JP2007040407A - 自動マニュアルトランスミッションのシフト位置検出装置 - Google Patents
自動マニュアルトランスミッションのシフト位置検出装置 Download PDFInfo
- Publication number
- JP2007040407A JP2007040407A JP2005225380A JP2005225380A JP2007040407A JP 2007040407 A JP2007040407 A JP 2007040407A JP 2005225380 A JP2005225380 A JP 2005225380A JP 2005225380 A JP2005225380 A JP 2005225380A JP 2007040407 A JP2007040407 A JP 2007040407A
- Authority
- JP
- Japan
- Prior art keywords
- shift
- magnet
- manual transmission
- shift position
- automatic manual
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/3023—Constructional features of the final output mechanisms the final output mechanisms comprising elements moved by fluid pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/68—Inputs being a function of gearing status
- F16H59/70—Inputs being a function of gearing status dependent on the ratio established
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/3023—Constructional features of the final output mechanisms the final output mechanisms comprising elements moved by fluid pressure
- F16H63/3026—Constructional features of the final output mechanisms the final output mechanisms comprising elements moved by fluid pressure comprising friction clutches or brakes
- F16H2063/303—Constructional features of the final output mechanisms the final output mechanisms comprising elements moved by fluid pressure comprising friction clutches or brakes the friction member is actuated and released by applying pressure to different fluid chambers
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19219—Interchangeably locked
- Y10T74/19251—Control mechanism
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Fluid Mechanics (AREA)
- General Physics & Mathematics (AREA)
- Gear-Shifting Mechanisms (AREA)
- Control Of Transmission Device (AREA)
- Actuator (AREA)
Abstract
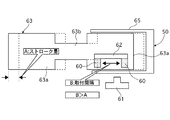
【解決手段】 変速動作に伴って移動する位置に設定した磁石60,60と、該磁石60,60と対向する固定位置に設定した磁束検出器61と、を備えた自動マニュアルトランスミッションのシフト位置検出装置において、前記磁石60,60は、3−5シフトアクチュエータ50のスプール63に設定し、前記磁束検出器61は、前記磁石60,60と対向する位置のアクチュエータユニットケース64に設定し、かつ、前記3−5シフトアクチュエータ50のシリンダ65,65は、前記スプール63が変速によりストロークしても常に前記磁石60,60を覆うように形成した。
【選択図】 図2
Description
(a) センサブラケットのシフトフォークやシフトロッドへの組み付けが困難であると共に、磁束検出器の変速機ケースの内壁への組み付け設定も困難である。
(b) シフトフォークやシフトロッドに組み付けられるセンサブラケットは、支持剛性の低い片持ち支持であるため、振動入力による撓みやネジの緩みにより耐久性が低い。
(c) 磁石をシフト操作系側に設定し、磁束検出器を変速機ケース側に設定するというように、離れた部材への設定であるため、磁石と磁束検出器との隙間調整が困難である。
(d) 2個の磁石が変速機ケース内に露出しているため、この磁石に鉄粉やコンタミ等が付着し、シフト位置検出精度が低下する。
前記磁石は、シフトアクチュエータのスプールに設定し、前記磁束検出器は、前記磁石と対向する位置のアクチュエータケース部材に設定し、かつ、前記シフトアクチュエータのシリンダは、前記スプールが変速によりストロークしても常に前記磁石を覆うように形成したことを特徴とする。
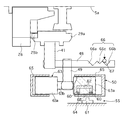
図1は実施例1のシフト位置検出装置が適用されたツインクラッチ式自動マニュアルトランスミッションを示す全体システム図である。
実施例1のツインクラッチ式自動マニュアルトランスミッションの変速ギアトレーンとしては、図1に示すように、変速機ケース1と、駆動入力軸2と、第1クラッチCAと、第2クラッチCBと、トーショナルダンパ3と、オイルポンプ4と、第1変速機入力軸5と、第2変速機入力軸6と、を備えている。
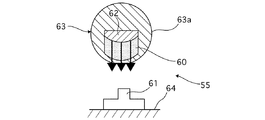
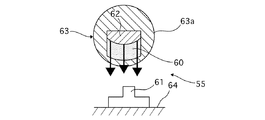
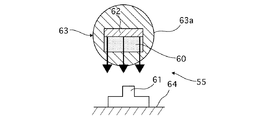
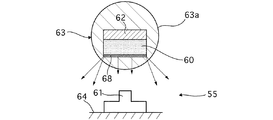
そして、図2に示すように、前記磁石60,60は、3−5シフトアクチュエータ50のスプール63に設定し、前記磁束検出器61は、前記磁石60,60と対向する位置のアクチュエータユニットケース64(アクチュエータケース部材)に設定し、かつ、前記3−5シフトアクチュエータ50のシリンダ65,65は、前記スプール63が変速によりストロークしても常に前記磁石60,60を覆うように形成している。
[変速作用]
中立位置(Nレンジ)や駐車位置(Pレンジ)の選択時には、クラッチCA,CBの双方を開放しておき、かつ、シフトアクチュエータ50,52,53,54は、全て図1に示す中立位置にしておく。つまり、同期噛合機構28,29,37,38のカップリングスリーブ28a,29a,37a,38aを全て中立位置に維持し、ツインクラッチ式自動マニュアルトランスミッションが動力伝達を行わないようにする。
第1速時には、1−Rシフトアクチュエータ52を図1の左方向に動作させる制御を行うことで、同期噛合機構28のカップリングスリーブ28aを図1の左方向に移動させて歯車22をカウンターシャフト15に駆動結合し、その後、第1クラッチCAを締結する。
これにより、第1クラッチCAからの駆動入力が、第1変速機入力軸5→第1速歯車組G1→カウンターシャフト15→出力歯車組19,20を介して変速機出力軸11により軸方向に出力され、第1速の動力伝達が行われる。
これにより、第2クラッチCBからの駆動入力が、第2変速機入力軸6→第2速歯車組G2→カウンターシャフト15→出力歯車組19,20を介して変速機出力軸11により軸方向に出力され、第2速の動力伝達が行われる。
これにより、第1クラッチCAからの駆動入力が、第1変速機入力軸5→第3速歯車組G3→カウンターシャフト15→出力歯車組19,20を介して変速機出力軸11により軸方向に出力され、第3速の動力伝達が行われる。
これにより、第2クラッチCBからの駆動入力が、第2変速機入力軸6→第4速歯車組G4→カウンターシャフト15→出力歯車組19,20を介して変速機出力軸11により軸方向に出力され、第4速の動力伝達が行われる。
これにより、第1クラッチCAからの駆動入力が、第1変速機入力軸5→第3速歯車組G3→カウンターシャフト15→出力歯車組19,20を介して変速機出力軸11により軸方向に出力され、第5速(変速比1)の動力伝達が行われる。
これにより、第2クラッチCBからの駆動入力が、第2変速機入力軸6→第6速歯車組G6→カウンターシャフト15→出力歯車組19,20を介して変速機出力軸11により軸方向に出力され、第6速の動力伝達が行われる。なお、第6速から順次第1速へとダウンシフトさせるに際しても、上記アップシフトとは逆の制御を行う。
これにより、第1クラッチCAからの駆動入力が、第1変速機入力軸5→後退速歯車組GR→カウンターシャフト15→出力歯車組19,20を介して変速機出力軸11により軸方向に出力され、後退速の動力伝達が行われる。
上記のように、ツインクラッチ式自動マニュアルトランスミッションの場合、奇数変速段グループと偶数段変速グループとのそれぞれに第1クラッチCAと第2クラッチCBを設け、一方の変速段グループにおける変速段を選択すると共に対応するクラッチを締結させた状態では、他方の変速段グループにおける何れの変速段も選択させないようにし、変速にあたっては、該他方の変速段グループにおける変速段をそれに対応する同期噛合機構により選択し、対応するクラッチを開放した状態で、上記一方の変速段グループに係わるクラッチを開放すると共に、上記他方の変速段グループに係わるクラッチを締結する、いわゆるクラッチの掛け替え制御と、両変速段グループ間での変速段の交互選択と、により自動変速を行わせることができる。
(a) センサブラケットのシフトロッドへの組み付け時に周囲の部材との干渉を避けながらの組み付けとなり組み付けが困難であると共に、磁束検出器の変速機ケースの内壁への組み付け設定も磁石に対向する正規位置に設定する必要があり、組付けが困難である。
(b) シフトロッドに組み付けられるセンサブラケットは、支持剛性の低い片持ち支持であるため、振動入力によりブラケット撓みが繰り返されることでセンサブラケットが変形してしまったり、ネジの緩みによりセンサブラケットにがたつきが発生したりし、支持剛性がさらに低下するというように、耐久信頼性が低い。
(c) 磁石をシフト操作系のシフトロッドに設定し、磁束検出器を変速機ケースに設定するというように、互いにリンクすることのない離れた部材への設定であるため、磁石と磁束検出器との隙間調整が困難である。
(d) 2個の磁石が変速機ケース内に露出しているため、この磁石に潤滑油として噴射されるトランスミッションオイルに含まれる鉄粉やコンタミ等が付着し、磁石からの磁力が低下したり磁力の方向が変わり、磁束検出器にて検出する磁束レベルが低くなる。このため、位置判別が難しくなり、シフト位置検出精度が低下する。
これに対し、実施例1では、3−5シフト位置センサ55の磁石60,60を、3−5シフトアクチュエータ50のスプール63に設定し、磁束検出器61を、磁石60,60と対向する位置のアクチュエータユニットケース64に設定し、かつ、3−5シフトアクチュエータ50のシリンダ65,65は、スプール63が変速によりストロークしても常に磁石60,60を覆うように形成することで、組み付けや隙間調整が容易で、耐久信頼性が高く、かつ、長期にわたって高いシフト位置検出精度を維持しようとするものである。
実施例1の自動マニュアルトランスミッションのシフト位置検出装置にあっては、下記に列挙する効果を得ることができる。
実施例1のラジアル方向着磁の場合には、各磁石60について個々に着磁させる必要があり、製造コストが高くなる。また、扇の角度が大きくなると製造上着磁しにくくなるし、ラジアル方向着磁は角度によるバラツキも大きい。
これに対し、実施例2のシフト位置検出装置では、ストレート方向着磁としたことで、磁石60,60を製造するにあたって、大きい塊の磁石素材に着磁させ、これを所定の大きさにカットして製造することが可能となり、製造コストの低減に寄与するし、着磁のバラツキも小さく抑えることができる。なお、実施例2においても実施例1と同様に、組み付けや隙間調整が容易で、耐久信頼性が高く、かつ、長期にわたって高いシフト位置検出精度を維持することができる。
実施例2の自動マニュアルトランスミッションのシフト位置検出装置にあっては、実施例1の(1),(2),(3),(4),(6)の効果に加えて、下記の効果を得ることができる。
実施例2のストレート方向着磁の場合には、スプール63の回転影響を軽減することは可能であるが、磁力を均等に付与していることでスプール63に周方向ガタにより角度が付くと磁力が少し低下するというように、スプール63の回転影響をゼロにすることはできない。
これに対し、実施例3のシフト位置検出装置では、ストレート方向着磁とし、かつ、厚みが薄い磁石中央部を厚い磁石両端部に比べて磁力を弱く設定している。このため、スプール63が周方向に中立位置にある場合も回転角度が付いた場合も同じレベルの磁力を保てるというように、スプール63の回転影響をほぼゼロにすることができる。なお、実施例3においても実施例1と同様に、組み付けや隙間調整が容易で、耐久信頼性が高く、かつ、長期にわたって高いシフト位置検出精度を維持することができる。
実施例3の自動マニュアルトランスミッションのシフト位置検出装置にあっては、実施例1の(1),(2),(3),(4),(6)の効果に加えて、下記の効果を得ることができる。
実施例3では、磁石60,60の厚みを変えることで磁束量を変えているが、この場合、製造上のバラツキを無視することができない。
これに対し、実施例4のシフト位置検出装置では、磁石60,60の断面形状を厚み均等の方形状とし、ストレート方向着磁により磁力を均等に付与している。このように、磁石60,60の厚みが均等であることで、製造上のバラツキは最小に抑えることができる。そして、スプール63が周方向に中立位置にある場合に磁束検出器61との距離が最も離れ、スプール63が周方向に回転角度が付いた場合に磁束検出器61との距離が最も接近する。よって、スプール63の回転にかかわらず、磁束検出器61が検出する磁束量をほぼ同じとすることができる。言い換えると、磁石60,60の厚みを均等にしながらも、スプール63の回転影響をほぼゼロにすることができる。なお、実施例4においても実施例1と同様に、組み付けや隙間調整が容易で、耐久信頼性が高く、かつ、長期にわたって高いシフト位置検出精度を維持することができる。
実施例4の自動マニュアルトランスミッションのシフト位置検出装置にあっては、実施例1の(1),(2),(3),(4),(6)の効果に加えて、下記の効果を得ることができる。
実施例4の磁石60,60は、厚みを均等にし、磁石60,60と磁束検出器61との距離を傾きに対し比例位置におくことにより、スプール回転影響を無くすことを特徴としているが、磁石60,60と磁束検出器61との位置関係、磁石60,60の大きさにおいて制限が多く、レイアウト的な制約要求が大きくなってしまう。
これに対し、実施例5のシフト位置検出装置では、磁石60,60の断面形状を厚み均等の方形状とし、ストレート方向着磁により磁力を均等に付与し、かつ、磁石表面に磁力コントロール用の整磁板68を設けている。したがって、磁石60,60の厚みは均等であるが、整磁板68の効果により、図10に示すように、中心より両端の磁力が強くなる。そして、スプール63が回転して傾いたとき、磁石60,60と磁束検出器61との距離が近づくように配置する。このように、整磁板68の板厚を適正に調整することにより、レイアウト的な制約を大きく改善することができると共に、どのように傾いても、磁束検出器61が受ける磁束量を均一にし、スプール回転による影響をほぼ100%無くすことができる。なお、実施例5においても実施例1と同様に、組み付けや隙間調整が容易で、耐久信頼性が高く、かつ、長期にわたって高いシフト位置検出精度を維持することができる。
実施例5の自動マニュアルトランスミッションのシフト位置検出装置にあっては、実施例1の(1),(2),(3),(4),(6)の効果に加えて、下記の効果を得ることができる。
CB 第2クラッチ
G1 第1速歯車組
G2 第2速歯車組
G3 第3速歯車組
G4 第4速歯車組
G6 第6速歯車組
GR 後退歯車組
28 1−R同期噛合機構
29 3−5同期噛合機構
37 6−N同期噛合機構
38 2−4同期噛合機構
41 3−5シフトフォーク
42 1−Rシフトフォーク
43 6−Nシフトフォーク
44 2−4シフトフォーク
45 アクチュエータユニット
46 クラッチ油圧モジュール
48 第1シフトロッド
49 3−5シフトブラケット
49a 連結凹部
50 3−5シフトアクチュエータ
51 第2シフトロッド
52 1−Rシフトアクチュエータ
53 6−Nシフトアクチュエータ
54 2−4シフトアクチュエータ
55 3−5シフト位置センサ
56 1−Rシフト位置センサ
57 6−Nシフト位置センサ
58 2−4シフト位置センサ
59 アクチュエータ油圧モジュール
60 磁石
61 磁束検出器
62 ヨーク
63 スプール
63a ピストン部
63b 連結首部
64 アクチュエータユニットケース(アクチュエータケース部材)
65 シリンダ
Claims (10)
- 変速動作に伴って移動する位置に設定した磁石と、該磁石と対向する固定位置に設定した磁束検出器と、を備えた自動マニュアルトランスミッションのシフト位置検出装置において、
前記磁石は、シフトアクチュエータのスプールに設定し、前記磁束検出器は、前記磁石と対向する位置のアクチュエータケース部材に設定し、かつ、前記シフトアクチュエータのシリンダは、前記スプールが変速によりストロークしても常に前記磁石を覆うように形成したことを特徴とする自動マニュアルトランスミッションのシフト位置検出装置。 - 請求項1に記載された自動マニュアルトランスミッションのシフト位置検出装置において、
前記シフトアクチュエータのスプールは、所定の隙間を介してシフトブラケットに回転止め状態で結合され、
前記磁石と前記磁束検出器は、前記シフトブラケットに対する隙間介在結合による前記スプールの周方向ガタを許容する配置としたことを特徴とする自動マニュアルトランスミッションのシフト位置検出装置。 - 請求項2に記載された自動マニュアルトランスミッションのシフト位置検出装置において、
前記磁石は、スプール中心軸からの周方向に占有する角度範囲を、前記スプールの周方向ガタによる最大角度範囲以上に設定したことを特徴とする自動マニュアルトランスミッションのシフト位置検出装置。 - 請求項3に記載された自動マニュアルトランスミッションのシフト位置検出装置において、
前記磁石は、スプール軸方向に対しストローク量以上の取付け間隔を持たせて2個設定したことを特徴とする自動マニュアルトランスミッションのシフト位置検出装置。 - 請求項2乃至4の何れか1項に記載された自動マニュアルトランスミッションのシフト位置検出装置において、
前記磁石は、スプール軸直交方向の断面形状を、周方向両端面が径方向と略一致し、かつ、磁石厚みが均等である扇形状とし、ラジアル方向着磁により磁力を均等に付与したことを特徴とする自動マニュアルトランスミッションのシフト位置検出装置。 - 請求項2乃至4の何れか1項に記載された自動マニュアルトランスミッションのシフト位置検出装置において、
前記磁石は、スプール軸直交方向の断面形状を、内周側長さと外周側長さを略同等にし、かつ、磁石厚みが均等である円弧形状とし、ストレート方向着磁により磁力を均等に付与したことを特徴とする自動マニュアルトランスミッションのシフト位置検出装置。 - 請求項2乃至4の何れか1項に記載された自動マニュアルトランスミッションのシフト位置検出装置において、
前記磁石は、スプール軸直交方向の断面形状を、内周側長さを外周側長より長く設定し、かつ、磁石の中央部の厚みが薄く両端部が厚い不均等厚による円弧形状とし、ストレート方向着磁により不均等厚に応じて磁力を不均等に付与したことを特徴とする自動マニュアルトランスミッションのシフト位置検出装置。 - 請求項2乃至4の何れか1項に記載された自動マニュアルトランスミッションのシフト位置検出装置において、
前記磁石は、スプール軸直交方向の断面形状を、磁石厚みが均等厚による方形状とし、ストレート方向着磁により磁力を均等に付与したことを特徴とする自動マニュアルトランスミッションのシフト位置検出装置。 - 請求項2乃至4の何れか1項に記載された自動マニュアルトランスミッションのシフト位置検出装置において、
前記磁石は、スプール軸直交方向の断面形状を、磁石厚みが均等厚による方形状とし、ストレート方向着磁により磁力を均等に付与し、かつ、磁束検出器に対向する磁石表面に、厚み設定により中心部よりも両端部からの磁力が強くなる整磁板を設けたことを特徴とする自動マニュアルトランスミッションのシフト位置検出装置。 - 請求項1乃至9の何れか1項に記載された自動マニュアルトランスミッションのシフト位置検出装置において、
前記自動マニュアルトランスミッションは、奇数変速段グループの選択時に締結される第1クラッチと、偶数変速段グループの選択時に締結される第2クラッチと、を備えたツインクラッチ式自動マニュアルトランスミッションであり、
前記磁石と前記磁束検出器は、奇数変速段と偶数変速段を得る複数のシフトアクチュエータに適用されることを特徴とする自動マニュアルトランスミッションのシフト位置検出装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005225380A JP4877905B2 (ja) | 2005-08-03 | 2005-08-03 | 自動マニュアルトランスミッションのシフト位置検出装置 |
| EP06015920A EP1750037B1 (en) | 2005-08-03 | 2006-07-31 | Shift position sensor of automated manual transmission |
| US11/497,533 US7624659B2 (en) | 2005-08-03 | 2006-08-02 | Shift position sensor of automated manual transmission |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005225380A JP4877905B2 (ja) | 2005-08-03 | 2005-08-03 | 自動マニュアルトランスミッションのシフト位置検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007040407A true JP2007040407A (ja) | 2007-02-15 |
| JP4877905B2 JP4877905B2 (ja) | 2012-02-15 |
Family
ID=37402541
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005225380A Expired - Lifetime JP4877905B2 (ja) | 2005-08-03 | 2005-08-03 | 自動マニュアルトランスミッションのシフト位置検出装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7624659B2 (ja) |
| EP (1) | EP1750037B1 (ja) |
| JP (1) | JP4877905B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2068046A2 (en) | 2007-12-05 | 2009-06-10 | Nissan Motor Co., Ltd. | Shift position detecting device for gear selection mechanism of automotive transmission |
| JP2010101346A (ja) * | 2008-10-21 | 2010-05-06 | Nissan Motor Co Ltd | 車両用手動変速作動制御装置 |
| JP2011506891A (ja) * | 2007-12-17 | 2011-03-03 | エッセ・セ2エヌ | 車両ギアボックスの位置センサ、及びそれを備える車両ギアボックス |
| WO2014038297A1 (ja) | 2012-09-10 | 2014-03-13 | 日産自動車株式会社 | 自動マニュアルトランスミッション搭載車のアイドルストップ制御装置 |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4856509B2 (ja) * | 2006-09-29 | 2012-01-18 | 本田技研工業株式会社 | 変速装置 |
| US8893571B2 (en) * | 2007-08-17 | 2014-11-25 | Steering Solutions Ip Holding Corporation | Transmission shift assembly for a vehicle and a method of monitoring the same |
| DE102008014504A1 (de) * | 2008-03-15 | 2009-09-17 | Wabco Gmbh | Getriebesteller |
| DE102008050773A1 (de) * | 2008-09-18 | 2010-03-25 | Daimler Ag | Getriebeeinheit |
| US8258779B2 (en) * | 2008-11-26 | 2012-09-04 | Deere & Company | Transmission shift rail position sensor |
| CN102059942B (zh) * | 2009-11-11 | 2013-05-29 | 比亚迪股份有限公司 | 一种混合动力驱动系统 |
| CN102410367B (zh) * | 2011-09-20 | 2014-08-27 | 东风汽车公司 | 一种选档位置反馈装置 |
| CN102758912B (zh) * | 2012-07-26 | 2014-12-31 | 上海中科深江电动车辆有限公司 | 用于电动汽车的换挡系统 |
| CN103573852B (zh) * | 2012-08-02 | 2017-03-01 | 伊顿公司 | 用于动力传输单元的双活塞式断开装置 |
| KR101383723B1 (ko) * | 2012-12-12 | 2014-04-08 | 현대자동차(주) | 자동화 수동변속기의 액츄에이터 기준위치 설정방법 |
| DE102013101503A1 (de) * | 2013-02-14 | 2014-08-14 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Fahrzeuggetriebe, Verfahren und Sensorvorrichtung zum Erfassen einer Schaltstellung eines Fahrzeuggetriebes |
| DE102013205071B4 (de) * | 2013-03-22 | 2019-08-01 | Schaeffler Technologies AG & Co. KG | Schaltvorrichtung für ein Zahnräderwechselgetriebe eines Kraftfahrzeugs und Linearwälzlager mit einer Schaltvorrichtung |
| JP6244175B2 (ja) * | 2013-11-08 | 2017-12-06 | 本田技研工業株式会社 | シフトアクチュエータ |
| DE102014218311A1 (de) * | 2014-09-12 | 2016-03-17 | Volkswagen Aktiengesellschaft | Zwischenradanordnung für ein Kraftfahrzeuggetriebe |
| DE102014218495A1 (de) * | 2014-09-16 | 2015-11-12 | Schaeffler Technologies AG & Co. KG | Sensorvorrichtung für ein Schaltgetriebe sowie Schaltgetriebe mit der Sensorvorrichtung |
| US9644725B2 (en) | 2015-06-26 | 2017-05-09 | Magna Powertrain Of America, Inc. | Shift system for power transfer unit using non-contacting position sensor |
| JP2017067480A (ja) * | 2015-09-28 | 2017-04-06 | メレキシス テクノロジーズ エヌ ヴィ | 変位検出装置及び無段変速装置 |
| EP3458805B1 (en) * | 2016-05-17 | 2020-09-23 | Kongsberg Inc. | System, method and object for high accuracy magnetic position sensing |
| DE102016111097B4 (de) * | 2016-06-17 | 2026-01-22 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Sensoranordnung zur Winkelerfassung und Schaltgetriebe |
| EP3551982A4 (en) | 2016-12-12 | 2020-08-05 | Kongsberg Inc. | DOUBLE BAND MAGNETOELASTIC TORQUE SENSOR |
| US9976650B1 (en) | 2017-02-01 | 2018-05-22 | Deere & Company | Forkless synchronizer with sensor rail arrangement |
| US10983019B2 (en) | 2019-01-10 | 2021-04-20 | Ka Group Ag | Magnetoelastic type torque sensor with temperature dependent error compensation |
| US12292350B2 (en) | 2019-09-13 | 2025-05-06 | Brp Megatech Industries Inc. | Magnetoelastic torque sensor assembly for reducing magnetic error due to harmonics |
| JP6965318B2 (ja) | 2019-09-30 | 2021-11-10 | 本田技研工業株式会社 | 変速機のシフトドラム角度検出装置 |
| WO2021161066A1 (en) | 2020-02-11 | 2021-08-19 | Ka Group Ag | Magnetoelastic torque sensor with local measurement of ambient magnetic field |
| CN112901772A (zh) * | 2021-03-05 | 2021-06-04 | 江苏沃得农业机械配件制造有限公司 | 一种用于变速箱的气动换挡总成 |
| EP4617530A1 (en) * | 2024-03-13 | 2025-09-17 | Kongsberg Automotive Holding 2 AS | Gear shift actuator |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5111521A (en) * | 1974-07-19 | 1976-01-29 | Matsushita Electric Industrial Co Ltd | Hyojisochi |
| JPS57192660A (en) * | 1981-05-25 | 1982-11-26 | Mazda Motor Corp | Speed control for compound clutch type multistage geared speed changer |
| JPS62221925A (ja) * | 1986-03-24 | 1987-09-30 | Fuji Tool & Die Co Ltd | 変速操作機構 |
| JPH08320054A (ja) * | 1995-05-24 | 1996-12-03 | Toyota Motor Corp | 歯車式変速装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5782949A (en) * | 1980-11-12 | 1982-05-24 | Hitachi Ltd | Electromagnetic focusing type cathode ray tube |
| US5038627A (en) * | 1990-04-25 | 1991-08-13 | Dana Corporation | Vehicle transmission with manually shifted lower gears and automatically shifted upper gears |
| JPH04171359A (ja) * | 1990-11-02 | 1992-06-18 | Jidosha Kiki Co Ltd | 変速機操作装置 |
| US5450009A (en) * | 1990-12-28 | 1995-09-12 | Kabushiki Kaisha Komatsu Seisakusho | Magnetic sensor and structure of its mounting |
| DE9101734U1 (de) * | 1991-02-15 | 1991-05-23 | Hygrama Ag, Rotkreuz | Druckmittelzylinder |
| DE4334811A1 (de) * | 1993-10-13 | 1995-04-20 | Festo Kg | Positionserfassungsvorrichtung an einem Linearantrieb |
| DE4309027A1 (de) * | 1993-03-20 | 1994-09-22 | Fichtel & Sachs Ag | Stellzylinder |
| CA2119828C (en) | 1993-03-25 | 1997-10-28 | Junichi Kawabata | Liquid crystal material, liquid crystal composition and liquid crystal element |
| US5743143A (en) * | 1996-08-09 | 1998-04-28 | Eaton Corporation | Transmission shifting mechanism and position sensor |
| WO2000068601A1 (de) * | 1999-05-11 | 2000-11-16 | Siemens Aktiengesellschaft | Elektronisch-hydraulische steuereinrichtung für getriebe von fahrzeugen, vorzugsweise von kraftfahrzeugen |
| US6753680B2 (en) * | 2000-11-29 | 2004-06-22 | Ronald J. Wolf | Position sensor |
| US7221151B2 (en) * | 2003-01-31 | 2007-05-22 | Delphi Technologies, Inc. | Magnetic array position sensor |
| JP2006029441A (ja) * | 2004-07-15 | 2006-02-02 | Nissan Motor Co Ltd | シフトフォークの位置検知装置 |
| EP1729040A1 (en) * | 2005-06-02 | 2006-12-06 | HOERBIGER Antriebstechnik GmbH | Gear actuation control device |
| DE102006011207A1 (de) * | 2006-03-02 | 2007-09-06 | Getrag Getriebe- Und Zahnradfabrik Hermann Hagenmeyer Gmbh & Cie Kg | Sensoranordnung und Schaltanordnung |
-
2005
- 2005-08-03 JP JP2005225380A patent/JP4877905B2/ja not_active Expired - Lifetime
-
2006
- 2006-07-31 EP EP06015920A patent/EP1750037B1/en active Active
- 2006-08-02 US US11/497,533 patent/US7624659B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5111521A (en) * | 1974-07-19 | 1976-01-29 | Matsushita Electric Industrial Co Ltd | Hyojisochi |
| JPS57192660A (en) * | 1981-05-25 | 1982-11-26 | Mazda Motor Corp | Speed control for compound clutch type multistage geared speed changer |
| JPS62221925A (ja) * | 1986-03-24 | 1987-09-30 | Fuji Tool & Die Co Ltd | 変速操作機構 |
| JPH08320054A (ja) * | 1995-05-24 | 1996-12-03 | Toyota Motor Corp | 歯車式変速装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2068046A2 (en) | 2007-12-05 | 2009-06-10 | Nissan Motor Co., Ltd. | Shift position detecting device for gear selection mechanism of automotive transmission |
| EP2068046A3 (en) * | 2007-12-05 | 2011-09-14 | Nissan Motor Co., Ltd. | Shift position detecting device for gear selection mechanism of automotive transmission |
| US8224543B2 (en) | 2007-12-05 | 2012-07-17 | Nissan Motor Co., Ltd. | Shift position detecting device for gear selection mechanism of automotive transmission |
| JP2011506891A (ja) * | 2007-12-17 | 2011-03-03 | エッセ・セ2エヌ | 車両ギアボックスの位置センサ、及びそれを備える車両ギアボックス |
| JP2010101346A (ja) * | 2008-10-21 | 2010-05-06 | Nissan Motor Co Ltd | 車両用手動変速作動制御装置 |
| WO2014038297A1 (ja) | 2012-09-10 | 2014-03-13 | 日産自動車株式会社 | 自動マニュアルトランスミッション搭載車のアイドルストップ制御装置 |
| US9464715B2 (en) | 2012-09-10 | 2016-10-11 | Nissan Motor Co., Ltd. | Idle stop control device for vehicle equipped with automated manual transmission |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4877905B2 (ja) | 2012-02-15 |
| EP1750037B1 (en) | 2011-12-14 |
| US7624659B2 (en) | 2009-12-01 |
| EP1750037A2 (en) | 2007-02-07 |
| EP1750037A3 (en) | 2010-04-21 |
| US20070028709A1 (en) | 2007-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4877905B2 (ja) | 自動マニュアルトランスミッションのシフト位置検出装置 | |
| US7845247B2 (en) | Shift fork actuation system for control of synchronizer position | |
| US8156837B2 (en) | Multiple-ratio transmission with concentric offset shift forks | |
| EP1617109B1 (en) | Shift fork position detecting device for manual transmission | |
| US7644638B2 (en) | Automatic transmission | |
| CN102162520B (zh) | 多路机电致动器机构 | |
| JP5702229B2 (ja) | 変速機の油圧供給装置 | |
| JP4938553B2 (ja) | ツインクラッチ装置 | |
| EP1586797A2 (en) | Parking mechanism for transmission | |
| US6422104B2 (en) | Apparatus for setting selection gate positions for change speed in automatic gear transmission | |
| JP2007040409A (ja) | 自動マニュアルトランスミッションの変速制御装置 | |
| JP4931416B2 (ja) | 自動マニュアルトランスミッションのインターロック防止装置 | |
| JP4252905B2 (ja) | 変速機 | |
| EP1355086B1 (en) | Automatic transmission for vehicle | |
| US8224543B2 (en) | Shift position detecting device for gear selection mechanism of automotive transmission | |
| JP2001065689A (ja) | 変速機のコントロール装置 | |
| JP3368021B2 (ja) | 電子制御変速機 | |
| JP4862468B2 (ja) | シフトアクチュエータ | |
| JP2004060752A (ja) | 車両用変速機の変速切換機構 | |
| US5476164A (en) | Solenoid actuated mechanical clutch | |
| JP4946217B2 (ja) | スプールバルブ | |
| JP2003278808A (ja) | 自動変速装置 | |
| JPH07127740A (ja) | 電子制御変速機 | |
| JP2005164029A (ja) | 車両用変速機 | |
| CN114718966A (zh) | 双离合器自动电控离合器执行机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080625 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110412 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110531 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111122 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111124 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4877905 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141209 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |