JP2010143413A - 船舶用操舵装置およびそれを備えた船舶 - Google Patents
船舶用操舵装置およびそれを備えた船舶 Download PDFInfo
- Publication number
- JP2010143413A JP2010143413A JP2008322973A JP2008322973A JP2010143413A JP 2010143413 A JP2010143413 A JP 2010143413A JP 2008322973 A JP2008322973 A JP 2008322973A JP 2008322973 A JP2008322973 A JP 2008322973A JP 2010143413 A JP2010143413 A JP 2010143413A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- steering angle
- control
- phase shift
- turning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/06—Steering by rudders
- B63H25/36—Rudder-position indicators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/42—Steering or dynamic anchoring by propulsive elements; Steering or dynamic anchoring by propellers used therefor only; Steering or dynamic anchoring by rudders carrying propellers
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
【解決手段】船舶1は、ステアリングハンドル5a、コントローラ6、転舵機構4および船外機3を備えている。ステアリングハンドル5aの操舵角θは、操舵角センサ5bによって検出される。転舵機構4の転舵角δは、転舵角センサ30によって検出される。コントローラ6は、操舵角θに応じて転舵機構4を制御する転舵制御を実行する。起動時には、コントローラ6は、操舵角θと転舵角δとの位相がずれているかどうかを判定する。位相がずれている場合、コントローラ6は、ステアリングハンドル5aの操作によって当該位相ずれが解消されるまで、転舵制御の開始を遅延させる。転舵制御が遅延されていることは、インジケータ7の点滅駆動によって操船者に報知される。
【選択図】図3
Description
下記特許文献1には、ステアリングハンドルの回転角を検出する回転角センサの出力に応じて、転舵アクチュエータの動作をECU(電子制御ユニット)によって制御する構成が開示されている。この構成の場合、ステアリングハンドルと転舵機構との間には機械的な結合がなく、船外機の転舵は、専ら電気的な制御に従う。そのため、ステアリングハンドルの操舵角と船外機の転舵角とが同位相であることを保証できない。すなわち、システムの電源が遮断されている状態でステアリングハンドルが回転されると、操舵角と転舵角との位相ずれが生じることになる。そこで、この先行技術では、船外機の内燃機関が始動されると、操舵角と転舵角との位相ずれが調べられる。そして、位相ずれがある場合には、ステアリングハンドルが操作されたときに、その位相ずれを解消するように、転舵アクチュエータによって船外機が自動転舵される。
そこで、この発明の目的は、操舵角と転舵角との位相ずれを解消することができる船舶用操舵装置およびそれを備えた船舶を提供することである。
また、この発明の他の目的は、2つの操作手段の間の位相ずれを解消でき、それらの操作手段の間の切換えを円滑に行える船舶用操舵装置およびそれを備えた船舶を提供することである。
操舵角は、操作手段の操作角または操作位置を表す値であり、転舵角と対比し得る値であればよい。
この構成によれば、位相ずれ解消のために転舵機構の制御開始が遅延されているときは、このことが報知される。
また、前記船舶用操舵装置は、さらに、位相ずれの方向または位相ずれ解消のための操作方向を操船者に報知する操作支援情報報知手段をさらに備えていてもよい。
請求項3記載の発明は、船舶に取り付けられる転舵機構と、船舶の舵取りのために操作者によって操作される第1操作手段および第2操作手段と、前記第1操作手段の操舵角である第1操舵角を検出する第1操舵角検出手段と、前記第2操作手段の操舵角である第2操舵角を検出する第2操舵角検出手段と、前記第1操舵角検出手段によって検出される第1操舵角に応じて前記転舵機構を制御する第1制御状態、および前記第2操舵角検出手段によって検出される第2操舵角に応じて前記転舵機構を制御する第2制御状態を有する転舵制御手段と、前記第1操舵角検出手段によって検出される第1操舵角と前記第2操舵角検出手段によって検出される第2操舵角との位相がずれているかどうかを判定する操舵角位相ずれ判定手段と、前記転舵制御手段の制御状態を前記第1制御状態および前記第2制御状態の間で切り換える制御切換え手段と、前記制御切換え手段による制御状態の切換え時に、前記第1および第2操舵角の位相がずれていると前記操舵角位相ずれ判定手段によって判定されたとき、前記第1または第2操作手段の操作によって前記位相ずれが解消されるのを待って、前記制御状態の切換えを有効化する切換え遅延手段とを含む、船舶用操舵装置である。
