトルに従って前記インバータを制御すると共に、前記電圧指令ベクトル補正手段は、当該電圧指令ベクトル補正手段によって補正された後の前記電圧指令ベクトルが、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるように補正し、キャリア周期内の電流非検出区間においては、前記電流検出区間における補正を打ち消す逆補正を行う。
【選択図】図1
【解決手段】インバータの三相電圧が追従すべき電圧のベクトルであって、三相の各相電圧の合成電圧のベクトルからなる電圧指令ベクトルを作成する電圧指令ベクトル作成手段と、作成された前記電圧指令ベクトルを補正する電圧指令ベクトル補正手段とを備え、補正後の前記電圧指令ベクトルに従って前記インバータを制御すると共に、前記電圧指令ベクトル補正手段は、当該電圧指令ベクトル補正手段によって補正された後の前記電圧指令ベクトルが、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるように補正し、キャリア周期内の電流非検出区間においては、前記電流検出区間における補正を打ち消す逆補正を行う。
【選択図】図1
Description
本発明は、モータ等を駆動するためのインバータを制御するインバータ制御装置に関し、特に、1シャント電流検出方式を採用したインバータ制御装置に関する。
モータに三相交流電力を供給してモータをベクトル制御するためには、U相、V相及びW相の3相の内、2相分の相電流(例えばU相電流及びV相電流)を検出する必要がある。2相分の相電流を検出するための電流検出方式として、1シャント電流検出方式(シングルシャント電流検出方式)が提案されている。1シャント電流検出方式では、インバータと直流電源とを結ぶ配線上に1つの電流センサを設け、その電流センサの出力信号を適切なタイミングでサンプリングすることによって2相分の相電流を検出する。
この1シャント電流検出方式を採用したモータ駆動システムに有益なインバータ制御方法が、下記特許文献1に開示されている。このインバータ制御方法では、PWMインバータの出力電圧ベクトル(モータの印加電圧ベクトル)を指定する電圧指令ベクトルを作成した後、a軸及びb軸を座標軸として有するab座標系上で、その電圧指令ベクトルを補正することにより、確実なる相電流検出を実現している。a軸は、電圧指令ベクトルの、固定座標系上における位相に応じて、電気角60度ごとにステップ的に回転する軸である。b軸は、a軸に対して電気角90度だけ位相が進んだ軸である。
ここで、インバータを構成する各スイッチング素子を制御して三相変調を行う場合、各相電圧とキャリア信号との比較が行われる。このキャリア信号は三相交流電圧の周期よりもはるかに短い周期(キャリア周期)の三角波であり、通常電流検出はこのキャリア信号のレベルが上昇していく過程で行われ、キャリア信号が下降していく過程では電流の検出を行う必要はない。
一方、前記特許文献1の如き電圧指令ベクトルの補正を行った場合、上記各相電圧が重なる付近で補正を行うため(図22参照)、各相電圧とキャリア信号との比較による電流検出を有効に行えるようになるものの、各相電流には歪みが生じる。そして、特にモータの起動時や低負荷時には、電圧指令値も低くなる関係で、係る補正を行った場合、印加するべき電圧からずれてモータが起動できなくなる問題があった。
尚、前記特許文献1では1キャリア周期毎に前回の補正量を考慮して電圧指令ベクトルを補正し直すことを行っているが、異音の発生や起動不良の問題は依然として残る。
本発明は、係る従来の技術的課題を解決するために成されたものであり、電圧指令ベクトルの補正による相電流の歪みを軽減できるインバータ制御装置を提供することを目的とする。
上記目的を達成するために本発明に係るインバータ制御装置は、キャリア信号のキャリア周期内における電流検出区間において、三相式のインバータと直流電源との間に流れる電流を検出電流として検出する電流検出手段を備え、検出された前記検出電流から前記インバータの三相電流を検出し、該三相電流に基づいて前記インバータを制御するインバータ制御装置において、前記インバータの三相電圧が追従すべき電圧のベクトルであって、三相の各相電圧の合成電圧のベクトルからなる電圧指令ベクトルを作成する電圧指令ベクトル作成手段と、作成された前記電圧指令ベクトルを補正する電圧指令ベクトル補正手段とを備え、補正後の前記電圧指令ベクトルに従って前記インバータを制御すると共に、前記電圧指令ベクトル補正手段は、当該電圧指令ベクトル補正手段によって補正された後の前記電圧指令ベクトルが、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるように補正し、前記キャリア周期内の電流非検出区間においては、前記電流検出区間における補正を打ち消す逆補正を行うことを特徴とする。
これにより、キャリア周期内において電流検出を行う必要の無い電流非検出区間において、電流検出区間で電流検出のために行った電圧指令ベクトルの補正を打ち消す逆補正を行い、補正に伴う相電流の歪みを軽減することが可能となる。
この場合、前記電圧指令ベクトル補正手段は、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるよう、前記電圧指令ベクトルに補正ベクトルを加えて補正した補正電圧指令ベクトルと、前記電圧指令ベクトルから前記補正ベクトルを減算した逆補正電圧指令ベクトルとを導出し、前記電流検出区間においては、前記補正電圧指令ベクトルに従って前記インバータを制御し、前記電流非検出区間においては、前記逆補正電圧指令ベクトルに従って前記インバータを制御する。
このように補正電圧指令ベクトルと逆補正電圧指令ベクトルの二つを演算し、電流検出区間と電流非検出区間の電圧指令値とすることにより、電流検出区間における補正を打ち消す逆補正を非電流検出区間において行うことが可能となる。
また、前記電圧指令ベクトルは、所定の固定軸を基準とした前記電圧指令ベクトルの位相に応じて電気角60度ごとにステップ的に回転するab座標上の二相の電圧指令ベクトルであり、前記電圧指令ベクトル補正手段による前記補正電圧指令ベクトル、及び、前記逆補正電圧指令ベクトルは、ab座標上において導出される。
これにより、電圧指令ベクトルの座標軸成分を補正するという簡素な処理によって、所望の補正を実現可能となる。また、補正電圧指令ベクトルだけでなく、逆補正電圧指令ベクトルも演算の簡単なab座標上で導出することができるので、演算負荷の低減を図ることができる。
また、前記電流検出区間は、前記キャリア周期の前半の周期である。このようにすることで、逆補正を行うための演算の時間を稼ぐことができるようになる。
本発明によれば、電圧指令ベクトルの補正に伴う相電流の歪みを軽減し、起動不良や異音の発生を解消若しくは抑制することが可能となる。
以下、本発明の実施の形態について図面を参照しながら具体的に説明する。参照される各図において、同一の部分には同一の符号を付し、同一の部分に関する重複する説明を原則として省略する。
図1は本発明の一実施形態に係るモータ駆動システムのブロック構成図である。図1のモータ駆動システムは、三相永久磁石同期モータ1(以下、単に「モータ1」と記す)と、PWM(Pulse Width Modulation)インバータ2(以下、単に「インバータ2」という)と、制御部3と、直流電源4と、電流センサ(電流検出手段)5とを備える。直流電源4は、負出力端子4bを低電圧側として、正出力端子4aと負出力端子4bとの間に直流電圧を出力する。図1のモータ駆動システムは、1シャント電流検出方式を採用している。
モータ1は、永久磁石が設けられた回転子6と、U相、V相、及び、W相の電機子巻線7u、7v、及び、7wが設けられた固定子7とを備えている。電機子巻線7u、7v、及び、7wは、中性点14を中心にY結線されている。電機子巻線7u、7v、及び、7wにおいて、中性点14の反対側の非結線端は、それぞれ端子12u、12v、及び、12wに接続されている。
インバータ2は、U相用のハーフブリッジ回路、V相用のハーフブリッジ回路、及び、W相用のハーフブリッジ回路を備える。各ハーフブリッジ回路は、一対のスイッチング素子を有する。各ハーフブリッジ回路において、一対のスイッチング素子は、直流電源4の正出力端子4aと負出力端子4bとの間に直列接続され、各ハーフブリッジ回路に直流電源4からの直流電圧が印加される。
