JP2010002373A - Vr型レゾルバ - Google Patents
Vr型レゾルバ Download PDFInfo
- Publication number
- JP2010002373A JP2010002373A JP2008163148A JP2008163148A JP2010002373A JP 2010002373 A JP2010002373 A JP 2010002373A JP 2008163148 A JP2008163148 A JP 2008163148A JP 2008163148 A JP2008163148 A JP 2008163148A JP 2010002373 A JP2010002373 A JP 2010002373A
- Authority
- JP
- Japan
- Prior art keywords
- tooth
- resolver
- phase
- pole piece
- stator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Abstract
【解決手段】極片歯11及び歯21は、これらの歯幅W1と歯幅W2とを同じ幅(W1=W2)に構成する。更に、極片歯11は、その歯幅W1と歯間距離L1とを、W1:L1=1:2となる幅及び長さに構成し、その深さH1を、歯幅W1と深さH1とが、W1:H1=1:2となる深さに構成する。一方、歯21は、その歯幅W2と歯間距離L2とを、W2:H2=1:2となる幅及び長さに構成し、その深さH2を、歯幅W1と深さH2とが、W1:H2=1:2となる深さに構成する。そして、極片歯11の先端部における円周方向の両端部に大きさR1のR(丸み)を設け、歯21の先端部における円周方向の両端部に大きさR2のRを設ける。
【選択図】 図3
Description
例えば、VR(可変リラクタンス)型のレゾルバは、モータ等のアクチュエータの回転軸に回転自在に取り付けられ、回転子と固定子の間のリラクタンスが回転子の位置により変化し、その変化に応じた電圧のレゾルバ信号を出力する。モータ部にレゾルバを設け、そのレゾルバからの多相出力(例えば、3相)をモータを駆動制御するドライブユニット内に取り込む。ドライブユニットでは、取り込んだ多相出力信号を相変換回路により2相出力(SlN、COS)信号に変換し、このアナログの信号をR/Dコンバータ(RDC)でデジタルの信号に変換し、更に、該変換して得られた角度データを補正データにより補正して、最終的なデジタル位置信号を得て、これに基づきアクチュエータを制御している。
この位置検出装置は、励磁巻線と出力巻線とを異なった極数としていずれも固定子鉄心のスロットに納め、励磁巻線の極対数をp1、出力巻線の極対数をp2として、回転子はM個の突極を有する鉄心で巻線を設けない構造において、p1+p2=M、又はp1−p2=±Mとし、励磁巻線を単相とし、出力巻線を2相又は3相とした場合には、回転子の全円周の1/Mの動きを1周期とする正弦波の2相又は3相電圧が出力巻線に誘導されることを利用し、励磁巻線を2相として出力巻線を単相とした場合には、出力巻線に誘導される電圧は、回転子が全円周の1/M動くときに位相が2π変化する正弦波電圧となることを利用して位置を検出する。更に、突極の中央を原点として回転子外周の位置を表す空間角をθ2とするとき、回転子を、回転子形状によるギャップパーミアンス脈動がcos(Mθ2)となるような回転子形状、又はこれに近似した回転子形状に構成している。
また、固定子の極片歯及び回転子の歯の双方の先端部にRを設ける構造としたので、例えば、一方のRの大きさに制限を設けなければいけない場合などに、他方のRの大きさを調整することで、制限のあるRの大きさで一方にのみRを設けた場合と比較して、高調波成分をより低減させることができる構造とすることができる。
このような構成であれば、固定子の極片歯の歯幅と、回転子の歯の歯幅とが異なる場合と比較して、固定子の極片歯と回転子の歯とに対する適切なRの大きさを簡易に設定することができる(例えば、同じ値に設定することができる)。
上記「13[%]±2[%]」は、本発明者らが実験によって得た知見に基づく数値であり、R1/W1=13[%]、R2/W2=13[%]となるR1、R2、W1、W2とすることで、高調波成分を略ゼロにすることができる。また、13[%]±2[%]の範囲内にすることで、位置検出精度に対する誤差を±20[秒]以内に抑えることができる。
上記「13[%]±2[%]」は、本発明者らが実験によって得た知見に基づく数値であり、R1/W1とR2/W2との平均値が13[%]となるR1、R2、W1、W2とすることで、高調波成分を略「0」にすることができる。また、13[%]±2[%]の範囲内にすることで、位置検出精度に対する誤差を±20[秒]以内に抑えることができる。
このような構成であれば、ギャップパーミアンスの変動をより確実に小さくすることができ、各相のコイルから出力されるレゾルバ信号に含まれる高調波成分をより確実に低減することができる。
