JP2007110100A - リソグラフィ装置及び制御方法 - Google Patents
リソグラフィ装置及び制御方法 Download PDFInfo
- Publication number
- JP2007110100A JP2007110100A JP2006249159A JP2006249159A JP2007110100A JP 2007110100 A JP2007110100 A JP 2007110100A JP 2006249159 A JP2006249159 A JP 2006249159A JP 2006249159 A JP2006249159 A JP 2006249159A JP 2007110100 A JP2007110100 A JP 2007110100A
- Authority
- JP
- Japan
- Prior art keywords
- controller
- movable part
- function
- movement function
- lithographic apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
- G03F7/70725—Stages control
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
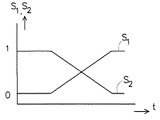
【解決手段】コントローラは、第1のコントローラ移動機能と、第2のコントローラ移動機能とを備える。セレクタは、可動部の状態に応じて、第1のコントローラ移動機能CON1または第2のコントローラ移動機能CON2を選択する。可動部が実質的に静止状態であるときに第1のコントローラ移動機能CON1を選択し、一方、可動部が実質的に非静止状態であるときに第2のコントローラ移動機能CON2を選択することができる。
【選択図】図2
Description
Claims (24)
- 可動部と、
可動部の位置量を制御するコントローラであって、第1のコントローラ移動機能と第2のコントローラ移動機能を備え、かつ可動部の状態に応じて第1のコントローラ移動機能または第2のコントローラ移動機能を選択するセレクタをさらに備えるコントローラと、
を備えることを特徴とするリソグラフィ装置。 - セレクタは、可動部が実質的に静止状態である場合に第1のコントローラ移動機能を選択し、可動部が実質的に非静止状態である場合に第2のコントローラ移動機能を選択することを特徴とする、請求項1に記載のリソグラフィ装置。
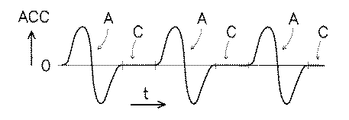
- 可動部の非静止状態が可動部の加速を含み、可動部の静止状態が可動部の一定速度を含むことを特徴とする、請求項2に記載のリソグラフィ装置。
- 可動部の非静止状態が可動部の移動を含み、可動部の静止状態が可動部の静止位置を含むことを特徴とする、請求項2に記載のリソグラフィ装置。
- セレクタが、可動部の設定信号を受信する設定点入力を備え、セレクタが設定信号に応じて第1のコントローラ移動機能または第2のコントローラ移動機能を選択する場合に、コントローラが、設定信号から可動部の状態を判定することを特徴とする、請求項1に記載のリソグラフィ装置。
- セレクタは、設定信号が非静止状態にある場合に第1のコントローラ移動機能を選択し、設定信号が静止状態にある場合に、少なくとも可動部の整定時間中は、第2のコントローラ移動機能を選択することを特徴とする、請求項5に記載のリソグラフィ装置。
- セレクタが重み付きセレクタを備え、コントローラが当該重み付きセレクタを駆動する重み係数を発生する重み関数係数発生器を備え、これにより、重み付きセレクタが第1のコントローラ移動機能と第2のコントローラ移動機能との間の段階的な移行を行うことを特徴とする、請求項1に記載のリソグラフィ装置。
- 第1および第2のコントローラは、それぞれPIDコントローラ移動機能と、第2のコントローラ移動機能の積分器ゲインが第1のコントローラ移動機能の積分器ゲインを上回ることを特徴とする、請求項1に記載のリソグラフィ装置。
- セレクタが第1および/または第2のコントローラ移動機能の積分器ゲインを選択することを特徴とする、請求項8に記載のリソグラフィ装置。
- 位置量が、可動部の位置、速度および加速度のうちの1つを含むことを特徴とする、請求項1に記載のリソグラフィ装置。
- 可動部が、基板を保持する基板テーブル、パターン形成体を保持するマスクテーブル、投影システムの光学素子および基板を操作する基板操作部のうちの1つを備えることを特徴とする、請求項1に記載のリソグラフィ装置。
- プロセスの出力量を制御するコントローラを備えるリソグラフィ装置であって、コントローラが第1のコントローラ移動機能および第2のコントローラ移動機能を備え、プロセスの状態に応じて第1のコントローラ移動機能または第2のコントローラ移動機能を選択するセレクタをさらに備えることを特徴とするリソグラフィ装置。
- セレクタが、プロセスが実質的に静止状態である場合に第1のコントローラ移動機能を選択し、プロセスが実質的に非静止状態である場合に第2のコントローラ移動機能を選択することを特徴とする、請求項12に記載のリソグラフィ装置。
- リソグラフィ装置の可動部の位置量を制御する方法であって、
第1のコントローラ移動機能と第2のコントローラ移動機能とを設けることと、
可動部の状態に応じて第1のコントローラ移動機能または第2のコントローラ移動機能を選択することと、
を含む方法。 - 可動部が実質的に静止状態である場合に第1のコントローラ移動機能を選択し、可動部が実質的に非静止状態である場合に第2のコントローラ移動機能を選択することを含むことを特徴とする請求項14に記載の方法。
- 可動部の非静止状態が可動部の加速を含み、可動部の静止状態が可動部の一定速度を含むことを特徴とする請求項14に記載の方法。
- 可動部の非静止状態が可動部の移動を含み、可動部の静止状態が可動部の静止位置を含むことを特徴とする請求項14の方法。
- 可動部の設定信号を受信することと、当該設定信号に応じて第1のコントローラ移動機能または第2のコントローラ移動機能を選択することにより設定信号から可動部の状態を判定することと、を含むことを特徴とする請求項14に記載の方法。
- 設定信号が非静止状態にある場合に第1のコントローラ移動機能を選択することと、少なくとも可動部の整定時間中、設定信号が静止状態にある場合に第2のコントローラ移動機能を選択することと、を含むことを特徴とする請求項18に記載の方法。
- 選択を行うよう重み付きセレクタを駆動する重み係数を発生することを含み、これにより重み付きセレクタが第1コントローラ移動機能と第2のコントローラ移動機能との間の段階的な移行を与えることを特徴とする請求項14に記載の方法。
- 第1および第2のコントローラ移動機能が、それぞれPIDコントローラ移動機能を備え、第2のコントローラ移動機能の積分器ゲインが第1のコントローラ移動機能の積分ゲインを上回ることを特徴とする請求項14に記載の方法。
- 第1および/または第2のコントローラ移動機能の積分器ゲインを選択することを含むことを特徴とする請求項21に記載の方法。
- 位置量が、可動部の位置、速度および加速度のうちの1つを含むことを特徴とする請求項14に記載の方法。
- 可動部が、基板を保持する基板テーブル、パターン形成体を保持するマスクテーブル、投影システムの光学素子、および基板を操作する基板操作部のうちの一つを備えることを特徴とする請求項14に記載の方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/227,445 US7657334B2 (en) | 2005-09-16 | 2005-09-16 | Lithographic apparatus and control method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007110100A true JP2007110100A (ja) | 2007-04-26 |
Family
ID=37885259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006249159A Pending JP2007110100A (ja) | 2005-09-16 | 2006-09-14 | リソグラフィ装置及び制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7657334B2 (ja) |
| JP (1) | JP2007110100A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009253287A (ja) * | 2008-04-08 | 2009-10-29 | Asml Netherlands Bv | ステージシステム、および当該ステージシステムを備えるリソグラフィ装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2727794A1 (en) * | 2008-06-11 | 2009-12-17 | Qinghui Yuan | Auto-tuning electro-hydraulic valve |
| WO2014122223A1 (en) | 2013-02-08 | 2014-08-14 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6488810A (en) * | 1987-09-30 | 1989-04-03 | Nippon Seiko Kk | Method and device for positioning control using servo motor |
| JPH0511852A (ja) * | 1991-07-02 | 1993-01-22 | Canon Inc | 位置決め制御装置 |
| JPH09258831A (ja) * | 1996-03-22 | 1997-10-03 | Nissan Motor Co Ltd | 高速位置決め方法及びその装置 |
| JPH10223522A (ja) * | 1997-02-06 | 1998-08-21 | Nikon Corp | 露光装置及び露光方法 |
| JP2000100721A (ja) * | 1998-07-21 | 2000-04-07 | Nikon Corp | 走査露光方法および走査型露光装置ならびにデバイスの製造方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2866556B2 (ja) * | 1993-09-02 | 1999-03-08 | 三菱電機株式会社 | 工作機械の制御装置および制御方法 |
| EP1246014A1 (en) * | 2001-03-30 | 2002-10-02 | ASML Netherlands B.V. | Lithographic apparatus |
| TWI285299B (en) * | 2001-04-04 | 2007-08-11 | Asml Netherlands Bv | Lithographic manufacturing process, lithographic projection apparatus, and device manufactured thereby |
| US7209219B2 (en) * | 2003-03-06 | 2007-04-24 | Asml Netherlands B.V. | System for controlling a position of a mass |
| US7046093B1 (en) * | 2003-08-27 | 2006-05-16 | Intergrated Device Technology, Inc. | Dynamic phase-locked loop circuits and methods of operation thereof |
| TWI254190B (en) * | 2003-09-22 | 2006-05-01 | Asml Netherlands Bv | Lithographic apparatus, device manufacturing method, and device manufactured thereby |
| US7289858B2 (en) * | 2004-05-25 | 2007-10-30 | Asml Netherlands B.V. | Lithographic motion control system and method |
-
2005
- 2005-09-16 US US11/227,445 patent/US7657334B2/en active Active
-
2006
- 2006-09-14 JP JP2006249159A patent/JP2007110100A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6488810A (en) * | 1987-09-30 | 1989-04-03 | Nippon Seiko Kk | Method and device for positioning control using servo motor |
| JPH0511852A (ja) * | 1991-07-02 | 1993-01-22 | Canon Inc | 位置決め制御装置 |
| JPH09258831A (ja) * | 1996-03-22 | 1997-10-03 | Nissan Motor Co Ltd | 高速位置決め方法及びその装置 |
| JPH10223522A (ja) * | 1997-02-06 | 1998-08-21 | Nikon Corp | 露光装置及び露光方法 |
| JP2000100721A (ja) * | 1998-07-21 | 2000-04-07 | Nikon Corp | 走査露光方法および走査型露光装置ならびにデバイスの製造方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009253287A (ja) * | 2008-04-08 | 2009-10-29 | Asml Netherlands Bv | ステージシステム、および当該ステージシステムを備えるリソグラフィ装置 |
| US8279407B2 (en) | 2008-04-08 | 2012-10-02 | Asml Netherlands B.V. | Stage system and lithographic apparatus comprising such stage system |
Also Published As
| Publication number | Publication date |
|---|---|
| US20070067057A1 (en) | 2007-03-22 |
| US7657334B2 (en) | 2010-02-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100937967B1 (ko) | 리소그래피 장치 및 디바이스 제조 방법 | |
| JP4880665B2 (ja) | リソグラフィ装置、ステージシステムおよびステージ制御方法 | |
| KR100696733B1 (ko) | 리소그래피 장치 및 디바이스 제조방법 | |
| JP5705466B2 (ja) | 可動物体の位置を制御する方法、位置決め装置を制御する制御システム、およびリソグラフィ装置 | |
| JP2009194384A (ja) | 可動サポート、位置制御システム、リソグラフィ装置、および、交換可能オブジェクトの位置を制御する方法 | |
| JP2008060563A (ja) | 可動物体の位置を制御するための方法、位置決めシステム、および、リソグラフィ装置 | |
| JP2007129218A (ja) | リソグラフィ装置およびデバイス製造方法 | |
| JP2006310849A (ja) | リソグラフィ装置、位置量コントローラ及び制御方法 | |
| US7016019B2 (en) | Lithographic apparatus and device manufacturing method | |
| JP2004342082A (ja) | 特にリソグラフ装置における質量の位置の制御 | |
| JP5422633B2 (ja) | コントローラ、リソグラフィ装置、オブジェクト位置の制御方法及びデバイス製造方法 | |
| JP4729065B2 (ja) | 座標変換を伴う駆動システムを有するリソグラフィ装置および方法 | |
| JP5483480B2 (ja) | 位置決めデバイスのためのコントローラ、位置決めデバイスおよび位置決めデバイスを備えるリソグラフィ装置 | |
| JP2004343115A (ja) | 制御システム、リソグラフィ装置、デバイス製造方法、およびそれによって製造されたデバイス | |
| JP2007110100A (ja) | リソグラフィ装置及び制御方法 | |
| JP4838834B2 (ja) | サーボ制御システム、リソグラフィ装置および制御方法 | |
| JP4429296B2 (ja) | リソグラフィ装置、投影装置及びデバイス製造方法 | |
| US9977341B2 (en) | Lithographic apparatus and device manufacturing method | |
| JP2003068640A (ja) | リソグラフィ投影装置、デバイス製造方法、該方法により製造されたデバイス、測定方法 | |
| JP2005045227A (ja) | リソグラフィ装置およびデバイス製造方法 | |
| US7847919B2 (en) | Lithographic apparatus having feedthrough control system | |
| JP2020521156A (ja) | 制御システム、制御システムの帯域幅を増加させる方法、及びリソグラフィ装置 | |
| JP2010147467A (ja) | リソグラフィ装置および制御方法 | |
| CN118633061A (zh) | 光刻装置控制器系统 | |
| JP2005045246A (ja) | リソグラフィ装置、デバイス製造方法およびそれにより製造したデバイス |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090812 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090814 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100506 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100806 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110107 |