U相用のハーフブリッジ回路は、高電圧側のスイッチング素子8u(以下、上アーム8uとも呼ぶ)、及び、低電圧側のスイッチング素子9u(以下、下アーム9uとも呼ぶ)から成る。V相用のハーフブリッジ回路は、高電圧側のスイッチング素子8v(以下、上アーム8vとも呼ぶ)、及び、低電圧側のスイッチング素子9v(以下、下アーム9vとも呼ぶ)から成る。W相用のハーフブリッジ回路は、高電圧側のスイッチング素子8w(以下、上アーム8wとも呼ぶ)、及び、低電圧側のスイッチング素子9w(以下、下アーム9wとも呼ぶ)から成る。また、スイッチング素子8u、8v、8w、9u、9v、及び、9wには、それぞれ並列に直流電源4の低電圧側から高電圧側に向かう方向を順方向としてダイオード10u、10v、10w、11u、11v、及び、11wが接続されている。各ダイオード10u、10v、10w、11u、11v、及び、11wはフリーホイールダイオードとして機能する。
直列接続された上アーム8uと下アーム9uの接続点、直列接続された上アーム8vと下アーム9vの接続点、直列接続された上アーム8wと下アーム9wの接続点は、それぞれ端子12u、12v及び12wに接続される。尚、図1では、各スイッチング素子として電界効果トランジスタが示されているが、それらをIGBT(絶縁ゲートバイポーラトランジスタ)などに置き換えることもできる。
インバータ2は、制御部3から与えられた三相電圧指令値に基づいて各相に対するPWM信号(パルス幅変調信号)を生成し、このPWM信号をインバータ2内の各スイッチング素子の制御端子(ベース又はゲート)に与えることで、各スイッチング素子をスイッチング動作させる。制御部3からインバータ2に供給される三相電圧指令値は、U相電圧指令値Vu*、V相電圧指令値Vv*、及び、W相電圧指令値Vw*から構成され、Vu*、Vv*、及び、Vw*によって、それぞれU相電圧Vu、V相電圧Vv、及び、W相電圧Vwの電圧レベル(電圧値)が表される。そして、インバータ2は、Vu*、Vv*、及び、Vw*に基づいて、各スイッチング素子のオン(導通)又はオフ(非導通)を制御する。
同一の相の上アームと下アームが同時にオンとなるのを防ぐためのデッドタイムを無視すると、各ハーフブリッジ回路において、上アームがオンである時は下アームはオフであり、上アームがオフである時は下アームはオンである。以下の説明は、上記デッドタイムを無視して行うものとする。
インバータ2に印加されている直流電源4からの直流電圧は、インバータ2内の各スイッチング素子のスイッチング動作によって、例えばPWM変調(パルス幅変調)された三相交流電圧に変換される。この三相交流電圧がモータ1に印加されることによって、各電機子巻線(7u、7v及び7w)に、三相交流電圧に応じた電流が流れてモータ1が駆動される。
電流センサ5は、インバータ2の母線13に流れる電流(以下、「母線電流」という)を検出する。母線電流は直流成分を有するため、それを直流電流と解釈することもできる。インバータ2において、下アーム9u、9v、及び、9wの低電圧側は共通結線されて直流電源4の負出力端子4bに接続される。下アーム9u、9v、及び、9wの低電圧側が共通結線される配線が母線13であり、電流センサ5は母線13に直列に介在している。
この電流センサ5は、検出した母線電流(検出電流)の電流値を表す信号を制御部3に伝達する。制御部3は電流センサ5の出力信号等を参照しつつ上記三相電圧指令値を生成、及び、出力する。尚、電流センサ5は、例えばシャント抵抗、又は、カレントトランス等である。また、下アーム9u、9v、及び、9wの低電圧側と負出力端子4bとを接続する配線(母線13)にではなく、上アーム8u、8v、及び、8wの高電圧側と正出力端子4aとを接続する配線に電流センサ5を設けるようにしてもよい。
ここで、図2〜図5を用いて、母線電流と各相の電機子巻線に流れる相電流との関係等について説明する。電機子巻線7u、7v、及び、7wに流れる電流を、それぞれU相電流、V相電流、及び、W相電流と呼び、それらのそれぞれを(或いは、それらを総称して)相電流と呼ぶ(図1参照)。また、相電流において、端子12u、12v、又は、12wから中性点14に流れ込む方向の電流の極性を正とし、中性点14から流れ出す方向の電流の極性を負とする。
図2はモータ1に印加される三相交流電圧の典型的な例を示す。図2において、100u、100v、及び、100wは、それぞれモータ1に印加されるべきU相電圧、V相電圧、及び、W相電圧の波形を表す。U相電圧、V相電圧、及び、W相電圧のそれぞれを(或いは、それらを総称して)相電圧と呼ぶ。モータ1に正弦波状の電流を流す場合、インバータ2の出力電圧は正弦波状とされる。尚、図2の各相電圧は理想的な正弦波となっているが、本実施形態において実際にはこの正弦波に歪みが加えられる(詳細は後述する)。
図2に示す如く、U相電圧、V相電圧、及び、W相電圧の間の電圧レベルの高低関係は、時間の経過と共に変化していく。この高低関係は三相電圧指令値によって定まり、インバータ2は、三相電圧指令値に従って各相に対する通電パターンを決定する。図3にこの通電パターンを表として示す。図3の左側から第1列目〜第3列目に通電パターンを表す。第4列目については後述する。
通電パターンには、U相、V相、及び、W相の下アームが全てオンの通電パターン「LLL」と、W相の上アームがオン、且つ、U相、及び、V相の下アームがオンの通電パターン「LLH」と、V相の上アームがオン、且つ、U相、及び、W相の下アームがオンの通電パターン「LHL」と、V相、及び、W相の上アームがオン、且つ、U相の下アームがオンの通電パターン「LHH」と、U相の上アームがオン、且つ、V相、及び、W相の下アームがオンの通電パターン「HLL」と、U相、及び、W相の上アームがオン、且つ、V相の下アームがオンの通電パターン「HLH」と、U相、及び、V相の上アームがオン、且つ、W相の下アームがオンの通電パターン「HHL」と、U相、V相、及び、W相の上アームが全てオンの通電パターン「HHH」とがある(上アーム、及び、下アームの符号(8u等)を省略して記載)。
図4に三相変調を行う場合における、各相電圧の電圧レベルとキャリア信号との関係、並びに、その関係に応じたPWM信号、及び、母線電流の波形を示す。各相電圧の電圧レベルの高低関係は様々に変化するが、説明の具体化のため、図4は図2に示す或るタイミング101に着目している。即ち、図4はW相電圧の電圧レベルが最大であって、且つ、U相電圧の電圧レベルが最小である場合を示している。電圧レベルが最大の相を「最大相」、電圧レベルが最小の相を「最小相」、電圧レベルが最大でも最小でもない相を「中間相」と呼ぶ。
図4に示す状態では、最大相、中間相及び最小相は、それぞれW相、V相、及び、U相となっている。図4において、符号CSは各相電圧の電圧レベルと比較されるキャリア信号を表す。キャリア信号は周期的な三角波信号となっており、その信号の周期をキャリア周期という。尚、キャリア周期は図2に示す三相交流電圧の周期よりもはるかに短いため、仮に図4に示すキャリア信号の三角波を図2上で表すと、その三角波は1本の線となって見える。
各キャリア周期の開始タイミング、即ちキャリア信号が最低レベルにあるタイミングをT0と呼ぶと、このタイミングT0において、各相の上アーム(8u、8v、及び、8w)はオンとされる。この場合は短絡回路が形成されて直流電源4への電流の出入りがない状態となるため、母線電流は零となる。
インバータ2は、U相電圧指令値Vu*、V相電圧指令値Vv*、及び、W相電圧指令値Vw*を参照して各相電圧の電圧レベルとキャリア信号CSを比較する。そして、キャリア信号CSのレベル(電圧レベル)の上昇過程において、最小相の電圧レベルがキャリア信号CSと交差するタイミングT1に至ると、最小相の下アームがオンとされ、最小相の電流が母線電流として流れる。図4に示す例の場合、タイミングT1から後述のタイミングT2に至るまでの間は、U相の下アーム9uがオンとなるため、U相電流(極性は負)が母線電流として流れる。
更にキャリア信号CSのレベルが上昇して中間相の電圧レベルがキャリア信号CSと交差するタイミングT2に至ると、最大相の上アームがオン、且つ、中間相、及び、最小相の下アームがオンとなって、最大相の電流が母線電流として流れる。図4に示す例の場合、タイミングT2から後述のタイミングT3に至るまでの間は、W相の上アーム8wがオン、且つ、V相、及び、U相の下アーム9v、及び、9uがオンとなるため、W相電流(極性は正)が母線電流として流れる。
更にキャリア信号CSのレベルが上昇して最大相の電圧レベルがキャリア信号CSと交差するタイミングT3に至ると、全ての相の下アームがオンとなって、短絡回路が形成されて直流電源4への電流の出入りがない状態となるため、母線電流は零となる。
タイミングT3と後述するタイミングT4の中間タイミングにおいて、キャリア信号CSが最大レベルに達した後、キャリア信号CSのレベルは下降していく。キャリア信号CSのレベルの下降過程において、最大相の電圧レベルがキャリア信号CSと交差するタイミングをT4、中間相の電圧レベルがキャリア信号CSと交差するタイミングをT5、最小相の電圧レベルがキャリア信号CSと交差するタイミングをT6、次のキャリア周期の開始タイミングをT7とすると、タイミングT4−T5間、タイミングT5−T6間、タイミングT6−T7間は、それぞれタイミングT2−T3間、タイミングT1−T2間、タイミングT0−T1間と同じ通電パターンとなる。
従って例えば、タイミングT1−T2間、或いは、タイミングT5−T6間で母線電流を検出すれば、母線電流から最小相の電流を検出することができ、タイミングT2−T3間、或いは、タイミングT4−T5間で母線電流を検出すれば、母線電流から最大相の電流を検出することができる。そして、中間相の電流は三相電流の総和が零になることを利用して計算で得ることができる。図3の表の第4列目には、各通電パターンにおいて母線電流として流れる電流の相を、電流極性付きで示している。例えば、図3の表の5行目に対応する通電パターン「LHH」においては、母線電流としてU相電流(極性は負)が流れる。
実際にはキャリア信号CSのレベルが上昇していく過程のタイミングT1−T2間、T2−T3間で電流検出を行うため、この区間が電流検出区間となる。また、上述した如くタイミングT4−T5間、T5−T6間でも電流検出は可能であるが、タイミングT1−T2間、T2−T3間で検出できればここでは必要無いので、この区間では電流検出は行わない。従って、この区間を電流非検出区間と呼ぶ。
尚、キャリア周期からタイミングT1とT6との間の期間を除いた期間は最小相に対するPWM信号のパルス幅を表し、キャリア周期からタイミングT2とT5との間の期間を除いた期間は中間相に対するPWM信号のパルス幅を表し、キャリア周期からタイミングT3とT4との間の期間を除いた期間は最大相に対するPWM信号のパルス幅を表す。
W相が最大相、且つ、U相が最小相の場合を例に挙げたが、最大相、中間相及び最小相の組み合わせは、6通りある。図5にこの組み合わせを表として示す。U相電圧、V相電圧、及び、W相電圧を、それぞれ、Vu、Vv、及び、Vwで表した場合において、
Vu>Vv>Vw、が成立する状態を第1モード、
Vv>Vu>Vw、が成立する状態を第2モード、
Vv>Vw>Vu、が成立する状態を第3モード、
Vw>Vv>Vu、が成立する状態を第4モード、
Vw>Vu>Vv、が成立する状態を第5モード、
Vu>Vw>Vv、が成立する状態を第6モード、
と呼ぶと、図4に示した例は第4モードに対応している。また、図5には各モードにおいて検出される電流の相も示されている。
Vu>Vv>Vw、が成立する状態を第1モード、
Vv>Vu>Vw、が成立する状態を第2モード、
Vv>Vw>Vu、が成立する状態を第3モード、
Vw>Vv>Vu、が成立する状態を第4モード、
Vw>Vu>Vv、が成立する状態を第5モード、
Vu>Vw>Vv、が成立する状態を第6モード、
と呼ぶと、図4に示した例は第4モードに対応している。また、図5には各モードにおいて検出される電流の相も示されている。
U相電圧指令値Vu*、V相電圧指令値Vv*、及び、W相電圧指令値Vw*は、具体的には、それぞれカウンタの設定値CntU、CntV、及び、CntWとして表される。相電圧が高いほど大きな設定値が与えられる。例えば、第4モードにおいては、CntW>CntV>CntU、が成立する。
制御部3に設けられたカウンタ(図示せず)は、キャリア周期ごとにタイミングT0を基準としてカウント値を0からアップカウントする。そして、そのカウント値がCntUに達した時点でU相の上アーム8uがオンの状態から下アーム9uがオンの状態に切り替えられ、そのカウント値がCntVに達した時点でV相の上アーム8vがオンの状態から下アーム9vがオンの状態に切り替えられ、そのカウント値がCntWに達した時点でW相の上アーム8wがオンの状態から下アーム9wがオンの状態に切り替えられる。キャリア信号CSが最大レベルに達した後は、カウント値はダウンカウントされ、逆の切り替え動作が行われる。
従って、第4モードにおいては、上記のカウンタ値がCntUに達した時点がタイミングT1に対応し、CntVに達した時点がタイミングT2に対応し、CntWに達した時点がタイミングT3に対応することになる。このため、第4モードにおいては、カウンタ値がアップカウントされている状態で、カウンタ値がCntUより大きく、且つ、CntVより小さいタイミングに電流センサ5の出力信号をサンプリングすることにより母線電流として流れるU相電流(極性は負)を検出することができ、カウンタ値がCntVより大きく、且つ、CntWより小さいタイミングに電流センサ5の出力信号をサンプリングすることにより、母線電流として流れるW相電流(極性は正)を検出することができる。
同様に考えて、図5に示す如く、第2モードにおいては、上記のカウンタ値がCntWに達した時点がタイミングT1に対応し、CntUに達した時点がタイミングT2に対応し、CntVに達した時点がタイミングT3に対応することになる。このため、第2モードにおいては、カウンタ値がアップカウントされている状態で、カウンタ値がCntWより大きく且つCntUより小さいタイミングの母線電流からW相電流(極性は負)を検出することができ、カウンタ値がCntUより大きく且つCntVより小さいタイミングの母線電流からV相電流(極性は正)を検出することができる。第1、第3、第5、第6モードについても同様である。
また、タイミングT1−T2間の、最小相の相電流を検出するサンプリングタイミング(例えば、タイミングT1とT2の中間タイミング)をST1にて表し、タイミングT2−T3間の、最大相の相電流を検出するサンプリングタイミング(例えば、タイミングT2とT3の中間タイミング)をST2にて表す。
尚、三相電圧指令値(Vu*、Vv*、及び、Vw*)としてのカウンタの設定値CntU、CnuV、及び、CntWによって、各相に対するPWM信号のパルス幅(及び、デューティ)は特定される。
上述の原理に基づき母線電流から各相電流を検出することができるのであるが、図4を参照して理解されるように、例えば図4の如く最大相と中間相の電圧レベルが接近すると、タイミングT2−T3間、及び、T4−T5間の時間長さが短くなる。母線電流は図1の電流センサ5からのアナログ出力信号をデジタル信号に変換することによって検出されるが、この時間長さが極端に短いと、必要なA/D変換時間やリンギング(スイッチングに由来して生じる電流脈動)の収束時間を確保できなくなって、最大相の相電流を検出できなくなる。同様に、最小相と中間相の電圧レベルが接近すると、最小相の相電流を検出できなくなる。二相分の電流を実測できなければ、三相分の相電流を再現することはできず、モータ1をベクトル制御することはできない。
本実施形態では、このような二相分の電流を実測できなくなると考えられる期間において、モータ1への印加電圧を表す電圧ベクトル(電圧指令ベクトル)を補正して各相電圧間の電圧レベル差を所定値以上に保ち、これによって上記の不具合を解消する。
この補正手法の詳細な説明の前に、各種の状態量(状態変数)の説明、及び、定義等を行う。図6はモータ1の解析モデル図である。図6にはU相、V相、W相の電機子巻線固定軸(以下、それらを単にU相軸、V相軸、及び、W相軸とも呼ぶ)が示されている。6aは、モータ1の回転子6に設けられた永久磁石である。永久磁石6aが作る磁束と同じ速度で回転する回転座標系において、永久磁石6aが作る磁束の方向をd軸にとる。また、図示していないが、d軸から電気角で90度進んだ位相にq軸をとる。
また、モータ1のベクトル制御を行うに際して回転子位置検出用の位置センサを用いない場合は、真のd軸、及び、q軸が不明であるため、制御上の推定軸が定義される。d軸に対応する制御上の推定軸をγ軸とし、q軸に対応する制御上の推定軸をδ軸とする。δ軸は、γ軸から電気角で90度進んだ軸である(図6において図示せず)。通常ベクトル制御は、γ軸、及び、δ軸がd軸、及び、q軸と一致するように実施される。d軸とq軸は、実軸の回転座標系の座標軸であり、それらを座標軸に選んだ座標をdq座標とよぶ。γ軸とδ軸は、制御上の回転座標系(推定回転座標系)の座標軸であり、それらを座標軸に選んだ座標をγδ座標とよぶ。
d軸(及び、q軸)は回転しており、その回転速度(電気角速度)を実モータ速度ωと呼ぶ。γ軸(及び、δ軸)も回転しており、その回転速度(電気角速度)を推定モータ速度ωeと呼ぶ。また、ある瞬間の回転しているdq座標において、d軸の位相をU相の電機子巻線固定軸を基準としてθ(実回転子位置θ)により表す。同様に、ある瞬間の回転しているγδ座標において、γ軸の位相をU相の電機子巻線固定軸を基準としてθe(推定回転子位置θe)により表すと、d軸とγ軸との軸誤差Δθは、Δθ=θ−θeで表される。
また、インバータ2からモータ1に印加される全体のモータ電圧をVaにて表し、インバータ2からモータ1に供給される全体のモータ電流をIaにて表す。そして、モータ電圧Vaのγ軸成分、δ軸成分、d軸成分、及び、q軸成分を、それぞれγ軸電圧vγ、δ軸電圧vδ、d軸電圧vd、及び、q軸電圧vqで表し、モータ電流Iaのγ軸成分、δ軸成分、d軸成分、及び、q軸成分を、それぞれγ軸電流iγ、δ軸電流iδ、d軸電流id、及び、q軸電流iqで表す。
また、γ軸電圧vγ、δ軸電圧vδ、d軸電圧vd、及び、q軸電圧vqに対する指令値(電圧指令値)を、それぞれγ軸電圧指令値vγ*、δ軸電圧指令値vδ*、d軸電圧指令値vd*、及び、q軸電圧指令値vq*にて表す。γ軸電圧指令値vγ*、δ軸電圧指令値vδ*、d軸電圧指令値vd*、及び、q軸電圧指令値vq*は、モータ駆動システム内において算出され、それぞれ、vγ、vδ、vd、及び、vqが追従すべき電圧(電圧値)を表す。
更にまた、γ軸電流iγ、δ軸電流iδ、d軸電流id、及び、q軸電流iqに対する指令値(電流指令値)を、それぞれγ軸電流指令値iγ*、δ軸電流指令値iδ*、d軸電流指令値id*、及び、q軸電流指令値iq*にて表す。iγ*、iδ*、id*、及び、iq*は、モータ駆動システム内において算出され、それぞれiγ、iδ、id、及び、iqが追従すべき電流(電流値)を表す。
[電圧指令ベクトルの補正]
以下、本実施形態の特徴的な機能である電圧指令ベクトルの補正手法について説明する。図7に固定軸であるU相軸、V相軸、及び、W相軸と、回転軸であるd軸、及び、q軸と、電圧ベクトルとの関係を表す空間ベクトル図を示す。符号110が付されたベクトルが電圧ベクトルである。q軸から見た電圧ベクトル110の位相をδにて表す。U相軸を基準とした電圧ベクトル110の位相は、(θ+δ+π/2)にて表される。
以下、本実施形態の特徴的な機能である電圧指令ベクトルの補正手法について説明する。図7に固定軸であるU相軸、V相軸、及び、W相軸と、回転軸であるd軸、及び、q軸と、電圧ベクトルとの関係を表す空間ベクトル図を示す。符号110が付されたベクトルが電圧ベクトルである。q軸から見た電圧ベクトル110の位相をδにて表す。U相軸を基準とした電圧ベクトル110の位相は、(θ+δ+π/2)にて表される。
電圧ベクトル110は、モータ1に印加される電圧をベクトルとして捉えたものであり、例えばdq座標に着目した場合、電圧ベクトル110のd軸成分、及び、q軸成分は、それぞれvd、及び、vqである。実際にはモータ駆動システム内においてd軸電圧指令値vd*、及び、q軸電圧指令値vq*が算出され、d軸電圧指令値vd*、及び、q軸電圧指令値vq*によって電圧ベクトル110が表される。このため、電圧ベクトルは電圧指令ベクトルとも読み替えられる。
U相軸近傍、V相軸近傍、及び、W相軸近傍の網掛けが施されたアスタリスク状の領域111は、二相分の電流が検出できない領域を表している。例えば、V相電圧とW相電圧が近くて二相分の電流が検出できない場合、電圧ベクトル110はU相軸近傍に位置することになり、U相電圧とW相電圧が近くて二相分の電流が検出できない場合、電圧ベクトル110はV相軸近傍に位置することになる。
このように、二相分の電流が検出不可能な領域111は、U相軸を基準として電気角で60度ごとに存在し、電圧ベクトル110がその領域111に位置すると二相分の電流が検出できない。従って、電圧ベクトルが領域111内にある場合に、電圧ベクトルが領域111外のベクトルとなるように電圧ベクトルを補正してやれば、電流検出が不可能な状態を回避可能となる。
この補正を実行するべく、ここでは二相分の電流を検出不可能な領域111の特性に着目して、電気角60度ごとにステップ的に回転する座標を考える。この座標をab座標と呼ぶ(尚、dq座標やγδ座標は連続的に回転する座標である)。ab座標は、互いに直交するa軸とb軸を座標軸としている。図9にa軸がとり得る六つの軸を示す。a軸は、電圧ベクトル110の位相(θ+δ+π/2)に応じて、a1軸〜a6軸の何れかとなる。a1軸、a3軸、及び、a5軸は、それぞれU相軸、V相軸、及び、W相軸に一致し、a2軸、a4軸、及び、a6軸は、それぞれa1軸とa3軸の中間軸、a3軸とa5軸の中間軸、及び、a5軸とa1軸の中間軸である。尚、符号131が付された円については後述する。
電圧ベクトル110が、符号121が付された範囲に位置する場合、即ち、
11π/6≦(θ+δ+π/2)<0、又は、0≦(θ+δ+π/2)<π/6、
が成立する場合、a軸はa1軸となり、
電圧ベクトル110が、符号122が付された範囲に位置する場合、即ち、
π/6≦(θ+δ+π/2)<π/2、が成立する場合、a軸はa2軸となり、
電圧ベクトル110が、符号123が付された範囲に位置する場合、即ち、
π/2≦(θ+δ+π/2)<5π/6、が成立する場合、a軸はa3軸となり、
電圧ベクトル110が、符号124が付された範囲に位置する場合、即ち、
5π/6≦(θ+δ+π/2)<7π/6、が成立する場合、a軸はa4軸となり、
電圧ベクトル110が、符号125が付された範囲に位置する場合、即ち、
7π/6≦(θ+δ+π/2)<3π/2、が成立する場合、a軸はa5軸となり、
電圧ベクトル110が、符号126が付された範囲に位置する場合、即ち、
3π/2≦(θ+δ+π/2)<11π/6、が成立する場合、a軸はa6軸となる。例えば、電圧ベクトル110が図9に示す位置にある場合、a軸はa4軸となる。
11π/6≦(θ+δ+π/2)<0、又は、0≦(θ+δ+π/2)<π/6、
が成立する場合、a軸はa1軸となり、
電圧ベクトル110が、符号122が付された範囲に位置する場合、即ち、
π/6≦(θ+δ+π/2)<π/2、が成立する場合、a軸はa2軸となり、
電圧ベクトル110が、符号123が付された範囲に位置する場合、即ち、
π/2≦(θ+δ+π/2)<5π/6、が成立する場合、a軸はa3軸となり、
電圧ベクトル110が、符号124が付された範囲に位置する場合、即ち、
5π/6≦(θ+δ+π/2)<7π/6、が成立する場合、a軸はa4軸となり、
電圧ベクトル110が、符号125が付された範囲に位置する場合、即ち、
7π/6≦(θ+δ+π/2)<3π/2、が成立する場合、a軸はa5軸となり、
電圧ベクトル110が、符号126が付された範囲に位置する場合、即ち、
3π/2≦(θ+δ+π/2)<11π/6、が成立する場合、a軸はa6軸となる。例えば、電圧ベクトル110が図9に示す位置にある場合、a軸はa4軸となる。
このように、a軸は電圧ベクトルの回転に伴って、60度ごとにステップ的に回転し、b軸もa軸と直交しつつa軸と共に60度ごとにステップ的に回転する。a軸、及び、b軸は60度ごとに量子化されて60度ごとに回転する座標軸であるとも表現できる。このため、a軸は常に二相分の電流を検出不可能な領域の中心に位置することになる。本補正手法では、dq座標上の電圧ベクトルをab座標上に変換し、そのab座標上に変換された電圧ベクトルのa軸成分、及び、b軸成分を参照して必要に応じてそれらを補正する(例えば、補正によってb軸成分を大きくする)。
[現状の電圧指令ベクトルの補正]
次に、現状における上記補正処理のより具体的な実現方法について説明する。a1軸〜a6軸のうち、電圧ベクトル110が最も近い軸の位相は、U相軸を基準として、「(n+2)π/3」にて表される。ここで、nは、(θ+δ)をπ/3で割った時に得られる商である。便宜上、図9に示す如く、θを上記の位相(n+2)π/3と、その位相(n+2)π/3とθとの差分位相θδとに分解する。これらの位相の関係は、数式1及び式2にて表される。
次に、現状における上記補正処理のより具体的な実現方法について説明する。a1軸〜a6軸のうち、電圧ベクトル110が最も近い軸の位相は、U相軸を基準として、「(n+2)π/3」にて表される。ここで、nは、(θ+δ)をπ/3で割った時に得られる商である。便宜上、図9に示す如く、θを上記の位相(n+2)π/3と、その位相(n+2)π/3とθとの差分位相θδとに分解する。これらの位相の関係は、数式1及び式2にて表される。

dq座標を差分位相θδだけ座標変換することにより、電圧ベクトル110をab座標上における電圧ベクトルとして捉える。ab座標上で考え、電圧ベクトル110のa軸成分、及び、b軸成分をa軸電圧va、及び、b軸電圧vbとすると、d軸電圧vd、及び、q軸電圧vqとa軸電圧va、及び、b軸電圧vbは、下記数式3の座標変換式を満たす。
差分位相θδは、以下のように算出できる。下記数式4を用いて算出されるδに合致するn(即ち、(θ+δ)をπ/3で割った時に得られる商)を、θを参照して求める。その求めたnとθを上記数式2に代入すれば、差分位相θδが得られる。
そして、数式3に従って算出されたa軸電圧va、及び、b軸電圧vbを参照して補正処理を行う。図10にこの補正処理の手順を示すフローチャートを示す。ステップS1では、数式3に従う座標変換が行われる。続くステップS2において、va、及び、vbに対する補正処理が行われる。
ステップS2では、先ずb軸電圧vbの大きさ(絶対値)が所定の閾値Δ(但し、Δ>0)より小さいか否かを判断する。即ち、下記数式5が満たされるか否かを判断する。そして、b軸電圧vbの大きさが閾値Δより小さい場合であって、且つ、b軸電圧vbが正である場合は、vbがΔとなるように補正する。b軸電圧vbの大きさが閾値Δより小さい場合であって、且つ、b軸電圧vbが負である場合は、vbが(−Δ)となるように補正する。b軸電圧vbの大きさが閾値Δ以上の場合、vbに対して補正は施されない。
また、ステップS2において、a軸電圧vaが下記数式6を満たすか否かも判断する。そして、数式6を満たす場合、vaが数式6の右辺と等しくなるようにvaを補正する。vaが下記数式6を満たさない場合、vaに対して補正は施されない。尚、数式6によって、電圧ベクトル110が図8の円131の内部に含まれるかを判断している。電圧ベクトル110が円131の内部に含まれる状態は、三相の相電圧が互いに接近している状態に対応しており、この状態においては、b軸電圧vbの大きさに関わらず二相分の電流は検出できない。
図11に、ステップS2による補正処理の前後の、ab座標上における電圧ベクトル(110)の軌跡を示す。図11(a)は、ab座標上における補正前の電圧ベクトル軌跡を表し、図11(b)は、ab座標上における補正後の電圧ベクトル軌跡を表す。図11(a)及び(b)は、b軸電圧vbが補正される場合を例示している。図11(a)及び(b)のそれぞれに、各タイミングの電圧を表すプロットが多数記されている。図11(a)に対応する補正前の電圧ベクトルは、二相分の電流を検出不可能なa軸近傍にも位置し得るが、図11(b)に対応する補正後の電圧ベクトルは、vbに対する補正によってa軸近傍に位置することがない。
ステップS2による補正処理の後、ステップS3に移行し、補正後の電圧ベクトル110を「位相(n+2)π/3」だけ座標変換する。即ち、ab座標上における補正後の電圧ベクトル110を、αβ座標上の電圧ベクトル110に変換する。αβ座標(αβ固定座標)は、α軸とα軸に直交するβ軸とを座標軸に選んだ固定座標である。図12に示す如く、α軸はU相軸と一致している。電圧ベクトル110のα軸成分、及び、β軸成分をα軸電圧vα、及び、β軸電圧vβとすると、α軸電圧vα、及び、β軸電圧vβと補正後のa軸電圧va、及び、b軸電圧vbは、下記数式7の座標変換式を満たす。
また、補正後のa軸電圧va、及び、b軸電圧vbを、下記数式8に従ってU相電圧Vu、及び、V相電圧Vvに変換することもできる。また、W相電圧Vwは、下記数式9に従って算出される。尚、vaDiffはa軸上の補正量、vbDiffはb軸上の補正量である。
上記の補正処理を経た電圧ベクトルのαβ座標上の軌跡を図13に示す。この補正処理により、固定座標であるαβ座標において、電圧ベクトルが位置しない領域が電気角60度ごとに存在するようになる。また、上記の補正処理を経て得られるvα、及び、vβの電圧波形を、横軸を時間にとり、図14(a)に示す。また、上記の補正処理を経て得られるU相電圧Vu、V相電圧Vv、及び、W相電圧Vwの電圧波形を、横軸を時間にとって図14(b)に示す。図14(b)において、歪んだ正弦波上に並ぶプロット群142uはU相電圧Vuの軌跡を、歪んだ正弦波上に並ぶプロット群142vはV相電圧Vvの軌跡を、歪んだ正弦波上に並ぶプロット群142wはW相電圧Vwの軌跡を表す。図14(b)からも分かるように、上記の補正処理によって各相電圧間の電圧差が所定値以上確保されている。
このように、本補正手法では、dq座標から固定座標(例えば、αβ座標)へ座標変換する際、ab座標を介して二段階の座標変換を行うようにする。そして、補正のしやすいab座標上において電圧ベクトルに対する補正処理を実行することで、必要な補正を簡素に、且つ、確実に実現する。ab座標において、電圧ベクトル(電圧指令ベクトル)の座標軸成分va、及び、vbを独立して補正するだけで済むため、補正内容が簡素である。特に、印加電圧が低い時には三相全てに対して補正が必要となるが、このような場合にも補正量の決定が容易である。
尚、この2段階の座標変換と、dq座標とαβ座標との座標変換(通常の一段階の座標変換)とが等価であること、即ち下記数式10が成立することは、上記数式2より明らかである。
[本発明の電圧指令ベクトルの補正]
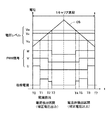
前記特許文献1では、電圧指令ベクトルの補正を図15に示す如くキャリア信号CSの1キャリア周期内における電流検出区間、即ち、前記サンプリングタイミングST1が存在するタイミングT1ーT2間、及び、サンプリングタイミングST2が存在するタイミングT2−T3間に加えて、電流を検出する必要の無い電流非検出区間、即ち、タイミングT5ーT6間、及び、タイミングT4−T5間においても行っていた。確かに、係る補正によって図4に比較して最大相(Vw)と中間相(Vv)の電圧レベルは離れ、タイミングT2−T3間、及び、T4−T5間の時間長さが拡大されて相電流の検出不能を回避することができるようになっている。
前記特許文献1では、電圧指令ベクトルの補正を図15に示す如くキャリア信号CSの1キャリア周期内における電流検出区間、即ち、前記サンプリングタイミングST1が存在するタイミングT1ーT2間、及び、サンプリングタイミングST2が存在するタイミングT2−T3間に加えて、電流を検出する必要の無い電流非検出区間、即ち、タイミングT5ーT6間、及び、タイミングT4−T5間においても行っていた。確かに、係る補正によって図4に比較して最大相(Vw)と中間相(Vv)の電圧レベルは離れ、タイミングT2−T3間、及び、T4−T5間の時間長さが拡大されて相電流の検出不能を回避することができるようになっている。
しかしながら、図7等の電圧ベクトル110が領域111外に位置するようにvbに対して補正を行うことにより、図14(b)に示す如く各相電圧が不連続となってしまう。図16にこの不連続部分における電圧(例えば、W相電圧Vw)の様子を示す。この不連続性は、モータ1の滑らかな駆動にとって望ましいものではない。特に、モータ1の起動時や低負荷時には、電圧指令値も低いので、図15のように補正を行った場合、印加するべき電圧からずれてモータが起動できなくなる。
そこで、本発明ではキャリア信号CSの1キャリア周期内において、電流を検出する必要の無い電流非検出区間、即ち、図15のタイミングT5ーT6間、及び、タイミングT4−T5間においては、電流検出区間、即ち、タイミングT1ーT2間、及び、タイミングT2−T3間において行った電圧指令ベクトルの補正を打ち消す逆の補正(逆補正と称す)を施す。
下記数式11、及び、数式12にこの場合の逆補正の様子をU相電圧VuとV相電圧Vvで表す。尚、数式11は前記電流検出区間における補正の数式8に対応し、数式12は数式9に対応する。また、−vaDiffはこの場合の逆補正におけるa軸上の補正量、−vbDiffはb軸上の補正量である。
図7にこの逆補正のベクトルを示す。また、図17に本発明で電流非検出区間において逆補正を行った場合の電圧レベル等を示す。この逆補正によりタイミングT4−T5間の最大相と中間相の電圧レベルは再び接近することになるが、この区間は電流を検出する必要が無いので問題は無い。そして、このような補正とその補正を打ち消す逆補正を1キャリア周期内において行うことで、図18に示すように図16における電圧の不連続部分で電圧の不連続性を緩和することができる。また、数式11等の座標変換の計算では、電流検出区間と電流非検出区間とも同じなので、計算量が増大することも無い。
以下に、このような補正処理(補正手法)を適用した実施例を示す。図19は実施例としてのモータ駆動システムの全体構成ブロック図である。尚、図19において図1と同一の部分には同一の符号を付す。
図19のモータ駆動システムは、モータ1、インバータ2、直流電源4及び電流センサ5を備えていると共に、図1の制御部3を形成する「電流検出部21、座標変換部22、電圧変換部23、電圧ベクトル補正部24、座標変換部25、位置センサ27、位置検出部28、及び、微分器29」を備えている。
位置センサ27は、ロータリエンコーダ等であり、モータ1の回転子6の実回転子位置θ(位相)に応じた信号を位置検出部28に送る。位置検出部28は、位置センサ27の出力信号に基づいて実回転子位置θを検出する。微分器29は、その実回転子位置θを微分することにより、実モータ速度ωを算出して出力する。
上述の如く、電流センサ5は母線電流を検出し、この母線電流の電流値を表す信号を出力する。母線電流をidcにて表す。電流検出部21は、座標変換部25が出力する三相電圧指令値Vu*、Vv*、及び、Vw*を参照して、何れの相が最大相、中間相及び最小相であるかを特定すると共に、電流センサ5の出力信号をサンプリングするタイミングST1、及び、ST2(図5参照)を決定し、そのタイミングにおいて得た母線電流の電流値からU相電流iu、及び、V相電流ivを算出、及び、出力する。この際、必要に応じて、iu+iv+iw=0の関係式を用いる(iwはW相電流を表す)。
座標変換部22は、実回転子位置θに基づいてU相電流iu、及び、V相電流ivをd軸電流id、及び、q軸電流iqに変換して出力する。
電圧変換部(電圧指令ベクトル作成手段)23には、外部からモータ1(回転子6)を所望の速度で回転させるための指令値としてモータ速度指令値ω*が与えられる。また、電圧変換部23には、微分器29から実モータ速度ωが与えられ、座標変換部22からd軸電流id、及び、q軸電流iqが与えられる。電圧変換部23は、速度誤差(ω*−ω)に基づいて、q軸電流iqが追従すべきq軸電流指令値iq*を算出する。例えば、比例積分制御によって(ω*−ω)が零に収束するようにiq*を算出する。更に、電圧変換部23は、iq*を参照してd軸電流idが追従すべきd軸電流指令値id*を算出する。例えば、最大トルク制御を実現するためのid*を算出する。そして、電圧変換部23は、電流誤差(id*−id)、及び、(iq*−iq)が零に収束するように比例積分制御を行って、d軸電圧vdが追従すべきd軸電圧指令値vd*、及び、q軸電圧vqが追従すべきq軸電圧指令値vq*を算出及び出力する。
電圧ベクトル補正部(電圧指令ベクトル補正手段)24は、d軸電圧指令値vd*、及び、q軸電圧指令値vq*、並びに実回転子位置θに基づき、d軸電圧指令値vd*、及び、q軸電圧指令値vq*を座標変換を介して補正しつつ、α軸電圧vαが追従すべきα軸電圧指令値vα*、及び、β軸電圧vβが追従すべきβ軸電圧指令値vβ*を算出して出力する。その補正の際、前述したキャリア信号CSの1キャリア周期内における電流検出区間では前述の補正を行い、電流非検出区間ではそれを打ち消す逆補正を行う。
そして、座標変換部(三相電圧指令値作成手段)25は、実回転子位置θに基づいてα軸電圧指令値vα*、及び、β軸電圧指令値vβ*を三相電圧指令値(Vu*、Vv*、及び、Vw*)に変換し、該三相電圧指令値をインバータ2に出力する。インバータ2は、該三相電圧指令値に従って、上述の如く三相交流電流をモータ1に供給する。
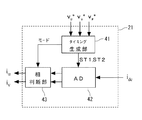
図20に、電流検出部21の内部ブロック図を示す。電流検出部21の動作の説明に、図5も参照される。電流検出部21は、タイミング生成部41と、AD変換器42と、相判断部43とを有する。図5を参照して説明したように、U相電圧指令値Vu*、V相電圧指令値Vv*、及び、W相電圧指令値Vw*は、それぞれ、カウンタの設定値CntU、CntV、及び、CntWとして表される。タイミング生成部41は、U相電圧指令値Vu*、V相電圧指令値Vv*、及び、W相電圧指令値Vw*に基づき、カウンタの設定値CntU、CntV、及び、CntWの大小関係を判断して現時点が第1〜第6モードの何れに属するかを特定すると共に、特定されたモードを考慮して母線電流を検出すべきタイミングST1、及び、ST2を決定する。例えば、「CntU>CntV>CntW」である場合、現時点は第1モードに属すると判断し、設定値CntWとCntVの間に対応するタイミングをST1、設定値CntVとCntUの間に対応するタイミングをST2と定める。
以下、現時点が属するモードを表す情報を、「モード情報」と呼ぶ。AD変換器42は、タイミングST1とST2のそれぞれにおいて電流センサ5の出力信号(アナログ出力信号)をサンプリングすることにより、タイミングST1とST2のそれぞれにおける母線電流idcの電流値をデジタル値として検出、及び、出力する。相判断部43は、タイミング生成部41にて特定されたモード情報を参照して、AD変換器42の出力信号からiu、及び、ivを算出する。例えば、モード情報が第1モードを表す場合、タイミングST1、及び、ST2にて検出される母線電流は、それぞれ(−iw)、及び、iuである。iu+iv+iw=0の関係式を用いれば、ivを算出可能である。
図21に、電圧ベクトル補正部24の内部ブロック図を示す。電圧ベクトル補正部24は、座標回転部51及び53と、成分補正部52と、を有する。電圧ベクトル補正部24では、上記数式3及び数式4におけるvd、及び、vqとしてvd*、及び、vq*が用いられる。
座標回転部51は、vd*、及び、vq*、並びに、θに基づき、上記数式3に従って、vd*、及び、vq*を、va、及び、vbに変換する。つまり、vd*、及び、vq*によって表されるdq座標上の二相の電圧指令ベクトルを、va、及び、vbによって表されるab座標上の二相の電圧指令ベクトルに変換する(これらの電圧指令ベクトルは、図7の電圧ベクトル110に相当する)。
数式3に基づく演算を実施する上で差分位相θδが必要となるが、差分位相θδは数式4を参照して上述した手法を用いて算出される。また、差分位相θδを算出する際に座標回転部51にて求められたnは、座標回転部53での演算に利用される。
成分補正部52は、図10のステップS2における補正処理、及び、図17に示す逆補正処理をva、及び、vbに対して施し、電流検出区間において補正後のva、及び、vbを、それぞれvac1、及び、vbc1として出力し、電流非検出区間においては逆補正後のva、及び、vbを、それぞれvac2、vbc2として出力する。但し、補正が不要の場合は、vac=va、且つ、vbc=vbとなる。即ち、この発明における補正電圧指令ベクトルと逆補正電圧指令ベクトルの演算は、この成分補正部52にて行われる。
本発明における補正電圧指令ベクトルは、va+vaDiff、vb+vbDiffで表される前記数式8の右端の括弧に相当する。また、本発明における逆補正電圧指令ベクトルは、va−vaDiff、vb−vbDiffで表される前記数式11の右端の括弧に相当する。そして、本発明における補正ベクトルが前記数式8、数式11中のvaDiff、vbDiffに相当する。以後、電流検出区間用の指令値(補正電圧指令ベクトル)と、電流非検出区間用の指令値(逆補正電圧指令ベクトル)との二つを順次座標変換して、最終的にU、V、W相の電圧指令値にするものである。
座標回転部53は、上記数式7に従って電流検出区間における補正後のa軸電圧、及び、b軸電圧(即ち、vac1、及び、vbc1)をvα1*、及び、vβ1*に変換する。つまりvac1、及び、vbc1によって表されるab座標上の二相の電圧指令ベクトルを、vα1*、及び、vβ1*によって表されるαβ座標(αβ固定座標)上の二相の電圧指令ベクトル(補正電圧指令ベクトル)に変換する。この際、数式7におけるva、vb、vα、及び、vβとして、それぞれvac1、vbc1、vα1*、及び、vβ1*が用いられる。
また、座標回転部53は、上記数式7に従って電流非検出区間における逆補正後のa軸電圧、及び、b軸電圧(即ち、vac2、及び、vbc2)をvα2*、及び、vβ2*に変換する。つまりvac2、及び、vbc2によって表されるab座標上の二相の電圧指令ベクトルを、vα2*、及び、vβ2*によって表されるαβ座標(αβ固定座標)上の二相の電圧指令ベクトル(逆補正電圧指令ベクトル)に変換する。この際、数式7におけるva、vb、vα、及び、vβとして、それぞれvac2、vbc2、vα2*、及び、vβ2*が用いられる。
この実施例では、Vu*、Vv*、及び、Vw*の大小関係に基づいて現時点が属するモードを特定することにより、タイミングST1、及び、ST2において母線電流として母線13(図1参照)に流れる電流の相を判断する。そして、その判断結果(即ち、モード情報)に従って、Vu*、Vv*、及び、Vw*からタイミングST1、及び、ST2を決定している。
尚、上記実施例では、ベクトル制御の制御周期と、PWMのキャリア周期が同じ場合に適応したが、ベクトル制御の制御周期が複数のキャリア周期に跨る場合に適応しても良い。例えば、図23のような場合は、電流検出期間を1とした場合に、電流非検出区間は3となるので、逆補正電圧指令ベクトルを作成する際に電圧指令ベクトルから減算した補正ベクトルの値に1/3(電流検出区間の長さ/電流非検出区間の長さ)を乗算した値を減算すると良い。
また、上記実施例ではab座標上で補正電圧指令ベクトルと逆補正電圧指令ベクトルを導出するようにしたが、それに限らず、電圧指令ベクトルと補正電圧指令ベクトルを求めて、U、V、W相の電圧指令値にし、電圧指令ベクトルに対するU、V、W相の電圧指令値と補正電圧指令ベクトルに対するU、V、W相の電圧指令値との差を算出し、算出した差を電圧指令ベクトルに対するU、V、W相の電圧指令値に加算し、補正電圧指令ベクトルに対するU、V、W相の電圧指令値を電流検出区間に、この加算が成された電圧指令値を電流非検出区間に用いるようにしても良い。即ち、U、V、W相の電圧指令に対して逆補正の演算を行うようにしても良い。
また、上記実施例ではモータ駆動システムに本発明のインバータ制御装置を適用したが、それに限らず、直流電源からの直流電圧をインバータによって三相の交流電圧に変換し、外部の三相交流電力系統に連系しつつ交流電圧に基づく交流電力を負荷に供給する系統連系装置に本発明のインバータ制御装置を採用しても良い。
1 モータ
2 インバータ
3 制御部
4 直流電源
5 電流センサ
6 回転子
7 固定子
7u、7v、7w 電機子巻線
21 電流検出部
23 電圧変換部
24 電圧ベクトル補正部
2 インバータ
3 制御部
4 直流電源
5 電流センサ
6 回転子
7 固定子
7u、7v、7w 電機子巻線
21 電流検出部
23 電圧変換部
24 電圧ベクトル補正部
Claims (4)
- キャリア信号のキャリア周期内における電流検出区間において、三相式のインバータと直流電源との間に流れる電流を検出電流として検出する電流検出手段を備え、検出された前記検出電流から前記インバータの三相電流を検出し、該三相電流に基づいて前記インバータを制御するインバータ制御装置において、
前記インバータの三相電圧が追従すべき電圧のベクトルであって、前記三相の各相電圧の合成電圧のベクトルからなる電圧指令ベクトルを作成する電圧指令ベクトル作成手段と、
作成された前記電圧指令ベクトルを補正する電圧指令ベクトル補正手段とを備え、
補正後の前記電圧指令ベクトルに従って前記インバータを制御すると共に、
前記電圧指令ベクトル補正手段は、当該電圧指令ベクトル補正手段によって補正された後の前記電圧指令ベクトルが、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるように補正し、前記キャリア周期内の電流非検出区間においては、前記電流検出区間における補正を打ち消す逆補正を行うことを特徴とするインバータ制御装置。 - 前記電圧指令ベクトル補正手段は、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるよう、前記電圧指令ベクトルに補正ベクトルを加えて補正した補正電圧指令ベクトルと、
前記電圧指令ベクトルから前記補正ベクトルを減算した逆補正電圧指令ベクトルとを導出し、
前記電流検出区間においては、前記補正電圧指令ベクトルに従って前記インバータを制御し、前記電流非検出区間においては、前記逆補正電圧指令ベクトルに従って前記インバータを制御することを特徴とする請求項1に記載のインバータ制御装置。 - 前記電圧指令ベクトルは、所定の固定軸を基準とした前記電圧指令ベクトルの位相に応じて電気角60度ごとにステップ的に回転するab座標上の二相の電圧指令ベクトルであり、
前記電圧指令ベクトル補正手段による前記補正電圧指令ベクトル、及び、前記逆補正電圧指令ベクトルは、ab座標上において導出されることを特徴とする請求項1又は請求項2に記載のインバータ制御装置。 - 前記電流検出区間は、前記キャリア周期の前半の周期であることを特徴とする請求項1乃至請求項3のうちの何れかに記載のインバータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011040298A JP2012178927A (ja) | 2011-02-25 | 2011-02-25 | インバータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011040298A JP2012178927A (ja) | 2011-02-25 | 2011-02-25 | インバータ制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012178927A true JP2012178927A (ja) | 2012-09-13 |
Family
ID=46980403
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011040298A Withdrawn JP2012178927A (ja) | 2011-02-25 | 2011-02-25 | インバータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012178927A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015142444A (ja) * | 2014-01-29 | 2015-08-03 | ダイヤモンド電機株式会社 | Pwm信号制御装置 |
| JP2016010278A (ja) * | 2014-06-26 | 2016-01-18 | 富士電機株式会社 | インバータの制御装置 |
| WO2016098410A1 (ja) * | 2014-12-15 | 2016-06-23 | 日立オートモティブシステムズ株式会社 | 電力変換装置及びこれを用いた電動パワーステアリング装置 |
| WO2016117067A1 (ja) * | 2015-01-22 | 2016-07-28 | 三菱電機株式会社 | 交流回転機の制御装置および電動パワーステアリングの制御装置 |
| WO2016117047A1 (ja) * | 2015-01-21 | 2016-07-28 | 三菱電機株式会社 | 交流回転機の制御装置および電動パワーステアリングの制御装置 |
| WO2017141539A1 (ja) * | 2016-02-18 | 2017-08-24 | 三菱電機株式会社 | インバータ制御装置 |
| WO2017208652A1 (ja) * | 2016-06-03 | 2017-12-07 | 日立オートモティブシステムズ株式会社 | モータ制御装置 |
| JP2019140809A (ja) * | 2018-02-13 | 2019-08-22 | パナソニックIpマネジメント株式会社 | インバータ制御装置 |
-
2011
- 2011-02-25 JP JP2011040298A patent/JP2012178927A/ja not_active Withdrawn
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015142444A (ja) * | 2014-01-29 | 2015-08-03 | ダイヤモンド電機株式会社 | Pwm信号制御装置 |
| JP2016010278A (ja) * | 2014-06-26 | 2016-01-18 | 富士電機株式会社 | インバータの制御装置 |
| WO2016098410A1 (ja) * | 2014-12-15 | 2016-06-23 | 日立オートモティブシステムズ株式会社 | 電力変換装置及びこれを用いた電動パワーステアリング装置 |
| CN107112941B (zh) * | 2014-12-15 | 2019-07-23 | 日立汽车系统株式会社 | 电力转换装置以及使用该电力转换装置的电力转向装置 |
| US10348218B2 (en) | 2014-12-15 | 2019-07-09 | Hitachi Automotive Systems, Ltd. | Power conversion device and electric power steering device using the same |
| JPWO2016098410A1 (ja) * | 2014-12-15 | 2017-05-18 | 日立オートモティブシステムズ株式会社 | 電力変換装置及びこれを用いた電動パワーステアリング装置 |
| CN107112941A (zh) * | 2014-12-15 | 2017-08-29 | 日立汽车系统株式会社 | 电力转换装置以及使用该电力转换装置的电力转向装置 |
| WO2016117047A1 (ja) * | 2015-01-21 | 2016-07-28 | 三菱電機株式会社 | 交流回転機の制御装置および電動パワーステアリングの制御装置 |
| JPWO2016117047A1 (ja) * | 2015-01-21 | 2017-04-27 | 三菱電機株式会社 | 交流回転機の制御装置および電動パワーステアリングの制御装置 |
| US9923504B2 (en) | 2015-01-21 | 2018-03-20 | Mitsubishi Electric Corporation | Control device for AC rotary machine and control device for electric power steering |
| CN107210699A (zh) * | 2015-01-22 | 2017-09-26 | 三菱电机株式会社 | 交流旋转电机的控制装置及电动助力转向的控制装置 |
| US10158315B2 (en) | 2015-01-22 | 2018-12-18 | Mitsubishi Electric Corporation | Controller for AC rotating machine and controller for electric power steering |
| JPWO2016117067A1 (ja) * | 2015-01-22 | 2017-04-27 | 三菱電機株式会社 | 交流回転機の制御装置および電動パワーステアリングの制御装置 |
| WO2016117067A1 (ja) * | 2015-01-22 | 2016-07-28 | 三菱電機株式会社 | 交流回転機の制御装置および電動パワーステアリングの制御装置 |
| CN107210699B (zh) * | 2015-01-22 | 2019-08-27 | 三菱电机株式会社 | 交流旋转电机的控制装置及电动助力转向的控制装置 |
| WO2017141539A1 (ja) * | 2016-02-18 | 2017-08-24 | 三菱電機株式会社 | インバータ制御装置 |
| JPWO2017141539A1 (ja) * | 2016-02-18 | 2018-04-26 | 三菱電機株式会社 | インバータ制御装置 |
| WO2017208652A1 (ja) * | 2016-06-03 | 2017-12-07 | 日立オートモティブシステムズ株式会社 | モータ制御装置 |
| JPWO2017208652A1 (ja) * | 2016-06-03 | 2019-03-28 | 日立オートモティブシステムズ株式会社 | モータ制御装置 |
| JP2019140809A (ja) * | 2018-02-13 | 2019-08-22 | パナソニックIpマネジメント株式会社 | インバータ制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4429338B2 (ja) | モータ制御装置、電流検出ユニット | |
| JP4961292B2 (ja) | モータ制御装置 | |
| JP4988374B2 (ja) | モータ制御装置 | |
| US7952309B2 (en) | Rotating electrical machine control device | |
| JP4956123B2 (ja) | モータ制御装置 | |
| JP5311864B2 (ja) | モータ制御装置 | |
| US8040096B2 (en) | Rotary electric system with star-connected multiphase stator windings | |
| JP2012178927A (ja) | インバータ制御装置 | |
| US8040086B2 (en) | Current detector unit and motor control device | |
| JP2008067556A (ja) | モータ制御装置 | |
| JPWO2012157039A1 (ja) | 同期電動機の駆動システム | |
| JP2010011540A (ja) | モータ制御装置 | |
| US10608572B2 (en) | Motor drive control device | |
| JP6129972B2 (ja) | 交流電動機の制御装置、交流電動機駆動システム、流体圧制御システム、位置決めシステム | |
| JP2010068581A (ja) | 電動機駆動装置 | |
| JP2012138982A (ja) | モータ制御装置及び電気機器 | |
| JP2019146360A (ja) | インバータ制御装置 | |
| CN111034013B (zh) | 三相同步电动机的控制装置和使用其的电动助力转向装置 | |
| WO2020105106A1 (ja) | 交流回転電機の制御装置 | |
| JP7385776B2 (ja) | 電動機の制御装置 | |
| JP2020031469A (ja) | モータ駆動制御装置 | |
| JP6827182B2 (ja) | インバータ制御装置 | |
| JP4628942B2 (ja) | 電動機の制御装置 | |
| JP2019083676A (ja) | モータ駆動制御装置 | |
| CN114762239A (zh) | 电力变换装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140513 |