このような構成であれば、3相、4相又は6相のVR型レゾルバに対して、上記発明1乃至7のVR型レゾルバと同等の作用及び効果を得ることができる。
更に、発明3のVR型レゾルバによれば、発明2の前記効果に加え、固定子の有する各極片歯の歯幅W1と各極片における極片歯間の距離L1とを、W1:L1=1:2となる幅及び長さに構成し、回転子の有する歯の歯幅W2(=W1)と歯間距離L2(=L1)とをW2:L2=1:2となる幅及び長さに構成し、極片歯間の凹部の深さH1を、W1:H1=1:2となる深さに構成し、歯間の凹部の深さH2(=H1)を、W2:H2=1:2となる深さに構成したので、ギャップパーミアンスの変動を、歯先の形状(Rの大きさ)のみに依存させることができるので、適切なRの大きさをより簡易に設定することができるという効果が得られる。
更に、発明5のVR型レゾルバによれば、発明3の前記効果に加え、R1、R2、W1、W2を、R1/W1とR2/W2との平均が13[%]±2[%]の範囲内となる大きさ及び幅としたので、位置検出精度に対する誤差を20[秒]以内に抑えることができるという効果が得られる。
まず、本発明に係る3相VR型レゾルバの構造を図1に基づき説明する。図1は、本発明に係る3相VR型レゾルバの構造を示す平面図である。
本実施の形態に係るVR型レゾルバは、図1に示すように、環状のレゾルバステータ10の内側に、環状のレゾルバロータ20を組み合わせたインナロータタイプのもので、ステータ10は先端部に複数の極片歯11を有する極片(ポール)12を円周方向に等間隔に複数設けると共に各極片12にコイル13を巻回して固定支持されている。前記ロータ20は、ステータ10の極片歯11に対向して円周方向に極片歯と同じピッチで形成された多数の歯21を有してステータ10同心に配し相対回転自在に支持されている。このレゾルバステータ10の電気的に隣り合う極片12のそれぞれの位相が互いに120[°]となるように、レゾルバステータ10の各極片歯11は、レゾルバロータ20の歯21のピッチの整数倍から1/3ピッチずらされている。
いま、レゾルバロータ20が図外のモータロータと同期回転すると、レゾルバロータ20の歯21とレゾルバステータ10の極片歯11との間の空隙(エアギャップ)中のリラクタンスがレゾルバロータ20の位置の変化に応じて変化し、その変化に応じた電流がレゾルバステータ10のコイル巻線13に流れる。その電流を変調信号として検出することにより回転角度位置又は回転速度を検出する。レゾルバロータ20がその1歯分回転すると、レゾルバステータ10側では電気角360[°]相当の変調信号が検出される。
ここで、図2(a)は、理想の検出信号(励磁信号は無視)と、高調波成分を示す検出信号とを示す波形図であり、(b)は、(a)の波形における高調波成分のみを示す波形図である。なお、図2(a)及び(b)において、横軸は電気角度、縦軸は信号レベルを示す。
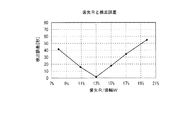
ここで、図3(a)は、極片歯11の構成を説明する図であり、(b)は、歯21の構成を説明する図である。また、図4(a)及び(b)は、極片歯11のみ及び歯21のみにRを設けたときの構成を示す側面図である。また、図5(a)は、極片歯11にのみRを設けたときのR1/W1と高調波成分の大きさとの関係を示す図であり、(b)は、歯21にのみRを設けたときのR2/W2と高調波成分の大きさとの関係を示す図である。
本実施の形態では、具体的に、まず、極片歯11及び歯21は、これらの歯幅W1と歯幅W2とを同じ幅(W1=W2)に構成する。更に、極片歯11は、その歯幅W1と歯間距離L1とを、W1:L1=1:2となる幅及び長さに構成し、その深さH1を、歯幅W1と深さH1とが、W1:H1=1:2となる深さに構成する。
そして、図3(a)及び(b)に示すように、極片歯11の先端部における円周方向の両端部に大きさR1のR(丸み)を設け、歯21の先端部における円周方向の両端部に大きさR2のRを設ける。
ここで、図4(a)に示すように、レゾルバステータ10側の極片歯11の歯先のみに大きさR1のRを設けた場合に、検出信号中の高調波成分と「R1/W1」[%]との関係は、図5(a)に示すようになる。同図(a)においては、歯幅W1を約0.78[mm]として、極片歯11の歯先のRの大きさR1を変えていき、「R1/W1」が8〜20[%]のときの高調波成分を測定した。同図(a)を見ると、13[%](R1≒0.1)を境に、それより小さくなっても大きくなっても高調波成分が大きくなっていっているのが解る。つまり、「R1/W1」が大き過ぎても小さ過ぎても高調波成分をゼロとすることはできない。
ここで、図6は、極片歯11及び歯21の歯先の双方にRを設けたときの構成を示す側面図である。また、図7は、極片歯11及び歯21の歯先の双方にRを設けたときのRA/WAと検出誤差との関係を示す図である。
以下、本実施の形態のVR型レゾルバを、ダイレクトドライブモータ(以下、DDモータという)に適用することを考えて、歯先に設けるRの大きさを設定する。
従って、本実施の形態では、「R1/W1」と「R2/W2」の少なくとも一方が13±2[%]の範囲内となるように、極片歯11及び歯21の歯先の少なくとも一方に大きさR1又はR2のRを設けることとする。
図8に示すように、レゾルバ制御回路は、発振器40aと増幅器(Amp)40bとから構成される励磁回路40と、A〜Cの各相に対応するA相検出抵抗Ra、B相検出抵抗Rb及びC相検出抵抗Rcから構成される電流/電圧変換回路41と、3/2変換回路42と、演算部43と、移相器44とを含んで構成される。
ここで、3相レゾルバの各相の検出信号を、A(θ)、B(θ)、C(θ)とすると、5次までの高調波成分を考慮した各検出信号は、下式(1)〜(3)で表すことができる。
A(θ)=Adc0+Aac1cosθ+Aac2cos2θ+Aac3cos3θ+Aac4cos4θ+Aac5cos5θ
・・・(1)
B(θ)=Bdc0+Bac1cos(θ-120°)+Bac2cos2(θ-120°)+Bac3cos3(θ-120°)+Bac4cos4(θ-120°)+Bac5cos5(θ-120°)
・・・(2)
C(θ)=Cdc0+Cac1cos(θ+120°)+Cac2cos2(θ+120°)+Cac3cos3(θ+120°)+Cac4cos4(θ+120°)+Cac5cos5(θ+120°)
・・・(3)
上式(1)〜(3)において、Adc0、Bdc0、Cdc0は、A相、B相、C相の検出信号に含まれる直流成分であり、Aac1cosθ〜Aac5cos5θ、Bac1cos(θ-120°)〜Bac5cos5(θ-120°)、Cac1cos(θ+120°)〜Cac5cos5(θ+120°)は、A相、B相、C相の検出信号に含まれる1次〜5次の交流成分である。
従って、上式(1)〜(3)に示す、A(θ)、B(θ)、C(θ)を、2相の信号fc(θ)、fs(θ)に変換すると、これらは、下式(4)、(5)で表すことができる。
fc(θ)=3(Aac1cosθ+Aac2cos2θ+Aac4cos4θ)/2 ・・・(4)
fs(θ)=3(Aac1sinθ+Aac2sin2θ+Aac4sin4θ)/2 ・・・(5)
上式(4)及び(5)から、2相に変換された検出信号には、2次と4次の高調波成分が残ることになる。
φ=θ+Δθ ・・・(6)
また、上式(6)において、Δθは、下式(7)となる。
Δθ=tan-1[(Aac2-Aac4)/sin3θ/{Aac1+(Aac2+Aac4)cos3θ}]
・・・(7)
上式(7)に示すΔθは、2次と4次の高調波成分が原因の誤差成分となる。この誤差成分は、特に2次の高調波成分が支配的となっている。
fc(θ)=3(Aac1cosθ)/2 ・・・(8)
fs(θ)=3(Aac1sinθ)/2 ・・・(9)
これにより、上式(7)で示されるΔθを大幅に小さくすることができるので、演算部43において、誤差を補正するためのメモリや回路等を設ける必要がない、または演算部43において誤差の補正演算を行う必要がない。従って、メモリや回路等を設ける必要がないことによるコストの低減、または補正処理演算を省くことができるのでその演算負荷の低減などの効果が得られる。
4相のレゾルバは、先述したように、極片12のそれぞれの位相が互いに90[°]となるように、レゾルバステータ10の各極片歯11を、レゾルバロータ20の歯21のピッチの整数倍から1/4ピッチずらして形成した構成となる。4相のレゾルバは、3相レゾルバに対して、歯のピッチが変更されるだけで新規の構成部が追加される変更とはならないので、3相のレゾルバと各構成部の符号を同じとする。
従って、励磁回路40から、励磁信号sin(ωt)が4相のレゾルバに供給され、DDモータの回転軸が回転すると、まず、A〜D相の各相から回転位置に応じたアナログのレゾルバ信号が出力される。このアナログの4相のレゾルバ信号は、電流/電圧変換回路41において、4相の信号電流から4相の信号電圧へと変換される。そして、差動回路45aにおいて、B相とD相の信号からこれらの差動信号(SIN信号)を生成し、差動回路45bにおいて、A相とC相の信号から、これらの差動信号(COS信号)を生成する。これらSIN信号及びCOS信号は、演算部43に出力される。
ここで、4相レゾルバの各相の検出信号を、A(θ)、B(θ)、C(θ)、D(θ)とすると、5次までの高調波成分を考慮した各検出信号は、下式(10)〜(13)で表すことができる。
A(θ)=Adc0+Aac1cosθ+Aac2cos2θ+Aac3cos3θ+Aac4cos4θ+Aac5cos5θ
・・・(10)
B(θ)=Bdc0+Bac1cos(θ+90°)+Bac2cos2(θ+90°)+Bac3cos3(θ+90°)+Bac4cos4(θ+90°)+Bac5cos5(θ+90°)
・・・(11)
C(θ)=Cdc0+Cac1cos(θ+180°)+Cac2cos2(θ+180°)+Cac3cos3(θ+180°)+Cac4cos4(θ+180°)+Cac5cos5(θ+180°)
・・・(12)
D(θ)=Ddc0+Dac1cos(θ+270°)+Dac2cos2(θ+270°)+Dac3cos3(θ+270°)+Dac4cos4(θ+270°)+Dac5cos5(θ+270°)
・・・(13)
上式(10)〜(13)において、Adc0、Bdc0、Cdc0、Ddc0は、A相、B相、C相、D相の検出信号に含まれる直流成分であり、Aac1cosθ〜Aac5cos5θ、Bac1cos(θ+90°)〜Bac5cos5(θ+90°)、Cac1cos(θ+180°)〜Cac5cos5(θ+180°)、Dac1cos(θ+270°)〜Dac5cos5(θ+270°)は、A相、B相、C相、D相の検出信号に含まれる1次〜5次の交流成分である。
従って、上式(10)〜(13)に示す、A(θ)、B(θ)、C(θ)、D(θ)から、差動回路45aにおいて、A(θ)とC(θ)の差動信号、差動回路45bにおいて、B(θ)とD(θ)の差動信号を生成すると、この差動信号からなる2相の信号fc(θ)、fs(θ)は、下式(14)及び(15)となる。
fc(θ)=A(θ)-C(θ)=2Aac1cosθ+2Aac3cos3θ+2Aac5cos5θ
・・・(14)
fs(θ)=B(θ)-D(θ)=2Aac1cos(θ-180°)+2Aac3cos3(θ-180°)+2Aac5cos5(θ-180°)
・・・(15)
上式(14)及び(15)から、2相に変換された検出信号には、3次と5次の高調波成分が残ることになる。従って、角度演算された誤差を波形にすると3次が支配的な誤差波形が得られる。
fc(θ)=2Aac1cosθ ・・・(16)
fs(θ)=2Aac1cos(θ-180°) ・・・(17)
これにより、誤差の要因となる高調波成分を大幅に小さくすることができるので、演算部43において、誤差を補正するためのメモリや回路等を設ける必要がない、または演算部43において誤差の補正演算を行う必要がない。従って、4相のレゾルバに対しても、メモリや回路等を設ける必要がないことによるコストの低減、または補正処理演算を省くことができるのでその演算負荷の低減などの効果が得られる。
6相のレゾルバは、先述したように、極片12のそれぞれの位相が互いに60[°]となるように、レゾルバステータ10の各極片歯11を、レゾルバロータ20の歯21のピッチの整数倍から1/6ピッチずらして形成した構成となる。6相のレゾルバは、3相レゾルバに対して、歯のピッチが変更されるだけで新規の構成部が追加される変更とはならないので、3相のレゾルバと各構成部の符号を同じとする。
ここで、6相レゾルバの各相の検出信号を、A(θ)、B(θ)、C(θ)、D(θ)、E(θ)、F(θ)とすると、5次までの高調波成分を考慮した各検出信号は、下式(18)〜(23)で表すことができる。
A(θ)=Adc0+Aac1cosθ+Aac2cos2θ+Aac3cos3θ+Aac4cos4θ+Aac5cos5θ
・・・(18)
B(θ)=Bdc0+Bac1cos(θ+60°)+Bac2cos2(θ+60°)+Bac3cos3(θ+60°)+Bac4cos4(θ+60°)+Bac5cos5(θ+60°)
・・・(19)
C(θ)=Cdc0+Cac1cos(θ+120°)+Cac2cos2(θ+120°)+Cac3cos3(θ+120°)+Cac4cos4(θ+120°)+Cac5cos5(θ+120°)
・・・(20)
D(θ)=Ddc0+Dac1cos(θ+180°)+Dac2cos2(θ+180°)+Dac3cos3(θ+180°)+Dac4cos4(θ+180°)+Dac5cos5(θ+180°)
・・・(21)
E(θ)=Edc0+Eac1cos(θ+240°)+Eac2cos2(θ+240°)+Eac3cos3(θ+240°)+Eac4cos4(θ+240°)+Eac5cos5(θ+240°)
・・・(22)
F(θ)=Fdc0+Fac1cos(θ+300°)+Fac2cos2(θ+300°)+Fac3cos3(θ+300°)+Fac4cos4(θ+300°)+Fac5cos5(θ+300°)
・・・(23)
上式(18)〜(23)において、Adc0、Bdc0、Cdc0、Ddc0、Edc0、Fdc0は、A相、B相、C相、D相、E相、F相の検出信号に含まれる直流成分であり、Aac1cosθ〜Aac5cos5θ、Bac1cos(θ+60°)〜Bac5cos5(θ+60°)、Cac1cos(θ+120°)〜Cac5cos5(θ+120°)、Dac1cos(θ+180°)〜Dac5cos5(θ+180°)、Eac1cos(θ+240°)〜Eac5cos5(θ+240°)、Fac1cos(θ+300°)〜Fac5cos5(θ+300°)は、A相、B相、C相、D相、E相、F相の検出信号に含まれる1次〜5次の交流成分である。
従って、上式(18)〜(23)に示す、A(θ)、B(θ)、C(θ)、D(θ)、E(θ)、F(θ)から、差動回路において、A(θ)とD(θ)の差動信号、B(θ)とE(θ)の差動信号、C(θ)とF(θ)の差動信号を生成すると、この差動信号からなる3相の信号da、db、dcは、下式(24)〜(26)となる。
da=A(θ)-D(θ)=2Aac1cosθ+2Aac3cos3θ+2Aac5cos5θ
・・・(24)
db(θ)=B(θ)-E(θ)=2Aac1cos(θ-120°)+2Aac3cos3(θ-120°)+2Aac5cos5(θ-120°)
・・・(25)
dc(θ)=C(θ)-F(θ)=2Aac1cos(θ+120°)+2Aac3cos3(θ+120°)+2Aac5cos5(θ+120°)
・・・(26)
上式(24)〜(26)から、上記差動信号には、3次と5次の高調波成分が残ることが解る。つまり、差動信号を生成することで、偶数次の高調波成分が除去される。
fc(θ)=3(Aac1cosθ+Aac5cos5θ)/2 ・・・(27)
fs(θ)=3(Aac1sinθ+Aac5sin5θ)/2 ・・・(28)
従って、角度演算された誤差を波形にすると5次の高調波成分が支配的な誤差波形が得られる。
fc(θ)=3(Aac1cosθ)/2 ・・・(29)
fs(θ)=3(Aac1sinθ)/2 ・・・(30)
これにより、誤差の要因となる高調波成分を大幅に小さくすることができるので、演算部43において、誤差を補正するためのメモリや回路等を設ける必要がない、または演算部43において誤差の補正演算を行う必要がない。従って、6相のレゾルバに対しても、メモリや回路等を設ける必要がないことによるコストの低減、または補正処理演算を省くことができるのでその演算負荷の低減などの効果が得られる。
複合型のレゾルバは、3相レゾルバを2つ複合して用いるもので、各3相レゾルバの構成は、上記図8の3相レゾルバと同様となる。よって、3相のレゾルバと各構成部の符号を同じとする。
従って、ASICからの制御信号によって励磁切替スイッチ48が作動し、励磁回路40の出力端子が3相のABSレゾルバに接続されると、励磁回路40から、まず3相のABSレゾルバに、励磁信号sin(ωt)が供給される。一方、DDモータの回転軸が回転すると、これによりレゾルバロータ20が回転して、3相ABSレゾルバの各相からはアナログのレゾルバ信号が出力される。このアナログの3相のレゾルバ信号は、電流/電圧変換回路41aにおいて、3相の信号電流から3相の信号電圧へと変換されて、3/2変換回路42aへと出力される。3/2変換回路42aにおいて、3相のレゾルバ信号は、SIN信号及びCOS信号の2相のABS信号に変換される。一方、ASICからの制御信号によってABS/INC切替スイッチ49が作動し、3/2変換回路42aの出力端子が、演算部43の入力端子へと接続される。従って、3/2変換回路42aによって変換出力された2相のABS信号(SIN信号及びCOS信号)は、演算部43へと入力される。
移相器44の動作については、上記図8のレゾルバ制御回路のものと同様となるので記載を省略する。
従って、本実施の形態においても、各3相レゾルバのレゾルバステータ10の極片歯11の歯先と、レゾルバロータ20の歯21の歯先との少なくとも一方に、R1/W1とR2/W2との少なくとも一方が13±2[%]の範囲内となるRを設けたので、上記図8のレゾルバ制御回路と同様の作用及び効果を得ることができる。
この4相のレゾルバは、上記図9の4相レゾルバと同様の構成となるので、各構成部の符号を同じとする。
この演算部43では、A/D変換回路46a及び46bからのSIN、COSの2つのデジタル値に対して逆正接を返すATAN2関数を用いて、図13に示すように、電気角度0〜360[°]毎に、角度位置情報を、−180〜180[°]に変換する。
以上、本実施の形態のVR型レゾルバは、レゾルバステータ10の極片歯11の歯先と、レゾルバロータ20の歯21の歯先との少なくとも一方に、R1/W1とR2/W2との少なくとも一方が13±2[%]の範囲内となるRを設けたので、歯先間のエアギャップの変動によるギャップパーミアンスの変動を小さくすることができる。これにより、検出信号に含まれる高調波成分を打ち消すあるいは低減することができるので、位置検出精度に対する誤差を低減することができる。
上記実施の形態において、レゾルバステータ10は、発明1〜4並びに6〜9のいずれか1に記載の固定子に対応し、レゾルバロータ20は、発明1〜4、6、7及び10のいずれか1に記載の回転子に対応し、差動回路45、45a、45bは、発明9に記載の差動信号生成回路に対応する。
この構成の場合に、直線状の固定子は、発明10の固定子に対応し、直線状の移動子は、発明10の移動子に対応する。
これによって、例えば、レゾルバロータ側の歯21の歯先にR2の上限がR2/W2が10[%]以内の制約がある場合でも、歯21の歯先にR2/W2=10[%]となるRを設け、レゾルバステータ10側の極片歯11の歯先にR1/W1=16[%]となるRを設けることで、「{(R1/W1)+(R2/W2)}/2=(10+16)/2=13[%]」となり、R1/W1とR2/W2との少なくとも一方が13±2[%]の範囲内となるRを設けたのと同様に検出誤差を小さくすることができる。
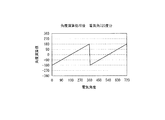
また、上記実施の形態においては、極片歯11の歯幅W1と歯21の歯幅W2とを同じ幅(W1=W2)で構成し、レゾルバステータ10における歯間距離L1と、レゾルバロータ20の歯間距離L2とを同じ長さ(L1=L2)で構成し、W1:L1=W2:L2=1:2に構成したが、この構成に限らず、歯幅W1とW2との長さを異なる長さに構成してもよい。
このように、W1とW2とを異ならせた場合に、W2/L2と検出誤差との関係は、図14(b)に示すように、非線形の関係となる。上記実施の形態においては、歯幅W2と歯間距離L2との比を1:2としている。これは、L2の長さに対してW2を1/3の長さ(幅)としていることになる(1/3≒33.33[%])。
以上の関係から、W2/L2を固定値(例えば、33.33[%])としたときに、検出誤差を打ち消すR2/W2(例えば、13[%])が存在することが解る。
従って、例えば、歯21の歯幅W2を、W2/L2=31[%]となる幅に設定する場合は、図14(b)から、31[%]のときの検出誤差が+16[秒]となっているので、この+16[秒]を歯先のRの大きさによって生じる誤差成分(高周波成分)で打ち消すようにR2の値を設定してやればよいことが解る。
この場合は、図14(c)から、R2/W2=19[%]で、検出誤差が+24[秒]となっているので、歯21の歯先のRをR2/W2=19[%]となる大きさR2で設けることで−24[秒]の検出誤差を打ち消すことができる。なお、検出誤差を打ち消せればよいので、歯21側ではなく、極片歯11の歯先のRを、R1/W1=19[%]となる大きさR1で設けることでも同様に検出誤差を打ち消すことができる。
11 極片歯
12 極片
20 レゾルバロータ
21 歯
40 励磁回路
41,41a,41b 電流/電圧変換回路
42,42a,42b 3/2変換回路
43 演算部
44 移相器
45,45a〜45c 差動回路
46a,46b A/D変換回路
Claims (10)
- 先端部に複数の極片歯を有する極片を円周等分に複数有して固定支持されると共に各極片に相数Nの励磁と信号出力とを兼ね備えたコイルを各相毎に直列に巻回してなる環状の固定子と、この固定子の前記極片歯にギャップをもって対向して円周方向に形成された歯列を有して固定子と同心に配し相対回転自在に支持された環状の回転子とを備えたVR型レゾルバにおいて、
前記固定子の各極片歯と前記回転子の各歯との間のギャップパーミアンスの変動による前記各相のコイルから出力されるレゾルバ信号に含まれる高調波成分を比較的低減する大きさのRを、前記固定子の各極片歯の先端部における円周方向の両端部と、前記回転子の歯列における各歯の先端部における円周方向の両端部とに設けたことを特徴とするVR型レゾルバ。 - 前記固定子の極片歯の歯幅と前記回転子の歯の歯幅とを同じ幅にしたことを特徴とする請求項1に記載のVR型レゾルバ。
- 前記固定子の各極片歯の円周方向の歯幅W1と前記各極片において隣り合う前記各極片歯間の距離L1とを、W1:L1=1:2となる幅及び長さに構成し、前記隣り合う各極片歯間の凹部の深さH1を、W1:H1=1:2となる深さに構成し、前記回転子の歯列における各歯の円周方向の歯幅W2と隣り合う前記各歯間の距離L2とを、W2:L2=1:2となる幅及び長さに構成し、前記隣り合う各歯間の凹部の深さH2を、W2:H2=1:2となる深さに構成したことを特徴とする請求項2に記載のVR型レゾルバ。
- 前記固定子の極片歯の前記両端部に設けるRの大きさR1と前記W1とを、該R1を前記W1で除算した結果が「13[%]±2[%]」の範囲内となる大きさにし、前記回転子の歯の前記両端部に設けるRの大きさR2と前記W2とを、該R2を前記W2で除算した結果が「13[%]±2[%]」の範囲内となる大きさにしたことを特徴とする請求項3に記載のVR型レゾルバ。
- 前記固定子の極片歯の前記両端部に設けるRの大きさR1及び前記W1と前記回転子の歯の前記両端部に設けるRの大きさR2及び前記W2とを、前記R1を前記W1で除算した結果と前記R2を前記W2で除算した結果との平均が「13[%]±2[%]」の範囲内となる大きさにしたことを特徴とする請求項3に記載のVR型レゾルバ。
- 先端部に複数の極片歯を有する極片を円周等分に複数有して固定支持されると共に各極片に相数Nの励磁と信号出力とを兼ね備えたコイルを各相毎に直列に巻回してなる環状の固定子と、この固定子の前記極片歯に対向して円周方向に形成された歯列を有して固定子と同心に配し相対回転自在に支持された環状の回転子とを備えたVR型レゾルバにおいて、
