以下、本発明の一実施形態を図1〜図28に基づいて説明する。図1には、一実施形態に係る画像形成装置としてのレーザプリンタ1000の概略構成が示されている。
このレーザプリンタ1000は、光走査装置1010、感光体ドラム1030、帯電チャージャ1031、現像ローラ1032、転写チャージャ1033、除電ユニット1034、クリーニングユニット1035、トナーカートリッジ1036、給紙コロ1037、給紙トレイ1038、レジストローラ対1039、定着ローラ1041、排紙ローラ1042、排紙トレイ1043、通信制御装置1050、及び上記各部を統括的に制御するプリンタ制御装置1060などを備えている。なお、これらは、プリンタ筐体1044の中の所定位置に収容されている。
通信制御装置1050は、ネットワークなどを介した上位装置(例えばパソコン)との双方向の通信を制御する。
感光体ドラム1030は、円柱状の部材であり、その表面には感光層が形成されている。すなわち、感光体ドラム1030の表面が被走査面である。そして、感光体ドラム1030は、図1における矢印方向に回転するようになっている。
帯電チャージャ1031、現像ローラ1032、転写チャージャ1033、除電ユニット1034及びクリーニングユニット1035は、それぞれ感光体ドラム1030の表面近傍に配置されている。そして、感光体ドラム1030の回転方向に沿って、帯電チャージャ1031→現像ローラ1032→転写チャージャ1033→除電ユニット1034→クリーニングユニット1035の順に配置されている。
帯電チャージャ1031は、感光体ドラム1030の表面を均一に帯電させる。
光走査装置1010は、帯電チャージャ1031で帯電された感光体ドラム1030の表面に、上位装置からの画像情報に基づいて変調された光束を照射する。これにより、感光体ドラム1030の表面には、画像情報に対応した潜像が形成される。ここで形成された潜像は、感光体ドラム1030の回転に伴って現像ローラ1032の方向に移動する。なお、この光走査装置1010の構成については後述する。
トナーカートリッジ1036にはトナーが格納されており、該トナーは現像ローラ1032に供給される。
現像ローラ1032は、感光体ドラム1030の表面に形成された潜像にトナーカートリッジ1036から供給されたトナーを付着させて画像情報を顕像化させる。ここでトナーが付着した潜像(以下では、便宜上「トナー像」ともいう)は、感光体ドラム1030の回転に伴って転写チャージャ1033の方向に移動する。
給紙トレイ1038には記録紙1040が格納されている。この給紙トレイ1038の近傍には給紙コロ1037が配置されており、該給紙コロ1037は、記録紙1040を給紙トレイ1038から1枚づつ取り出し、レジストローラ対1039に搬送する。該レジストローラ対1039は、給紙コロ1037によって取り出された記録紙1040を一旦保持するとともに、該記録紙1040を感光体ドラム1030の回転に合わせて感光体ドラム1030と転写チャージャ1033との間隙に向けて送り出す。
転写チャージャ1033には、感光体ドラム1030の表面のトナーを電気的に記録紙1040に引きつけるために、トナーとは逆極性の電圧が印加されている。この電圧により、感光体ドラム1030の表面のトナー像が記録紙1040に転写される。ここで転写された記録紙1040は、定着ローラ1041に送られる。
定着ローラ1041では、熱と圧力とが記録紙1040に加えられ、これによってトナーが記録紙1040上に定着される。ここで定着された記録紙1040は、排紙ローラ1042を介して排紙トレイ1043に送られ、排紙トレイ1043上に順次スタックされる。
除電ユニット1034は、感光体ドラム1030の表面を除電する。
クリーニングユニット1035は、感光体ドラム1030の表面に残ったトナー(残留トナー)を除去する。残留トナーが除去された感光体ドラム1030の表面は、再度帯電チャージャ1031に対向する位置に戻る。
次に、前記光走査装置1010の構成について説明する。
この光走査装置1010は、図2に示されるように、偏向器側走査レンズ11a、像面側走査レンズ11b、ポリゴンミラー13、光源ユニット14、カップリングレンズ15、開口板16、シリンドリカルレンズ17、2つの光検知センサ(18a、18b)、2つの光検知用ミラー(19a、19b)、液晶偏向素子20、走査制御装置22(図2では図示省略、図12参照)、及び2つのステッピングモータ(315、340)(図2では図示省略、図23参照)などを備えている。そして、これらは、ハウジング22の中の所定位置に組み付けられている。
2つの光検知センサは、互いに同じセンサである。
なお、本明細書では、XYZ3次元直交座標系において、感光体ドラム1030の長手方向に沿った方向をY軸方向、各走査レンズ(11a、11b)の光軸に沿った方向をX軸方向として説明する。また、以下では、便宜上、主走査方向に対応する方向を「主走査対応方向」と略述し、副走査方向に対応する方向を「副走査対応方向」と略述する。
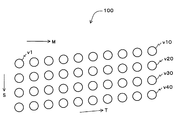
光源ユニット14は、一例として図3に示されるように、2次元的に配列された40個の発光部(v1〜v40)が1つの基板上に形成された2次元アレイ100を有している。図3におけるM方向は主走査対応方向であり、S方向は副走査対応方向である。また、T方向は、M方向及びS方向のいずれに対しても傾斜した方向である。
この2次元アレイ100は、T方向に沿って10個の発光部が等間隔に配置された発光部列を4列有している。そして、これらの発光部列は、すべての発光部をS方向に伸びる仮想線上に正射影したときに等間隔となるように配置されている。なお、本明細書では、「発光部間隔」とは2つの発光部の中心間距離をいう。
また、各発光部は、発振波長が780nm帯の垂直共振器型の面発光レーザ(Vertical Cavity Surface Emitting Laser:VCSEL)である。すなわち、2次元アレイ100は、いわゆる面発光レーザアレイである。
光源ユニット14は、2次元アレイ100の各発光部を個別に駆動する不図示の駆動回路を有している。そして、2次元アレイ100及び駆動回路は、不図示の制御基板に実装されている。
図2に戻り、ここでは、光源ユニット14は、ハウジング22の+Y側の端部近傍に配置されている。
カップリングレンズ15は、光源ユニット14から出力された光束を略平行光とする。
開口板16は、開口部を有し、カップリングレンズ15を介した光束のビーム径を規定する。
液晶偏向素子20は、開口板16の開口部を通過した光束の光路上に配置され、印加電圧に応じて、入射光を副走査対応方向(ここでは、Z軸方向)に関して偏向することができる。この液晶偏向素子20は、2枚の透明なガラス板の間に液晶が封入された構成であり、一例として図4(A)に示されるように、一方のガラス板の表面の上下に電極が形成されている。この電極間に電位差が与えられると、一例として図4(B)に示されるように、副走査対応方向に関して電位の傾斜が発生し、それに応じて液晶の配向が変化し、その結果、副走査対応方向に関して屈折率の傾斜が発生する。これにより、プリズムと同様に光の射出軸を副走査対応方向に関してわずかに傾けることができる。なお、液晶としては誘電異方性を有するネマティック液晶等が用いられる。
図2に戻り、シリンドリカルレンズ17は、副走査対応方向(ここでは、Z軸方向)に強いパワーを有し、液晶偏向素子20を介した光束をポリゴンミラー13の偏向反射面近傍で副走査対応方向に関して結像する。また、シリンドリカルレンズ17は、各走査レンズと共同し、副走査対応方向に関して面倒れ補正系を構成している。
光源ユニット14とポリゴンミラー13との間の光路上に配置される光学系は、偏向器前光学系とも呼ばれている。本実施形態では、偏向器前光学系は、カップリングレンズ15と開口板16と液晶偏向素子20とシリンドリカルレンズ17とから構成されている。
ポリゴンミラー13は、4面鏡を有し、各鏡がそれぞれ偏向反射面となる。このポリゴンミラー13は、Z軸方向に平行な軸の周りに等速回転し、シリンドリカルレンズ17からの光束を偏向する。
偏向器側走査レンズ11aは、ポリゴンミラー13で偏向された光束の光路上に配置されている。
像面側走査レンズ11bは、偏向器側走査レンズ11aを介した光束の光路上に配置されている。
像面側走査レンズ11bを介した光束は、感光体ドラム1030の表面に集光され、光スポットが形成される。この光スポットは、ポリゴンミラー13の回転に伴って感光体ドラム1030の長手方向に移動する。すなわち、感光体ドラム1030上を走査する。このときの光スポットの移動方向が「主走査方向」である。また、感光体ドラム1030の回転方向が「副走査方向」である。
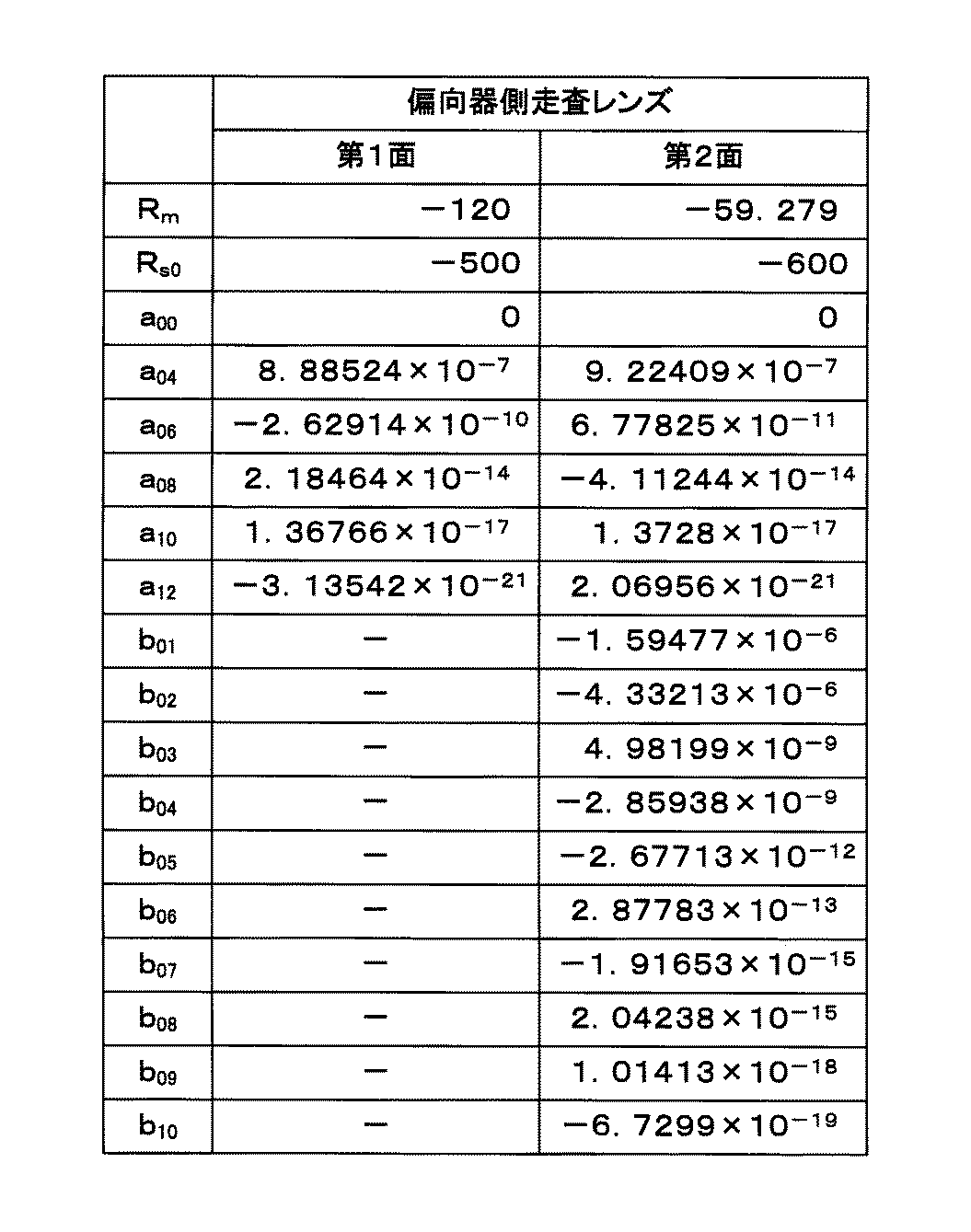
偏向器側走査レンズ11a及び像面側走査レンズ11bは、いずれも樹脂製である。そして、それらの各面(入射面、射出面)は次の(1)式及び次の(2)式で表現される非球面である。ここで、XはX軸方向の座標、YはY軸方向の座標を示す。また、入射面の中央をY=0とする。Cm0はY=0における主走査対応方向の曲率を示し、曲率半径Rmの逆数である。a00,a01,a02,・・・は主走査対応方向の非球面係数である。また、Cs(Y)はYに関する副走査対応方向の曲率、Rs0は副走査対応方向の光軸上の曲率半径、b00,b01,b02,・・・は副走査対応方向の非球面係数である。なお、光軸は、Y=0で副走査対応方向における中央の点を通る軸をいう。
偏向器側走査レンズ11aの各面(入射面(第1面)、射出面(第2面))におけるRm、Rs0及び各非球面係数の値の一例が図5に示されている。
像面側走査レンズ11bの各面(入射面(第3面)、射出面(第4面))におけるRm、Rs0及び各非球面係数の値の一例が図6に示されている。
ポリゴンミラー13と感光体ドラム1030との間の光路上に配置される光学系は、走査光学系とも呼ばれている。本実施形態では、走査光学系は、偏向器側走査レンズ11aと像面側走査レンズ11bとから構成されている。なお、偏向器側走査レンズ11aと像面側走査レンズ11bの間の光路上、及び像面側走査レンズ11bと感光体ドラム1030の間の光路上の少なくとも一方に、少なくとも1つの折り返しミラーが配置されても良い。
走査光学系は、ポリゴンミラー13で偏向された光束を、主走査方向に関して感光体ドラム1030の表面を一定の移動速度で走査する光束に変換するとともに、感光体ドラム1030の表面に集光する。
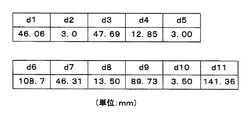
また、偏向器前光学系及び走査光学系の主な光学素子の位置関係が図7に示されている。そして、図7における符号d1〜d11の具体的な値(単位:mm)の一例が図8に示されている。
また、シリンドリカルレンズ17からの光束の射出方向と、ポリゴンミラー13の偏向反射面により感光体ドラム1030の表面における像高0の位置(図7における符号p0の位置)へ向けて反射される光束の進行方向とのなす角(図7におけるθr)は60度である。
図2に戻り、ポリゴンミラー13で偏向され、走査光学系を介した光束のうち、画像情報の書き込み開始前の光束の一部は、検知用光束として、光検知用ミラー19aを介して光検知センサ18aに入射する。光検知センサ18aにおける検知用光束の入射位置は、ポリゴンミラー13の回転に伴って、主走査対応方向(便宜上、m方向とする)に移動する。
光検知センサ18aは、一例として図9に示されるように、その受光面が光学的に像面(設計上の像面)に略平行となるように配置されている。これにより、検知用光束は、主走査方向に関して、感光体ドラム1030の延長上を移動することと等価になり、検知用光束に対する走査光学系のリニアリティ(走査等速性)を確保しておけば、光検知センサ18aを通過する検知用光束の移動速度を、感光体ドラム1030の画像形成領域での走査速度と同じにすることができ、検知精度を向上させることができる。
なお、図9における符号18a´は、光検知用ミラー19aがないと仮定したときの光検知センサ18aの位置を示している。
また、光検知センサ18aの受光面の法線方向は、光検知センサ18aの受光面での反射光が光源ユニット14に戻らないように、検知用光束の入射方向に対して傾斜している(図9参照)。これにより、光検知センサ18aの受光面での反射光が、光量制御に影響を与えることを回避できる。
光検知センサ18aは、一例として図10に示されるように、2つの受光部(第1受光部181、第2受光部182)を有する受光素子、該受光素子からの受光量に応じた信号(光電変換信号)が入力されるアンプ(AMP)183、該アンプ183の出力信号レベルと予め設定されている基準レベルVsとを比較し、その比較結果を出力する比較器(CMP)184を有している。この比較器184の出力信号は走査制御装置22に供給される。
受光素子の各受光部は、副走査対応方向(便宜上、s方向とする)の位置によってm方向の互いの間隔が異なっている。
第1受光部181は、一例として長方形の受光部であり、長手方向がs方向と一致するように配置されている。すなわち、検知用光束が通過する2辺がいずれもs方向に平行である。
第2受光部182は、一例として平行四辺形の受光部であり、第1受光部181の+m側に配置されている。そして、第2受光部182の長手方向は、受光面内において第1受光部181の長手方向に対して角度θ(0<θ<90°)だけ傾斜している。すなわち、検知用光束が通過する2辺がいずれもm方向に対して傾斜している。
アンプ183では、入力信号の反転及び増幅が行われる。従って、受光素子の受光量が多いほど、アンプ183の出力信号レベルは低くなる。
前記基準レベルVsは、検知用光束が受光素子で受光されたときのアンプ183の出力信号レベル(最低値)よりも若干高いレベルに設定されている。そこで、各受光部のいずれかが検知用光束を受光したときに、比較器184での判断結果が変化し、それに応じて比較器184の出力信号が変化する。
光検知センサ18aは、感光体ドラム1030の表面における光束の入射位置が、設計上の位置のときに、検知用光束が、各受光部のほぼ中央を通過するように調整されている(図11(A)参照)。そして、このときに、検知用光束が第1受光部181で検知されてから第2受光部182で検知されるまでの時間は、基準時間Ts(図11(B)参照)として予め得られている。なお、便宜上、このときの光検知センサ18aにおける検知用光束の入射位置の移動経路、すなわち設計上の移動経路を「経路A」という。
ところで、上記各光学素子をハウジング22内に取り付ける際の取り付け位置の誤差や、経年変化等により、感光体ドラム1030に向かう光束の光路が設計上の光路に対して副走査対応方向(ここでは、Z軸方向)にずれることがある。この場合には、検知用光束も、感光体ドラム1030に向かう光束と同様に、設計上の光路に対して副走査対応方向(ここでは、s方向)にずれることとなる。そして、一例として図11(C)に示されるように、光検知センサ18aにおける検知用光束の入射位置の移動経路も、経路Aに対して副走査対応方向にずれる。なお、便宜上、このときの移動経路を経路Bという。
そして、このときの移動経路のずれ量Δh(図11(C)参照)は、次の(3)式から求めることができる。ここで、ΔTは、比較器184の出力信号における立下りから次の立下りまでの時間Tと前記基準時間Tsとの差であり(図11(D)参照)、Vは検知用光束の移動速度(走査速度)である。このずれ量Δhは、感光体ドラム1030に向かう光束の光路の設計上の光路に対する副走査対応方向(ここでは、Z軸方向)のずれ量と相関関係がある。
Δh=(V/tanθ)×ΔT ……(3)
また、第1受光部181が検知用光束を受光したときの、比較器184の出力信号における立下りタイミングは、s方向における検知用光束の入射位置の影響を受けない(図11(B)及び図11(D)参照)。そこで、第1受光部181が検知用光束を受光したときの、比較器184の出力信号における立下りタイミングから書込開始のタイミングを求めることができる。
図2に戻り、ポリゴンミラー13で偏向され、走査光学系を介した光束のうち、画像情報の書き込み終了後の光束の一部は、検知用光束として、光検知用ミラー19bを介して光検知センサ18bに入射する。
光検知用ミラー19b及び光検知センサ18bは、検知用光束に対して、上記光検知用ミラー19a及び光検知センサ18aと同様の位置関係で配置されている。
そして、光検知センサ18bは、検知用光束に対して、上記光検知センサ18aと同様の信号を出力する。光検知センサ18bの出力信号は走査制御装置22に供給される。
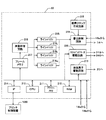
走査制御装置22は、一例として図12に示されるように、CPU210、フラッシュメモリ211、RAM212、液晶素子駆動回路213、IF(インターフェース)214、画素クロック生成回路215、画像処理回路216、フレームメモリ217、ラインバッファ2181〜21840、書込制御回路219、及びステッピングモータ駆動回路220などを有している。なお、図12における矢印は、代表的な信号や情報の流れを示すものであり、各ブロックの接続関係の全てを表すものではない。
画素クロック生成回路215は、画素クロック信号を生成する。
フレームメモリ217は、CPU210によってラスター展開された画像データ(以下、便宜上「ラスターデータ」と略述する)を一時的に格納する。
画像処理回路216は、フレームメモリ217に格納されているラスターデータを読み出し、所定の中間調処理などを行った後、発光部毎のドットデータ(画素データ)を作成し、発光部それぞれに対応したラインバッファ2181〜21840へ出力する。
書込制御回路219は、光検知センサ18aの出力信号に基づいて、第1受光部181が同期検知用の光束を受光したときの、比較器184の出力信号における立下りを監視する。そして、該立下りを検出すると、書込開始のタイミングを求める。そして、書込開始のタイミングに合わせて、ラインバッファ2181〜21840から各発光部のドットデータを読み出し、画素クロック生成回路215からの画素クロック信号に重畳させるとともに、発光部毎にそれぞれ独立した変調データを生成する。ここで生成された変調データは、光源ユニット14の駆動回路に出力される。
フラッシュメモリ211には、CPU210にて解読可能なコードで記述された各種プログラムが格納されている。
RAM212は、作業用のメモリである。
CPU210は、フラッシュメモリ211に格納されているプログラムに従って動作し、光走査装置1010の全体を制御する。
例えば、CPU210は、所定のタイミング毎に、光検知センサ18aの出力信号に基づいて、前記ずれ量Δhを求め、感光体ドラム1030の表面での光束の副走査方向に関する位置ずれ量(以下、便宜上「副走査ずれ量」と略述する)がほぼ0となるように、液晶偏向素子20の印加電圧を決定する。なお、ずれ量Δhと副走査ずれ量とは、一例として図13に示されるように線形の関係にあり、副走査ずれ量と印加電圧との関係は予め求められ、フラッシュメモリ211に格納されている。また、図13における係数kは、装置固有の値であり、予め求めることができる。
また、CPU210は、副走査ずれ量が感光体ドラム1030における走査線の間隔の1/2以上の場合は、副走査ずれ量が低減される方向に画像データをシフトする。
また、CPU210は、所定のタイミング毎に、光検知センサ18bの出力信号に基づいて、前記ずれ量Δhを求める。そして、光検知センサ18aの出力信号から求めたずれ量Δhと光検知センサ18bの出力信号から求めたずれ量Δhとから、感光体ドラム1030における走査線の傾き情報(傾き量(角度)及び傾き方向)を求める。
液晶素子駆動回路215は、CPU210で決定された印加電圧を液晶偏向素子20に印加する。
ステッピングモータ駆動回路220は、CPU210の指示に基づいて、ステッピングモータ315及びステッピングモータ340に駆動信号をそれぞれ出力する。
IF(インターフェース)214は、プリンタ制御装置1060との双方向の通信を制御する通信インターフェースである。上位装置からの画像データは、IF(インターフェース)214を介して供給される。
像面側走査レンズ11bは、図14(A)及び図14(A)のA−A断面図である図14(B)に示されるように、−Z側の面にリブ部306aが形成され、+Z側の面にリブ部306bが形成されている。
そして、リブ部306aには、−X方向に突出した3つの突起部(307a1、307a2、307a3)が形成されている。また、リブ部306bには、−X方向に突出した3つの突起部(307b1、307b2、307b3)が形成されている。
像面側走査レンズ11bは、その形状を安定的に保ち、傾き調整の際に局部的に応力が加わっても像面側走査レンズ11bを変形させることがない(レンズ組み付け時の形状を維持する)ように、板金部材に保持される。
像面側走査レンズ11bが保持される板金部材301が、図15に示されている。この板金部材301は、板金加工で成形された板部材であり、Y軸方向を長手方向とする底板301aと、該底板301aを挟んで対向する2枚の側板(301b、301c)とを有している。
−X側の側板である側板301bには、像面側走査レンズ11bの突起部307a1が係合される切欠部3111、突起部307a2が係合される切欠部3112、突起部307a3が係合される切欠部3113が形成されている。
底板301aには、+Y側の端部近傍及び−Y側の端部近傍に、それぞれ開口部313を伴う立曲げ部310が形成されている。これらの立曲げ部310の上に像面側走査レンズ11bが載置される(図18参照)。
また、底板301aには、側板301bの各切欠部に対応して3つのねじ穴312が形成されている。各ねじ穴312は、像面側走査レンズ11bが載置されたときに、X軸方向に関して、像面側走査レンズ11bのほぼ中央の位置に対応した各位置に形成されている。
さらに、底板301aの+Y側端部には突起部318が形成され、−Y側端部には切欠部321が形成されている。
また、側板301bには、底板301aの各開口部313に対応して2つのスリット314が形成されている。
図16〜図19に示されるように、像面側走査レンズ11bは、3つの第1板ばね302と2つの第2板ばね303によって、板金部材301に保持される。なお、図18では、わかりやすくするため、各側板の図示を省略している。また、図19は図18のA−A断面図である。
第1板ばね302は、給像面側走査レンズ11bのリブ部306aと板金部材301を挟むのに用いられる。ここでは、第1板ばね302は、図17に示されるように、底板部3021と、−X側の側板部3022と、+X側の側板部3023と、該側板部3023の上端から−X方向に延びる上板部3024とからなっている。また、側板部3022には、開口部が形成されている。さらに、底板部3021には、調節ねじ308が貫通する円形の開口部3025が形成されている。
そして、図19に示されるように、側板部3022の開口部にリブ部306aの突起部が係合され、上板部3024によって+X側のリブ部306aに−Z方向の押圧が作用される。
第2板ばね303は、クリップ状の板ばねであり、給像面側走査レンズ11bのリブ部306bに−Z方向の押圧を作用させ、板金部材301の底板301aの−Z側の面に+Z方向の押圧を作用させることによって、像面側走査レンズ11bと板金部材301を挟む。なお、第2板ばね303の−Z側の板部は、外側から開口部313を通過して、スリット304に挿入される。
また、板金部材301の各ねじ穴312には、第1板ばね302の開口部3025を介して調節ねじ308が螺合される。この調節ねじ308の+Z側の先端は、像面側走査レンズ11bのリブ部306aの−Z側の面に当接する。そこで、調節ねじ308をねじ込むことによって像面側走査レンズ11bに+Z方向の押圧を作用させることができる。
この場合、像面側走査レンズ11bに作用する調節ねじ308による押圧力と、第1板ばね302による押圧力は、互いに逆方向に作用するため、像面側走査レンズ11bに作用する力の微調整が可能となる。
例えば、板金部材301の底板301aからの調節ねじ308の突出し量を、立曲げ部310の高さよりも小さくすると、像面側走査レンズ11bをその母線が下側に凸となるように反らすことができる。逆に、調節ねじ308の突出し量を、立曲げ部310の高さよりも大きくすると、像面側走査レンズ11bをその母線が上側に凸となるように反らすことができる。従って、調節ねじ308の突出し量を調整することによって、像面側走査レンズ11bの焦線がZ軸方向に湾曲され、走査線の曲がりを補正することができる。なお、中央部と立曲げ部310との間に配置されている調節ねじ308によって、M型やW型の曲がりについても補正が可能である。
各調節ねじ308による像面側走査レンズ11bの調整における軸は、像面側走査レンズ11bの光軸に平行である。
各調節ねじ308による像面側走査レンズ11bの調整は、出荷時及びメンテナンス時に作業者によって行われる。
ところで、樹脂性の光学素子は、通常、成形性や製造コストの点から、金型を用いた射出成形で製造されている。この場合、成形後の光学素子は、成形条件(金型温度、樹脂温度、射出速度、冷却速度など)に応じた不均一な内部応力を有する。そこで、像面側走査レンズのように、主走査方向に長い樹脂性の光学素子は、副走査対応方向に反りが発生するおそれがある。
また、像面側走査レンズは、長尺で、剛性が低いため、わずかな応力が加わるだけで変形(反り)を生じ易い。
また、像面側走査レンズは、環境温度の変化に伴って副走査対応方向に温度差が生じると、熱膨張量の差によって変形する。
像面側走査レンズにこれらの変形が生じると、感光体ドラムの表面における走査線の状態を出荷時の状態に維持することは非常に困難である。
一般に、走査線の曲がりをキャンセルする方向に像面側走査レンズを湾曲させることによって直線性を矯正している。
図20には、比較例1として、前記特許文献1に開示されている光走査装置において、25℃を初期温度とし、25℃→50℃→25℃→10℃→25℃→50℃→25℃と温度を変化させたときの走査線曲がり量の変化が示されている。この場合には、走査線曲がり量は温度によって大きく変化し、10℃〜50℃の間で約90μmの変化を生じた。また、25℃においては、走査線曲がり量は温度上昇時と温度下降時とで大きく異なり、いわゆるヒステリシスを生じている。前記特許文献1に開示されている光走査装置では、走査レンズの長手方向中央にかまぼこ状の支持部を当接させ傾き調整の支点としている。このような構成の場合、ステッピングモータと支持板の勘合部と中央の支点が温度変動時には固定端として働き、走査レンズの長手方向に対し非対称の応力を発生させる。そこで、25℃においては温度上昇時と温度下降時で支持部材と走査レンズ間で応力の発生の仕方が異なることとなり、ヒステリシスを生じたものと考えられる。
図21には、比較例2として、前記特許文献3に開示されている光走査装置において、25℃を初期温度とし、25℃→50℃→25℃→10℃→25℃→50℃→25℃と温度を変化させたときの走査線曲がり量の変化が示されている。この場合も、温度変化により走査線曲がり量にヒステリシスが発生している。前記特許文献3に開示されている光走査装置では、走査レンズを副走査方向の上下から支持板により挟み込んだ構成であり、調整ネジに対向する板バネは走査レンズに対し板バネの反対側に配置するため、板バネは押しつぶされることとなる。板バネは押しつぶされると永久歪みを生じ易く、ばね弾性力が変化する。そこで、温度変化により板バネの応力歪が緩和されるとヒステリシスが発生し、25℃のときに初期の状態に戻れなくなるものと考えられる。
図22には、本実施形態に係る光走査装置において、25℃を初期温度とし、25℃→50℃→25℃→10℃→25℃→50℃→25℃と温度を変化させたときの走査線曲がり量の変化が示されている。この場合は、上記比較例1及び比較例2に比べて、走査線曲がり量の変化は非常に小さい。ここでは、板バネは押しつぶされるのではなく伸びる方向に変形(弾性変形)するため、永久歪みが生じにくくなるものと考えられる。
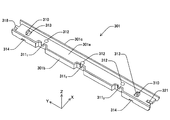
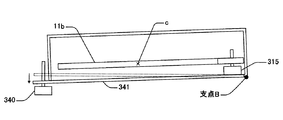
また、ここでは、一例として図23に示されるように、像面側走査レンズ11b、板金部材301、及びステッピングモータ315は、ケース341内に収容されている。
板金部材301における底板301aの突起部318は、ケース341に設けられたガイドに嵌合され、位置決めがなされる。また、底板301aの+Y側端部近傍は、支持部320に支持されるとともに、ケース341に一端が固定されている板ばね326によって−Z方向に付勢される。すなわち、板金部材301は、支持部320と板ばね326とによって、+Y側端部近傍が支持されている。なお、以下では、便宜上、支持部320と板ばね326とによって支持されているところを、「支点A」という。
板金部材301における底板301aの切欠部321には、図24(A)に示されるように、可動筒316の凹部が嵌合されている。この可動筒316には、図24(A)のA−A断面図である図24(B)に示されるように、中心部にZ軸方向のねじ穴が形成されている。
また、板金部材301における底板301aの−Y側端部近傍は、ケース341に一端が固定されている板ばね326によって−Z方向に付勢される。すなわち、板金部材301は、可動筒316と板ばね326とによって、−Y側端部近傍が支持されている。
このように、板金部材301は、Y軸方向に関して、両端部近傍が支持されている。そこで、像面側走査レンズ11bが板金部材301に保持されると、像面側走査レンズ11bは、Y軸方向に関して、両端部近傍が支持されることとなる。
ステッピングモータ315は、シャフトの先端に送りねじが形成されている。そして、この送りねじが可動筒316のねじ穴に螺合されている。
そこで、ステッピングモータ315が回転すると、可動筒316はZ軸方向(像面側走査レンズ11bの高さ方向)に変位する。
ここでは、板金部材301における底板301aの+Y側端部近傍が支持されているため、ステッピングモータ315が回転すると、像面側走査レンズ11bは、光軸に平行で支点Aを通る軸まわりに回動する。そして、それに伴って像面側走査レンズ11bの母線が傾き、その結果、感光体ドラム1030の表面での走査線が傾くこととなる。
図23に戻り、ケース341は、−Y側の端部が支持部342に支持されている。なお、以下では、便宜上、支持部342によって支持されているところを「支点B」という。
ステッピングモータ340は、ケース341を像面側走査レンズ11bの光軸に平行で支点Bを通る軸まわりに回動するために設けられている。
図25には、ステッピングモータ315によって像面側走査レンズ11bを反時計回りで回動させたときの状態が示されている。なお、図25は、わかりやすくするため、簡略化している。また、図25における符号cは、Y軸方向に関する像面側走査レンズ11bの中心である。
ここで、図26に示されるように、像面側走査レンズ11bの傾きをα、Y軸方向に関して、支点Aから像面側走査レンズ11bの中心cまでの距離をmとすると、中心cの変化量Δhは次式(4)で求められる。なお、図26では、わかりやすくするため像面側走査レンズ11bの傾斜角を誇張して図示している。
Δh=m×α ……(4)
図27には、続いて、ステッピングモータ340によってケース341を反時計回りで回動させたときの状態が示されている。なお、図27は、わかりやすくするため、簡略化している。
ここで、図28に示されるように、ケース341の傾きをβ、Y軸方向に関して、このときの支点Bから像面側走査レンズ11bの中心cまでの距離をm´とすると、中心cの変化量Δh´は次式(5)で求められる。なお、図28では、わかりやすくするためケース341の傾斜角を誇張して図示している。
Δh´=m´×β ……(5)
そこで、Δh=Δh´とすれば、像面側走査レンズ11bの中心cの位置を変化させることなく、像面側走査レンズ11bを角度(α+β)だけ傾けることができる。
CPU210は、所定のタイミング毎に、前述したようにして求めた走査線の傾き情報に応じて、Δh=Δh´で、かつ走査線の傾きが0となるようにステッピングモータ駆動回路220を介して各ステッピングモータを制御し、像面側走査レンズ11bの傾き調整を行う。
以上の説明から明らかなように、本実施形態に係る光走査装置1010では、ポリゴンミラー13によって偏向器が構成されている。
また、ステッピングモータ315と支持部320とによって第1の調整機構が構成され、ステッピングモータ340と支持部342とによって第2の調整機構が構成されている。そして、像面側走査レンズ11bの光軸に平行で支点Aを通る軸によって第1の軸が構成され、像面側走査レンズ11bの光軸に平行で支点Bを通る軸によって第2の軸が構成されている。
また、3つの調整ねじによって第3の調整機構が構成されている。
また、光検知センサ18aによって第1のビーム検知センサが構成され、光検知センサ18bによって第2のビーム検知センサが構成されている。
また、走査制御装置22によって制御装置が構成されている。
また、CPU210によるプログラムに従う処理の少なくとも一部をハードウェアによって構成することとしても良いし、あるいは全てをハードウェアによって構成することとしても良い。
以上説明したように、本実施形態に係る光走査装置1010によると、光源ユニット14と、光源ユニット14からの光束を偏向するポリゴンミラー13と、両端部近傍が支持部材に支持されている像面側走査レンズ11bを含み、ポリゴンミラー13で偏向された光束を感光体ドラム1030の表面上に集光する走査光学系と、像面側走査レンズ11bの傾きを調整するための複数の調整機構とを備えている。
前記複数の調整機構は、いずれも像面側走査レンズ11bの光軸に平行な調整用の軸を有し、各調整用の軸は主走査方向に関して互いに異なる位置に設けられている。
この場合には、像面側走査レンズ11bの中心を変位させることなく、像面側走査レンズ11bの傾きを調整することができる。すなわち、像面側走査レンズ11bの中心を通る軸まわりに像面側走査レンズ11bを回動して像面側走査レンズ11bの傾きを調整することができる。
そこで、像面側走査レンズ11bでの光束の劣化が抑制され、安定して高精度の光走査を行うことが可能となる。
また、走査線曲がり量の温度ヒステリシスが小さいため、出荷時に各調節ねじ308で調整しておけば、ユーザ側で環境温度の変動があっても、再度調整する必要はない。
また、CPU210は、所定のタイミング毎に、副走査ずれ量がほぼ0となるように、液晶偏向素子20の印加電圧を決定し、液晶素子駆動回路215を介して液晶偏向素子20に印加している。従って、副走査ずれ量を安定して小さくすることが可能となる。
また、光源ユニット14が、2次元アレイ100を有しているため、同時に複数の走査を行うことが可能となる。
また、本実施形態に係るレーザプリンタ1000によると、光走査装置1010を備えているため、結果として、安定して高品質の画像を形成することが可能となる。
さらに、光走査装置1010が2次元アレイ100を有する光源ユニット14を備えているため、高速で画像を形成することが可能となる。また、形成される画像の高密度化を図ることが可能となる。
また、ネットワークを介して、レーザプリンタ1000と、電子演算装置(コンピュータ等)、画像情報通信システム(ファクシミリ等)等とを接続することにより、1台の画像形成装置で複数の機器からの出力を処理することができる情報処理システムを形成することができる。また、ネットワーク上に複数の画像形成装置を接続すれば、各出力要求から各画像形成装置の状態(ジョブの混み具合、電源が入っているかどうか、故障しているかどうか等)を知ることができ、一番状態の良い(使用者の希望に一番適した)画像形成装置を選択し、画像形成を行うことができる。
なお、上記実施形態では、調節ねじ308が3箇所に設けられる場合について説明したが、M型やW型の曲がりについては補正をする必要がない場合には、調節ねじ308は中央の1箇所だけに設けても良い。
また、上記実施形態では、m≠m’の場合について説明したが、前記ケース341に代えて、m=m’となるようなケースを用いても良い。この場合には、走査線の傾き補正に必要な像面側走査レンズ11bの傾斜角がγのとき、α=β=γ/2とすれば、各ステッピングモータの繰り出し量を等しくすることができる。さらに、この場合には、各ステッピングモータの最大繰り出し量までを調整代とすることができる。
また、α=βであれば、各ステッピングモータを含む調整機構で必要な副走査対応方向に関する調整のための空間を小さくすることができる。
また、上記実施形態では、支点A及び支点BのZ軸方向に関する位置が異なる場合について説明したが、前記ケース341に代えて、支点A及び支点BのZ軸方向に関する位置が、像面側走査レンズ11bのZ軸方向の中心線と一致するようなケースを用いても良い。この場合には、像面側走査レンズ11bの傾き調整を行っても、主走査対応方向及び副走査対応方向とも、像面側走査レンズ11bの中心位置の変化を抑制できる。
また、上記実施形態において、前記画素クロック生成回路215は、光検知センサ18aの出力信号と光検知センサ18bの出力信号とから、光検知センサ18aと光検知センサ18bとの間を光束が走査するのに要した時間を求め、その時間に予め設定されている数のパルスが収まるように画素クロック信号の基準周波数を再設定しても良い。
また、上記実施形態では、前記第1受光部181の形状が長方形の場合について説明したが、これに限定されるものではなく、検知用光束が通過する2辺がs方向に平行な形状であれば良い。
また、上記実施形態では、前記第2受光部182の形状が平行四辺形の場合について説明したが、これに限定されるものではなく、検知用の光束が通過する2辺がm方向に対して傾斜している形状であれば良い。
また、上記実施形態では、光源ユニット14が40個の発光部を有する場合について説明したが、これに限定されるものではない。
また、上記実施形態において、前記液晶偏向素子20に代えて、回動可能な非平行平板やガルバノミラーを用いても良い。要するに、走査制御装置22によって、副走査ずれ量がほぼ0となるように入射光を副走査対応方向に関して偏向することができれば良い。
また、上記実施形態において、画像データをシフトするのに代えて、駆動対象の発光部を副走査対応方向に関して異なる位置にある他の発光部に変更しても良い。
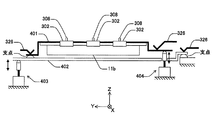
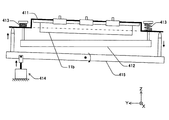
図29には、像面側走査レンズ11bが前記板金部材301とは異なる板金部材401に保持され、該板金部材401がベース部材402に載置されている場合が示されている。そして、この場合は、像面側走査レンズ11bの光軸に対して主走査方向の一側に支点を有し、ベース部材402を板金部材401とともに傾斜させる駆動機構403と、像面側走査レンズ11bの光軸に対して主走査方向の他側に支点を有し、板金部材401をベース部材402に対して傾斜させる駆動機構404とを備えている。
この場合に、例えば、図30(A)〜図30(D)に示されるように、先ず駆動機構404を用いて像面側走査レンズ11bの右端部がLだけ上昇するように板金部材401を傾斜させ、次に駆動機構403を用いて像面側走査レンズ11bの左端部がLだけ下降するようにベース部材402と板金部材401を傾斜させると、像面側走査レンズ11bにおける長手方向の中心の副走査方向位置を変位させることなく、像面側走査レンズ11bの傾きを調整することができる。
また、このとき、板金部材401は、両端部が支持されているので、像面側走査レンズ11bの中心に回転調整の支点がある従来の方式のように、自由端側が振動の影響を受けたり、走査線曲がりが発生することはない。
各駆動機構は、一例として図31(A)に示されるように、駆動対象物に接触している接触部材405と、該接触部材405を副走査方向に移動させる駆動装置406とを含み、一例として図31(B)に示されるように、接触部材405と駆動対象物との接触は、像面側走査レンズ11bの光軸に平行な線接触である。この場合には、像面側走査レンズ11bが光軸方向に倒れるのを防止できる。
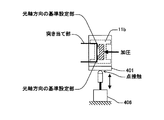
なお、像面側走査レンズ11bに、光軸方向に関する位置決め用の基準設定部が、副走査方向に分離して複数設けられている場合、あるいは副走査方向に長い形状である場合には、一例として図32に示されるように、接触部材405と駆動対象物との接触は、点接触であっても良い。この場合は、基準設定部に圧力をかけて、突き当て部に押しつけることにより像面側走査レンズ11bが光軸方向に倒れるのを防止することができる。
ところで、接触部材と駆動対象物との接触を線接触にすると、基準設定部での抵抗が小さく、傾き調整時の像面側走査レンズ11bの動きがスムーズであるという利点を有するが、駆動機構が傾くと像面側走査レンズ11bも光軸方向に傾くおそれがある。一方、接触部材と駆動対象物との接触を点接触にすると、像面側走査レンズ11bの光軸方向への傾きは発生しないが、基準設定部での抵抗が大きく、傾き調整時の像面側走査レンズ11bの動きがスムーズではない。
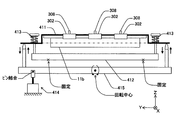
図33には、像面側走査レンズ11bが、前記板金部材301に代えて、主走査方向の両端部に、副走査方向に関する位置が像面側走査レンズ11bの中心と一致し、主走査方向に延設された延設面を有する板金部材411に保持されている場合が示されている。そして、板金部材411の各延設面は、ベース部材412のばね413によって副走査方向に付勢されている。板金部材411の各延設面は、さらにリンク部材415に支持されている。また、この場合は、像面側走査レンズ11bの光軸に平行で、リンク部材415の中心を通り、主走査方向に関する位置が像面側走査レンズ11bの中心と一致する軸まわりにリンク部材415を回動させる駆動機構414を備えている。ここでは、リンク部材415と駆動機構414とはピン結合されている。また、ベース部材412は、高い剛性を有し、ハウジング22に固定されている。
この場合に、駆動機構414を用いてリンク部材415を傾斜させると、一例として図34に示されるように、像面側走査レンズ11bにおける長手方向の中心の副走査方向位置を変位させることなく、像面側走査レンズ11bの傾きを調整することができる。なお、駆動機構414を用いてリンク部材415を傾斜させても、ベース部材412はそのままである。
また、この場合においても、板金部材411は、両端部が支持されているので、像面側走査レンズ11bの中心に回転調整の支点がある従来の方式のように、自由端側が振動の影響を受けたり、走査線曲がりが発生することはない。
さらに、この場合は、駆動機構の数を1つとすることができる。
図35には、像面側走査レンズ11bが前記板金部材301とは異なる板金部材421に保持され、該板金部材421の主走査方向における両端部がベース部材422に固定されている場合が示されている。そして、この場合は、主走査方向に関する位置が像面側走査レンズ11bの中心と一致する支点を有し、ベース部材422を傾斜させる駆動機構423を備えている。
この場合に、駆動機構424を用いてベース部材422を傾斜させると、一例として図36に示されるように、像面側走査レンズ11bにおける長手方向の中心の副走査方向位置を変位させることなく、像面側走査レンズ11bの傾きを調整することができる。
また、この場合は、ベース部材422が高い剛性を有しているため、主走査方向の中央に回転調整の支点があっても、自由端側が振動の影響を受けたり、走査線曲がりが発生することはない。
さらに、この場合は、駆動機構の数を1つとすることができる。
なお、上記実施形態では、画像形成装置としてレーザプリンタ1000の場合について説明したが、これに限定されるものではない。要するに、光走査装置1010を備えた画像形成装置であれば、結果として、安定して高品質の画像を形成することが可能となる。
例えば、レーザ光によって発色する媒体(例えば、用紙)に直接、レーザ光を照射する画像形成装置であっても良い。
また、像担持体として銀塩フィルムを用いた画像形成装置であっても良い。この場合には、光走査により銀塩フィルム上に潜像が形成され、この潜像は通常の銀塩写真プロセスにおける現像処理と同等の処理で可視化することができる。そして、通常の銀塩写真プロセスにおける焼付け処理と同等の処理で印画紙に転写することができる。このような画像形成装置は光製版装置や、CTスキャン画像等を描画する光描画装置として実施できる。
また、例えば、図37に示されるように、複数の感光体ドラムを備えるカラープリンタ2000であっても良い。
このカラープリンタ2000は、4色(ブラック、シアン、マゼンタ、イエロー)を重ね合わせてフルカラーの画像を形成するタンデム方式の多色カラープリンタであり、光走査装置2010、4個の感光体ドラム(2030a、2030b、2030c、2030d)、4個のクリーニングユニット(2031a、2031b、2031c、2031d)、4個の帯電チャージャ(2032a、2032b、2032c、2032d)、4個の現像ローラ(2033a、2033b、2033c、2033d)、4個のトナーカートリッジ(2034a、2034b、2034c、2034d)、転写ベルト2040、定着ローラ2050、給紙コロ2054、レジストローラ対2056、排紙ローラ2058、給紙トレイ2060、排紙トレイ2070、通信制御装置2080、及び上記各部を統括的に制御するプリンタ制御装置2090などを備えている。
光走査装置2010は、一例として図38及び図39に示されるように、2個の光源ユニット(2200a、2200b)、2個の開口板(2201a、2201b)、2個の光束分割プリズム(2202a、2202b)、ポリゴンミラー2104、4個の液晶偏向素子(2203a、2203b、2203c、2203d)、4個のシリンダレンズ(2204a、2204b、2204c、2204d)、4個のfθレンズ(2105a、2105b、2105c、2105d)、8個の走査用ミラー(2106a、2106b、2106c、2106d、2108a、2108b、2108c、2108d)、4個のトロイダルレンズ(2107a、2107b、2107c、2107d)、8個の光検知センサ(2205a1、2205b1、2205c1、2205d1、2205a2、2205b2、2205c2、2205d2)、8個の光検知用ミラー(2207a1、2207b1、2207c1、2207d1、2207a2、2207b2、2207c2、2207d2)、及び不図示の走査制御装置などを備えている。そして、これらは、ハウジング2300(図38では図示省略、図39参照)の中の所定位置に組み付けられている。なお、図39では、光検知センサ及び光検知用ミラーは、一部のみが見えている。
感光体ドラム2030a、帯電チャージャ2032a、現像ローラ2033a、トナーカートリッジ2034a、クリーニングユニット2031a、液晶偏向素子2203a、シリンダレンズ2204a、fθレンズ2105a、走査用ミラー2106a、トロイダルレンズ2107a、走査用ミラー2108a、光検知センサ2205a1、光検知センサ2205a2、光検知用ミラー2207a1、光検知用ミラー2207a2は、組として使用され、ブラックの画像を形成する画像形成ステーション(以下では、便宜上「Kステーション」ともいう)を構成する。
感光体ドラム2030b、帯電チャージャ2032b、現像ローラ2033b、トナーカートリッジ2034b、クリーニングユニット2031b、液晶偏向素子2203b、シリンダレンズ2204b、fθレンズ2105b、走査用ミラー2106b、トロイダルレンズ2107b、走査用ミラー2108b、光検知センサ2205b1、光検知センサ2205b2、光検知用ミラー2207b1、光検知用ミラー2207b2は、組として使用され、シアンの画像を形成する画像形成ステーション(以下では、便宜上「Cステーション」ともいう)を構成する。
感光体ドラム2030c、帯電チャージャ2032c、現像ローラ2033c、トナーカートリッジ2034c、クリーニングユニット2031c、液晶偏向素子2203c、シリンダレンズ2204c、fθレンズ2105c、走査用ミラー2106c、トロイダルレンズ2107c、走査用ミラー2108c、光検知センサ2205c1、光検知センサ2205c2、光検知用ミラー2207c1、光検知用ミラー2207c2は、組として使用され、マゼンタの画像を形成する画像形成ステーション(以下では、便宜上「Mステーション」ともいう)を構成する。
感光体ドラム2030d、帯電チャージャ2032d、現像ローラ2033d、トナーカートリッジ2034d、クリーニングユニット2031d、液晶偏向素子2203d、シリンダレンズ2204d、fθレンズ2105d、走査用ミラー2106d、トロイダルレンズ2107d、走査用ミラー2108d、光検知センサ2205d1、光検知センサ2205d2、光検知用ミラー2207d1、光検知用ミラー2207d2は、組として使用され、イエローの画像を形成する画像形成ステーション(以下では、便宜上「Yステーション」ともいう)を構成する。
各光源ユニットはいずれも、前記光源ユニット14と同様な構成を有している。そして、ここでは、各光源ユニットは、ハウジング2300の+Y側の端部近傍に配置されている。
光源ユニット2200aから射出され、開口板2201aの開口部を通過した光束は、光束分割プリズム2202aでKステーション用の光束とCステーション用の光束とに分割される。また、光源ユニット2200bから射出され、開口板2201bの開口部を通過した光束は、光束分割プリズム2202bでMステーション用の光束とYステーション用の光束とに分割される。
分割された各光束は、対応する液晶偏向素子及びシリンダレンズを介して共通のポリゴンミラー2104に入射する。ポリゴンミラー2104で偏向された各光束は、対応するfθレンズ、走査用ミラー、及びトロイダルレンズを介して、対応する感光体ドラムを照射する。
各光検知センサはいずれも、前記光検知センサ18aと同様なセンサである。
走査用ミラー2108aで反射された書き込み開始前の光束の一部は、光検知用ミラー2207a1で反射され、検知用光束として光検知センサ2205a1に入射する。また、走査用ミラー2108aで反射された書き込み終了後の光束の一部は、光検知用ミラー2207a2で反射され、検知用光束として光検知センサ2205a2に入射する。
走査用ミラー2108bで反射された書き込み開始前の光束の一部は、光検知用ミラー2207b1で反射され、検知用光束として光検知センサ2205b1に入射する。また、走査用ミラー2108bで反射された書き込み終了後の光束の一部は、光検知用ミラー2207b2で反射され、検知用光束として光検知センサ2205b2に入射する。
走査用ミラー2108cで反射された書き込み開始前の光束の一部は、光検知用ミラー2207c1で反射され、検知用光束として光検知センサ2205c1に入射する。また、走査用ミラー2108cで反射された書き込み終了後の光束の一部は、光検知用ミラー2207c2で反射され、検知用光束として光検知センサ2205c2に入射する。
走査用ミラー2108dで反射された書き込み開始前の光束の一部は、光検知用ミラー2207d1で反射され、検知用光束として光検知センサ2205d1に入射する。また、走査用ミラー2108dで反射された書き込み終了後の光束の一部は、光検知用ミラー2207d2で反射され、検知用光束として光検知センサ2205d2に入射する。
各トロイダルレンズは、いずれも上記実施形態における像面側走査レンズ11bと同様に、両端部近傍が支持部材に支持されている。また、各トロイダルレンズには、いずれも上記実施形態と同様な複数の調整機構が設けられている。
走査制御装置は、前記走査制御装置22と同様にして、各感光体ドラムにおける書込開始のタイミングを検出する。
また、走査制御装置は、前記走査制御装置22と同様にして、各光検知センサの出力信号に基づいて、各感光体ドラムにおける副走査ずれ情報及び走査線の傾き情報を取得する。
そして、走査制御装置は、各感光体ドラムにおける副走査ずれ量がほぼ0となるように各液晶偏向素子に電圧を印加する。
また、走査制御装置は、取得した各感光体ドラムにおける走査線の傾き情報に応じて、複数の調整機構を制御し、走査線の状態が出荷時の状態と同じになるように各トロイダルレンズの傾き調整を行う。このとき、Kステーションを基準とし、Kステーションでの走査線の傾き情報と他の画像形成ステーションでの走査線の傾き情報とが一致するように、他の画像形成ステーションにおけるトロイダルレンズの傾き調整を行っても良い。
また、走査制御装置は、前記走査制御装置22と同様に、副走査ずれ量が感光体ドラムにおける走査線の間隔の1/2以上の場合は、副走査ずれが相殺される方向に、対応する画像データをシフトする。
そこで、光走査装置2010は、前記光走査装置1010と同様な効果を得ることができる。
そして、カラープリンタ2000は、光走査装置2010を備えているため、前記レーザプリンタ1000と同様な効果を得ることができる。また、画像の色ずれを低減することができる。
なお、このカラープリンタ2000において、光走査装置を1色毎に設けても良いし、2色毎に設けても良い。
11a…偏向器側走査レンズ(走査光学系の一部)、11b…像面側走査レンズ(走査レンズ)、13…ポリゴンミラー(偏向器)、14…光源ユニット、18a…光検知センサ(第1のビーム検知センサ)、18b…光検知センサ(第2のビーム検知センサ)、22…走査制御装置(制御装置)、100…2次元アレイ、308…調整ねじ(第3の調整機構)、315…ステッピングモータ(第1の調整機構の一部)、320…支持部(第1の調整機構の一部)、340…ステッピングモータ(第2の調整機構の一部)、342…支持部(第2の調整機構の一部)、401…板金部材(保持部材)、402…ベース部材、403…駆動機構、404…駆動機構、405…接触部材、406…駆動装置、411…板金部材(保持部材)、412…ベース部材、413…ばね(弾性部材)、414…駆動機構、415…リンク部材、421…板金部材(保持部材)、422…ベース部材、423…駆動機構、1000…レーザプリンタ(画像形成装置)、1010…光走査装置、1030…感光体ドラム(像担持体)、1050…通信制御装置(通信装置)、2000…プリンタ(画像形成装置)、2010…光走査装置、2030a,2030b,2030c,2030d…感光体ドラム(像担持体)、2080…通信制御装置(通信装置)、2104…ポリゴンミラー(偏向器)、2105a〜2105d…fθレンズ(走査光学系の一部)、2107a〜2107d…トロイダルレンズ(走査レンズ)、2200a…光源ユニット、2200b…光源ユニット、2205a1〜2205d1…光検知センサ(第1のビーム検知センサ)2205a2〜2205d2…光検知センサ(第2のビーム検知センサ)。