自動二輪車や水上バイク、電動自転車等の各種移動体に用いられる荷重センサには小型化が要求される。小型の荷重センサとして、磁歪式荷重センサが実用化されている。磁歪式荷重センサは、荷重が加えられる部材の磁気特性の変化を電圧の変化に変換し、その電圧の変化に基づいて荷重を検出する。
圧縮荷重だけでなく引っ張り荷重も検出することができる磁歪式荷重センサが、特許文献1に開示されている。図26に、特許文献1の磁歪式荷重センサ1200を示す。荷重センサ1200は、固定台1202上に設置されたホルダ1203内に上下動可能に配置されている。
荷重センサ1200は、検出ロッド1208と、検出ロッド1208を磁化するためのコイル(不図示)と、これらを収容するケース1207とを有する。検出ロッド1208の上端は、ケース1207の上端から上方へ突出している。
ホルダ1203の内周面には、フランジ状のストッパ部1203aが形成されており、このストッパ部1203aよりも下方に荷重センサ1200が配置されている。また、ストッパ部1203aよりも上方には、ロッド1209が配置されている。ロッド1209の上端部は、ホルダ1203から突出しており、ジョイント1210と接合されている。
荷重センサ1200は、ホルダ1203内の下部に設けられた第1のばね1205によって上方に付勢されている。また、ロッド1209は、ホルダ1203内の上部に設けられた第2のばね1206によって下方に付勢されており、ロッド1209の下端は、スペーサ1211を介して検出ロッド1208の上端に当接して検出ロッド1208を下方へ押圧している。
第1のばね1205のセット荷重P1は、第2のばね1206のセット荷重P2よりも大きく設定されている(つまりP1>P2)。そのため、ロッド1209に外部荷重が印加されていない状態(無荷重状態)では、荷重センサ1200は、図示しているように、そのケース1207の上面がストッパ部1203aの下面に当接して静止している。従って、無荷重状態では、荷重センサ1200の検出ロッド1208には第2のばね1206のセット荷重P2が圧縮力として作用している。
上記の構成を有する荷重センサ1200では、第2のばね1206による予荷重が圧縮荷重として常に検出ロッド1208に与えられている。ロッド1209に外部から圧縮方向の荷重が加えられると、検出される圧縮荷重が増加する。一方、ロッド1209に外部から引っ張り方向の荷重が加えられると、検出される圧縮荷重が減少する。つまり、この荷重センサ1200では、ロッド1209に外部から加えられる圧縮力は、検出ロッド1208に作用する圧縮荷重の増加分として検出され、ロッド1209に外部から加えられる引っ張り力は、検出ロッド1208に作用する圧縮荷重の減少分として検出される。このように、特許文献1の荷重センサ1200は、圧縮力と引っ張り力の両方を検出することができる。
しかしながら、特許文献1の荷重センサ1200では、予荷重を加える必要があるので、検出に使用できる荷重域が約半分になってしまうという問題があった。また、一般的に、ばねには弾性率の製造ばらつきが10〜20%程度存在するので、セット荷重をセンサごとに調整する必要があり、製造コスト上昇の原因となっていた。さらに、ばねのへたりに起因する予荷重の経時変化により、ゼロ点出力の変動が生じるという問題もあった。
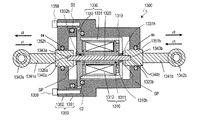
特許文献2には、圧縮力および引っ張り力を検出することができ、且つ、予荷重を加える必要のない磁歪式荷重センサが開示されている。図27に、特許文献2の磁歪式荷重センサ1300を示す。
荷重センサ1300は、コイル1310、磁気回路形成部材1330、棒状部材1320、2つの荷重伝達部材1340a、1340bおよびハウジング1350を備える。
コイル1310は、ボビン1311および導線1312から構成されている。ボビン1311の軸心には貫通孔1310hが形成されている。導線1312は、ボビン1311に巻回されている。
磁気回路形成部材1330は、円筒状の第1のケーシング部材1331と、略円盤形状の第2のケーシング部材1332から構成されている。第1のケーシング部材1331および第2のケーシング部材1332は、磁性材料から形成されており、荷重センサ1300の動作時において、磁気回路として機能する。
第1のケーシング部材1331内に環状の弾性部材1319を介してコイル1310が挿入されている。第1のケーシング部材1331の端部に第2のケーシング部材1332が例えば圧入により結合されている。
第1のケーシング部材1331の一端面の中央には円形の開口部1331hが形成されており、第2のケーシング部材1332の中央には円形の開口部1332hが形成されている。開口部1331hおよび1332hには、それぞれスペーサSPが取り付けられている。
貫通孔1310h、開口部1331hおよび1332hに円柱状の棒状部材1320が挿入されている。棒状部材1320は、磁性材料から形成されているので、荷重センサ1300の動作時において、コイル1310によって磁化される。
棒状部材1320の一端部1320aは開口部1332hから突出しており、棒状部材1320の他端部1320bは開口部1331hから突出している。棒状部材1320は、荷重伝達部材1340aおよび1340bによって支持されている。
荷重伝達部材1340aおよび1340bは、それぞれ円柱形状を有する。また、荷重伝達部材1340aおよび1340bの一端面の中央には、それぞれ円形の凹部1343aおよび1343bが形成されている。棒状部材1320の一端部1320aが荷重伝達部材1340aの凹部1343aに挿入され、棒状部材1320と荷重伝達部材1340aとが接合されている。また、棒状部材1320の他端部1320bが荷重伝達部材1340bの凹部1343bに挿入され、棒状部材1320と荷重伝達部材1340bとが接合されている。
ハウジング1350は、円筒状の第1のハウジング1351と、略円盤状の第2のハウジング1352とを含む。コイル1310、磁気回路形成部材1330、棒状部材1320および荷重伝達部材1340aおよび1340bが第1のハウジング1351内に収容されている。第1のハウジング1351と第2のハウジング1352とは複数のボルト1359によって結合されている。
第1のハウジング1351および第2のハウジング1352には、弾性力を有する樹脂等からなる複数のOリングO1〜O4が取り付けられている。第1のハウジング1351の端面の中央には、円形の開口部1351hが形成されており、荷重伝達部材1340bは、開口部1351h内でOリングO1によって支持されている。また、第2のハウジング1352の中央には、円形の開口部1352hが形成されており、荷重伝達部材1340aは、開口部1352h内でOリングO4によって支持されている。
荷重伝達部材1340aおよび1340bのそれぞれには、棒状部材1320の軸上で荷重センサ1300の外方へ延びるように荷重伝達軸1341aおよび1341bが一体形成されている。さらに、荷重伝達軸1341aおよび1341bのそれぞれの端部には、環状部材1342aおよび1342bが一体形成されている。
棒状部材1320の軸上で2つの環状部材1342aおよび1342bの間に圧縮荷重(方向J1の荷重)が加わると、荷重伝達部材1340aおよび1340bを介して棒状部材1320に圧縮力が作用する。また、棒状部材1320の軸上で2つの環状部材1342aおよび1342bの間に引っ張り荷重(方向J2の荷重)が加わると、荷重伝達部材1340aおよび1340bを介して棒状部材1320に引っ張り力が作用する。
棒状部材1320に圧縮力または引っ張り力が作用すると、逆磁歪効果により棒状部材1320の透磁率が変化し、コイル1310、磁気回路形成部材1330および棒状部材1320から構成されるセンサ構成部のインピーダンスが変化する。その結果、コイル1310に発生する誘導起電力(電圧)が変化する。この電圧変化を、周辺回路によって検出することによって、圧縮荷重および引っ張り荷重の両方を検出することができる。
上述した特許文献2の磁歪式荷重センサ1300は、予荷重を加える必要がないので、使用可能な荷重域を広く取ることができる。
以下、図面を参照しながら本発明の実施形態を説明する。なお、本発明は以下の実施形態に限定されるものではない。
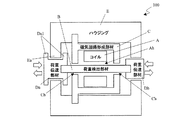
まず、図1を参照しながら、本実施形態における磁歪式荷重センサ100の基本的な構造を説明する。荷重センサ100は、コイルA、荷重検出部材B、磁気回路形成部材C、2つの荷重伝達部材Da、DbおよびハウジングEを備える。荷重伝達部材DaおよびハウジングEは、後述する「制限部材」としても機能する。
荷重検出部材Bおよび磁気回路形成部材Cは、磁性材料から形成されている。これに対し、荷重伝達部材Da、DbおよびハウジングEは、非磁性材料から形成されている。
磁性材料とは、磁場中に置かれたときに磁気を帯びる性質を有する材料である。磁性材料としては、例えば、鉄系材料、鉄クロム系材料、鉄ニッケル系材料、鉄コバルト系材料、鉄ケイ素系材料、鉄アルミニウム系材料、純鉄、パーマロイまたは超磁歪材料、フェライト系ステンレス(例えばSUS430)が用いられる。磁性材料の磁気の帯びやすさは、透磁率によって表される。例えば、鉄の比透磁率(真空の透磁率に対する透磁率の比)は200である。
また、非磁性材料とは、磁性材料以外の材料であり、典型的には、比透磁率が約1の材料である。非磁性材料としては、例えば、オーステナイト系ステンレス(例えばSUS304)、アルミニウムおよび銅が用いられ、これらの比透磁率は、1〜1.01である。
コイルAは、貫通孔Ahを有する。ここでは図示しないが、コイルAは、複数回巻かれた導線を少なくとも含んでいる。
荷重検出部材Bは、棒状の形状を有する。荷重検出部材Bは、コイルAの貫通孔Ahに挿入されている。
磁気回路形成部材Cは、コイルAに流れる電流により発生した磁束が通過する磁気回路を形成する。磁気回路形成部材Cは、コイルAの外周部および両端部を覆っている。磁気回路形成部材Cの両端面の中央には、それぞれ開口部Chが形成されており、荷重検出部材Bの両端部は開口部Chから突出している。
荷重伝達部材DaおよびDbは、外部から印加される圧縮荷重および引っ張り荷重を荷重検出部材Bに伝達する。荷重伝達部材DaおよびDbのうちの一方の荷重伝達部材Daは、荷重検出部材Bの一端部に結合されている。また、他方の荷重伝達部材Dbは、荷重検出部材Bの他端部に結合されている。
ハウジングEは、コイルA、荷重検出部材Bおよび磁気回路形成部材Cを収容する。
荷重伝達部材DaおよびハウジングEは、荷重検出部材Bの磁気回路形成部材Cに対する相対的な位置変化(より具体的には中心軸方向に沿った位置変化)を、磁気回路形成部材Cに荷重伝達部材Da、Dbが接触しない範囲に制限する。図1に示す例では、荷重伝達部材Daが他の部分とは外周形状の異なる異形部Da1を有しており、この異形部Da1がハウジングEの一部(係止部)Eaによって係止されることによって、荷重検出部材Bの位置変化が制限される。
また、図1には示していないが、コイルAから引き出された導線(リード線)は、磁気回路形成部材Cに形成された導線取り出し孔から磁気回路形成部材Cの外部に取り出され、発振回路、電圧検出器(あるいは電流検出器)、整流回路および増幅回路等を含む周辺回路(荷重検出回路)に接続される。
次に、荷重センサ100の動作を説明する。図示しない周辺回路の発振回路によりリード線を介してコイルAに交流電流が供給され、コイルAが駆動される。このとき、コイルAが励磁コイルとして機能し、荷重検出部材Bが磁化される。また、磁気回路形成部材Cは磁気回路として機能する。
図2に、荷重センサ100内に形成される磁気回路を模式的に示す。図2においては、コイルAが駆動されたときの磁界の向きが矢印によって示されている。図2からもわかるように、コイルAが駆動されると、閉路をなすような磁束線(磁気回路)が形成される。
荷重センサ100では、荷重伝達部材DaおよびDbが外部から印加される圧縮荷重および引っ張り荷重を荷重検出部材Bに伝達するので、圧縮力および引っ張り力の両方を検出することが可能になる。荷重伝達部材DaおよびDbの間に圧縮荷重が加えられると、その圧縮荷重が荷重検出部材Bの両端部に伝達される。これにより、荷重検出部材Bに圧縮力が作用する。また、荷重伝達部材DaおよびDbの間に引っ張り荷重が加えられると、その引っ張り荷重が荷重検出部材Bの両端部に伝達される。これにより、荷重検出部材Bに引っ張り力が作用する。荷重検出部材Bに圧縮力または引っ張り力が作用すると、逆磁歪効果により荷重検出部材Bの透磁率が変化し、コイルA、荷重検出部材Bおよび磁気回路形成部材Cの集合体(「センサ構成部」と呼ぶ。)のインピーダンスが変化する。その結果、コイルAに発生する誘導起電力(電圧)が変化する。このとき、コイルAは検出コイルとして機能し、コイルAにおける電圧がリード線を介して周辺回路により検出される。検出されたコイルAの電圧変化に基づいて荷重伝達部材DaおよびDbに加えられた荷重が検出される。
本実施形態における磁歪式荷重センサ100では、特許文献1に開示されている荷重センサ1200のようにばねによる予荷重を加える必要はない。そのため、使用可能な荷重域を広く取ることができる。また、予荷重を与えるためのばねのセット荷重を調整する必要がないし、ばねのへたりに起因する予荷重の経時変化によってゼロ点出力の変動が生じるという問題も発生しない。
さらに、本実施形態における荷重センサ100は、荷重検出部材Bの中心軸方向に沿った位置変化(つまり磁気回路形成部材Cに対する相対的な位置の変化)を制限する制限部材を備えている。そのため、荷重検出部材Bの磁気回路形成部材Cに対する相対位置の大きな変化が防止されるので、センサ構成部の磁気特性の変動およびそれに伴うセンサ出力への悪影響を抑制することができる。また、荷重伝達部材DaおよびDbが磁気回路形成部材Cに接触することによる検出不良も防止される。従って、荷重センサ100は、支持部材Eが移動体本体に据え付けられない使用態様においても、信頼性に優れている。
また、制限部材である荷重伝達部材Daおよびハウジング50は、図2からもわかるように、磁気回路の外側に設けられている。このように、制限部材を磁気回路の外側に設けることにより、センサ出力に悪影響を及ぼすことなく(つまり荷重検出部材Bや磁気回路形成部材Cに余分な応力が加えられることなく)荷重検出部材Bの位置変化を制限することができる。
さらに、本実施形態のように、荷重伝達部材Daが異形部Da1を有し、制限部材がこの異形部Da1を係止する係止部Eaを有していると、比較的簡単な構成によって荷重検出部材Bの位置変化をより確実に制限することができる。
なお、本実施形態における磁気回路形成部材Cは、図2に示すように、磁気回路を形成する第1の部分Caと、第1の部分Caから磁気回路よりも外側に延びるように設けられた第2の部分Cbとを有する。以下では、磁気回路を形成する第1の部分Caを「本体部」と呼び、本体部Caから外側に延びる第2の部分Cbを「フランジ部」と呼ぶ。図2では、フランジ部Cbにハッチングを付している。図2に示しているように、ハウジングEは、磁気回路形成部材Cのフランジ部Cbを保持固定する。従って、コイルA、荷重検出部材Bおよび磁気回路形成部材Cを含むセンサ構成部は、磁気回路の外側で支持されている。このように、センサ構成部が磁気回路の外側で支持されていると、センサ出力が振動や衝撃の影響を受けにくい。
また、磁気回路形成部材Cのフランジ部Cbは、磁気回路の外側に位置しているので、フランジ部Cbに他の部材が接触しても、センサ出力への影響は少ない。そのため、制限部材は、磁気回路形成部材Cの本体部Caに荷重伝達部材DaおよびDbが接触しないように荷重検出部材Bの位置制限を行えば、信頼性を向上する効果が得られる。
続いて、制限部材を備える磁歪式荷重センサのより具体的な構造を説明する。
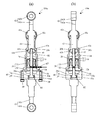
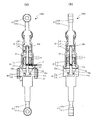
制限部材を備える磁歪式荷重センサの具体的な構造の一例を図3に示す。図3(a)および(b)は、磁歪式荷重センサ100aを模式的に示す断面図であり、いずれも荷重センサ100aの中心軸を通る断面を示している。図3(a)に示されている断面と図3(b)に示されている断面とは、互いに直交する関係にある。
図3(a)および(b)に示す荷重センサ100aは、コイル10、荷重検出部材20、磁気回路形成部材30、荷重伝達部材40、42およびハウジング50を備えている。後述するように、ハウジング50は、荷重伝達部材40の一部を構成する。また、荷重伝達部材40および42は、制限部材としても機能する。
コイル10は、ボビン(巻き枠)11と、ボビン11に巻回された導線12とを含む。ボビン11の軸心には貫通孔が形成されている。コイル10からは、導線12の一部(リード線)12’が引き出されている。
荷重検出部材20は、棒状形状を有し、コイル10の貫通孔に挿入されている。以下では、荷重検出部材20を単に棒状部材と呼ぶ。棒状部材20は、より具体的には、略円柱状である。ただし、棒状部材20の一端部20aは、棒状部材20の他の部分とは異なる外周形状を有しており、より具体的には、他の部分よりも大きな外径を有する。つまり、棒状部材20の一端部20aは、他の部分よりも外径が大きい大径部である。棒状部材20は、磁性材料により形成されているので、荷重センサ100aの動作時において、コイル10によって磁化される。
磁気回路形成部材30は、外周面および底面を有する略円筒形状の第1ケーシング部材31と、略円盤形状の第2ケーシング部材32とから構成されている。第1ケーシング部材31および第2ケーシング部材32は、それぞれ磁性材料から形成されているので、荷重センサ100aの動作時において、第1ケーシング部材31および第2ケーシング部材32のそれぞれは磁気回路として機能する。ただし、第2ケーシング部材32の外周部分32aは、磁気回路よりも外側に延びており、図2に示したフランジ部Cbに相当する。
第1ケーシング部材31内に、コイル10が挿入されている。第1ケーシング部材31の端部に第2ケーシング部材32が結合されており、第1ケーシング部材31と第2ケーシング部材32とで包囲される空間内に、コイル10が収容されている。第1ケーシング部材31と第2ケーシング部材32との結合は、例えば、圧入によって行われる。
第1ケーシング部材31の底面の中央部には、円形の開口部が形成されている。第2ケーシング部材32の中央部にも、円形の開口部が形成されている。棒状部材20の一端部20aおよび他端部20bは、これらの開口部から突出している。
荷重伝達部材40は、ハウジング50と、棒状部材20の一端部(大径部)20aに当接する受け部材41とから構成される。ハウジング50は、2つの空間S1およびS2を有する。一方の空間S1内に、棒状部材20の大部分、磁気回路形成部材30および荷重伝達部材42が収容される。また、他方の空間S2内に、棒状部材20の一端部(大径部)20aおよび受け部材41が収容される。
受け部材41は、略円柱形状を有し、その一端面(棒状部材20側の端面)に凹部41aを有する。受け部材41の凹部41aは、棒状部材20の一端部(大径部)20aと係合している。受け部材41は、非磁性材料から形成されている。
ハウジング50は、棒状部材20の大径部20aの端面(受け部材41と反対側の端面)を係止する係止部50aを有している。棒状部材20の大径部20aは、受け部材41とハウジング50の係止部50aとによって挟み込まれており、そのことによって、棒状部材20の一端部20aと荷重伝達部材40とが結合されている。
また、棒状部材20の一端部(大径部)20aは、上記の構造によって、磁気回路形成部材30に対する相対的な位置の変化を制限されている。具体的には、磁気回路形成部材30に(より厳密には磁気回路形成部材30の本体部に)他の部材が接触しない範囲に大径部20aの位置変化が制限されている。つまり、荷重伝達部材40を構成するハウジング50および受け部材41が協同的に制限部材として機能する。
荷重伝達部材42は、略円柱形状を有し、その一端面(棒状部材20側の端面)に凹部42aを有する。荷重伝達部材42の凹部42aは、棒状部材20の他端部20bと嵌合している。ここでは、棒状部材20の他端部20bと荷重伝達部材42とは、ねじ込みによって結合されており、棒状部材20の他端部20b近傍には、ナット43が螺着されている。なお、棒状部材20の他端部20bの荷重伝達部材42への結合は、接着や溶接、圧入によって行ってもよいし、ピン等の結合部材を用いて行ってもよい。荷重伝達部材42は、非磁性材料から形成されている。
荷重伝達部材42の一端部(棒状部材20側の端部)42bは、他の部分よりも外径が大きい大径部である。ハウジング50は、荷重伝達部材42の大径部42bを係止する係止部50bを有する。また、荷重伝達部材42は、その一部がハウジング50の一端から外方に突出しており、その突出した部分にも大径部42cを有する。ハウジング50の一端部50cは、この大径部42cを係止する係止部として機能する。係止部50bと大径部42bとの間および係止部50cと大径部42cとの間にはそれぞれ所定の間隙が設けられているが、外部から荷重伝達部材42に過大な引っ張り荷重が加えられたときには、大径部42bが係止部50bに当接して係止される。また、外部から荷重伝達部材42に過大な圧縮荷重が加えられたときには、大径部42cが係止部50cに当接して係止される。
棒状部材20の他端部20bは、上記の構造を有する荷重伝達部材42およびハウジング50によって、磁気回路形成部材30に対する相対的な位置の変化を制限されている。具体的には、磁気回路形成部材30に(より厳密には磁気回路形成部材30の本体部に)他の部材が接触しない範囲に他端部20bの位置変化が制限されている。つまり、荷重伝達部材42およびハウジング50が協同的に制限部材として機能する 。
ハウジング50は、既に述べたように、コイル10、棒状部材20、磁気回路形成部材30、受け部材41および荷重伝達部材42を収容する。ハウジング50は、非磁性材料から形成されている。ハウジング50は、磁気回路形成部材30のフランジ部(第2ケーシング部材32の外周部分32a)を挟み込むように保持固定している。第2ケーシング部材32とハウジング50との間には、円環状の弾性部材(パッキン)58が設けられている。
なお、図3では、ハウジング50を連続した1つの部材として図示しているが、実際には、ハウジング50はそれぞれが所定の形状を有する複数の部材から構成されており、ハウジング50を構成する複数の部材は、例えば図示しているようなボルト59によって互いに結合されている。
荷重センサ100aは、さらに、荷重センサ100aを外部と連結するための連結部材61および62を備える。連結部材61および62は、荷重センサ100の両端部に設けられている。
連結部材61は、ハウジング50に接合された荷重伝達軸61aと、荷重伝達軸61aの端部に設けられた環状部材61bとを有する。つまり、連結部材61は、荷重伝達部材40に直接結合されている。連結部材62は、荷重伝達部材42に接合された荷重伝達軸62aと、荷重伝達軸62aの端部に設けられた環状部材62bとを有する。つまり、連結部材62は、荷重伝達部材42に直接結合されている。連結部材61のハウジング50への接合や、連結部材62の荷重伝達部材42への接合は、ねじ込みや接着、溶接、圧入などによって行われる。なお、連結部材61および62は、荷重伝達部材40および42に他の部材を介して間接に結合されていてもよい。また、連結部材61および62を荷重伝達部材40および42に直接結合する場合、連結部材61および62は荷重伝達部材40および42のそれぞれと一体に形成されていてもよい。
上述したように、磁歪式荷重センサ100aは、棒状部材20の中心軸方向に沿った位置変化を制限する制限部材(具体的にはハウジング50、受け部材41および荷重伝達部材42)を備えている。そのため、棒状部材20の磁気回路形成部材30に対する相対位置の変化が制限される(つまり大きな位置変化が防止される)ので、センサ構成部の磁気特性の変動およびそれに伴うセンサ出力への悪影響を抑制することができる。また、他の部材(例えば受け部材41や荷重伝達部材42)が磁気回路形成部材30に接触することによる検出不良も防止される。従って、磁歪式荷重センサ100aは、ハウジング50が移動体本体に据え付けられない使用態様においても、信頼性に優れている。
本実施形態における荷重センサ100aは、棒状部材20の一端部20a側で位置制限を行う制限部材(ハウジング50および受け部材41)と、他端部20b側で位置制限を行う制限部材(荷重伝達部材42およびハウジング50)とを備えている。つまり、制限部材が棒状部材20の一端部20a側と他端部20b側の両方に設けられている。そのため、荷重センサ100aの使用時に万一棒状部材20が折れたとしても(例えば棒状部材20の大径部20aと荷重伝達部材42の大径部42bとの間や、荷重伝達部材42の大径部42bおよび42cの間において折れたとしても)、折れた棒状部材20が荷重センサ100aから抜け落ちることが防止される。
また、制限部材として機能する部材は、磁気回路の外側に設けられている。このように、制限部材を磁気回路の外側に設けることにより、センサ出力に悪影響を及ぼすことなく(つまり棒状部材20や磁気回路形成部材30に余分な応力が加えられることなく)棒状部材20の位置変化を制限することができる。
さらに、棒状部材20および荷重伝達部材42がそれぞれ大径部20a、42b、42cを有し、制限部材であるハウジング50がこれらの大径部20a、42b、42cを係止する係止部50a、50b、50cを有しているので、比較的簡単な構成によって棒状部材20の位置変化をより確実に制限することができる。
また、荷重センサ100aでは、磁気回路形成部材30が磁気回路よりも外側に延びるように設けられたフランジ部32aを有し、ハウジング50は、このフランジ部32aを保持固定する。従って、コイル10、棒状部材20および磁気回路形成部材30を含むセンサ構成部は、磁気回路の外側で支持されている。そのため、荷重センサ100aでは、センサ出力が振動や衝撃の影響を受けにくい。
さらに、荷重センサ100aでは、既に述べたように、棒状部材20の一端部(大径部)20aは、受け部材41とハウジング50の係止部50aとによって挟み込まれており、そのことによって受け部材41と結合されている。この構造を拡大して図4(a)に示す。
図4(a)に示すように、大径部20aの、受け部材41とは反対側の端面20a1は、ハウジング50の係止部50aに当接し、係止されている。また、大径部20aの、受け部材41側の端面20a2は、略球面形状を有し、受け部材41の凹部41aの底面41a1と当接している。大径部20aの外周面20a3と、凹部41aの内周面41a2との間には、所定の間隙が設けられている。
上記の構成によって棒状部材20の一端部20aと荷重伝達部材40とが結合されていると、棒状部材20をねじるような外力が加えられたときに、棒状部材20が回転し得る。つまり、荷重伝達部材40は、棒状部材20の一端部20aと回転可能に結合された結合部(受け部材41)を含む。従って、棒状部材20にねじれ応力が加わるのが防止される。そのため、ねじれによって棒状部材20に不可逆的なダメージや塑性変形が加えられるのを防止でき、いっそう信頼性が向上する。
図4(a)に例示したように、棒状部材20の、結合部(受け部材41)に接触する端面20a2が略球面形状を有していることが好ましい。端面20a2が略球面形状を有していると、端面20a2と結合部との間での回転抵抗が小さくなる。
なお、棒状部材20の両端部の少なくとも一方が、荷重伝達部材40および/または42に回転可能に結合されていれば、棒状部材20へのねじれ応力の印加を防止するという効果を得ることができ、そのための具体的な構造は、図4(a)に例示したものに限定されるものではない。
例えば、図4(b)に示すように、棒状部材20の受け部材41に接触する端面20a2を平面状とし、その代わりに、受け部材41の棒状部材20に接触する端面41a1が略球面形状を有していてもよい。このような構成であっても、棒状部材20の端面20a2と結合部である受け部材41との間での回転抵抗を小さくすることができる。
あるいは、図5に示すように、棒状部材20の一端部20aが大径部でなくてもよい。図5に示す棒状部材20の一端部20aには、非磁性材料から形成された接続部材48が接合されている。接続部材48の棒状部材20への接合は、圧入やねじ込み、接着などにより行われている。接続部材48は、相対的に外径の小さい小径部48aと、相対的に外径の大きい大径部48bとを有する。
接続部材48の大径部48bの、受け部材41とは反対側の端面48b1は、ハウジング50の係止部50aに当接し、係止されている。また、大径部48bの、受け部材41側の端面48b2は、受け部材41の凹部41aの底面41a1と当接している。大径部48bの外周面48b3と、凹部41aの内周面41a2との間には、所定の間隙が設けられている。
図5に示す例では、ハウジング50、受け部材41に加えて接続部材48が荷重伝達部材40を構成している。図5に示したように、荷重伝達部材40を構成する接続部材48に大径部48bを設けても、棒状部材20の位置変化を制限することができる。
また、図6に示すように、受け部材41を棒状部材20側に付勢する弾性部材57を設けてもよい。弾性部材57は、例えば皿ばねである。この弾性部材57によって、受け部材41は棒状部材20の大径部20aに押し付けられる。この構成では、荷重伝達部材40は、ハウジング50と、受け部材41と、弾性部材57とから構成される。
図6に示した構成では、棒状部材20をねじるような応力(トルク)が一定の大きさ以上になったときに、棒状部材20が回転する。従って、過大なトルクによる棒状部材20の塑性変形を防止できる。また、単に棒状部材20を回転可能にするのではなく、受け部材41を棒状部材20側に付勢する弾性部材57が設けられているので、弾性部材57の弾性率を調整することにより、回転が始まるトルクの大きさ(リミットトルク)を正確に設定することができる。なお、図6には、棒状部材20の受け部材41側の端面20a2が略球面形状を有している場合を例示したが、図4(b)と同様に、棒状部材20の受け部材41側の端面20a2を平面状とするとともに、受け部材41の棒状部材20に接触する端面41a1を略球面形状としてもよい。
図7に、ハウジング50の具体的な構造の一例を示す。図7に示すハウジング50は、第1ハウジング部材51および第2ハウジング部材52と、ホルダ53とによって構成される。第1ハウジング部材51と第2ハウジング部材52とは、ボルト59によって互いに結合されている。ホルダ53は、第1ハウジング部材51と第2ハウジング部材52との間に配置される。
第1ハウジング部材51とホルダ53とによって規定される空間S1内に、棒状部材20の大部分、磁気回路形成部材30および荷重伝達部材42が収容される。また、第2ハウジング部材52とホルダ53とによって規定される空間S2内に、棒状部材20の一端部(大径部)20aおよび受け部材41が収容される。なお、受け部材41を省略し、棒状部材20の大径部20aのみが空間S2に収容されてもよい。その場合には、空間S2の大きさは受け部材41を収容する場合よりも小さく設定され、第2ハウジング部材52およびホルダ53が荷重伝達部材40として機能する。
図7に示すハウジング50では、第1ハウジング部材51とホルダ53とが、磁気回路形成部材30のフランジ部32aを挟み込み、保持固定する。また、ホルダ53の一部や第1ハウジング部材51の一部が、図3に示した係止部50a、50b、50cとして機能することによって、棒状部材20の一端部20aと荷重伝達部材40との結合や、棒状部材20の位置変化の制限が行われる。なお、ハウジング50の具体的な構造は、図7に例示したものに限定されるものではない。
続いて、棒状部材20の好ましい構造を説明する。
磁性体の特性の1つとして、磁気異方性が知られている。磁気異方性とは、磁性体に磁化の容易な方向(磁化容易軸)と困難な方向(磁化困難軸)とが存在する性質をいう。棒状部材20は、形状に由来する磁気異方性(形状磁気異方性)を有しており、その長手方向(中心軸に平行な方向)に磁化されやすい。本願発明者は、棒状部材20の形状磁気異方性と荷重センサ100aのセンサ感度との関係を詳細に検討し、その結果、棒状部材20の表面が棒状部材20の内部とは異なる形状磁気異方性を有していると、荷重センサ100aの圧縮力に対する感度と引っ張り力に対する感度とを均等化し得ることを見出した。
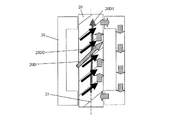
棒状部材20の表面に、内部とは異なる形状異方性を付与するためには、例えば、図8に示すように、棒状部材20の表面に、棒状部材20の中心軸に対して傾斜した方向に延びるストライプ状の複数の溝(以下では「斜め溝」と呼ぶ。)21を設ければよい。斜め溝21は、例えば機械加工により形成することができる。
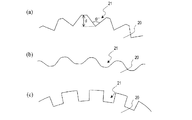
図9(a)〜(c)に、斜め溝21の断面形状の例を示す。斜め溝21の断面は、図9(a)に示すような三角形状であってもよいし、図9(b)に示すような曲線状であってもよい。また、斜め溝21の断面は、図9(c)に示すような台形状(あるいは矩形状)であってもよい。
図10(a)および(b)に、斜め溝21を設けない場合と、棒状部材20の中心軸に直交する方向とのなす角度θ(図8参照)が30°となるように斜め溝21を設けた場合について、荷重とセンサ感度との関係を示す。なお、斜め溝21としては、図9(a)に示したように断面が三角形状で、深さdが0.2mm、頂角θ’が90°のものを設けた。図10(a)および(b)のグラフでは、圧縮方向の荷重を正の値として示し、引っ張り方向の荷重を負の値として示している。また、ここでいうセンサ感度は、センサ構成部の初期インピーダンスZ0に対するインピーダンス変化量ΔZの比(ΔZ/Z0)である。
斜め溝21を設けない場合、図10(a)に示すように、圧縮方向については、荷重の増加に応じてインピーダンスが大きく変化する(ΔZが大きく、ΔZ/Z0も大きい)が、引っ張り方向については、荷重の増加に応じてインピーダンスはそれほど大きく変化しない(ΔZが小さく、ΔZ/Z0も小さい)。つまり、斜め溝21を設けない場合、圧縮力に対する感度に比べ、引っ張り力に対する感度が低い。
これに対し、斜め溝21を設けた場合、図10(b)に示すように、圧縮方向と引っ張り方向の両方について、荷重の増加に応じてインピーダンスがほぼ同程度に変化する(ΔZが同程度であるので、ΔZ/Z0も同程度である)。つまり、斜め溝21を設けた場合、圧縮力に対する感度と引っ張り力に対する感度とをほぼ同程度にすることができる。また、図10(a)と図10(b)との比較から、センサ感度の非直線性およびヒステリシスが改善していることがわかる。
上述したように、斜め溝21を設けることによって、圧縮感度と引っ張り感度とを均等化することができる。斜め溝21を設けない場合に圧縮感度と引っ張り感度とが大きく異なる理由や、斜め溝21を設けることによってこれらを均等化し得る理由は、明らかではないものの以下のように推察される。
図11に、斜め溝21が設けられていない場合の棒状部材20の磁化方向の合力ベクトル20Dを示す。図11には、磁気回路における磁束の流れも示している。棒状部材20の磁化方向の合力ベクトル20Dは、図11に示すように、棒状部材20の中心軸に対してわずかに傾斜している。棒状部材20が引っ張り力によって伸びると、磁化方向の合力ベクトル20Dは、棒状部材20の中心軸とのなす角度がより小さくなるように変化する。また、棒状部材20が圧縮力によって縮むと、磁化方向の合力ベクトル20Dは、棒状部材20の中心軸とのなす角度がより大きくなるように変化する。磁化方向の合力ベクトル20Dは、もともと棒状部材20の中心軸とほぼ平行であるので、棒状部材20に引っ張り力が加えられた場合よりも、棒状部材20に圧縮力が加えられた場合の方が、磁化方向の合力ベクトル20Dが大きく変化しやすく、磁気抵抗も大きく変化しやすい。そのため、斜め溝21が設けられていないと、圧縮感度と引っ張り感度とに大きな差が生じ、圧縮感度に比べて引っ張り感度が低くなる。
図12に、斜め溝21が設けられている場合の棒状部材20の磁化方向の合力ベクトル20Dを示す。棒状部材20の内部における磁化方向の合力ベクトル20D1は、棒状部材20の中心軸に対してわずかに傾斜している。これに対し、棒状部材20の表面における磁化方向20D2は、斜め溝21の延びる方向と平行であり、内部における磁化方向の合力ベクトル20D1とは異なっている。そのため、棒状部材20全体の磁化方向の合力ベクトル20Dは、内部における磁化方向の合力ベクトル20D1と表面における磁化方向20D2の両方によって規定されるが、磁気回路形成部材30との位置関係上、回路の磁気抵抗は棒状部材20の内部よりも表面の影響を受けやすいので、棒状部材20全体の磁化方向の合力ベクトル20Dは、棒状部材20の表面における磁化方向20D2に近いものとなる。従って、棒状部材20の表面における磁化方向20D2が中心軸に対して大きく傾斜するように斜め溝21を形成すれば、棒状部材20全体の磁化方向の合力ベクトル20Dを棒状部材20の中心軸に対して大きく傾斜させることができる。そのため、棒状部材20に圧縮力が加えられた場合と引っ張り力が加えられた場合とで、棒状部材20の伸び/縮みに起因する磁化方向の合力ベクトル20Dの変化の大きさを同程度にすることが可能になる。
上述したように、斜め溝21を設けることによって、圧縮感度と引っ張り感度とを均等化することができ、圧縮力および引っ張り力の両方を好適に検出することが可能になる。また、斜め溝21の角度(中心軸に直交する方向となす角度)θを適切な範囲に設定することにより、センサ感度を高くすることができる。図13(a)に、斜め溝21の角度θとセンサ感度との関係を示す。図13(a)には、センサ感度として、棒状部材20に300Nの荷重を加えたときの圧縮感度、引っ張り感度およびこれらの合計(「感度合計」)を示し、また、圧縮感度の引っ張り感度に対する比(圧縮感度/引っ張り感度)も示している。
図13(a)からわかるように、圧縮感度、引っ張り感度および感度合計のいずれも、斜め溝21の角度θが大きくなるにつれて増加し、角度θが35°を超えると減少する。つまり、圧縮感度、引っ張り感度および感度合計のいずれも35°付近にピークを有する。図13(a)に示したグラフを、その横軸の目盛りを細分化して図13(b)に示す。圧縮力および引っ張り力の検出を好適に行う観点からは、感度合計が0.20以上であることが好ましい。図13(b)からわかるように、斜め溝21の角度θが14.2°以上65.5°以下であると、感度合計を0.20以上にすることができる。
なお、ここでは、棒状部材20の表面に溝21が設けられた構造を例示したが、棒状部材20の表面に内部と異なる形状磁気異方性を付与する手段は、溝21に限定されるものではない。例えば、図14(a)に示すように、棒状部材20の表面に、棒状部材20の中心軸に対して傾斜した方向に延びるストライプ状のめっきパターン22を形成してもよい。めっきパターン22は、複数のめっき層22aから構成されており、各めっき層22aは、棒状部材20の中心軸に対して傾斜した方向に延びている。めっき層22aは、棒状部材20の材料とは異なる磁性材料から形成されている。また、棒状部材20を非磁性材料から形成し、その表面に磁性材料から形成されためっき層22aを設けてもよい。
あるいは、図14(b)に示すように、棒状部材20の表面に、棒状部材20の中心軸に対して傾斜した方向に延びるストライプ状の複数の磁性薄帯23を貼付してもよい。各磁性薄帯23は、棒状部材20の材料とは異なる磁性材料から形成されている。また、棒状部材20を非磁性材料から形成し、その表面に磁性材料から形成された磁性薄帯23を貼付してもよい。
棒状部材20の表面に、図14(a)に示すようなめっきパターン22や、図14(b)に示すような磁性薄帯23を設けた場合にも、棒状部材20の表面における磁化方向がめっきパターン22や磁性薄帯23の延びる方向と一致するので、溝21を設けた場合と同様の効果が得られる。また、溝21を設けた場合と同様に、めっきパターン22や磁性薄帯23が棒状部材20の中心軸に直交する方向と14.2°以上65.5°以下の角度をなしていると、圧縮感度と引っ張り感度の合計を大きく(具体的には0.20以上に)することができる。
上述したように、棒状部材20の中心軸に対して傾斜した方向に延びる溝21やめっきパターン22、磁性薄帯23を設けることによって棒状部材20の表面に形状磁気異方性を付与した場合、棒状部材20にねじれ応力が加わると、圧縮力や引っ張り力が加えられたときと同様にインピーダンスが変化してセンサ出力が変動してしまう。そのため、図4〜図6に例示したようなねじれ応力の印加を防止し得る構造は、棒状部材20の表面に斜め溝21などを設ける場合に特に効果が大きい。
続いて、本実施形態における磁歪式荷重センサ100のより具体的な構造の他の例を図15〜図22を参照しながら説明する。
図3に示した荷重センサ100aでは、その両端部に連結部材61および62が設けられているが、必ずしも両方の端部に連結部材を設ける必要はない。また、図3に示した荷重センサ100aでは、棒状部材20の両端部に荷重伝達部材40および42が結合されているが、必ずしも棒状部材20の両方の端部に対応した荷重伝達部材を設ける必要はない。
図15に示す磁歪式荷重センサ100bは、その一端部にのみ連結部材62を備えている点において、図3に示した荷重センサ100aと異なっている。荷重センサ100bの連結部材が設けられていない方の端部(ここではハウジング50の端部)は、移動体本体1に固定されている。この構成においては、ハウジング50および受け部材41は、棒状部材20の一端部20aに荷重を伝達するわけではない。つまり、ハウジング50および受け部材41は、荷重伝達部材としては機能しない。そのため、荷重センサ100bは、棒状部材20の他端部20bにのみ荷重伝達部材42が結合されている点においても図3に示した荷重センサ100aと異なっている。このように、ハウジング50が移動体本体1に据え付けられていても、荷重センサ100bは圧縮力および引っ張り力を好適に検出することができる。
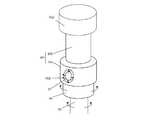
また、棒状部材20の位置制限を行うための構造は、図3に例示した構造に限定されるものではない。図16(a)および(b)に示す磁歪式荷重センサ100cでは、ハウジング50が棒状部材20の一端部(大径部ではない)20aに嵌合するような凹部50bを有しており、棒状部材20の一端部20aがハウジング50に接合されることによって、位置制限が行われている。つまり、図3に示した荷重センサ100aでは、棒状部材20の一端部20a側ではハウジング50および受け部材41が協同的に制限部材として機能するのに対し、図16に示す荷重センサ100cでは、棒状部材20の一端部20a側ではハウジング50のみが制限部材として機能する。また、ハウジング50は、連結部材61に印加される荷重を棒状部材20の一端部20aに伝達する荷重伝達部材としても機能する。棒状部材20の一端部20aのハウジング50への接合は、例えばねじ込みや接着、圧入によって行われる。ねじ込みによって接合を行う場合、棒状部材20の一端部20aに形成されるおねじ部は、他の部分と外周形状の異なる異形部であり、ハウジング50の凹部50bに形成されるめねじ部は、異形部であるおねじ部を係止する係止部である。
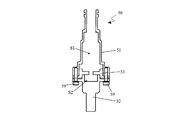
また、図16に示す荷重センサ100cでは、荷重伝達部材42は、棒状部材20の他端部20bと回転可能に結合された結合部を含む。以下、この構造を図17も参照しながらより具体的に説明する。図17は、荷重センサ100cにおける棒状部材20の他端部20b近傍を拡大して示す図である。
棒状部材20の他端部20bは、棒状部材20の中央部よりも大きな外径を有する大径部である。荷重センサ100cの荷重伝達部材42は、棒状部材20の他端部(大径部)20bに当接する受け部材48と、棒状部材20の大径部20bと連結部材62とを接続するための接続部材44とから構成される。
接続部材44は、その一端部で連結部材62と結合されている。接続部材44は、その内部に、棒状部材20の大径部20bおよび受け部材48を収容するための空間S3を有する。
受け部材48は、略円柱形状を有し、その一端面(棒状部材20側の端面)に凹部48aを有する。受け部材48の凹部48aは、棒状部材20の大径部20bと係合している。
また、接続部材44は、棒状部材20の大径部20bの端面(受け部材48と反対側の端面)20b1を係止する係止部44aを有している。棒状部材20の大径部20bは、受け部材48と接続部材44の係止部44aとによって挟み込まれており、そのことによって、棒状部材20の大径部20bと荷重伝達部材42とが結合されている。図17に示すように、大径部20bの、受け部材48側の端面20b2は、略球面形状を有し、受け部材48の凹部48aの底面48a1と当接している。大径部20bの外周面20b3と、凹部48aの内周面48a2との間には、所定の間隙が設けられている。
上記の構成によって棒状部材20の他端部20bと荷重伝達部材42とが結合されていると、棒状部材20をねじるような外力が加えられたときに、棒状部材20が回転し得る。このように、荷重センサ100cの荷重伝達部材42は、棒状部材20aの他端部20bと回転可能に結合された結合部(受け部材48)を含む。従って、棒状部材20にねじれ応力が加わるのが防止される。そのため、ねじれによって棒状部材20に不可逆的なダメージや塑性変形が加えられるのを防止でき、いっそう信頼性が向上する。
なお、図16に示した構成では、接続部材44およびハウジング50は、棒状部材20の他端部20b側における制限部材としても機能する。接続部材44は、相対的に外径が大きい2つの大径部44bおよび44cを含んでいる。一方の大径部44bは、ハウジング50内に位置し、ハウジング50は、この大径部44bを係止する係止部50bを有する。また、他方の大径部44cは、ハウジング50の外部に位置し、ハウジング50の一端部50cは、この大径部44cを係止する係止部として機能する。係止部50bと大径部44bとの間および係止部50cと大径部44cとの間にはそれぞれ所定の間隙が設けられているが、外部から荷重伝達部材42に過大な引っ張り荷重が加えられたときには、大径部44bが係止部50bに当接して係止される。また、外部から荷重伝達部材42に過大な圧縮荷重が加えられたときには、大径部44cが係止部50cに当接して係止される。
棒状部材20にねじれ応力が加わるのを防止する機構、すなわち、荷重伝達部材を棒状部材20に対して回転可能に結合する機構(「逃げ機構」と呼ぶ。)は、図4や図17に示した構造に限定されるものではない。図18(a)および(b)に、逃げ機構を含む他の磁歪式荷重センサ100dを示す。
荷重センサ100dが備える棒状部材20の一端部20aは、中央部よりも外径の大きい大径部であり、図4に示した構造と同様の構造により、荷重伝達部材40と回転可能に結合されている。
また、棒状部材20の他端部20bは、第1の接続部材45、第2の接続部材46および第3の接続部材47から構成される荷重伝達部材42に結合されている。第1の接続部材45、第2の接続部材46および第3の接続部材47の構造を図19および図20を参照しながらより具体的に説明する。
第1の接続部材45は、略円柱状であり、相対的に外径の大きい大径部45aおよび45a’と、相対的に外径の小さい小径部45bとを有している。大径部45aには、荷重センサ100dの中心軸方向に延びる孔45cと、中心軸に直交する方向に延びる貫通孔45dとが形成されている。孔45cと貫通孔45dとは、図20に示すように途中で合流している。
第2の接続部材46は、略円柱状であり、相対的に外径の大きい大径部46aと、相対的に外径の小さい小径部46bとを有している。第2の接続部材46には、荷重センサ100dの中心軸方向に延びる貫通孔46cが大径部46aおよび小径部46bの両方にわたって形成されている。この貫通孔46cの内周面には、棒状部材20の他端部20bに形成されたおねじ部(図15では不図示)と螺合するめねじ部が設けられている。つまり、貫通孔46cは、棒状部材20の他端部20bに螺合するねじ孔である。
第3の接続部材47は、棒状(より具体的には略円柱状)であり、第3の接続部材47には、荷重センサ100dの中心軸方向に延びる貫通孔47aが形成されている。貫通孔47aの一部47a1は、第2の接続部材46の小径部46bと嵌合する孔であり、他の部分47a2は、棒状部材20の他端部20bと螺合するねじ孔である。
第1の接続部材45、第2の接続部材46および第3の接続部材47と棒状部材20とは、以下の手順で結合される。まず、図21(a)に示すように、第1の接続部材45の貫通孔45dに、第3の接続部材47が挿入される。つまり、第3の接続部材47は、棒状部材20の中心軸と交差する方向に延びる棒状部材であり、第1の接続部材45は、第3の接続部材(棒状部材)47が挿入される貫通孔45dを有する収容部材である。次に、図21(b)に示すように、棒状部材20に第2の接続部材46を深くねじ込む。
続いて、図22(a)に示すように、第3の接続部材47のねじ孔47a2に棒状部材20をその先端が第3の接続部材47から突出しない程度にねじ込む。その後、図22(b)に示すように、第2の接続部材46を、その小径部46bが第3の接続部材47の孔47a1と嵌合するまでねじ込む。このようにして、荷重伝達部材42と棒状部材20の他端部20bとが結合される。第3の接続部材(棒状部材)47の外周面47bと第1の接続部材(収容部材)45の貫通孔45dの内周面45d1との間で荷重が伝達される。
ここで、第1の接続部材45の貫通孔45dの内径Di1は、第3の接続部材47の直径Di2よりも所定の値だけ大きい(図20参照)。つまり、第3の接続部材47の外周面47bと、第1の接続部材45の貫通孔45dの内周面45d1との間には所定の隙間が設けられている。従って、ねじれ応力が加えられたとき、図23に模式的に示すように、棒状部材20とその他端部20bに螺合された第2の接続部材46および第3の接続部材47とは、ねじれ方向(図23中の左右方向)に幾分回転することができる。また、棒状部材20がねじ孔47a2内で螺進または螺退することによって、棒状部材20は第3の接続部材47に対して回転し得る。そのため、棒状部材20にねじれ応力が加わるのを防止するとともに、ねじれによる定常的な出力誤差の発生を防止することができる。
また、第3の接続部材47と第1の接続部材45との間の隙間は、図23からもわかるように、貫通孔45dのすべての半径方向について設けられている。従って、第3の接続部材47は、ねじれ方向以外の方向(例えば図23の上下方向)についても回転を許容されている。そのため、曲げや同軸ずれによる応力集中を回避することができ、そのような応力集中に起因したセンサ出力の変動を防止することができる。
あるいは、連結部材61および62の少なくとも一方が逃げ機構を有してもよい。例えば、連結部材61および62の環状部材61bおよび62bに球面滑り軸受けを設けることにより、逃げ機構を含む連結部材61および62が得られる。球面滑り軸受けを含む連結部材61および62としては、例えば、「ロッドエンド」という名称で市販されている部材を用いることができる。
(磁歪式荷重センサを用いた荷重検出回路)
図24を参照しながら、磁歪式荷重センサを用いた荷重検出回路の構成を説明する。図24は、磁歪式荷重センサ100を用いた荷重検出回路600の概略構成を示すブロック図である。なお、荷重センサ100は、荷重センサ100a、100b、100cまたは100dであってもよい。
荷重検出回路600は、発振回路610、磁歪式荷重センサ100、温度補償抵抗回路620、電流検出器630A、630B、整流回路650A、650Bおよび増幅回路670を含む。
発振回路610は、発振信号を磁歪式荷重センサ100のコイルAの一端および温度補償抵抗回路620の一端に与える。磁歪式荷重センサ100は、外部からの荷重を検出する。電流検出器630Aは、磁歪式荷重センサ100のコイルAの他端から供給される電流を電圧に変換する。電流検出器630Bは、温度補償抵抗回路620の他端から供給される電流を電圧に変換する。整流回路650Aは、電流検出器630Aから出力される電圧を整流および平滑化する。整流回路650Bは、電流検出器630Bから出力される電圧を整流および平滑化する。増幅回路670は、整流回路650Aの出力電圧と整流回路650Bの出力電圧との差分を増幅する。
図1の荷重伝達部材DaおよびDbの間に加えられる荷重が棒状部材Bの両端に伝達され、荷重検出部材Bに圧縮力または引っ張り力が作用すると、逆磁歪効果により荷重検出部材Bの透磁率が変化し、コイルA、荷重検出部材B、磁気回路形成部材Cからなるセンサ構成部のインピーダンスが変化する。このインピーダンス変化に対応する出力信号が増幅回路670により得られる。このようにして、荷重を電磁気的に検出することができる。
荷重検出回路600の増幅回路670の出力信号は制御部680に与えられる。制御部680はCPU(中央演算処理装置)およびRAM(ランダムアクセスメモリ)等からなる。CPUは、RAMに格納された制御プログラムに従って動作する。この制御部680は、増幅回路670の出力信号に所定の演算を行い、演算結果に基づく制御信号をアクチュエータ690に与える。アクチュエータ690は、制御信号に応答して駆動力を発生する。
(磁歪式荷重センサを用いたシフト荷重検出装置)
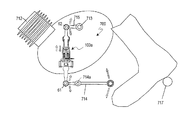
図25を参照しながら、磁歪式荷重センサを用いたシフト荷重検出装置の構成を説明する。図25は、磁歪式荷重センサ100aを用いたシフト荷重検出装置700を模式的に示す図である。
シフト荷重検出装置700は、自動二輪車の内燃機関712近傍に設けられている。シフト荷重検出装置700は、ギヤボックス(不図示)から突出したシフト軸713と、シフト軸713に結合されたシフトロッド715と、ライダーがシフトチェンジを行うためのシフトペダル714とを含んでいる。シフトペダル714は、支持軸714aを中心として揺動可能に設けられており、ライダーの足(ステップ717によって支持されている)によって押し上げまたは押し下げられる。荷重センサ100aの一端部の連結部材61がシフトペダル714に連結されるとともに、荷重センサ100aの他端部の連結部材62がシフトロッド715に連結されることにより、シフトペダル714とシフトロッド715とが荷重センサ100aを介して連結されている。
圧縮力および引っ張り力の両方を検出し得る荷重センサ100aによってシフト荷重を検出することにより、シフトチェンジが確実に行われたかどうかを判定することができる。一般に、シフトチェンジが成功した時は、シフト操作の途中に荷重の減少が見られる。これに対し、シフトチェンジが失敗したときにはシフト操作を解除するまで荷重が減少しない。従って、シフト荷重を検出することにより、シフトチェンジが成功したか否かを判別することが可能になる。
なお、上述した磁歪式荷重センサ100a、100b、100cおよび100dは、自動二輪車に限定されず、滑走艇、電動自転車、水上バイク、電動車椅子等の種々の輸送機器に用いられる。また、輸送機器だけでなく、移動棚等にも用いられる。つまり、磁歪式荷重センサ100a、100b、100cおよび100dは、移動体全般に広く用いられる。