前記固定子の極片歯の円周方向の歯幅と前記回転子の歯の円周方向の歯幅とを同じ幅Wに構成し、
前記各極片歯の歯幅Wと前記各極片において隣り合う前記各極片歯間の距離L1とを、W:L1=1:2となる幅及び長さに構成し、
前記回転子の各歯の歯幅Wと隣り合う前記歯間の距離L2とを、W:L2=1:2となる幅及び長さに構成し、
前記固定子の各極片歯と前記回転子の各歯との間のギャップパーミアンスの変動による前記各相のコイルから出力されるレゾルバ信号に含まれる高調波成分を比較的低減する大きさのRを、前記固定子の各極片歯の先端部における円周方向の両端部と、前記回転子の歯列における各歯の先端部における円周方向の両端部とのいずれか一方に設けたことを特徴とするVR型レゾルバ。 - 前記固定子の極片歯及び前記回転子の歯のいずれか一方の前記両端部に設けるRの大きさを、該Rの大きさを前記固定子の極片歯及び前記回転子の歯のいずれか一方の円周方向の幅Wで除算した結果が「13[%]±2[%]」の範囲内となる大きさにしたことを特徴とする請求項6に記載のVR型レゾルバ。
- 前記固定子は、前記相数Nとして3、4及び6のいずれか1つの相数のコイルを各相毎に直列に巻き回してなることを特徴とする請求項1乃至請求項7のいずれか1項に記載のVR型レゾルバ。
- 前記固定子が、前記相数Nが4以上の偶数の相数で構成されているときに、前記各相のコイルから出力されるN相のレゾルバ信号における各2相の組み合わせに対するレゾルバ信号の差動信号を生成する差動信号生成手段を備え、該差動信号生成手段で生成した前記各2組の差動信号に基づき、SIN信号及びCOS信号の2相の信号を生成することを特徴とする請求項1乃至請求項8のいずれか1項に記載のVR型レゾルバ。
- 先端部に複数の極片歯を有する極片を直線状に等分に複数有して固定支持されると共に各極片に相数Nの励磁と信号出力とを兼ね備えたコイルを各相毎に直列に巻回してなる直線状の固定子と、この固定子の前記極片歯にギャップをもって対向して形成された歯列を有して固定子と相対移動自在に支持された直線状の可動子とを備えたVR型レゾルバにおいて、
前記固定子の各極片歯と前記回転子の各歯との間のギャップパーミアンスの変動による前記各相のコイルから出力されるレゾルバ信号に含まれる高調波成分を比較的低減する大きさのRを、前記固定子の各極片歯の先端部における直線方向の両端部と、前記回転子の歯列における各歯の先端部における直線方向の両端部とに設けたことを特徴とするVR型レゾルバ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008163148A JP5217679B2 (ja) | 2008-06-23 | 2008-06-23 | Vr型レゾルバ、モータ及び直動型リニアモータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008163148A JP5217679B2 (ja) | 2008-06-23 | 2008-06-23 | Vr型レゾルバ、モータ及び直動型リニアモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010002373A true JP2010002373A (ja) | 2010-01-07 |
| JP5217679B2 JP5217679B2 (ja) | 2013-06-19 |
Family
ID=41584213
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008163148A Active JP5217679B2 (ja) | 2008-06-23 | 2008-06-23 | Vr型レゾルバ、モータ及び直動型リニアモータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5217679B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013083531A (ja) * | 2011-10-07 | 2013-05-09 | Nsk Ltd | トルクセンサ及びそれを備えた電動パワーステアリング装置 |
| JP2015222243A (ja) * | 2014-05-23 | 2015-12-10 | 日本精工株式会社 | 直線位置検出装置及び駆動装置 |
| JP2018031619A (ja) * | 2016-08-23 | 2018-03-01 | ルネサスエレクトロニクス株式会社 | レゾルバ補正装置及び半導体装置 |
| JP2019124514A (ja) * | 2018-01-15 | 2019-07-25 | 多摩川精機株式会社 | 多極レゾルバ |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06129873A (ja) * | 1992-10-22 | 1994-05-13 | Akira Ishizaki | 位置検出装置 |
-
2008
- 2008-06-23 JP JP2008163148A patent/JP5217679B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06129873A (ja) * | 1992-10-22 | 1994-05-13 | Akira Ishizaki | 位置検出装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013083531A (ja) * | 2011-10-07 | 2013-05-09 | Nsk Ltd | トルクセンサ及びそれを備えた電動パワーステアリング装置 |
| JP2015222243A (ja) * | 2014-05-23 | 2015-12-10 | 日本精工株式会社 | 直線位置検出装置及び駆動装置 |
| JP2018031619A (ja) * | 2016-08-23 | 2018-03-01 | ルネサスエレクトロニクス株式会社 | レゾルバ補正装置及び半導体装置 |
| JP2019124514A (ja) * | 2018-01-15 | 2019-07-25 | 多摩川精機株式会社 | 多極レゾルバ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5217679B2 (ja) | 2013-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6779227B2 (ja) | 角度検出装置および電動パワーステアリング装置 | |
| JP4568298B2 (ja) | 位置検出装置 | |
| JP2004271284A (ja) | 角度位置検出装置 | |
| CN107860404B (zh) | 旋转编码器及旋转编码器的绝对角度位置检测方法 | |
| JP5217679B2 (ja) | Vr型レゾルバ、モータ及び直動型リニアモータ | |
| JP2014085135A (ja) | 高精度レゾルバ | |
| JP2012229981A (ja) | 位置検出装置 | |
| JP2013238431A (ja) | レゾルバ装置 | |
| JP3690338B2 (ja) | モータ制御装置 | |
| JP2010156554A (ja) | 位置検出装置 | |
| JP6780855B2 (ja) | サーボアクチュエータ | |
| JP2001183169A (ja) | 位置検出装置 | |
| JP6205683B2 (ja) | 回転角度検出装置、画像処理装置及び回転角度検出方法 | |
| JP5533588B2 (ja) | 回転角度位置検出装置及びその誤差検出方法 | |
| JP7291104B2 (ja) | 3相ブラシレスモーター及び3相ブラシレスモーターの回転位置検出方法 | |
| JP5343887B2 (ja) | 回転角度検出装置、モータ及び回転テーブル装置 | |
| JP5573758B2 (ja) | 位置検出装置 | |
| JP4147469B2 (ja) | シンクロレゾルバ | |
| JP2000081344A (ja) | 高精度vr型レゾルバ | |
| JP5533578B2 (ja) | 回転角度位置検出装置及びその誤差検出方法 | |
| JP7186846B1 (ja) | 角度検出装置及び交流回転機の制御システム | |
| JP2020176853A (ja) | 回転角度検出装置 | |
| JP4223892B2 (ja) | 角度位置検出装置 | |
| WO2022219774A1 (ja) | レゾルバ、及びそれを搭載する電動パワーステアリング装置 | |
| JP5184590B2 (ja) | 回転検出器およびその位相誤差補正方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110518 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120816 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120828 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120926 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130218 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160315 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5217679 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |