JP2005294474A - 位置計測装置、位置計測方法及び露光装置 - Google Patents
位置計測装置、位置計測方法及び露光装置 Download PDFInfo
- Publication number
- JP2005294474A JP2005294474A JP2004106361A JP2004106361A JP2005294474A JP 2005294474 A JP2005294474 A JP 2005294474A JP 2004106361 A JP2004106361 A JP 2004106361A JP 2004106361 A JP2004106361 A JP 2004106361A JP 2005294474 A JP2005294474 A JP 2005294474A
- Authority
- JP
- Japan
- Prior art keywords
- variation
- imaging
- mark
- light
- image data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7088—Alignment mark detection, e.g. TTR, TTL, off-axis detection, array detector, video detection
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70775—Position control, e.g. interferometers or encoders for determining the stage position
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Abstract
【解決手段】 精度劣化を抑制した高精度の位置計測技術を提供するマークの位置を計測する位置計測装置は、撮像手段と、撮像手段により得られた画像データのばらつきを求める演算手段と、異なる受光量で撮像手段により得られた複数の画像データに関し前記演算手段によりそれぞれ求めたばらつきに基づき、前記撮像手段の受光量に関するパラメータを設定する設定手段とを備える。
【選択図】 図1A
Description
撮像手段と、
前記撮像手段により得られた画像データのばらつきを求める演算手段と、
異なる受光量で前記撮像手段により得られた複数の画像データに関し前記演算手段によりそれぞれ求めたばらつきに基づき、前記撮像手段の受光量に関するパラメータを設定する設定手段とを備えたことを特徴とする。
上記の位置計測装置を備えたことを特徴とする。
撮像手段により撮像する撮像工程と、
撮像工程において得られた画像データのばらつきを求める演算工程と、
前記撮像工程において異なる受光量で得られた複数の画像データに関し前記演算工程においてそれぞれ求めたばらつきに基づき、前記撮像手段の受光量に関するパラメータを設定する設定工程とを備えたことを特徴とする。
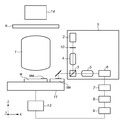
本発明にかかる位置検出方法を露光装置に適用した実施形態を説明する。図1Aは、第1実施形態にかかる露光装置の構成を示す図である。同図において、Rは電子回路パターンが形成されているレチクルであり、Wは露光基板であるウエハ、1は投影光学系である。この投影光学系1は、照明光源14より照射された投影光に基づきレチクルRの電子回路パターン像をウエハWに投影する。
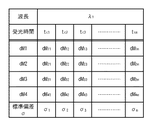
第1実施形態では最適な受光時間tcを求めるために、XYステージ11に設けられた基準マークSMと、基準マークのない面(基準面)とを観察したときの1次元のデジタル信号列のデータに基づいて最小の受光時間(tcimin)を決定していたが、本実施形態では、基準マークSMの位置計測結果のみを指標に最適な受光時間を求める。本実施形態において、XYステージ11における基準マークSMに対する1次元のデジタル信号列に基づいて撮像手段60と基準マークSMとを共役位置関係に調整する処理(図1BのステップS101〜S106)は、第1実施形態と同様に行うものとする。
第2実施形態では、最適な受光時間を求めるために、基準マークSMまたはウエハマークWMの撮像信号におけるマークスパンのばらつきを指標としていたが、本実施形態ではXYステージに設けられた基準マークSMの計測位置のばらつきを指標として最適な受光量(受光時間)を決定する。本実施形態において、撮像手段60と基準マークSMとを共役位置関係に調整する処理(図1BのステップS101〜S106)は、第1実施形態と同様に実行される。
上述の第2、第3実施形態では、基準マークSMを構成する矩形マークの間隔(スパン)や矩形マークの計測位置から最適な受光時間を求めたが、計測精度を確保できる光量トレランスを求めることも可能である。
次に上記の露光装置を利用した半導体デバイスの製造プロセスを説明する。図6は、半導体デバイスの全体的な製造プロセスのフローを示す図である。ステップ1(回路設計)では半導体デバイスの回路設計を行なう。ステップ2(マスク作製)では設計した回路パターンに基づいてマスクを作製する。一方、ステップ3(ウエハ製造)ではシリコン等の材料を用いてウエハを製造する。ステップ4(ウエハプロセス)は前工程と呼ばれ、上記のマスクとウエハを用いて、リソグラフィ技術によってウエハ上に実際の回路を形成する。次のステップ5(組み立て)は後工程と呼ばれ、ステップ4によって作製されたウエハを用いて半導体チップ化する工程であり、アッセンブリ工程(ダイシング、ボンディング)、パッケージング工程(チップ封入)等の組み立て工程を含む。ステップ6(検査)ではステップ5で作製された半導体デバイスの動作確認テスト、耐久性テスト等の検査を行なう。こうした工程を経て半導体デバイスが完成し、これを出荷(ステップ7)する。
Claims (27)
- マークの位置を計測する位置計測装置であって、
撮像手段と、
前記撮像手段により得られた画像データのばらつきを求める演算手段と、
異なる受光量で前記撮像手段により得られた複数の画像データに関し前記演算手段によりそれぞれ求めたばらつきに基づき、前記撮像手段の受光量に関するパラメータを設定する設定手段と
を備えたことを特徴とする位置計測装置。 - 前記演算手段は、前記ばらつきとして、前記画像データの標準偏差およびレンジのいずれかを求めることを特徴とする請求項1に記載の位置計測装置。
- 前記設定手段は、前記パラメータとして、前記撮像手段の蓄積時間および受光量トレランスのいずれかを設定することを特徴とする請求項1に記載の位置計測装置。
- 前記設定手段は、前記ばらつきが最小となるように前記パラメータを設定することを特徴とする請求項1に記載の位置計測装置。
- 前記設定手段は、前記ばらつきが許容値以下となるように前記パラメータを設定することを特徴とする請求項1に記載の位置計測装置。
- 前記設定手段は、前記ばらつきが許容値以下となるように、前記パラメータとして、前記撮像手段の受光量トレランスを設定することを特徴とする請求項1に記載の位置計測装置。
- 前記演算手段は、前記画像データに基づきマークの各部分間のスパンを抽出する抽出手段を含むとともに、前記ばらつきとして、前記抽出手段により抽出された複数のスパンと、前記複数のスパンにそれぞれ対応した複数の基準スパンとの間の差のばらつきを求めることを特徴とする請求項1に記載の位置計測装置。
- 前記演算手段は、前記画像データに基づきマークの各部分の位置を抽出する抽出手段を含むとともに、前記ばらつきとして、前記抽出手段により抽出された複数の位置と、前記複数の位置にそれぞれ対応した複数の基準位置との間の位置ずれのばらつきを求めることを特徴とする請求項1に記載の位置計測装置。
- 波長可変の照明手段を備えるとともに、前記設定手段は、前記照明手段の波長毎に前記パラメータを設定することを特徴とする請求項1に記載の位置計測装置。
- 基板にパターンを露光する露光装置であって、
請求項1に記載の位置計測装置を備えた
ことを特徴とする露光装置。 - 前記位置計測装置により前記基板上のマークの位置を計測することを特徴とする請求項10に記載の露光装置。
- 前記基板を支持および移動させるステージを備え、前記位置計測装置により前記ステージ上のマークの位置を計測することを特徴とする請求項10に記載の露光装置。
- 前記基板を支持および移動させるステージを備え、前記画像データは、前記撮像手段により前記ステージ上の基準面を撮像して得られたものであることを特徴とする請求項10に記載の露光装置。
- 前記演算手段は、前記画像データに基づきマークの各部分間のスパンを抽出する抽出手段を含むとともに、前記ばらつきとして、前記抽出手段により抽出された複数のスパンと、前記複数のスパンにそれぞれ対応した複数の基準スパンとの間の差のばらつきを求めることを特徴とする請求項10に記載の露光装置。
- 前記演算手段は、前記画像データに基づきマークの各部分の位置を抽出する抽出手段を含むとともに、前記ばらつきとして、前記抽出手段により抽出された複数の位置と、前記複数の位置にそれぞれ対応した複数の基準位置との間の位置ずれのばらつきを求めることを特徴とする請求項10に記載の露光装置。
- 前記マークは、前記基板上のマークであることを特徴とする請求項14または15に記載の露光装置。
- 前記基板を支持および移動させるステージを備え、前記マークは、前記ステージ上のマークであることを特徴とする請求項14または15に記載の露光装置。
- 請求項10乃至17のいずれか1項に記載の露光装置を用いて基板にパターンを露光する露光工程を含むことを特徴とするデバイス製造方法。
- マークの位置を計測する位置計測方法であって、
撮像手段により撮像する撮像工程と、
撮像工程において得られた画像データのばらつきを求める演算工程と、
前記撮像工程において異なる受光量で得られた複数の画像データに関し前記演算工程においてそれぞれ求めたばらつきに基づき、前記撮像手段の受光量に関するパラメータを設定する設定工程と
を備えたことを特徴とする位置計測方法。 - 前記演算工程において、前記ばらつきとして、前記画像データの標準偏差およびレンジのいずれかを求めることを特徴とする請求項19に記載の位置計測方法。
- 前記設定工程において、前記パラメータとして、前記撮像手段の蓄積時間および受光量トレランスのいずれかを設定することを特徴とする請求項19に記載の位置計測方法。
- 前記設定工程において、前記ばらつきが最小となるように前記パラメータを設定することを特徴とする請求項19に記載の位置計測方法。
- 前記設定工程において、前記ばらつきが許容値以下となるように前記パラメータを設定することを特徴とする請求項19に記載の位置計測方法。
- 前記設定工程において、前記ばらつきが許容値以下となるように、前記パラメータとして、前記撮像手段の受光量トレランスを設定することを特徴とする請求項19に記載の位置計測方法。
- 前記演算工程は、前記画像データに基づきマークの各部分間のスパンを抽出する抽出工程を含み、前記演算工程において、前記ばらつきとして、前記抽出工程において抽出された複数のスパンと、前記複数のスパンにそれぞれ対応した複数の基準スパンとの間の差のばらつきを求めることを特徴とする請求項19に記載の位置計測方法。
- 前記演算工程は、前記画像データに基づきマークの各部分の位置を抽出する抽出工程を含み、前記演算工程において、前記ばらつきとして、前記抽出工程において抽出された複数の位置と、前記複数の位置にそれぞれ対応した複数の基準位置との間の位置ずれのばらつきを求めることを特徴とする請求項19に記載の位置計測方法。
- 前記設定手段は、波長可変の照明手段の波長毎に前記パラメータを設定することを特徴とする請求項19に記載の位置計測方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004106361A JP3880589B2 (ja) | 2004-03-31 | 2004-03-31 | 位置計測装置、露光装置及びデバイス製造方法 |
| US11/085,545 US7126670B2 (en) | 2004-03-31 | 2005-03-22 | Position measurement technique |
| TW094109650A TWI282044B (en) | 2004-03-31 | 2005-03-28 | Position measurement technique |
| CNB2005100627748A CN100394573C (zh) | 2004-03-31 | 2005-03-30 | 位置测量技术 |
| KR1020050026866A KR100671350B1 (ko) | 2004-03-31 | 2005-03-31 | 위치계측기술 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004106361A JP3880589B2 (ja) | 2004-03-31 | 2004-03-31 | 位置計測装置、露光装置及びデバイス製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005294474A true JP2005294474A (ja) | 2005-10-20 |
| JP3880589B2 JP3880589B2 (ja) | 2007-02-14 |
Family
ID=35050052
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004106361A Expired - Fee Related JP3880589B2 (ja) | 2004-03-31 | 2004-03-31 | 位置計測装置、露光装置及びデバイス製造方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7126670B2 (ja) |
| JP (1) | JP3880589B2 (ja) |
| KR (1) | KR100671350B1 (ja) |
| CN (1) | CN100394573C (ja) |
| TW (1) | TWI282044B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008147206A (ja) * | 2006-12-05 | 2008-06-26 | Canon Inc | 露光装置及びデバイス製造方法 |
| JP2008281391A (ja) * | 2007-05-09 | 2008-11-20 | Pulstec Industrial Co Ltd | 3次元形状測定装置および3次元形状測定方法 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7085677B1 (en) * | 2004-04-19 | 2006-08-01 | Amazon Technologies, Inc. | Automatically identifying incongruous item packages |
| JP2006269497A (ja) * | 2005-03-22 | 2006-10-05 | Olympus Corp | 基板処理装置及び基板収納方法 |
| US8195792B2 (en) * | 2009-01-16 | 2012-06-05 | Microsoft Corporation | Interfacing distinct services for providing web based document manipulation access |
| JP5460662B2 (ja) * | 2011-09-07 | 2014-04-02 | 株式会社日立ハイテクノロジーズ | 領域決定装置、観察装置または検査装置、領域決定方法および領域決定方法を用いた観察方法または検査方法 |
| US9001305B2 (en) * | 2011-10-11 | 2015-04-07 | Wenhui Mei | Ultra-large size flat panel display maskless photolithography system and method |
| JP5896459B2 (ja) * | 2012-03-06 | 2016-03-30 | 東レエンジニアリング株式会社 | マーキング装置及び方法 |
| TWI585547B (zh) * | 2014-08-08 | 2017-06-01 | 斯克林集團公司 | 光學特性取得裝置、位置測定裝置、資料補正裝置、光學特性取得方法、位置測定方法及資料補正方法 |
| CN105988305B (zh) * | 2015-02-28 | 2018-03-02 | 上海微电子装备(集团)股份有限公司 | 硅片预对准方法 |
| CN114063399B (zh) * | 2020-07-31 | 2022-11-04 | 长鑫存储技术有限公司 | 光刻对准方法及系统 |
| JP2022117091A (ja) * | 2021-01-29 | 2022-08-10 | キヤノン株式会社 | 計測装置、リソグラフィ装置及び物品の製造方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2711582B2 (ja) | 1990-05-29 | 1998-02-10 | キヤノン株式会社 | 位置合わせ方法 |
| US5808910A (en) * | 1993-04-06 | 1998-09-15 | Nikon Corporation | Alignment method |
| JPH06302496A (ja) * | 1993-04-13 | 1994-10-28 | Nikon Corp | 位置合わせ方法 |
| US5754299A (en) * | 1995-01-13 | 1998-05-19 | Nikon Corporation | Inspection apparatus and method for optical system, exposure apparatus provided with the inspection apparatus, and alignment apparatus and optical system thereof applicable to the exposure apparatus |
| JP2001217174A (ja) | 2000-02-01 | 2001-08-10 | Nikon Corp | 位置検出方法、位置検出装置、露光方法、及び露光装置 |
| JP4613357B2 (ja) * | 2000-11-22 | 2011-01-19 | 株式会社ニコン | 光学的位置ずれ測定装置の調整装置および方法 |
| JP5002100B2 (ja) | 2001-09-13 | 2012-08-15 | キヤノン株式会社 | 焦点位置検出方法及び焦点位置検出装置 |
| JP4366031B2 (ja) | 2001-09-17 | 2009-11-18 | キヤノン株式会社 | 位置検出装置及び方法並びに露光装置、デバイスの製造方法 |
| JP2003218024A (ja) | 2001-11-16 | 2003-07-31 | Nikon Corp | 計測方法、結像特性調整方法、露光方法及び露光装置の製造方法 |
| WO2003104746A1 (ja) | 2002-05-31 | 2003-12-18 | 株式会社ニコン | 位置計測方法、露光方法、露光装置、並びにデバイス製造方法 |
| JP2004012598A (ja) * | 2002-06-04 | 2004-01-15 | Adtec Engineeng Co Ltd | 投影露光装置 |
| JP2004014758A (ja) | 2002-06-06 | 2004-01-15 | Nikon Corp | アライメント装置 |
| JP4315427B2 (ja) | 2003-08-07 | 2009-08-19 | キヤノン株式会社 | 位置測定方法、露光装置、及びデバイスの製造方法 |
-
2004
- 2004-03-31 JP JP2004106361A patent/JP3880589B2/ja not_active Expired - Fee Related
-
2005
- 2005-03-22 US US11/085,545 patent/US7126670B2/en not_active Expired - Lifetime
- 2005-03-28 TW TW094109650A patent/TWI282044B/zh not_active IP Right Cessation
- 2005-03-30 CN CNB2005100627748A patent/CN100394573C/zh not_active Expired - Fee Related
- 2005-03-31 KR KR1020050026866A patent/KR100671350B1/ko not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008147206A (ja) * | 2006-12-05 | 2008-06-26 | Canon Inc | 露光装置及びデバイス製造方法 |
| US7675632B2 (en) | 2006-12-05 | 2010-03-09 | Canon Kabushiki Kaisha | Exposure apparatus and device manufacturing method |
| JP2008281391A (ja) * | 2007-05-09 | 2008-11-20 | Pulstec Industrial Co Ltd | 3次元形状測定装置および3次元形状測定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US7126670B2 (en) | 2006-10-24 |
| TWI282044B (en) | 2007-06-01 |
| US20050219491A1 (en) | 2005-10-06 |
| KR20060045152A (ko) | 2006-05-16 |
| JP3880589B2 (ja) | 2007-02-14 |
| CN1677641A (zh) | 2005-10-05 |
| TW200535576A (en) | 2005-11-01 |
| KR100671350B1 (ko) | 2007-01-19 |
| CN100394573C (zh) | 2008-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101885392B1 (ko) | 검사 장치, 검사 방법, 노광 방법, 및 반도체 디바이스의 제조 방법 | |
| JP4366031B2 (ja) | 位置検出装置及び方法並びに露光装置、デバイスの製造方法 | |
| JP3880589B2 (ja) | 位置計測装置、露光装置及びデバイス製造方法 | |
| JP3937580B2 (ja) | 投影露光装置及びそれを用いたデバイスの製造方法 | |
| JP4724470B2 (ja) | 露光方法 | |
| JP2009071103A (ja) | 露光システムおよび半導体装置の製造方法 | |
| JP2007250947A (ja) | 露光装置および像面検出方法 | |
| JP4307482B2 (ja) | 位置計測装置、露光装置、およびデバイス製造方法 | |
| JP2009010139A (ja) | 露光装置及びデバイス製造方法 | |
| JP2006339448A (ja) | 受光ユニットを有する露光装置 | |
| JP2002170757A (ja) | 位置計測方法及びその装置、露光方法及びその装置、デバイスの製造方法 | |
| JP2009026976A (ja) | 露光装置およびデバイス製造方法 | |
| JP3376219B2 (ja) | 面位置検出装置および方法 | |
| JP2000146528A (ja) | 位置ずれ検査装置の光学的収差測定方法並びに位置ずれ検査方法 | |
| JPH104055A (ja) | 自動焦点合わせ装置及びそれを用いたデバイスの製造方法 | |
| JP2006242722A (ja) | 位置計測方法、この位置計測方法を実施する位置計測装置、この位置計測方法を使用するデバイス製造方法、及びこの位置計測装置を装備する露光装置 | |
| JP2012190945A (ja) | 露光装置およびデバイス製造方法 | |
| JP2005175383A (ja) | 露光装置、アライメント方法、及び、デバイスの製造方法 | |
| JPH09260269A (ja) | 投影露光方法及びそれを用いたデバイスの製造方法 | |
| CN111443577A (zh) | 用于曝光设备的调整装置、方法及曝光设备 | |
| JP2004281904A (ja) | 位置計測装置、露光装置、及びデバイス製造方法 | |
| JP3890131B2 (ja) | 露光装置およびデバイス製造方法 | |
| JP2012235065A (ja) | 露光装置、および、デバイス製造方法 | |
| JPH104053A (ja) | 面位置検出装置及びそれを用いたデバイスの製造方法 | |
| JPH11195575A (ja) | 位置検出方法および装置、露光装置ならびにデバイス製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060522 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060721 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20061013 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20061107 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3880589 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101117 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101117 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111117 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121117 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131117 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |