JP2006135013A - 実装装置及び実装方法 - Google Patents
実装装置及び実装方法 Download PDFInfo
- Publication number
- JP2006135013A JP2006135013A JP2004320748A JP2004320748A JP2006135013A JP 2006135013 A JP2006135013 A JP 2006135013A JP 2004320748 A JP2004320748 A JP 2004320748A JP 2004320748 A JP2004320748 A JP 2004320748A JP 2006135013 A JP2006135013 A JP 2006135013A
- Authority
- JP
- Japan
- Prior art keywords
- chip
- area
- image
- wafer
- wafer table
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Abstract
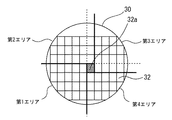
【解決手段】 複数のチップが形成されたウェハをウェハテーブルに載置し、ウェハ内の複数のチップのいずれかを突上部により押し上げ、押し上げられたチップを保持して基板上に装着する。この装着の際には、ウェハ面内を、ウェハの中心付近にあるチップを中心チップとして、中心チップの4辺を、それぞれ一方向に、かつ、対向する2辺については互いに別の方向に、延びるように延長させた延長線により分けた4つのエリアに分割する。そして、このエリアのうちいずれか1のエリアが、ウェハテーブルの所定の移動範囲内に位置するように、ウェハテーブルを基準位置から所定の角度回転させて、移動範囲内に移動されたエリア毎に、チップの装着を行う。
【選択図】 図1
Description
また、以下の実施の形態において各要素の個数、数量、量、範囲等の数に言及する場合、特に明示した場合や原理的に明らかにその数に特定される場合を除いて、その言及した数に限定されるものではない。また、実施の形態において説明する構造や、方法におけるステップ等は、特に明示した場合や明らかに原理的にそれに特定される場合を除いて、この発明に必ずしも必須のものではない。
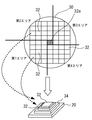
図1は、この発明の実施の形態1におけるダイボンディング装置を説明するための模式図である。また、図2は、実施の形態1におけるダイボンディング装置において処理するウェハについて説明するための上面図である。
図1を参照して、ダイボンディング装置100において、ウェハテーブル2の上方には、認識カメラ4及びピックアップユニット6が設けられ、ウェハテーブル2の下方には、突上ユニット4が設置されている。
認識カメラ4は、ウェハテーブル2上のチップの画像を必要に応じて取得することができる。
また、ウェハテーブル2とは異なる場所に、リードフレーム台20が設けられている。
また、認識カメラ4は、ウェハステージ2の処理範囲内のボンディング対象となっているチップ32の画像を認識することができる。なお、以下簡略化のため、ボンディング対象となっているチップを、「対象チップ」と称することとする。
以下、図3、図4を参照して、ウェハ30のボンディング処理を行う手順について説明する。
但し、このとき、第2エリアのチップ32は、通常の状態から、左周りに90度回転した状態となっている。このため、ピックアップ動作(ステップS8)の際には、ピックアップユニット6は、その吸着部10を回転軸により、予め、左回りに90度回転させておく。そして、ピックアップ後、その移動の過程において(ステップS10)、回転させた吸着部10を元の位置に戻す。これにより、吸着部10及び保持されたチップ32は、右回りに90度回転し、チップ32は、ウェハステージ2の回転によるズレが修正され、通常の位置に戻された状態となる。この状態で、チップ32は、リードフレーム34にボンディングされる(ステップS12)。
例えば、図5に示すように、中心チップ32aが中心にない場合、例えば、チップが、X方向、Y方向にそれぞれ、偶数枚ずつ配置されているような場合であっても、中心付近にあるチップ32を中心チップ32aとして決め、これを基準とすることができる。そして、このチップ32aの中心を回転軸とする。また、チップの形状が異なっているようなものが複数個配置されている場合には、ウェハ30の中心に近いチップを中心チップ32aとすればよい。このように、実施の形態1は、ウェハ30に、奇数枚、偶数枚のチップが配置されているいずれの場合にも、また、形状の異なるチップが配置されている場合にも、適用することができる。
図6は、この発明の実施の形態2におけるウェハを説明するための上面図である。
実施の形態2におけるダイボンディング方法は、実施の形態1において説明したものと同様である。但し、実施の形態2においては、制御装置18により、各チップの位置合わせの際に用いるテンプレート画像を、各エリアごとに、基準画像から算出して登録する。
図7は、この発明の実施の形態3におけるウェハ30を説明するための上面図である。また、図8は、この発明の実施の形態3において、ウェハ30からピックアップしたチップを積層する場合の状態を説明するための模式図である。
図9は、この発明の実施の形態4におけるボンディング方法における、不良チップの特定方法について説明するための模式図である。
例えば、半導体チップに不良が発生している場合に、不良識別マークが用いられず、ウェハのIDなどをキー情報として、ウェハの良品/不良マップで処理する場合がある(以下、「マップデータ」と称する)。実施の形態4では、このようなマップデータを、認識する方法について説明する。
制御手段18は、この基点を中心にして、ウェハとマップデータを重ね合わせて、各エリアごとに不良チップを特定しながら、処理を行う。
また特徴的なターゲットを予め準備させておいて、このパターンを認識させることによりマップデータとウェハとを重ね合わせるものとしてもよい。また、予め登録された中心チップ32aをウェハの基点と求めるために用いることも考えられる。
4 認識カメラ
6 ピックアップユニット
8 突上ユニット
10 吸引部
12 回転軸
14 回転軸
16 駆動手段
18 制御手段
20 リードフレーム台
30 ウェハ
32 チップ
32a 中心チップ
34 リードフレーム
Claims (9)
- ウェハ内の複数個に分割されたチップを保持し、基板に装着する実装装置であって、
前記ウェハを載置するウェハテーブルと、
前記ウェハテーブルに載置された前記ウェハ内の複数のチップのいずれかを押し上げる突上部と、
前記突上部に押し上げられたチップを保持して、前記基板上に移動する保持部と、
を備え、
前記ウェハテーブルは、
前記ウェハ内の複数のチップのうち、装着の対象となるチップが、前記突上部上方に位置するように、所定の移動範囲内で、前記ウェハを移動させる駆動機構と、
前記ウェハ面内を、前記ウェハの中心付近にあるチップを中心チップとして、前記中心チップの4辺を、それぞれ一方向に、かつ、対向する2辺については互いに別の方向に、延びるように延長させた延長線により4つのエリアに分けた場合に、前記エリアのうちいずれか1のエリアが、前記ウェハテーブルの前記所定の移動範囲内に位置するように、前記ウェハテーブルを基準位置から所定の角度回転させるテーブル回転機構と、
を備えることを特徴とする実装装置。 - 前記保持部は、保持した前記チップを、前記基準位置に戻すように回転させる保持部回転機構を備えることを特徴とする請求項1に記載の実装装置。
- 前記実装装置は、
前記ウェハテーブルの前記所定の移動範囲内にある前記エリアの画像を認識できる認識カメラと、
前記認識カメラにより認識された前記エリアの画像から、基準となるチップの画像を基準画像として登録し、前記4つのエリアのそれぞれに対する前記ウェハテーブルの回転角度に応じて、前記基準画像を、それぞれ、0度、90度、180度、270度に回転させた画像を、前記各エリアに対応するテンプレート画像として登録し、
前記認識カメラにより認識された前記エリアの画像と、前記登録された前記エリアに対応するテンプレート画像とを比較して、前記ウェハテーブルを所定の位置に移動して、位置合わせを行う制御部と、
を備えることを特徴とする請求項1又は2に記載の実装装置。 - 前記実装装置は、
前記ウェハテーブルの前記所定の移動範囲内にある前記エリアの画像を認識できる認識カメラと、
前記認識カメラにより認識された前記4つのエリアの各画像から、それぞれ1つずつ、基準となるチップを選択し、前記各チップの画像を、前記各エリアに対応するテンプレート画像として登録し、
前記認識カメラにより認識された画像と、前記予め登録された前記各エリアに対応するテンプレート画像とを比較して、前記ウェハテーブルを所定の位置に移動する制御部と、
を備えることを特徴とする請求項1又は2に記載の実装装置。 - 前記実装装置は、
前記ウェハテーブルの移動範囲内にある前記エリアの画像を認識できる認識カメラと、
前記ウェハテーブルを所定の位置に移動する制御部と、
を備え、
前記制御部は、前記ウェハ中の前記チップ中の不良チップを特定する、前記ウェハ全面に関するデータマップを有し、
前記ウェハの各エリアの、前記中心チップからのチップの数を登録し、前記データマップの前記中心チップに対応する位置を、前記登録されたチップ数から割り出して、前記認識カメラにより認識された画像と、前記データマップとを重ねて、不良チップの位置を特定することを特徴とする請求項1〜4のいずれかに記載の実装装置。 - 複数のチップが形成されたウェハをウェハテーブルに載置し、保持部により1のチップを取り上げ、基板に装着する実装方法において、
前記ウェハの中心付近の1のチップを中心チップとして選択し、
前記中心チップの4辺を、それぞれ一方向に、かつ、対向する2辺については互いに別の方向に、延びるように延長させた延長線により、前記ウェハ面内を、前記中心チップに接する中心角が90度である第1、第2、第3、第4エリアに分割し、
前記第1エリアが、前記ウェハテーブルの所定の移動範囲内に配置されるようにして、前記1エリア内の前記チップを、それぞれ、前記保持部により前記基板に装着した後、
前記ウェハテーブルを90度回転させて前記第2エリアが前記所定の移動範囲内に配置されるようにし、前記第2エリア内の前記各チップを、前記保持部により保持した状態で前記ウェハテーブルの回転と逆の方向に90度回転させて、前記基板に装着し、
前記ウェハテーブルを90度回転させて、前記第3エリアが前記所定の移動範囲内に配置されるようにし、前記第3エリア内の前記各チップを、前記保持部により保持した状態で前記ウェハテーブルの回転と逆の方向に180度回転させて、前記基板に装着し、
前記ウェハテーブルを90度回転させて、前記第4エリアが前記所定の移動範囲内に配置されるようにし、前記第4エリア内の前記各チップを、前記保持部により保持した状態で前記ウェハテーブルの回転と逆の方向に270度回転させ、前記基板に装着し、
前記中心チップを、前記保持部により保持した状態で前記ウェハテーブルの回転と逆の方向に270度回転させ、前記保持部により前記基板に装着する、
ことを特徴とする実装方法。 - 前記第1エリアの前記チップ装着前に、認識カメラにより、前記第1エリアの画像を取得し、
前記取得された画像から、基準となるチップの画像を第1テンプレート画像として登録し、
前記第1テンプレート画像を、それぞれ、90度、180度、270度に回転させた画像を、それぞれ、第2、第3、第4テンプレート画像として登録し、
前記第1エリア内の装着対象となるチップごとに、前記1エリアの画像と、前記第1テンプレート画像とを比較して、前記ウェハテーブルを移動して位置合わせを行った後、前記装着対象のチップの装着を行い、
前記第2エリアの前記チップ装着前に、前記認識カメラにより、前記第2エリアの画像を取得し、
前記第2エリア内の装着対象となるチップごとに、前記2エリアの画像と、前記第2テンプレート画像とを比較して、前記ウェハテーブルを移動して位置合わせを行った後、前記装着対象のチップの装着を行い、
前記第3エリアのチップ装着前に、前記認識カメラにより、前記第3エリアの画像を取得し、
前記第3エリア内の装着対象となるチップごとに、前記第3エリアの画像と、前記第3テンプレート画像とを比較して、前記ウェハテーブルを移動して位置合わせを行った後、前記装着対象のチップの装着を行い、
前記第4エリアのチップ装着前に、前記認識カメラにより、前記第4エリアの画像を取得し、
前記第4エリア内の装着対象となるチップごとに、前記第4エリアの画像と、前記第4テンプレート画像とを比較して、前記ウェハテーブルを移動して位置合わせを行った後、前記装着対象のチップの装着を行うことを特徴とする請求項6に記載の実装方法。 - 前記第1エリアのチップ装着前に、認識カメラにより、前記第1エリアの画像を取得し、
前記第1エリアの画像から、基準となるチップの画像を第1テンプレート画像として登録し、
前記第1エリアの装着対象となるチップごとに、前記第1テンプレート画像と、前記第1エリアの画像とを比較して、前記ウェハテーブルを移動して位置合わせを行った後、前記装着対象のチップの装着を行い、
前記第2エリアのチップ装着前に、前記認識カメラにより、前記第2エリアの画像を取得し、
前記第2エリアの画像から、基準となるチップの画像を第2テンプレート画像として登録し、
前記第2エリアの装着対象となるチップごとに、前記第2テンプレート画像と、前記第2エリアの画像とを比較して、前記ウェハテーブルを移動して位置合わせを行った後、前記装着対象のチップの装着を行い、
前記第3エリアのチップ装着前に、前記認識カメラにより、前記第3エリアの画像を取得し、
前記第3エリアの画像から、基準となるチップの画像を第3テンプレート画像として登録し、
前記第3エリアの装着対象となるチップごとに、前記第3テンプレート画像と、前記第3エリアの画像とを比較して、前記ウェハテーブルを移動して位置合わせを行った後、前記装着対象のチップの装着を行い、
前記第4エリアのチップ装着前に、前記認識カメラにより、前記第4エリアの画像を取得し、
前記第4エリアの画像から、基準となるチップの画像を第4テンプレート画像として登録し、
前記第4エリアの装着対象となるチップごとに、前記第4テンプレート画像と、前記第4エリアの画像とを比較して、前記ウェハテーブルを移動して位置合わせを行った後、前記装着対象のチップの装着を行うことを特徴とする請求項6に記載の実装方法。 - 前記各エリアの画像を、認識カメラにより取得し、
前記ウェハの、前記中心チップからの前記チップの数を前記エリアごとに数えて、前記各エリアの前記チップ数を登録し、
前記ウェハ内のチップ中の不良チップを特定する、ウェハ全面に関するデータマップの、前記中心チップに対応する位置を、前記登録されたチップ数から割り出して、
前記各エリアの画像と、前記データマップとを重ねて、前記不良チップを特定することを特徴とする請求項6〜8のいずれかに記載の実装方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004320748A JP2006135013A (ja) | 2004-11-04 | 2004-11-04 | 実装装置及び実装方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004320748A JP2006135013A (ja) | 2004-11-04 | 2004-11-04 | 実装装置及び実装方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006135013A true JP2006135013A (ja) | 2006-05-25 |
| JP2006135013A5 JP2006135013A5 (ja) | 2007-12-20 |
Family
ID=36728301
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004320748A Pending JP2006135013A (ja) | 2004-11-04 | 2004-11-04 | 実装装置及び実装方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006135013A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012175037A (ja) * | 2011-02-24 | 2012-09-10 | Hitachi High-Tech Instruments Co Ltd | ダイボンダ及び半導体製造方法 |
| KR20130029707A (ko) * | 2011-09-15 | 2013-03-25 | 가부시끼가이샤 히다찌 하이테크 인스트루먼츠 | 다이 본더 및 본딩 방법 |
| JP2017092315A (ja) * | 2015-11-12 | 2017-05-25 | 富士機械製造株式会社 | 電子部品装着機 |
| KR20170121909A (ko) * | 2016-04-26 | 2017-11-03 | 세메스 주식회사 | 웨이퍼 상에 다이들을 본딩하기 위한 장치 및 방법 |
| DE102016116345A1 (de) | 2016-09-01 | 2018-03-01 | Infineon Technologies Ag | Verfahren für das zusammenbauen von halbleiterbauelementen |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6057942A (ja) * | 1983-09-09 | 1985-04-03 | Toshiba Corp | ペレツトマウント装置 |
| JPS62295431A (ja) * | 1986-06-13 | 1987-12-22 | Nichiden Mach Ltd | ワ−クピツクアツプ装置 |
| JPH03294976A (ja) * | 1990-04-13 | 1991-12-26 | Matsushita Electric Ind Co Ltd | 基準マークパターン検出装置 |
| JPH0722475A (ja) * | 1993-06-29 | 1995-01-24 | Oki Electric Ind Co Ltd | ダイボンディング方法およびダイボンダ |
| JP2001196444A (ja) * | 1999-08-27 | 2001-07-19 | Matsushita Electric Ind Co Ltd | 整列部品の取扱方法及び装置 |
| JP2004055645A (ja) * | 2002-07-17 | 2004-02-19 | Hitachi High-Tech Instruments Co Ltd | ダイピックアップ装置及びダイピックアップ方法 |
-
2004
- 2004-11-04 JP JP2004320748A patent/JP2006135013A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6057942A (ja) * | 1983-09-09 | 1985-04-03 | Toshiba Corp | ペレツトマウント装置 |
| JPS62295431A (ja) * | 1986-06-13 | 1987-12-22 | Nichiden Mach Ltd | ワ−クピツクアツプ装置 |
| JPH03294976A (ja) * | 1990-04-13 | 1991-12-26 | Matsushita Electric Ind Co Ltd | 基準マークパターン検出装置 |
| JPH0722475A (ja) * | 1993-06-29 | 1995-01-24 | Oki Electric Ind Co Ltd | ダイボンディング方法およびダイボンダ |
| JP2001196444A (ja) * | 1999-08-27 | 2001-07-19 | Matsushita Electric Ind Co Ltd | 整列部品の取扱方法及び装置 |
| JP2004055645A (ja) * | 2002-07-17 | 2004-02-19 | Hitachi High-Tech Instruments Co Ltd | ダイピックアップ装置及びダイピックアップ方法 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012175037A (ja) * | 2011-02-24 | 2012-09-10 | Hitachi High-Tech Instruments Co Ltd | ダイボンダ及び半導体製造方法 |
| KR20130029707A (ko) * | 2011-09-15 | 2013-03-25 | 가부시끼가이샤 히다찌 하이테크 인스트루먼츠 | 다이 본더 및 본딩 방법 |
| JP2013065627A (ja) * | 2011-09-15 | 2013-04-11 | Hitachi High-Tech Instruments Co Ltd | ダイボンダ及びボンディング方法 |
| CN107359131A (zh) * | 2011-09-15 | 2017-11-17 | 捷进科技有限公司 | 芯片接合机以及接合方法 |
| TWI608556B (zh) * | 2011-09-15 | 2017-12-11 | 捷進科技有限公司 | Die bonder and bonding method |
| KR101977987B1 (ko) * | 2011-09-15 | 2019-05-13 | 파스포드 테크놀로지 주식회사 | 다이 본더 및 본딩 방법 |
| JP2017092315A (ja) * | 2015-11-12 | 2017-05-25 | 富士機械製造株式会社 | 電子部品装着機 |
| KR20170121909A (ko) * | 2016-04-26 | 2017-11-03 | 세메스 주식회사 | 웨이퍼 상에 다이들을 본딩하기 위한 장치 및 방법 |
| KR102580580B1 (ko) | 2016-04-26 | 2023-09-20 | 세메스 주식회사 | 웨이퍼 상에 다이들을 본딩하기 위한 장치 및 방법 |
| DE102016116345A1 (de) | 2016-09-01 | 2018-03-01 | Infineon Technologies Ag | Verfahren für das zusammenbauen von halbleiterbauelementen |
| DE102016116345B4 (de) * | 2016-09-01 | 2018-05-09 | Infineon Technologies Ag | Verfahren für das zusammenbauen von halbleiterbauelementen |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6510838B2 (ja) | ボンディング装置及びボンディング方法 | |
| KR102132094B1 (ko) | 전자 부품 실장 장치 및 전자 부품 실장 방법 | |
| US10694651B2 (en) | Chip-placing method performing an image alignment for chip placement and chip-placing apparatus thereof | |
| JP7208732B2 (ja) | アライメント方法 | |
| US11295996B2 (en) | Systems and methods for bonding semiconductor elements | |
| JP2006135013A (ja) | 実装装置及び実装方法 | |
| JP4122170B2 (ja) | 部品実装方法及び部品実装装置 | |
| US20210020483A1 (en) | Die pickup method | |
| JP4314021B2 (ja) | ウェハの中心検出方法、並びに半導体チップのピックアップ方法及び装置 | |
| JP7178782B2 (ja) | 電子部品の実装装置および実装方法 | |
| JP2009054964A (ja) | ウェハ移載装置と、これを有する半導体製造装置 | |
| JP5006357B2 (ja) | ボンディング方法およびボンディング装置 | |
| JP4262171B2 (ja) | 半導体チップの実装装置及び実装方法 | |
| JP2006041006A (ja) | 半導体チップのボンディング方法及び装置 | |
| JP5690535B2 (ja) | ダイボンダ及び半導体製造方法 | |
| JP4761672B2 (ja) | ボンディング方法及びボンディング装置 | |
| JP3763229B2 (ja) | 画像認識による位置検出方法 | |
| JP5181383B2 (ja) | ボンディング装置 | |
| JP7090219B2 (ja) | 位置特定方法および位置特定装置 | |
| JP2010192817A (ja) | ピックアップ方法及びピックアップ装置 | |
| JP2009117411A (ja) | 部品実装システム | |
| JP2018006510A (ja) | 部品実装装置 | |
| JP2006253384A (ja) | ボンディング装置および半導体装置の製造方法 | |
| JP2005101143A (ja) | 半導体装置の製造方法および製造装置 | |
| JP2002160347A (ja) | クリーム半田印刷装置及びその制御方法並びに記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071101 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071101 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080331 |
|
| A711 | Notification of change in applicant |
Effective date: 20100521 Free format text: JAPANESE INTERMEDIATE CODE: A712 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20100824 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A02 | Decision of refusal |
Effective date: 20101221 Free format text: JAPANESE INTERMEDIATE CODE: A02 |