前記制御切換え手段は、操船者によって操作される切換え操作手段の操作入力に応答して、制御状態を切り換えるものであってもよい。この場合、制御状態切換え手段は、船舶に備えられる推進機からの推進力が発生されているときには、切換え操作手段からの操作入力を無効化するものであることが好ましい。
請求項4記載の発明は、前記切換え遅延手段によって、前記制御状態の切換えが遅延されていることを報知する報知手段をさらに含む、請求項3記載の船舶用操舵装置である。
前記報知手段は、操船者の視覚に訴える表示手段であってもよいし、操船者の聴覚に訴える報知音発生手段であってもよい。
また、前記船舶用操舵装置は、さらに、位相ずれの方向または位相ずれ解消のための操作方向を操船者に報知する操作支援情報報知手段をさらに備えていてもよい。
この構成によれば、操船者に与える違和感を抑制しつつ、操作手段と転舵機構との位相ずれ、または第1および第2操作手段の位相ずれを解消することができる。
前記船舶には、船体に推進力を与える推進機が備えられていてもよい。推進機は、船外機(アウトボードモータ)、船内外機(スターンドライブ。インボードモータ・アウトボードドライブ)、船内機(インボードモータ)、ウォータージェットドライブのいずれの形態であってもよい。船外機は、原動機および推進力発生部材(プロペラ)を含むものである。この場合、転舵機構は、船外機全体を船体に対して水平方向に回動させるものであってもよい。船内外機は、原動機が船内に配置され、推進力発生部材および転舵機構を含むドライブユニットが船外に配置されたものである。船内機は、原動機およびドライブユニットがいずれも船体に内蔵され、ドライブユニットからプロペラシャフトが船外に延び出た形態を有する。この場合、転舵機構は別途設けられることになる。ウォータージェットドライブは、船底から吸い込んだ水をポンプで加速し、船尾の噴射ノズルから噴射することで推進力を得るものである。この場合、転舵機構は、噴射ノズルと、この噴射ノズルを水平面に沿って回動させる機構とで構成される。
図1は、この発明の第1の実施形態に係る船舶の構成を説明するための図解的な平面図である。船舶1は、船体2と、船外機3と、転舵機構4と、操作部5と、コントローラ6とを備えている。
船外機3は、船体2の船尾板2aに取り付けられており、左右方向の揺動(転舵)が可能な状態とされている。船外機3は、原動機としてのエンジン(内燃機関)10と、このエンジン10によって回転駆動されるプロペラ11とを有している。エンジン10が収容された上部はトップカウリング12によって保護されている。転舵機構4は、船外機3を左右に揺動(転舵)させる。
コントローラ6は、いわゆる電子制御ユニット(ECU)であり、マイクロコンピュータを備えている。コントローラ6は、操舵角センサ5bによって検出される操舵角に応じて、転舵機構4の動作を制御する。また、制御系統の図示は省略するが、コントローラ6は、エンジン10の出力を制御する機能も備えている。
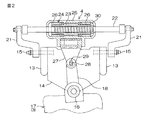
転舵機構4は、左右一対の支持部材21と、ボールねじ軸22と、ボールねじナット23と、転舵用モータ24とを備えている。一対の支持部材21は、クランプブラケット13にチルト軸15を介して回動自在に支持されている。これらの支持部材21の間にボールねじ軸22が架け渡されている。このボールねじ軸22にボールねじナット23が螺合している。転舵用モータ24はボールねじナット23をボールねじ軸22まわりに回転させるものであり、ボールねじナット23を収容するハウジング25を有している。
転舵用モータ24は、ハウジング25内に固定されたステータ26を備え、このステータ26のコイル(図示せず)に通電することによって、ロータとしてのボールねじナット23を回転駆動する。この転舵用モータ24の回転が、コントローラ6によって制御されるようになっている。ハウジング25内には、ボールねじナット23の回転を検出することにより、船外機3の転舵角を検出する転舵角センサ30が備えられている。転舵角センサ30は、たとえば、ボールねじナット23の外周面に形成された多数の溝(突条)を磁束の変化によって検出するギャップセンサで構成することができる。船外機3の転舵角とは、船外機3のプロペラ中心線11aが船体2の中心線2bに対してなす角であり、以下では、「転舵機構4の転舵角」という場合もある。中心線2bは、船首および船尾中央を通る直線である。
転舵制御ユニット31としての機能とは、操舵角センサ5bによって検出される操舵角θに応じて船外機3の目標転舵角δ*を設定し、この目標転舵角δ*が達成されるように転舵用モータ24を制御することである。すなわち、コントローラ6は、転舵角センサ30によって検出される転舵角δが目標転舵角δ*と一致するように、転舵用モータ24をフィードバック制御する。
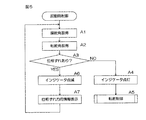
図5は、コントローラ6の起動時における動作例を説明するためのフローチャートである。コントローラ6の起動とは、電源が投入された場合のほか、何らかの理由(たとえば、制御異常からの復帰)によりコントローラ6が再起動される場合も含まれる。
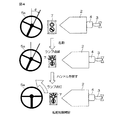
一方、位相ずれが生じているときには(ステップA3:YES)、コントローラ6は、転舵制御を開始せずに遅延させ(転舵制御遅延ユニット33としての機能)、インジケータ7を点滅駆動して、操船者に転舵制御の開始が遅延されていることを報知する(ステップA6。報知制御ユニット34としての機能)。さらに、コントローラ6は、位相ずれの方向を表す情報を表示器8に表示する(ステップA7。報知制御ユニット34としての機能)。この後は、コントローラ6の処理は、ステップA1に戻る。
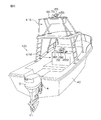
この船舶100は、船体40と、船外機3と、転舵機構4とを有している。船外機3は船体40の後尾(船尾)に取り付けられており、その取り付け構造は、第1の実施形態の場合と同様である。転舵機構4の構造も第1の実施形態の場合と同様である。
メインステーション41Mには、メインステアリングハンドル5Mと、メインインジケータ7Mと、メイン表示器8M、メインキースイッチ装置45Mとが配置されている。同様に、サブステーション41Sには、サブステアリングハンドル5Sと、サブインジケータ7Sと、サブ表示器8Sと、サブキースイッチ装置45Sとが配置されている。
シフト機構9は、船外機ECU50によって、前進位置、後進位置およびニュートラル位置のいずれかのシフト位置に制御される。前進位置とは、プロペラ11が前進方向の推進力を発生する回転方向に回転するようにエンジン10の駆動力を当該プロペラ11に伝達するシフト位置である。後進位置とは、プロペラ11が後進方向の推進力を発生する回転方向に回転するようにエンジン10の駆動力を当該プロペラ11に伝達するシフト位置である。ニュートラル位置とは、エンジン10の駆動力をプロペラ11に伝達しないシフト位置である。したがって、シフト機構9のシフト位置をニュートラル位置に制御することによって、推進力の発生を停止させることができる。また、船外機ECU50は、エンジン10のスロットル開度を制御することにより、エンジン10の回転速度を制御することができる。
また、メインコントローラ6Mにはメインキースイッチ装置45Mが接続されており、サブコントローラ6Sにはサブキースイッチ装置45Sが接続されている。メインキースイッチ装置45Mは、始動/停止スイッチ46Mおよびステーション切換えスイッチ47Mを備えている。同様に、サブキースイッチ装置45Sは、始動/停止スイッチ46Sおよびステーション切換えスイッチ47Sを備えている。
ステーション切換えスイッチ47Mは、コントローラ6M,6Sの制御モードを、メインステーションモードに設定するためのスイッチである。メインステーションモードとは、メインステーション41Mからの操作入力を有効化し、サブステーション41Sからの操作入力を無効化する制御モードである。同様に、ステーション切換えスイッチ47Sは、コントローラ6M,6Sの制御モードを、サブステーションモードに設定するためのスイッチである。サブステーションモードとは、サブステーション41Sからの操作入力を有効化し、メインステーション41Mからの操作入力を無効化する制御モードである。
具体的には、メインキースイッチ装置45Mの始動/停止スイッチ46Mによって電源投入されると、メインコントローラ6Mおよびサブコントローラ6Sの両方が起動し、船外機3にも電源が投入される。メインキースイッチ装置45Mからの操作で起動されたときの制御モードは、メインステーションモードである。したがって、メインコントローラ6Mによる転舵制御が有効になる。ただし、メインコントローラ6Mの転舵制御を有効化する前に、メインコントローラ6Mは、メインステアリングハンドル5Mの操舵角θMと転舵機構4の転舵角δとの位相ずれの有無を判定する。位相ずれがなければ、メインコントローラ6Mは、ただちに転舵制御を開始するが、有意な位相ずれがあるときには、メインコントローラ6Mは、メインステアリングハンドル5Mの操作によって位相ずれが解消されるまで転舵制御の開始を遅延させる。この間、メインインジケータ7Mが点滅駆動され、メイン表示器8Mには、位相ずれの方向に関する情報が表示される。
また、サブコントローラ6Sは、サブ表示器8Sに位相ずれの方向に関する情報を表示させる。この情報は、位相ずれの方向であってもよい。この場合、操船者は、表示された方向とは反対方向にサブステアリングハンドル5Sを回転操作することによって、位相ずれを解消することができる。また、前記情報は、位相ずれを解消するためにサブステアリングハンドル5Sを操作すべき方向であってもよい。この場合、操船者は、表示された方向にサブステアリングハンドル5Sを回転操作することによって、位相ずれを解消することができる。
図9Aおよび図9Bは、制御モード切換え(ステーション切換え)に関連する動作を説明するためのフローチャートである。図9Aはメインステーション41Mにおける動作を示し、図9Bはサブステーション41Sにおける動作を示す。
一方、サブステーションモードのときには(ステップM2:NO)、メインコントローラ6Mは、メインキースイッチ装置45Mのステーション切換えスイッチ47Mが操作されたかどうかを判断する(ステップM6)。ステーション切換えスイッチ47Mが操作されなければ(ステップM6:NO)、メインコントローラ6Mは、さらに、サブステーションモードからメインステーションモードへの切換えの遅延中かどうかを判断する(ステップM7)。切換え遅延中でなければ(ステップM7:NO)、当該制御周期では、以後の処理を行わない。
一方、メインステーションモードのときには(ステップS2:NO)、サブコントローラ6Sは、サブキースイッチ装置45Sのステーション切換えスイッチ47Sが操作されたかどうかを判断する(ステップS6)。ステーション切換えスイッチ47Sが操作されなければ(ステップS6:NO)、サブコントローラ6Sは、さらに、メインステーションモードからサブステーションモードへの切換えの遅延中かどうかを判断する(ステップS7)。切換え遅延中でなければ(ステップS7:NO)、当該制御周期では、以後の処理を行わない。
以下に、「課題を解決するための手段」の項に記載した用語と前述の実施形態における用語との対応関係を示す。
船舶:船舶1
船体:船体2
転舵機構:転舵機構4
推進機:船外機3
操作手段:ステアリングハンドル5a,5M,5S
第1操作手段:メインステアリングハンドル5M
第2操作手段:サブステアリングハンドル5S
操舵角検出手段:操舵角センサ5b,51M,51S
第1操舵角検出手段:メイン操舵角センサ51M
第2操舵角検出手段:サブ操舵角センサ51S
転舵角検出手段:転舵角センサ30
転舵制御手段:転舵制御ユニット31,31M,31S
位相ずれ判定手段:位相ずれ判定ユニット32,32M,32S
転舵制御遅延手段:転舵制御遅延ユニット33,33M,33S
制御切換え手段:モード切換え制御ユニット35M,35S
切換え操作手段:ステーション切換えスイッチ47M,47S
操舵角位相ずれ判定手段:ステーション間位相ずれ判定ユニット36M,36S
切換え遅延手段:切り換え遅延ユニット37M,37S
報知手段:インジケータ7,7M,7S(表示手段)
操作支援情報報知手段:表示器8,8M,8S
2 船体
3 船外機
4 転舵機構
5 操作部
5a ステアリングハンドル
5b 操舵角センサ
5M メインステアリングハンドル
5S サブステアリングハンドル
6 コントローラ
6M メインコントローラ
6S サブコントローラ
7 インジケータ
7M メインインジケータ
7S サブインジケータ
8 表示器
8M メイン表示器
8S サブ表示器
9 シフト機構
10 エンジン
11 プロペラ
30 転舵角センサ
31,31M,31S 転舵制御ユニット
32,32M,32S 位相ずれ判定ユニット
33,33M,33S 転舵制御遅延ユニット
34,34M,34S 報知制御ユニット
35M,35S モード切換え制御ユニット
36M,36S ステーション間位相ずれ判定ユニット
37M,37S 切換え遅延ユニット
40 船体
41M メインステーション
41S サブステーション
45M メインキースイッチ装置
45S サブキースイッチ装置
46M,46S 始動/停止スイッチ
47M,47S ステーション切換えスイッチ
48 通信ライン
50 船外機ECU
51M メイン操舵角センサ
51S サブ操舵角センサ
100 船舶
Claims (5)
- 船舶に取り付けられる転舵機構と、
船舶の舵取りのために操作者によって操作される操作手段と、
前記操作手段の操舵角を検出する操舵角検出手段と、
前記転舵機構の転舵角を検出する転舵角検出手段と、
前記操舵角検出手段によって検出される操舵角に応じて前記転舵機構を制御する転舵制御手段と、
前記操舵角検出手段によって検出される操舵角と前記転舵角検出手段によって検出される転舵角との位相がずれているかどうかを判定する位相ずれ判定手段と、
前記転舵制御手段の起動時に、前記操舵角および転舵角の位相がずれていると前記位相ずれ判定手段によって判定されたとき、前記操作手段の操作によって前記位相ずれが解消されるのを待って、前記転舵制御手段による前記転舵機構の制御を開始する転舵制御遅延手段とを含む、操船舶用操舵装置。 - 前記転舵制御遅延手段によって前記転舵機構の制御開始が遅延されていることを報知する報知手段をさらに含む、請求項1記載の船舶用操舵装置。
- 船舶に取り付けられる転舵機構と、
船舶の舵取りのために操作者によって操作される第1操作手段および第2操作手段と、
前記第1操作手段の操舵角である第1操舵角を検出する第1操舵角検出手段と、
前記第2操作手段の操舵角である第2操舵角を検出する第2操舵角検出手段と、
前記第1操舵角検出手段によって検出される第1操舵角に応じて前記転舵機構を制御する第1制御状態、および前記第2操舵角検出手段によって検出される第2操舵角に応じて前記転舵機構を制御する第2制御状態を有する転舵制御手段と、
前記第1操舵角検出手段によって検出される第1操舵角と前記第2操舵角検出手段によって検出される第2操舵角との位相がずれているかどうかを判定する操舵角位相ずれ判定手段と、
前記転舵制御手段の制御状態を前記第1制御状態および前記第2制御状態の間で切り換える制御切換え手段と、
前記制御切換え手段による制御状態の切換え時に、前記第1および第2操舵角の位相がずれていると前記操舵角位相ずれ判定手段によって判定されたとき、前記第1または第2操作手段の操作によって前記位相ずれが解消されるのを待って、前記制御状態の切換えを有効化する切換え遅延手段とを含む、船舶用操舵装置。 - 前記切換え遅延手段によって、前記制御状態の切換えが遅延されていることを報知する報知手段をさらに含む、請求項3記載の船舶用操舵装置。
- 船体と、
前記船体に装備された、請求項1〜4のいずれか一項に記載の船舶用操舵装置とを含む、船舶。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008322973A JP5149139B2 (ja) | 2008-12-18 | 2008-12-18 | 船舶用操舵装置およびそれを備えた船舶 |
| US12/637,899 US8141510B2 (en) | 2008-12-18 | 2009-12-15 | Marine vessel steering device and marine vessel including the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008322973A JP5149139B2 (ja) | 2008-12-18 | 2008-12-18 | 船舶用操舵装置およびそれを備えた船舶 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010143413A true JP2010143413A (ja) | 2010-07-01 |
| JP2010143413A5 JP2010143413A5 (ja) | 2011-09-29 |
| JP5149139B2 JP5149139B2 (ja) | 2013-02-20 |
Family
ID=42264212
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008322973A Active JP5149139B2 (ja) | 2008-12-18 | 2008-12-18 | 船舶用操舵装置およびそれを備えた船舶 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8141510B2 (ja) |
| JP (1) | JP5149139B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014031078A (ja) * | 2012-08-02 | 2014-02-20 | Suzuki Motor Corp | 船舶のステアバイワイヤ方式操舵システム、その制御方法及びプログラム |
| KR20150107219A (ko) * | 2014-03-13 | 2015-09-23 | 킹스마린 주식회사 | 데이터 통신을 활용한 선박 조타 알람 시스템 |
| JP2021006428A (ja) * | 2019-06-28 | 2021-01-21 | スズキ株式会社 | 船外機 |
| EP3805090A1 (en) | 2019-10-11 | 2021-04-14 | Jtekt Corporation | Steering gear for boat |
| JP2022007496A (ja) * | 2020-06-26 | 2022-01-13 | 株式会社豊田自動織機 | 船舶用操舵装置 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5285490B2 (ja) * | 2009-03-31 | 2013-09-11 | ヤマハ発動機株式会社 | 船舶用制御装置、ならびにそれを備えた船舶用推進システムおよび船舶 |
| AU2014321117B2 (en) * | 2013-09-13 | 2018-09-13 | Marine Canada Acquisition Inc. | A steering assembly for docking a marine vessel having at least three propulsion units |
| US9522302B2 (en) * | 2015-02-19 | 2016-12-20 | Herring Paul M | Flipper device and methods for using same |
| US10232925B1 (en) * | 2016-12-13 | 2019-03-19 | Brunswick Corporation | System and methods for steering a marine vessel |
| JP2021030834A (ja) * | 2019-08-22 | 2021-03-01 | ヤマハ発動機株式会社 | 操船システムおよび船舶 |
| JP7200281B2 (ja) * | 2021-03-23 | 2023-01-06 | 本田技研工業株式会社 | 車両システム |
| US11628920B2 (en) | 2021-03-29 | 2023-04-18 | Brunswick Corporation | Systems and methods for steering a marine vessel |
| JP2025001742A (ja) * | 2023-06-21 | 2025-01-09 | ヤマハ発動機株式会社 | 船舶の操舵制御装置および方法、並びに船舶 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57167899A (en) * | 1981-04-10 | 1982-10-15 | Kawasaki Heavy Ind Ltd | Steering frequency reduction circuit for automatic steering equipment in ship |
| WO2003002408A1 (en) * | 2001-06-29 | 2003-01-09 | Marol Co., Ltd. | Steering device |
| JP2003127986A (ja) * | 2001-10-24 | 2003-05-08 | Sanshin Ind Co Ltd | 小型船舶、船外機 |
| JP2005254850A (ja) * | 2004-03-09 | 2005-09-22 | Yamaha Marine Co Ltd | 船舶の操舵装置 |
| JP2006160213A (ja) * | 2004-12-10 | 2006-06-22 | Honda Motor Co Ltd | 船外機の操舵装置 |
| JP2006188212A (ja) * | 2004-12-10 | 2006-07-20 | Honda Motor Co Ltd | 船外機の操舵装置 |
| JP2006298233A (ja) * | 2005-04-22 | 2006-11-02 | Honda Motor Co Ltd | 船外機の制御装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7637871B2 (en) * | 2004-02-26 | 2009-12-29 | Siemens Medical Solutions Usa, Inc. | Steered continuous wave doppler methods and systems for two-dimensional ultrasound transducer arrays |
| JP5089101B2 (ja) | 2006-07-28 | 2012-12-05 | ヤマハ発動機株式会社 | 船舶 |
| JP4680869B2 (ja) * | 2006-11-20 | 2011-05-11 | 本田技研工業株式会社 | 船外機の制御装置 |
-
2008
- 2008-12-18 JP JP2008322973A patent/JP5149139B2/ja active Active
-
2009
- 2009-12-15 US US12/637,899 patent/US8141510B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57167899A (en) * | 1981-04-10 | 1982-10-15 | Kawasaki Heavy Ind Ltd | Steering frequency reduction circuit for automatic steering equipment in ship |
| WO2003002408A1 (en) * | 2001-06-29 | 2003-01-09 | Marol Co., Ltd. | Steering device |
| JP2003127986A (ja) * | 2001-10-24 | 2003-05-08 | Sanshin Ind Co Ltd | 小型船舶、船外機 |
| JP2005254850A (ja) * | 2004-03-09 | 2005-09-22 | Yamaha Marine Co Ltd | 船舶の操舵装置 |
| JP2006160213A (ja) * | 2004-12-10 | 2006-06-22 | Honda Motor Co Ltd | 船外機の操舵装置 |
| JP2006188212A (ja) * | 2004-12-10 | 2006-07-20 | Honda Motor Co Ltd | 船外機の操舵装置 |
| JP2006298233A (ja) * | 2005-04-22 | 2006-11-02 | Honda Motor Co Ltd | 船外機の制御装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014031078A (ja) * | 2012-08-02 | 2014-02-20 | Suzuki Motor Corp | 船舶のステアバイワイヤ方式操舵システム、その制御方法及びプログラム |
| KR20150107219A (ko) * | 2014-03-13 | 2015-09-23 | 킹스마린 주식회사 | 데이터 통신을 활용한 선박 조타 알람 시스템 |
| KR101583565B1 (ko) * | 2014-03-13 | 2016-01-08 | 킹스마린 주식회사 | 데이터 통신을 활용한 선박 조타 알람 시스템 |
| JP2021006428A (ja) * | 2019-06-28 | 2021-01-21 | スズキ株式会社 | 船外機 |
| JP7226141B2 (ja) | 2019-06-28 | 2023-02-21 | スズキ株式会社 | 船外機 |
| EP3805090A1 (en) | 2019-10-11 | 2021-04-14 | Jtekt Corporation | Steering gear for boat |
| JP2022007496A (ja) * | 2020-06-26 | 2022-01-13 | 株式会社豊田自動織機 | 船舶用操舵装置 |
| JP7375689B2 (ja) | 2020-06-26 | 2023-11-08 | 株式会社豊田自動織機 | 船舶用操舵装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100154697A1 (en) | 2010-06-24 |
| US8141510B2 (en) | 2012-03-27 |
| JP5149139B2 (ja) | 2013-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5149139B2 (ja) | 船舶用操舵装置およびそれを備えた船舶 | |
| US11117643B2 (en) | Vessel propulsion system and vessel | |
| JP4331628B2 (ja) | 船舶推進装置の操舵装置および船舶 | |
| JP4327617B2 (ja) | 船舶推進装置のステアリング制御方法 | |
| US8589004B1 (en) | Boat propulsion system and method for controlling boat propulsion system | |
| JP5441531B2 (ja) | 船推進機 | |
| JP2014080083A (ja) | 船舶用ステアリングシステム | |
| JP5102752B2 (ja) | 船外機制御装置およびそれを備えた船舶 | |
| US12528572B2 (en) | Watercraft propulsion system, and watercraft | |
| JP2008126771A (ja) | 船舶用操舵装置及び船舶 | |
| JP2024060163A (ja) | 船舶推進システムおよび船舶 | |
| EP4089004A2 (en) | Marine vessel maneuvering system | |
| JP2023076240A (ja) | 船舶航走システムおよびそれを備える船舶 | |
| JP5371408B2 (ja) | 船外機制御装置およびそれを備えた船舶 | |
| JP7132296B2 (ja) | 操船システムおよび船舶 | |
| CA3180824C (en) | Marine propulsion system and marine vessel with motorized forward-rearward movement | |
| JP2025001741A (ja) | 船舶の操舵制御装置および方法、並びに船舶 | |
| JP2024060161A (ja) | 船舶推進システムおよび船舶 | |
| US12612148B2 (en) | Marine propulsion system, control method therefor, and marine vessel | |
| US20250050999A1 (en) | Marine propulsion system, control method therefor, and marine vessel | |
| JP4303260B2 (ja) | 船舶の操舵装置 | |
| US20250050996A1 (en) | Marine propulsion system, control method therefor, and marine vessel | |
| US12486014B2 (en) | Marine propulsion system and marine vessel | |
| US20250050997A1 (en) | Marine propulsion system, control method therefor, and marine vessel | |
| US20250242902A1 (en) | Boat control system and boat |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110817 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110817 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120927 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121129 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5149139 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |