JP2012082644A - 建設機械 - Google Patents
建設機械 Download PDFInfo
- Publication number
- JP2012082644A JP2012082644A JP2010231086A JP2010231086A JP2012082644A JP 2012082644 A JP2012082644 A JP 2012082644A JP 2010231086 A JP2010231086 A JP 2010231086A JP 2010231086 A JP2010231086 A JP 2010231086A JP 2012082644 A JP2012082644 A JP 2012082644A
- Authority
- JP
- Japan
- Prior art keywords
- capacitor
- motor
- construction machine
- power
- target voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
- E02F9/10—Supports for movable superstructures mounted on travelling or walking gears or on other superstructures
- E02F9/12—Slewing or traversing gears
- E02F9/121—Turntables, i.e. structure rotatable about 360°
- E02F9/123—Drives or control devices specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/16—Dynamic electric regenerative braking for vehicles comprising converters between the power source and the motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/34—Parallel operation in networks using both storage and other dc sources, e.g. providing buffering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/07572—Propulsion arrangements
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/425—Drive systems for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2091—Control of energy storage means for electrical energy, e.g. battery or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/40—Working vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/10—DC to DC converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/54—Energy consumption estimation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Operation Control Of Excavators (AREA)
Abstract
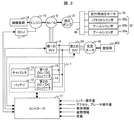
【解決手段】予め作業機械の状態を把握しエネルギを算出して、次の動作を予測し、キャパシタに充電するエネルギ量を決定し、それに伴いDC/DCコンバータを制御する。これにより、従来のバッテリ(鉛蓄電池)における回生時の損失を減らすことが可能となり、効率が向上する。
【効果】本発明によれば、回生エネルギを高効率で回収でき、バッテリやキャパシタの寿命を悪化させることなく、効率向上が可能となる。
【選択図】 図2
Description
Ev1=(1/2)・I1・ωm2 …(1)
Ev2=K2・(1/2)・I2・ωe2 …(2)
Ep=K3・St …(3)
により算出できる。
Vc *=V0−E′ …(4)
E′=(Kp・Ep+Kv・Ev) …(5)
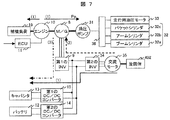
8 モータジェネレータ(M/G)
9 第1のインバータ
10 エンジン
12 バッテリ
13 キャパシタ
14 第2のDC/DCコンバータ
15 第1のDC/DCコンバータ
17 コントローラ
32 フロント作業装置
33 走行用油圧モータ
34 第2のインバータ
35 交流モータ
36 コントロールバルブ
400 作業部
402 旋回体
Claims (8)
- エンジンと、前記エンジンによって駆動する油圧ポンプと、前記エンジンと前記油圧ポンプとに連結する発電可能なモータジェネレータと、前記油圧ポンプから吐出する油によって駆動する油圧作業装置と、前記油圧作業装置が設置される旋回体と、前記旋回体を駆動する交流モータと、前記モータジェネレータおよび/または前記交流モータに電力を供給、ならびに、前記モータジェネレータおよび/または前記交流モータから回生される電力を充電するキャパシタを有する電源システムと、前記電源システムを制御するコントローラと、を有する建設機械において、
前記コントローラは、オペレータの現操作に基づいて、前記油圧作業装置および/または前記旋回体の次動作を推定する動作推定部と、推定された次動作に基づいて、前記モータジェネレータおよび/または前記交流モータから回生される電力量を算出するエネルギ算出部と、算出された電力量に基づいて、前記キャパシタの目標電圧を設定するキャパシタ制御部と、を有することを特徴とする建設機械。 - 請求項1に記載の建設機械において、
前記キャパシタ制御部は、前記キャパシタの現電圧を検出するキャパシタ状態検出部と、算出された電力量と検出された現電圧とに基づいて、前記キャパシタに対する充放電指令を算出するキャパシタ充放電指令算出部と、作成された充放電指令に基づいて、前記キャパシタの目標電圧を設定するキャパシタ目標電圧設定部と、を有することを特徴とする建設機械。 - 請求項1に記載の建設機械において、
前記キャパシタ制御部は、前記エンジンの回転数、前記交流モータのトルク指令、および/または、前記モータジェネレータのトルク指令に基づいて、前記キャパシタの目標電圧を補正することを特徴とする建設機械。 - 請求項1に記載の建設機械において、
前記コントローラは、オペレータの現操作に応じて前記旋回体から要求される電力量を算出する車体制御部を有することを特徴とする建設機械。 - エンジンと油圧ポンプとに連結する発電可能なモータジェネレータおよび/または前記油圧ポンプから吐出する油によって駆動する油圧作業装置が設置される旋回体を駆動する交流モータ、に電力を供給する、ならびに、前記モータジェネレータおよび/または前記交流モータから回生される電力を充電する、キャパシタを有する電源システムと、前記電源システムを制御するコントローラと、を有する建設機械において、
前記コントローラは、オペレータの現操作に基づいて、前記油圧作業装置および/または前記旋回体の次動作を推定し、推定された次動作に基づいて、前記モータジェネレータおよび/または前記交流モータから回生される電力量を算出し、算出された電力量に基づいて、前記キャパシタの目標電圧を設定することを特徴とする建設機械。 - 請求項5に記載の建設機械において、
前記コントローラは、算出された電力量に基づいて、前記キャパシタに対する充放電指令を作成し、作成された充放電指令に基づいて、前記キャパシタの目標電圧を設定することを特徴とする建設機械。 - 請求項5に記載の建設機械において、
前記コントローラは、前記交流モータの回転速度に基づいて、電力量を算出することを特徴とする建設機械。 - 請求項5に記載の建設機械において、
前記コントローラは、キャパシタの現電圧と前記キャパシタの目標電圧とを比較し、前記キャパシタの現電圧が前記キャパシタの目標電圧より大きい場合には、前記旋回体を駆動する交流モータに、予め、前記キャパシタに充電されている電力を供給することを特徴とする建設機械。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010231086A JP2012082644A (ja) | 2010-10-14 | 2010-10-14 | 建設機械 |
| US13/878,822 US20140147238A1 (en) | 2010-10-14 | 2011-10-04 | Construction machine |
| KR1020137007950A KR20140009129A (ko) | 2010-10-14 | 2011-10-04 | 건설 기계 |
| CN2011800496393A CN103154388A (zh) | 2010-10-14 | 2011-10-04 | 工程机械 |
| EP11832446.6A EP2628857A1 (en) | 2010-10-14 | 2011-10-04 | Construction machine |
| PCT/JP2011/072892 WO2012050010A1 (ja) | 2010-10-14 | 2011-10-04 | 建設機械 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010231086A JP2012082644A (ja) | 2010-10-14 | 2010-10-14 | 建設機械 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012082644A true JP2012082644A (ja) | 2012-04-26 |
| JP2012082644A5 JP2012082644A5 (ja) | 2013-05-02 |
Family
ID=45938239
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010231086A Pending JP2012082644A (ja) | 2010-10-14 | 2010-10-14 | 建設機械 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20140147238A1 (ja) |
| EP (1) | EP2628857A1 (ja) |
| JP (1) | JP2012082644A (ja) |
| KR (1) | KR20140009129A (ja) |
| CN (1) | CN103154388A (ja) |
| WO (1) | WO2012050010A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103342124A (zh) * | 2013-07-25 | 2013-10-09 | 潍柴动力股份有限公司 | 一种取力器取力的控制方法及装置 |
| JP2014087115A (ja) * | 2012-10-22 | 2014-05-12 | Kobe Steel Ltd | 建設機械用2次電池保護回路 |
| JP2014198970A (ja) * | 2013-03-29 | 2014-10-23 | 住友重機械工業株式会社 | ショベル |
| JP2015529293A (ja) * | 2012-09-21 | 2015-10-05 | ハーニッシュフェガー テクノロジーズ インコーポレーテッド | 予測可能な作業サイクルを遂行する機械類のためのエネルギー管理システム |
| JP2016132968A (ja) * | 2015-01-22 | 2016-07-25 | 日立建機株式会社 | ハイブリッド建設機械 |
| WO2024075650A1 (ja) * | 2022-10-06 | 2024-04-11 | 日立建機株式会社 | 作業機械 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5226733B2 (ja) * | 2010-05-20 | 2013-07-03 | 株式会社小松製作所 | ハイブリッド建設機械およびハイブリッド建設機械の蓄電器容量計測方法 |
| JP5580914B1 (ja) * | 2013-03-22 | 2014-08-27 | トヨタ自動車株式会社 | 電源制御装置 |
| JP6324072B2 (ja) * | 2014-01-07 | 2018-05-16 | 株式会社Kcm | ハイブリッド式ホイールローダ |
| JP6557472B2 (ja) * | 2015-01-06 | 2019-08-07 | 川崎重工業株式会社 | 作業機械の駆動制御システム、それを備える作業機械、及びその駆動制御方法 |
| JP6708969B2 (ja) * | 2016-12-08 | 2020-06-10 | コベルコ建機株式会社 | 旋回制御装置 |
| WO2018176041A1 (en) * | 2017-03-24 | 2018-09-27 | Sturman Digital Systems, Llc | Multiple engine block and multiple engine internal combustion power plants for both stationary and mobile applications |
| JP6961548B2 (ja) * | 2018-07-19 | 2021-11-05 | 日立建機株式会社 | 建設機械 |
| KR102402509B1 (ko) * | 2018-09-28 | 2022-05-30 | 가부시키가이샤 히다치 겡키 티에라 | 전동식 건설 기계 |
| JP7283910B2 (ja) * | 2019-02-01 | 2023-05-30 | 株式会社小松製作所 | 建設機械の制御システム、建設機械、及び建設機械の制御方法 |
| CN111022440A (zh) * | 2019-11-27 | 2020-04-17 | 上海中船三井造船柴油机有限公司 | 用于数控机床液压系统的余能转换再利用装置 |
| CN113958550A (zh) * | 2021-11-03 | 2022-01-21 | 北京时代龙博科技有限公司 | 工程抢险集成车 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010114036A1 (ja) * | 2009-03-31 | 2010-10-07 | 日立建機株式会社 | 電源システムを備えた建設機械及び産業車両 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09224302A (ja) | 1996-02-19 | 1997-08-26 | Aqueous Res:Kk | ハイブリッド車両 |
| JP3709654B2 (ja) * | 1997-05-21 | 2005-10-26 | 日立建機株式会社 | 掘削手段を備えた土質改良機械 |
| JPH11164402A (ja) | 1997-11-28 | 1999-06-18 | Aisin Aw Co Ltd | ハイブリッド車両の制御装置及び制御方法 |
| JP2002359935A (ja) | 2001-05-31 | 2002-12-13 | Komatsu Ltd | ハイブリッド作業機械の蓄電部充放電制御装置 |
| US7869923B2 (en) * | 2004-09-24 | 2011-01-11 | Komatsu Ltd. | Slewing controller, slewing control method, and construction machine |
| US8207708B2 (en) * | 2007-03-23 | 2012-06-26 | Komatsu Ltd. | Power generation control method of hybrid construction machine and hybrid construction machine |
| WO2009001587A1 (ja) * | 2007-06-26 | 2008-12-31 | Hitachi Construction Machinery Co., Ltd. | 自走式建設機械 |
| JP5096813B2 (ja) * | 2007-07-03 | 2012-12-12 | 日立建機株式会社 | 建設機械のエンジン制御装置 |
| JP5085734B2 (ja) * | 2008-06-27 | 2012-11-28 | 住友重機械工業株式会社 | ハイブリッド式建設機械 |
| JP5079725B2 (ja) * | 2009-03-05 | 2012-11-21 | 住友重機械工業株式会社 | 作業機械 |
| JP5116787B2 (ja) * | 2009-03-05 | 2013-01-09 | 住友重機械工業株式会社 | ハイブリッド型作業機械 |
| JP5228000B2 (ja) * | 2010-05-26 | 2013-07-03 | 日立建機株式会社 | ハイブリッド式建設機械 |
-
2010
- 2010-10-14 JP JP2010231086A patent/JP2012082644A/ja active Pending
-
2011
- 2011-10-04 EP EP11832446.6A patent/EP2628857A1/en not_active Withdrawn
- 2011-10-04 WO PCT/JP2011/072892 patent/WO2012050010A1/ja active Application Filing
- 2011-10-04 CN CN2011800496393A patent/CN103154388A/zh active Pending
- 2011-10-04 KR KR1020137007950A patent/KR20140009129A/ko not_active Application Discontinuation
- 2011-10-04 US US13/878,822 patent/US20140147238A1/en not_active Abandoned
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010114036A1 (ja) * | 2009-03-31 | 2010-10-07 | 日立建機株式会社 | 電源システムを備えた建設機械及び産業車両 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015529293A (ja) * | 2012-09-21 | 2015-10-05 | ハーニッシュフェガー テクノロジーズ インコーポレーテッド | 予測可能な作業サイクルを遂行する機械類のためのエネルギー管理システム |
| JP2018150803A (ja) * | 2012-09-21 | 2018-09-27 | ハーニッシュフェガー テクノロジーズ インコーポレーテッド | 予測可能な作業サイクルを遂行する機械類のためのエネルギー管理システム |
| JP2014087115A (ja) * | 2012-10-22 | 2014-05-12 | Kobe Steel Ltd | 建設機械用2次電池保護回路 |
| JP2014198970A (ja) * | 2013-03-29 | 2014-10-23 | 住友重機械工業株式会社 | ショベル |
| CN103342124A (zh) * | 2013-07-25 | 2013-10-09 | 潍柴动力股份有限公司 | 一种取力器取力的控制方法及装置 |
| JP2016132968A (ja) * | 2015-01-22 | 2016-07-25 | 日立建機株式会社 | ハイブリッド建設機械 |
| KR20170037657A (ko) | 2015-01-22 | 2017-04-04 | 히다찌 겐끼 가부시키가이샤 | 하이브리드 건설 기계 |
| US10150465B2 (en) | 2015-01-22 | 2018-12-11 | Hitachi Construction Machinery Co., Ltd. | Hybrid construction machine |
| WO2024075650A1 (ja) * | 2022-10-06 | 2024-04-11 | 日立建機株式会社 | 作業機械 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012050010A1 (ja) | 2012-04-19 |
| US20140147238A1 (en) | 2014-05-29 |
| EP2628857A1 (en) | 2013-08-21 |
| CN103154388A (zh) | 2013-06-12 |
| KR20140009129A (ko) | 2014-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012082644A (ja) | 建設機械 | |
| JP5340381B2 (ja) | 電源システムを備えた建設機械及び産業車両 | |
| JP5356543B2 (ja) | 作業用車両の駆動制御装置 | |
| CN102459769B (zh) | 混合式挖土机及其控制方法 | |
| JP5198661B2 (ja) | ハイブリッド型作業機械及び作業機械の制御方法 | |
| JP5841399B2 (ja) | ハイブリッド式建設機械及びその制御方法 | |
| JP6014463B2 (ja) | 作業車両 | |
| JP5154578B2 (ja) | ハイブリッド式建設機械 | |
| JP5174875B2 (ja) | ハイブリッドホイールローダ | |
| EP2314848A1 (en) | Hybrid construction machine | |
| WO2016117547A1 (ja) | ハイブリッド建設機械 | |
| JP2010173599A (ja) | ハイブリッド式作業機械の制御方法、及びサーボ制御システムの制御方法 | |
| WO2016117232A1 (ja) | ハイブリッド建設機械 | |
| JP2012025249A (ja) | ハイブリッド型建設機械 | |
| JP2015123803A (ja) | ハイブリッド式作業車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120521 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130222 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140715 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141111 |