JP2004335808A - パターン転写装置、パターン転写方法およびプログラム - Google Patents
パターン転写装置、パターン転写方法およびプログラム Download PDFInfo
- Publication number
- JP2004335808A JP2004335808A JP2003130833A JP2003130833A JP2004335808A JP 2004335808 A JP2004335808 A JP 2004335808A JP 2003130833 A JP2003130833 A JP 2003130833A JP 2003130833 A JP2003130833 A JP 2003130833A JP 2004335808 A JP2004335808 A JP 2004335808A
- Authority
- JP
- Japan
- Prior art keywords
- mold
- transfer
- pattern
- distortion
- magnification
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Abstract
【課題】被転写体の歪みに合わせて転写パターンを補正することができ、被転写体との重ね合わせ精度を向上させることができるパターン転写装置、パターン転写方法およびプログラムを提供する。
【解決手段】被転写体12に対するモールド20の姿勢を制御して、モールド20のパターンを押圧した際に得られる転写パターンを変位させることが可能となっている。このモールド20の姿勢としては、モールド20を任意のオイラー角により回転させて達成することにより、全ての姿勢が得られる。このような姿勢をもってモールド20を被転写体12に対し押圧することにより、モールド20のパターンを被転写体12に投影させたのと実質的に等しい転写パターンが得られる。従って、被転写体12の下地のチップのパターンの歪み、例えば非直交性やX,Y方向の倍率差をもった歪みに追従した転写パターンが得られる。
【選択図】図1
【解決手段】被転写体12に対するモールド20の姿勢を制御して、モールド20のパターンを押圧した際に得られる転写パターンを変位させることが可能となっている。このモールド20の姿勢としては、モールド20を任意のオイラー角により回転させて達成することにより、全ての姿勢が得られる。このような姿勢をもってモールド20を被転写体12に対し押圧することにより、モールド20のパターンを被転写体12に投影させたのと実質的に等しい転写パターンが得られる。従って、被転写体12の下地のチップのパターンの歪み、例えば非直交性やX,Y方向の倍率差をもった歪みに追従した転写パターンが得られる。
【選択図】図1
Description
【0001】
【発明の属する技術分野】
本発明は、例えば半導体製造におけるパターン形成に使用されるパターン転写装置、パターン転写方法およびプログラムに関する。
【0002】
【従来の技術】
デバイスの微細化とともに、現在量産で用いられているフォトリソグラフィの技術的な限界が予想されている。これを打破するための取り組みは3つに分類される。
【0003】
第1に、用いる波長(現在の主流は、KrFレーザの248nm、あるはArFレーザの193nm)は変えずに、近接効果補正(OPC:Optical Proximity Correction) や位相シフトマスクなど、いわゆる超解像技術(RET:Resolution Enhancement Technique) を駆使して、現在のスキームを可能な限り延命させることである。
【0004】
第2に、用いる光の波長を短くすることであり、フッ素レーザ(波長157nm)、さらには極紫外光(波長13nm)を利用した技術が開発されている。
【0005】
第3に、X線、電子線(EB)あるいはイオンビーム等の新しい放射源を用いることである。これには、近接X線リソグラフィ(PXL:Proximity X−ray Lithography)、電子線転写リソグラフィ(EPL:Electron−beam Projection Lithography) 、イオンビーム転写リソグラフィ(IPL:Ion−beam Projection Lithography)、および近接電子線リソグラフィ(PEL:Proximity Electron Lithography) がある。
【0006】
しかし、これらのリソグラフィは技術的難易度が高く、かつ装置およびマスクのコストが極めて高くなると予想されている。唯一PELのみが、その簡易な装置構成により、現在のフォトリソグラフィ装置よりも安価な装置を実現できる可能性がある。
【0007】
高解像かつ安価なリソグラフィとして、ナノインプリントリソグラフィ(NIL:Nano Imprint Lithography) が提案されている(非特許文献1参照)。この方法の原理は、マスクに光や荷電粒子を照射し透過した像を光学系によりウエハ上に結像させるという、従来のリソグラフィの原理とは全く異なる。簡単に述べるなら、デバイスパターンを表面の凹凸として有する”スタンプ ”を作製し、これをレジスト塗布したウエハ上に圧印することでパターンを転写するのである。この方法は、装置がシンプルで極めて安価に製作できる上に、スタンプに相当するモールド(鋳型)を精密に加工すれば、10nm以下の極めて微細なパターンをも転写できることがわかっている。
【0008】
NILでは、基板にレジストを塗布し、基板を加熱することでレジストの塑性を増加させ、モールドを押し付ける。その後、基板を冷却して、モールドを引き離すと、通常のリソグラフィで形成されたのと同様なレジストにパターンが転写される。その他にも、レジストおよびエッチングなしで直接パターンを加工してしまう方法も提案されている(例えば、非特許文献2参照。)
【0009】
【特許文献1】
米国特許第5831272号明細書
【特許文献2】
米国特許第4334156号明細書
【非特許文献1】
S.Y.Chou et al.,Science 272,85(1996)
【非特許文献2】
S.Y.Chou et al.,Nature 417,835(2002)
【非特許文献3】
A. Messiah, Quantum Mechanics, p.1068(1966, North−Holland Publishing, Amsterdam)
【非特許文献4】
L.E.Ocola et al.,J.Vac.Sci.Technol.B19, 2659(2001)
【非特許文献5】
C.J.Martin et al.,J.Vac.Sci.Technol.B20,2891(2002)
【0010】
【発明が解決しようとする課題】
通常のリソグラフィにおいては、前工程で生じたチップの歪みを何らかのアライメントシステムにより検出し、転写光学系によって補正することができる。例えば、PELにおいては、電子光学系の副変更レンズを用いてEBの入射方向を変調させることにより、下地との重ね合わせ精度を向上させることができる(特許文献1,2参照)。
【0011】
一方、ナノインプリントリソグラフィでは、剛性の高いモールドを機械的に圧着することで、パターンを転写するので、たとえ下地の歪みを正確に検出しても、それを補正することができない。これにより、ナノインプリントリソグラフィを他のリソグラフィと併用することが困難となり、ナノインプリントリソグラフィの実用化を阻んでいる。
【0012】
本発明は上記の事情に鑑みてなされたものであり、その目的は、被転写体の歪みに合わせて転写パターンを補正することができ、被転写体との重ね合わせ精度を向上させることができるパターン転写装置、パターン転写方法およびプログラムを提供することにある。
【0013】
【課題を解決するための手段】
上記の目的を達成するため、本発明のパターン転写装置は、モールドに形成されたパターンを被転写体に押圧して、転写するパターン転写装置であって、被転写体に対するモールドの姿勢を制御して、前記モールドのパターンを押圧した際に得られる前記転写パターンを変位させる姿勢制御手段と、前記被転写体に対し前記モールドを前記姿勢をもって押圧する押圧手段とを有する。
【0014】
上記の本発明のパターン転写装置では、姿勢制御手段により、被転写体に対するモールドの姿勢を制御して、モールドのパターンを押圧した際に得られる転写パターンを変位させることが可能となっている。このモールドの姿勢としては、例えばモールドを任意のオイラー角により回転させて達成することにより、全ての姿勢が得られる。
このような姿勢をもってモールドを被転写体に対し押圧することにより、モールドのパターンを被転写体に投影させたのと実質的に等しい転写パターンが得られる。従って、モールドに形成されたパターン自体の寸法は固定でも、被転写体の下地のパターンの歪みに追従した転写パターンが得られる。
【0015】
上記の目的を達成するため、本発明のパターン転写方法は、モールドに形成されたパターンを被転写体に押圧して、前記被転写体あるいは前記モールドを移動させて前記被転写体に押圧する工程を繰り返し行うパターン転写方法であって、前記被転写体の歪みを検出する工程と、検出された前記歪みに合わせた転写パターンとなるように、前記被転写体に対するモールドの姿勢を制御する工程と、前記被転写体に対し前記姿勢をもって前記モールドを押圧する工程とを有する。
【0016】
上記の本発明のパターン転写方法では、検出された歪みに合わせた転写パターンとなるように、被転写体に対するモールドの姿勢を制御して、被転写体に対しモールドを押圧している。このモールドの姿勢としては、例えばモールドを任意のオイラー角により回転させて達成することにより、全ての姿勢が得られる。
このような姿勢をもってモールドを被転写体に対し押圧することにより、モールドのパターンを被転写体に投影させたのと実質的に等しい転写パターンが得られる。従って、モールドに形成されたパターン自体の寸法は固定でも、被転写体の下地のパターンの歪みに追従した転写パターンが得られる。
【0017】
上記の目的を達成するため、本発明のプログラムは、被転写体に対するモールドの転写条件を決定するための処理をコンピュータに実行させるプログラムであって、検出された前記被転写体のアライメントマークの位置に基づいて、前記被転写体の歪みを決定する手順と、前記モールドを任意のオイラー角で回転させた場合に、モールドに形成されたパターンが前記歪みに合わせた転写パターンに変換されるのに必要なオイラー角を算出する手順と、を実行させる。
【0018】
上記の本発明のプログラムでは、被転写体のアライメントマークの位置に基づいて、被転写体の歪みに合わせた転写パターンとなるように、必要なオイラー角が算出される。
上記で得られたオイラー角でモールドを回転させて得られる姿勢をもって、モールドを被転写体に対し押圧することにより、被転写体の下地のパターンの歪みに追従した転写パターンが得られる。
【0019】
【発明の実施の形態】
以下に、本発明の実施の形態について、図面を参照して説明する。
【0020】
発明の背景
現在開発されているリソグラフィのシステムをそのままナノインプリントリソグラフィ(以下、NILと称する)に転用できると有用である。本実施形態では、このうち、LEEPL(Low−energy electron−beam proximity−projection lithography)のシステムを転用する例について説明する。LEEPLは、ギャップ30μm以下の近接露光であり、そこで用いられるギャップ制御技術やマスクレベリング技術等はNILに応用できる。LEEPL装置から電子光学系を取り去り、ウエハステージにインプリント用加圧機構を取り付ける等の小改造で、大きな技術的障壁なくスムーズにPELからナノインプリントに移行することができる。以下に記述するように、マスク構造を工夫すれば、現在LEEPL装置で用いられている散乱光アライメント(SLA:Scattering Light Alignment) も利用できる。
【0021】
また、後述するSOI基板を用いたモールドの製造には、LEEPL用ステンシルマスク製造インフラがそのまま利用できる。例えば、PELマスクもNILモールドも等倍マスクなので、マスク製造に必要なEB描画技術などを有効に利用できる。
【0022】
本実施形態では、上述したように今までの等倍近接露光の技術を応用して、高精度な重ね合わせ精度をもつNILの実現を図る例について説明するが、以下に示す装置構成および転写プロセスと同様の機能を果たすものであれば、特に限定されるものではない。
【0023】
パターン転写装置
図1は、本実施形態に係るパターン転写装置の概略構成図である。図1に示すパターン転写装置は、いわゆるNILに使用されるものである。
図1に示すパターン転写装置は、大別して、基板ステージ1と、モールドステージ2と、アライメント光学系3と、加圧機構(押圧手段)4と、倍率調整手段(寸法調整手段)5とを有する。さらに、本実施形態では、基板ステージ1あるいはモールドステージ2のいずれかに、後述する姿勢制御手段が付加されている。
【0024】
基板ステージ1は、例えばレジスト等の被転写膜12を有する基板10を保持し、その位置を制御すべく平面方向に駆動可能となっている。基板ステージ1は、加熱手段としてのヒータ1aを備え、例えば基板10を加熱して、熱可塑性樹脂のレジストからなる被転写膜12を軟化させる。基板10は、例えば半導体ウエハであり、基板10には基板側アライメントマーク11が形成されている。
【0025】
モールドステージ2は、例えば、後述する姿勢制御手段を備えており、モールド20を保持し基板10に対する姿勢を制御する。モールド20は、被転写膜12に転写すべき凹凸構造のモールドパターンと、モールド側アライメントマーク21を備え、例えば、板状の金属、ガラス、半導体層等が用いられる。モールド側アライメントマーク21は、アライメント光学系3が存在する側のモールド20の表面に形成される。
【0026】
アライメント光学系3は、基板10の歪み(より詳細には各チップの歪み)、および基板10とモールド20の位置を検出するために、および基板側アライメントマーク11およびモールド側アライメントマーク21からの散乱光を観測する。
【0027】
加圧機構4は、基板10に対しモールド20を圧着させて、モールドのパターンを被転写膜12に転写するための設けられる。加圧機構4は、例えば、加圧板41と、加圧板41を押圧する油圧式ポンプ42と、油圧ポンプ42による圧力印加を解除する圧力弁43とを有する。油圧式ポンプ42は、加圧面内に均一な圧力を印加する。圧力弁43を開けることにより、基板10とモールド20との圧力印加は解除されて、基板10とモールド20は引き離される。本実施形態では、基板ステージ1を押圧するように加圧機構4が設けられている。
【0028】
倍率調整手段5は、モールド20の寸法を調整するために、モールド20のパターンの全体を所定の倍率で拡大あるいは縮小させる。倍率調整手段5は、光源51およびレンズ52を有し、モールド20の温度を制御して熱膨張または熱収縮させることにより倍率を調整する。なお、加熱光を発生する光源は、キセノンランプの他、ハロゲンランプ、YAGレーザ、CO2 レーザ等を使用することができる。レンズ52は、光源で発生した加熱光を拡大し、モールド21に均一に照射するため設けられており、例えばコリメータレンズを採用することができる。
【0029】
あるいは、倍率調整手段5は、横方向からの荷重によりモールド20のパターンの全体を所定の倍率で拡大あるいは縮小させるものとして、モールド20の水平方向の両側に位置する荷重印加手段53を有する。なお、倍率調整手段5として、加熱による寸法調整あるいは荷重による寸法調整のいずれか一つを採用すればよい。
【0030】
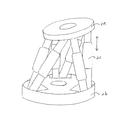
上記のパターン転写装置において、本実施形態では、モールドステージ20が任意のオイラー角で回転可能な自由度をもっている点に特徴を有する。図2は、モールドステージ20の一例を示す構成図である。
【0031】
図2に示すように、モールドステージ20は、可動ステージ2aと、固定ステージ2bと、可動ステージ2aと固定ステージ2bとを連結する6本の脚部2cを有する。図2に示すモールドステージ20は、図1とは上下を反転して図解しており、図2において可動ステージ2a上にモールド20が保持される。
【0032】
各脚部2cは、矢印で示す長手方向に伸縮可能に構成されており、かつ、固定ステージ2bに支持された支点を軸として、その方向を変化させることができるように構成されている。各脚部2cの方向が変化した場合においても、各脚部2cは他方の可動ステージ2aに対し回動可能に連結された状態にある。このように構成されていることにより、可動ステージ2aを支持する6本の脚部2cの長さと方向を変化させることにより、可動ステージ2aの自由な回転を可能にしている。
【0033】
歪み補正のアルゴリズム
次に、可動ステージ2aのオイラー回転による,基板10の歪みを補正するアルゴリズムについて説明する。ここでは、基板10として複数のチップが生産されるウエハの場合を例に説明する。
【0034】
NILによりパターンを重ね合わせる基板10の下地チップの線形歪みは、次の4つの量、X方向の倍率mX 、Y方向の倍率mY 、回転角θ、直行度ψで表される。また、倍率の1からのずれをμX =mX −1、μY =mY −1として定義する。
【0035】
モールドステージ上のXYZ座標を考えると、図3に示すように、モールドの任意の回転は、オイラー角(α、β、γ)で表すことができる(例えば、非特許文献3参照)。ここで、α、β、γは、それぞれY、Z、およびX軸まわりの回転角である。
【0036】
上記したように、図2で示したようなステージにより、モールドを任意のオイラー角で回転させることが可能である。モールドをXとY方向別々に変形させることは困難なので、モールド全体を倍率mで拡大あるいは縮小し、その後にオイラー回転を行う。回転角は、モールド上のパターンをウエハ上へ投影したものとウエハ上のチップとの重ね合わせ誤差が最小になるように決定する。
一般に、オイラー回転による座標の変換は、下記式(1)に示す行列で表される。
【0037】
【数1】
 【0038】
【0038】
ここで、回転角は十分小さいので、角度に関する2次の項のみをとると、上記式(1)の行列は、下記式(2)のように簡単になる。
【0039】
【数2】
【0040】
モールド面のウエハ面への投影は、下記式(3)のようになる。
【0041】
【数3】
【0042】
一方、チップ歪みは下記式(4)に示す行列で表される(例えば、非特許文献4参照)。
【0043】
【数4】
【0044】
上記式(3)と(4)とを比較すると、下記式(5)および(6)に示す関係が成立する。
【0045】
【数5】
【0046】
【数6】
【0047】
上記式(5)によりβは決まるが、αとγは一意的には決まらない。そこで、モールド全体の倍率も考慮すると、下記式(7)および(8)に示す関係が成立する。
【0048】
【数7】
【0049】
【数8】
【0050】
以上の式(5)〜式(8)に示すように、4変数に対して4つの式が連立しているので、これを解くことにより、倍率とオイラー角を一意的に決定することができる。
【0051】
歪み補正方法
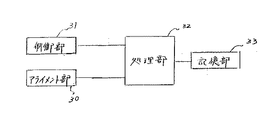
図4は、本実施形態に係るプログラムが読み込まれることにより、倍率とオイラー角を制御する歪み補正方法を実現するパターン転写装置の要部ブロック図である。
【0052】
すなわち、パターン転写装置は、アライメントマークを検出するアライメント部30およびモールドステージの動作を制御する制御部31に接続された処理部32と、本実施形態に係るプログラムが格納された記憶部33とを有する。
【0053】
アライメント部30は、図1のアライメント光学系3に相当し、基板側アライメントマーク11やモールド側アライメントマーク21を検出する。
【0054】
制御部31は、処理部32からオイラー回転率についての信号を入力し、この信号に基づいて、可動ステージをオイラー回転させるべくモールドステージの脚部2cを制御する。また、処理部32からモールドの倍率についての信号を入力し、この倍率となるように倍率調整手段5によるモールド20への加熱あるいは荷重を制御する。
【0055】
処理部32および記憶部33は、主としてパーソナルコンピュータやワークステーション等の計算機から構成される。記憶部33としては、ハードディスクやフレキシブルディスク等の磁気記憶装置、CD−ROM等の読み出し専用メモリ、光磁気ディスクなど、各種の記録媒体が適用される。
【0056】
上記式(5)〜(8)の演算ステップが手順として記述されたプログラムが記憶部33に格納されており、実行する際には処理部32の不図示のメインメモリに読み込まれて不図示のCPUで実行される。
【0057】
図5に、処理部による処理のフローチャートを示す。
処理部32は、アライメント部30からのアライメントデータに基づいて、演算によりチップ歪みを算出し(ステップST1)、このチップ歪および上記の関係式(5)〜(8)に基づいてリアルタイムに転写単位領域であるチップ毎に必要なモールドステージを回転させるためのオイラー角とモールドの倍率を決定し、制御部31に出力する(ステップST2)。
以上のようにして決定されたオイラー角およびモールドの倍率に基づいて、制御部31によりモールドステージの姿勢と、モールドの寸法が調整される。
【0058】
例えば、図6(a)に示すように、転写単位領域としてのチップが存在する場合に、理想的な格子EからX方向およびY方向に均一な倍率で広がっているようなチップCh1の歪みに対しては、当該歪みに合わせるようにしてモールドの倍率を調整することにより、重ね合わせ精度が向上する。
【0059】
但し、モールドの倍率の調整は、直交性を満たしかつ等方性の倍率をもった歪みにしか対応できないため、図6(b)に示すように非直交性となったチップCh2の歪みや、図6(c)に示すようにX,Y方向で倍率差がある場合のチップCh3の歪みに対応することはできない。
【0060】
従って、図6(b)に示す非直交性のチップCh2の歪みに対しては、下地のチップの歪みに合わせた転写パターンとなるように、モールドステージによりモールドの姿勢が制御される。すなわち、モールドパターンは、理想的な格子Eに対応したものであるが、モールドの姿勢を変えて転写することにより、転写されたパターンは非直交性となる。
【0061】
また、図6(c)に示すX,Y方向の倍率差があるチップCh3の歪みに対しても、モールドステージによりモールドの姿勢を制御することにより補正する。すなわち、モールドの姿勢を変えて転写することにより、転写されたパターンは、X方向とY方向とで独立の倍率となる。
【0062】
さらに、図6(a)〜図6(c)に示す歪みを組み合わせたようなチップ歪みに対しても、上記したようにモールドの倍率および姿勢の双方を制御することにより、転写パターンを下地パターンに追従させることができ、その結果良好な重ね合わせ精度を実現することができる。
【0063】
アライメント方法
上記のパターン転写装置によるアライメントマークの検出方法について説明する。本例では、上記した被転写体である基板10の基板側アライメントマーク11とモールド側アライメントマーク21の相対位置を、モールド20を通して同時に検出するTTR(Through The Reticle)方式として、散乱光アライメント(SLA:Scattering Light Alignment) を用いる方法を述べる。なお、下地チップの歪みが正確に測定可能なアライメント方式であれば、これ以外の方法を用いることもできる。
【0064】
図7は、SLAアライメント方式を説明するための図である。なお、図7では、モールド20は凹凸パターンは省略しており、アライメントマークに着目した部分のみ示している。また、基板10側も被転写膜12は省略して示している。
【0065】
図7に示すように、モールド20には、モールド側アライメントマーク21とアライメントマークを検出するためのマーク検出用窓22が形成されている。モールド側アライメントマーク21は、モールド20の表面に形成された溝であっても貫通孔であってもよい。
【0066】
平行な光束のアライメント光L1,L2は、モールド面(図7でX−Y平面に平行な面)に対して斜方から照射される。すなわち、アライメント光L1,L2の光軸は、図7のY−Z平面に平行である。
【0067】
マーク検出用窓22を通って基板側アライメントマーク11で反射、散乱され再度マーク検出用窓22を通ってきたアライメント光L1を検出する。また、モールド側アライメントマーク21で反射、散乱されたアライメント光L2を検出する。
【0068】
例えば、図7(b)に示すように、複数の基板側アライメントマーク11およびモールド側アライメントマーク21が形成されており、検出された基板側アライメントマーク11およびモールド側アライメントマーク21の相対位置とアライメント光L1,L2の傾き角θとの相対関係から、モールド20に対するチップ歪みの検出のためのアライメントデータが作製される。
【0069】
上記のSLAアライメント方式は、もともとPXL(Pdoximity X−ray Lithography)のために開発された方法である。PXLの場合、X線の入射方向をふさがないために、アライメント光学系は、斜めに配置されている。一方、NILと称されるパターン転写装置では、このような制約がないので、アライメント光学系を垂直に配置してもよい。これにより、マーク検出用窓22の面積を小さくすることができる。
【0070】
以上のように、アライメント方法としては、電子線やX線あるいはイオンビームを用いたリソグラフィに使用されているアライメント光学系を同様に採用することができ、アライメントシステムに制限はない。
【0071】
転写プロセス
次に、上記のパターン転写装置による転写プロセスの一例について、図8に示すフローチャートおよび図9に示す工程断面図を参照して説明する。
【0072】
まず、例えば被転写膜12としてレジストを塗布した基板10を基板ステージ1により保持し(ステップST11)、凹凸構造のモールドパターンを有するモールド20をモールドステージ2により保持する(ステップST12)。これにより、図9(a)に示すように、基板10とモールド20とを近接させる。
【0073】
次に、基板ステージ1のヒータ1aにより基板10を加熱することにより、レジストの塑性を増加させる(ステップST13)。また、アライメント光学系3により基板側アライメントマーク11およびモールド側アライメントマーク21を検出して、チップとモールド20の相対位置や、基板10の各チップの倍率や非直交性やX,Y方向の倍率差といった歪みを検出する(ステップST14)。
【0074】
次に、アライメントマーク検出工程で検出されたモールド20とチップとの相対位置に基づいて、例えば基板ステージ1の制御により、モールド12とチップとの相対位置を最適に合わせる(ステップST15)。
【0075】
次に、アライメントマーク検出工程で検出された転写単位領域であるチップの歪みに応じてモールドステージ2によりモールド20の姿勢を制御し、倍率調整手段5によりモールド20の倍率を制御する(ステップST16)。
【0076】
次に、図9(b)に示すように、基板10とモールド20とを圧着させる(ステップST17)。基板10とモールド20との圧着は、油圧式ポンプ42によって基板ステージ1の下方より押圧される。この圧着によって、軟化している熱可塑性のレジストからなる被転写膜12は変形し、モールドパターンが転写される。
【0077】
次に、図9(c)に示すように、基板10を冷却した後、モールド20を引き離すと、レジストからなる被転写膜12に凹凸構造のパターンが形成される(ステップST18)。本実施形態では、ヒーター1aによる加熱を止めて基板10を冷却し、油圧ポンプ42の圧力弁43を開けて圧力を解除し、モールド20を引き離す。なお、モールド圧着時に、モールドの背後から紫外光を照射させてレジストを硬化させることもできる。この場合、モールドは石英等の光を透過させる材料で製造する必要がある。
【0078】
その後、図9(d)に示すように、エッチングにより凹部に残留しているレジストからなる被転写膜12が除去され、通常のリソグラフィで形成されたものと同様なレジストパターンが形成される。
【0079】
以上のステップST13〜ST18の処理を繰り返し各チップに行うことにより、例えばウエハからなる基板10の全面への転写プロセスが終了する。基板2の図示しない被加工膜は、上記のレジストをエッチングマスクとしてエッチングすることにより、加工される。
【0080】
上記の転写プロセスにおいて、モールドをレジストに印加するための距離が大きくなると、モールド20の変形やレジストのパターンの歪みが大きくなることから、薄膜レジストによるプロセスを用いることが好ましい。例えば、被転写膜21として、ArFリソグラフィの多層レジストプロセスの中間層として用いられるSOG(Spin−On−Glass)を70nm塗布した上に、PMMA(Poly−Methlmethacrylate) を70nm塗布する。この場合には、ステップST13のレジスト軟化工程では、基板を175℃まで加熱し、ステップST17の圧着工程では、4.4MPaの圧力でモールドをレジストに押し付けることで、パターンが転写される。
【0081】
また、ステップST17におけるモールドの圧着の圧力は、モールドの変形が許容範囲内になるように決定する必要がある。この最適値は、インプリント・プロセスの有限要素法(FEM)シミュレーションにより決定することができる(例えば、非特許文献5参照)。モールドの圧着時間は、形成されたレジストパターン断面の走査電子顕微鏡(SEM)観察等によってすることができる。
【0082】
なお、上記では代表的な方法のみを説明したが、NILと称される転写プロセスには様々なバリエーションがあり、いずれのバリエーションに対しても本実施形態に係るパターン転写装置およびパターン転写方法は適用可能である。
【0083】
例えば、レジストなしで直接モールドをシリコン基板に接触させ、モールド背後からレーザーを照射させることで、接触部のシリコンを溶融させ、ステップST19に示すエッチング工程なしで直接パターン加工してしまう方法が提案されており、これに適用することもできる。従って、本実施形態は、図8および図9に示すフローに限定されない(例えば、非特許文献2参照。)。
【0084】
モールド製造方法
次に、モールド製造方法について説明する。例えば現在マスク製造のためにも使用されているSOI(Silicon On Insulator) 基板を材料とする例について説明する。シリコン基板は、紫外(UV)光を透過しないので、上記したUV照射によりレジストを硬化させる方法には用いることはできない。しかし、シリコンをエッチングして微細なパターンを形成する技術は、デバイス製造、あるいはEPL,PEL用ステンシルマスク製造において非常に研究・開発されているので、微細なパターンを有するモールドを製造するためには、石英基板よりもシリコン基板の方が有利であると考えられるからである。但し、本発明では特にモールドを作製するための基板に限定はない。
【0085】
例えば、図10(a)に示すように、貼り合わせ法により製造された直径200mmのSOI基板を用いる場合、SOI層203の厚さが600nm、埋め込み酸化物層202の厚さが1000nm、シリコン基板201の厚さが725μmのSOI基板を用いることができる。
【0086】
まず、図10(b)に示すように、モールド側アライメントマーク21を加工する。これは、SOI基板の裏面、すなわち、シリコン基板201にレジストを塗布し、リソグラフィにより、図7(b)で示すようなドット状のパターンを描画し、レジストをマスクとしてシリコン基板201をエッチングすることにより得られる。各ドットのサイズは、0.3μm×1.5μmで、それが縦100μmの範囲に6列並んでいる。
【0087】
次に、図10(c)に示すように、SLAを用いるためのマーク検出用窓22を形成する。但し、透明な石英基板を用いる場合は、この窓は不要である。SOI基板の裏面に厚さ10μmのレジストを塗布し、窓に相当する領域の2か所を、例えば120μm×50μmの寸法で、コンタクトアライナー等で露光および現像する。これを、ICPエッチャーで埋め込み酸化物層202まで貫通させる。シリコンとその酸化物とのエッチング選択比は1000以上あるので、エッチングは埋め込み酸化物層202で止まる。
【0088】
次に、図11(d)に示すように、例えばSOI基板をHF溶液に浸漬させることにより、マーク検出用窓22の領域に露出した埋め込み酸化物層202を除去する。これにより、マーク検出用窓22の部分は、例えば厚さが600nmのSOI層のみが残る。
【0089】
SOI層の表面にレジストを塗布し、EB描画機により被転写膜に形成すべきデバイスパターンを描画し、かつ、マーク検出用窓に相当する薄膜となった領域も描画する。レジストは、例えば、化学増幅型のポジレジストを200nmの厚さで塗布する。現像後、レジストをマスクとしてエッチングすると、デバイスパターンが加工されると同時に、マーク検出用窓に相当する部分のSOI層203も除去されて、マーク検出用窓が開口する。薄膜となったSOI層の部分が貫通すると、イオンやラジカルが侵入するので、治具でエッチャーのステージを保護しておくことが好ましい。
以上のようにして、図11(e)に示すSOI基板より作製されたモールドが完成する。
【0090】
以上説明したように、本実施形態では、モールド20を任意のオイラー角により回転させて基板10に対するモールド20の姿勢を制御することにより、基板10に配置された各チップの非直交性の歪みや、X,Y方向で倍率差があるような歪みに追従した転写パターンを形成することができ、下地のパターンとの重ね合わせ精度を向上させることができる。
【0091】
また、モールド20に対し加熱あるいは横方向からの均一な荷重をかけることにより、モールド20の寸法を調整することにより、転写パターンの倍率を調整することもでき、下地のパターンとの重ね合わせ精度を向上させることができる。
【0092】
このように重ね合わせ精度が向上することにより、他のリソグラフィとの併用が可能となり、パターン転写装置の実用化が促進される。パターン転写装置の実現により、デバイスの製造コストの低減を図ることができる。また、上記したパターン転写装置は、PELの装置技術を応用して達成することができる。
【0093】
さらに、PELのステンシルマスク製造技術を用いてモールドを製造することにより、マスクとモールドの価格を下げることができる。
【0094】
本発明は、上記の実施形態の説明に限定されない。例えば、本実施形態では、本発明の姿勢制御手段がモールドステージに備えられている例について説明したが、基板ステージに備えられていてもよい。
【0095】
また、本実施形態では、SLAを用いたダイバイダイアライメント方式によりチップ歪みをインラインで補正して転写する例について説明したが、これに限定されるものではない。
【0096】
例えば、同じロットの基板(ウエハ)から一枚抜き出して、ウエハの各チップにモールドのアライメントマークを転写して、転写マークと各チップのアライメントマークとを検出することで、予め基板のチップ毎の歪みを決定しておいてもよい。この場合には、同一ロットの基板のチップ歪みの分布は全て等しいと推測して、他の基板の転写処理に際しチップ毎にモールドの姿勢を制御してパターン転写を行う。
【0097】
あるいは、グローバルアライメント方式を採用することもできる。この場合には、基板(ウエハ)のアライメントマークをオフライン観測し、各チップの歪みを予め検出しておく。そして、同一ロットの基板のチップ歪みの分布は全て等しいと推測して、他の基板の転写処理に際しチップ毎にモールドの姿勢を制御してパターン転写を行う。
その他、本発明の要旨を逸脱しない範囲で、種々の変更が可能である。
【0098】
【発明の効果】
本発明によれば、被転写体の歪みに合わせて転写パターンを補正することができ、被転写体との重ね合わせ精度を向上させることができる。
【図面の簡単な説明】
【図1】本実施形態に係るパターン転写装置の一例を示す概略構成図である。
【図2】モールドステージの一例を示す構成図である。
【図3】モールドステージによる歪み補正のアルゴリズムを説明するための図である。
【図4】本実施形態に係るパターン転写装置のうち、倍率とオイラー角を制御する要部構成を示すブロック図である。
【図5】本実施形態に係るパターン転写方法による、歪み補正のためのフローチャートである。
【図6】本実施形態に係るパターン転写装置による歪み補正を説明するための図である。
【図7】本実施形態に係るパターン転写装置によるアライメント方法を説明するための図である。
【図8】本実施形態に係るパターン転写方法のフローチャートである。
【図9】本実施形態に係るパターン転写方法を説明するための工程断面図である。
【図10】本実施形態に係るパターン転写方法に使用されるモールドの製造における工程断面図である。
【図11】本実施形態に係るパターン転写方法に使用されるモールドの製造における工程断面図である。
【符号の説明】
1…基板ステージ、1a…ヒータ、2…モールドステージ、2a…可動ステージ、2b…固定ステージ、2c…脚部、3…アライメント光学系、4…加圧機構、5…倍率調整手段、10…基板、11…基板側アライメントマーク、12…被転写膜、20…モールド、21…モールド側アライメントマーク、22…マーク検出用窓、30…アライメント部、31…制御部、32…処理部、33…記憶部、41…加圧板、42…油圧ポンプ、43…圧力弁、51…光源、52…レンズ、53…荷重印加手段、L1,L2…アライメント光、201…シリコン基板、202…埋め込み酸化物層、203…SOI層。
【発明の属する技術分野】
本発明は、例えば半導体製造におけるパターン形成に使用されるパターン転写装置、パターン転写方法およびプログラムに関する。
【0002】
【従来の技術】
デバイスの微細化とともに、現在量産で用いられているフォトリソグラフィの技術的な限界が予想されている。これを打破するための取り組みは3つに分類される。
【0003】
第1に、用いる波長(現在の主流は、KrFレーザの248nm、あるはArFレーザの193nm)は変えずに、近接効果補正(OPC:Optical Proximity Correction) や位相シフトマスクなど、いわゆる超解像技術(RET:Resolution Enhancement Technique) を駆使して、現在のスキームを可能な限り延命させることである。
【0004】
第2に、用いる光の波長を短くすることであり、フッ素レーザ(波長157nm)、さらには極紫外光(波長13nm)を利用した技術が開発されている。
【0005】
第3に、X線、電子線(EB)あるいはイオンビーム等の新しい放射源を用いることである。これには、近接X線リソグラフィ(PXL:Proximity X−ray Lithography)、電子線転写リソグラフィ(EPL:Electron−beam Projection Lithography) 、イオンビーム転写リソグラフィ(IPL:Ion−beam Projection Lithography)、および近接電子線リソグラフィ(PEL:Proximity Electron Lithography) がある。
【0006】
しかし、これらのリソグラフィは技術的難易度が高く、かつ装置およびマスクのコストが極めて高くなると予想されている。唯一PELのみが、その簡易な装置構成により、現在のフォトリソグラフィ装置よりも安価な装置を実現できる可能性がある。
【0007】
高解像かつ安価なリソグラフィとして、ナノインプリントリソグラフィ(NIL:Nano Imprint Lithography) が提案されている(非特許文献1参照)。この方法の原理は、マスクに光や荷電粒子を照射し透過した像を光学系によりウエハ上に結像させるという、従来のリソグラフィの原理とは全く異なる。簡単に述べるなら、デバイスパターンを表面の凹凸として有する”スタンプ ”を作製し、これをレジスト塗布したウエハ上に圧印することでパターンを転写するのである。この方法は、装置がシンプルで極めて安価に製作できる上に、スタンプに相当するモールド(鋳型)を精密に加工すれば、10nm以下の極めて微細なパターンをも転写できることがわかっている。
【0008】
NILでは、基板にレジストを塗布し、基板を加熱することでレジストの塑性を増加させ、モールドを押し付ける。その後、基板を冷却して、モールドを引き離すと、通常のリソグラフィで形成されたのと同様なレジストにパターンが転写される。その他にも、レジストおよびエッチングなしで直接パターンを加工してしまう方法も提案されている(例えば、非特許文献2参照。)
【0009】
【特許文献1】
米国特許第5831272号明細書
【特許文献2】
米国特許第4334156号明細書
【非特許文献1】
S.Y.Chou et al.,Science 272,85(1996)
【非特許文献2】
S.Y.Chou et al.,Nature 417,835(2002)
【非特許文献3】
A. Messiah, Quantum Mechanics, p.1068(1966, North−Holland Publishing, Amsterdam)
【非特許文献4】
L.E.Ocola et al.,J.Vac.Sci.Technol.B19, 2659(2001)
【非特許文献5】
C.J.Martin et al.,J.Vac.Sci.Technol.B20,2891(2002)
【0010】
【発明が解決しようとする課題】
通常のリソグラフィにおいては、前工程で生じたチップの歪みを何らかのアライメントシステムにより検出し、転写光学系によって補正することができる。例えば、PELにおいては、電子光学系の副変更レンズを用いてEBの入射方向を変調させることにより、下地との重ね合わせ精度を向上させることができる(特許文献1,2参照)。
【0011】
一方、ナノインプリントリソグラフィでは、剛性の高いモールドを機械的に圧着することで、パターンを転写するので、たとえ下地の歪みを正確に検出しても、それを補正することができない。これにより、ナノインプリントリソグラフィを他のリソグラフィと併用することが困難となり、ナノインプリントリソグラフィの実用化を阻んでいる。
【0012】
本発明は上記の事情に鑑みてなされたものであり、その目的は、被転写体の歪みに合わせて転写パターンを補正することができ、被転写体との重ね合わせ精度を向上させることができるパターン転写装置、パターン転写方法およびプログラムを提供することにある。
【0013】
【課題を解決するための手段】
上記の目的を達成するため、本発明のパターン転写装置は、モールドに形成されたパターンを被転写体に押圧して、転写するパターン転写装置であって、被転写体に対するモールドの姿勢を制御して、前記モールドのパターンを押圧した際に得られる前記転写パターンを変位させる姿勢制御手段と、前記被転写体に対し前記モールドを前記姿勢をもって押圧する押圧手段とを有する。
【0014】
上記の本発明のパターン転写装置では、姿勢制御手段により、被転写体に対するモールドの姿勢を制御して、モールドのパターンを押圧した際に得られる転写パターンを変位させることが可能となっている。このモールドの姿勢としては、例えばモールドを任意のオイラー角により回転させて達成することにより、全ての姿勢が得られる。
このような姿勢をもってモールドを被転写体に対し押圧することにより、モールドのパターンを被転写体に投影させたのと実質的に等しい転写パターンが得られる。従って、モールドに形成されたパターン自体の寸法は固定でも、被転写体の下地のパターンの歪みに追従した転写パターンが得られる。
【0015】
上記の目的を達成するため、本発明のパターン転写方法は、モールドに形成されたパターンを被転写体に押圧して、前記被転写体あるいは前記モールドを移動させて前記被転写体に押圧する工程を繰り返し行うパターン転写方法であって、前記被転写体の歪みを検出する工程と、検出された前記歪みに合わせた転写パターンとなるように、前記被転写体に対するモールドの姿勢を制御する工程と、前記被転写体に対し前記姿勢をもって前記モールドを押圧する工程とを有する。
【0016】
上記の本発明のパターン転写方法では、検出された歪みに合わせた転写パターンとなるように、被転写体に対するモールドの姿勢を制御して、被転写体に対しモールドを押圧している。このモールドの姿勢としては、例えばモールドを任意のオイラー角により回転させて達成することにより、全ての姿勢が得られる。
このような姿勢をもってモールドを被転写体に対し押圧することにより、モールドのパターンを被転写体に投影させたのと実質的に等しい転写パターンが得られる。従って、モールドに形成されたパターン自体の寸法は固定でも、被転写体の下地のパターンの歪みに追従した転写パターンが得られる。
【0017】
上記の目的を達成するため、本発明のプログラムは、被転写体に対するモールドの転写条件を決定するための処理をコンピュータに実行させるプログラムであって、検出された前記被転写体のアライメントマークの位置に基づいて、前記被転写体の歪みを決定する手順と、前記モールドを任意のオイラー角で回転させた場合に、モールドに形成されたパターンが前記歪みに合わせた転写パターンに変換されるのに必要なオイラー角を算出する手順と、を実行させる。
【0018】
上記の本発明のプログラムでは、被転写体のアライメントマークの位置に基づいて、被転写体の歪みに合わせた転写パターンとなるように、必要なオイラー角が算出される。
上記で得られたオイラー角でモールドを回転させて得られる姿勢をもって、モールドを被転写体に対し押圧することにより、被転写体の下地のパターンの歪みに追従した転写パターンが得られる。
【0019】
【発明の実施の形態】
以下に、本発明の実施の形態について、図面を参照して説明する。
【0020】
発明の背景
現在開発されているリソグラフィのシステムをそのままナノインプリントリソグラフィ(以下、NILと称する)に転用できると有用である。本実施形態では、このうち、LEEPL(Low−energy electron−beam proximity−projection lithography)のシステムを転用する例について説明する。LEEPLは、ギャップ30μm以下の近接露光であり、そこで用いられるギャップ制御技術やマスクレベリング技術等はNILに応用できる。LEEPL装置から電子光学系を取り去り、ウエハステージにインプリント用加圧機構を取り付ける等の小改造で、大きな技術的障壁なくスムーズにPELからナノインプリントに移行することができる。以下に記述するように、マスク構造を工夫すれば、現在LEEPL装置で用いられている散乱光アライメント(SLA:Scattering Light Alignment) も利用できる。
【0021】
また、後述するSOI基板を用いたモールドの製造には、LEEPL用ステンシルマスク製造インフラがそのまま利用できる。例えば、PELマスクもNILモールドも等倍マスクなので、マスク製造に必要なEB描画技術などを有効に利用できる。
【0022】
本実施形態では、上述したように今までの等倍近接露光の技術を応用して、高精度な重ね合わせ精度をもつNILの実現を図る例について説明するが、以下に示す装置構成および転写プロセスと同様の機能を果たすものであれば、特に限定されるものではない。
【0023】
パターン転写装置
図1は、本実施形態に係るパターン転写装置の概略構成図である。図1に示すパターン転写装置は、いわゆるNILに使用されるものである。
図1に示すパターン転写装置は、大別して、基板ステージ1と、モールドステージ2と、アライメント光学系3と、加圧機構(押圧手段)4と、倍率調整手段(寸法調整手段)5とを有する。さらに、本実施形態では、基板ステージ1あるいはモールドステージ2のいずれかに、後述する姿勢制御手段が付加されている。
【0024】
基板ステージ1は、例えばレジスト等の被転写膜12を有する基板10を保持し、その位置を制御すべく平面方向に駆動可能となっている。基板ステージ1は、加熱手段としてのヒータ1aを備え、例えば基板10を加熱して、熱可塑性樹脂のレジストからなる被転写膜12を軟化させる。基板10は、例えば半導体ウエハであり、基板10には基板側アライメントマーク11が形成されている。
【0025】
モールドステージ2は、例えば、後述する姿勢制御手段を備えており、モールド20を保持し基板10に対する姿勢を制御する。モールド20は、被転写膜12に転写すべき凹凸構造のモールドパターンと、モールド側アライメントマーク21を備え、例えば、板状の金属、ガラス、半導体層等が用いられる。モールド側アライメントマーク21は、アライメント光学系3が存在する側のモールド20の表面に形成される。
【0026】
アライメント光学系3は、基板10の歪み(より詳細には各チップの歪み)、および基板10とモールド20の位置を検出するために、および基板側アライメントマーク11およびモールド側アライメントマーク21からの散乱光を観測する。
【0027】
加圧機構4は、基板10に対しモールド20を圧着させて、モールドのパターンを被転写膜12に転写するための設けられる。加圧機構4は、例えば、加圧板41と、加圧板41を押圧する油圧式ポンプ42と、油圧ポンプ42による圧力印加を解除する圧力弁43とを有する。油圧式ポンプ42は、加圧面内に均一な圧力を印加する。圧力弁43を開けることにより、基板10とモールド20との圧力印加は解除されて、基板10とモールド20は引き離される。本実施形態では、基板ステージ1を押圧するように加圧機構4が設けられている。
【0028】
倍率調整手段5は、モールド20の寸法を調整するために、モールド20のパターンの全体を所定の倍率で拡大あるいは縮小させる。倍率調整手段5は、光源51およびレンズ52を有し、モールド20の温度を制御して熱膨張または熱収縮させることにより倍率を調整する。なお、加熱光を発生する光源は、キセノンランプの他、ハロゲンランプ、YAGレーザ、CO2 レーザ等を使用することができる。レンズ52は、光源で発生した加熱光を拡大し、モールド21に均一に照射するため設けられており、例えばコリメータレンズを採用することができる。
【0029】
あるいは、倍率調整手段5は、横方向からの荷重によりモールド20のパターンの全体を所定の倍率で拡大あるいは縮小させるものとして、モールド20の水平方向の両側に位置する荷重印加手段53を有する。なお、倍率調整手段5として、加熱による寸法調整あるいは荷重による寸法調整のいずれか一つを採用すればよい。
【0030】
上記のパターン転写装置において、本実施形態では、モールドステージ20が任意のオイラー角で回転可能な自由度をもっている点に特徴を有する。図2は、モールドステージ20の一例を示す構成図である。
【0031】
図2に示すように、モールドステージ20は、可動ステージ2aと、固定ステージ2bと、可動ステージ2aと固定ステージ2bとを連結する6本の脚部2cを有する。図2に示すモールドステージ20は、図1とは上下を反転して図解しており、図2において可動ステージ2a上にモールド20が保持される。
【0032】
各脚部2cは、矢印で示す長手方向に伸縮可能に構成されており、かつ、固定ステージ2bに支持された支点を軸として、その方向を変化させることができるように構成されている。各脚部2cの方向が変化した場合においても、各脚部2cは他方の可動ステージ2aに対し回動可能に連結された状態にある。このように構成されていることにより、可動ステージ2aを支持する6本の脚部2cの長さと方向を変化させることにより、可動ステージ2aの自由な回転を可能にしている。
【0033】
歪み補正のアルゴリズム
次に、可動ステージ2aのオイラー回転による,基板10の歪みを補正するアルゴリズムについて説明する。ここでは、基板10として複数のチップが生産されるウエハの場合を例に説明する。
【0034】
NILによりパターンを重ね合わせる基板10の下地チップの線形歪みは、次の4つの量、X方向の倍率mX 、Y方向の倍率mY 、回転角θ、直行度ψで表される。また、倍率の1からのずれをμX =mX −1、μY =mY −1として定義する。
【0035】
モールドステージ上のXYZ座標を考えると、図3に示すように、モールドの任意の回転は、オイラー角(α、β、γ)で表すことができる(例えば、非特許文献3参照)。ここで、α、β、γは、それぞれY、Z、およびX軸まわりの回転角である。
【0036】
上記したように、図2で示したようなステージにより、モールドを任意のオイラー角で回転させることが可能である。モールドをXとY方向別々に変形させることは困難なので、モールド全体を倍率mで拡大あるいは縮小し、その後にオイラー回転を行う。回転角は、モールド上のパターンをウエハ上へ投影したものとウエハ上のチップとの重ね合わせ誤差が最小になるように決定する。
一般に、オイラー回転による座標の変換は、下記式(1)に示す行列で表される。
【0037】
【数1】
ここで、回転角は十分小さいので、角度に関する2次の項のみをとると、上記式(1)の行列は、下記式(2)のように簡単になる。
【0039】
【数2】
モールド面のウエハ面への投影は、下記式(3)のようになる。
【0041】
【数3】
一方、チップ歪みは下記式(4)に示す行列で表される(例えば、非特許文献4参照)。
【0043】
【数4】
上記式(3)と(4)とを比較すると、下記式(5)および(6)に示す関係が成立する。
【0045】
【数5】
【数6】
上記式(5)によりβは決まるが、αとγは一意的には決まらない。そこで、モールド全体の倍率も考慮すると、下記式(7)および(8)に示す関係が成立する。
【0048】
【数7】
【数8】
以上の式(5)〜式(8)に示すように、4変数に対して4つの式が連立しているので、これを解くことにより、倍率とオイラー角を一意的に決定することができる。
【0051】
歪み補正方法
図4は、本実施形態に係るプログラムが読み込まれることにより、倍率とオイラー角を制御する歪み補正方法を実現するパターン転写装置の要部ブロック図である。
【0052】
すなわち、パターン転写装置は、アライメントマークを検出するアライメント部30およびモールドステージの動作を制御する制御部31に接続された処理部32と、本実施形態に係るプログラムが格納された記憶部33とを有する。
【0053】
アライメント部30は、図1のアライメント光学系3に相当し、基板側アライメントマーク11やモールド側アライメントマーク21を検出する。
【0054】
制御部31は、処理部32からオイラー回転率についての信号を入力し、この信号に基づいて、可動ステージをオイラー回転させるべくモールドステージの脚部2cを制御する。また、処理部32からモールドの倍率についての信号を入力し、この倍率となるように倍率調整手段5によるモールド20への加熱あるいは荷重を制御する。
【0055】
処理部32および記憶部33は、主としてパーソナルコンピュータやワークステーション等の計算機から構成される。記憶部33としては、ハードディスクやフレキシブルディスク等の磁気記憶装置、CD−ROM等の読み出し専用メモリ、光磁気ディスクなど、各種の記録媒体が適用される。
【0056】
上記式(5)〜(8)の演算ステップが手順として記述されたプログラムが記憶部33に格納されており、実行する際には処理部32の不図示のメインメモリに読み込まれて不図示のCPUで実行される。
【0057】
図5に、処理部による処理のフローチャートを示す。
処理部32は、アライメント部30からのアライメントデータに基づいて、演算によりチップ歪みを算出し(ステップST1)、このチップ歪および上記の関係式(5)〜(8)に基づいてリアルタイムに転写単位領域であるチップ毎に必要なモールドステージを回転させるためのオイラー角とモールドの倍率を決定し、制御部31に出力する(ステップST2)。
以上のようにして決定されたオイラー角およびモールドの倍率に基づいて、制御部31によりモールドステージの姿勢と、モールドの寸法が調整される。
【0058】
例えば、図6(a)に示すように、転写単位領域としてのチップが存在する場合に、理想的な格子EからX方向およびY方向に均一な倍率で広がっているようなチップCh1の歪みに対しては、当該歪みに合わせるようにしてモールドの倍率を調整することにより、重ね合わせ精度が向上する。
【0059】
但し、モールドの倍率の調整は、直交性を満たしかつ等方性の倍率をもった歪みにしか対応できないため、図6(b)に示すように非直交性となったチップCh2の歪みや、図6(c)に示すようにX,Y方向で倍率差がある場合のチップCh3の歪みに対応することはできない。
【0060】
従って、図6(b)に示す非直交性のチップCh2の歪みに対しては、下地のチップの歪みに合わせた転写パターンとなるように、モールドステージによりモールドの姿勢が制御される。すなわち、モールドパターンは、理想的な格子Eに対応したものであるが、モールドの姿勢を変えて転写することにより、転写されたパターンは非直交性となる。
【0061】
また、図6(c)に示すX,Y方向の倍率差があるチップCh3の歪みに対しても、モールドステージによりモールドの姿勢を制御することにより補正する。すなわち、モールドの姿勢を変えて転写することにより、転写されたパターンは、X方向とY方向とで独立の倍率となる。
【0062】
さらに、図6(a)〜図6(c)に示す歪みを組み合わせたようなチップ歪みに対しても、上記したようにモールドの倍率および姿勢の双方を制御することにより、転写パターンを下地パターンに追従させることができ、その結果良好な重ね合わせ精度を実現することができる。
【0063】
アライメント方法
上記のパターン転写装置によるアライメントマークの検出方法について説明する。本例では、上記した被転写体である基板10の基板側アライメントマーク11とモールド側アライメントマーク21の相対位置を、モールド20を通して同時に検出するTTR(Through The Reticle)方式として、散乱光アライメント(SLA:Scattering Light Alignment) を用いる方法を述べる。なお、下地チップの歪みが正確に測定可能なアライメント方式であれば、これ以外の方法を用いることもできる。
【0064】
図7は、SLAアライメント方式を説明するための図である。なお、図7では、モールド20は凹凸パターンは省略しており、アライメントマークに着目した部分のみ示している。また、基板10側も被転写膜12は省略して示している。
【0065】
図7に示すように、モールド20には、モールド側アライメントマーク21とアライメントマークを検出するためのマーク検出用窓22が形成されている。モールド側アライメントマーク21は、モールド20の表面に形成された溝であっても貫通孔であってもよい。
【0066】
平行な光束のアライメント光L1,L2は、モールド面(図7でX−Y平面に平行な面)に対して斜方から照射される。すなわち、アライメント光L1,L2の光軸は、図7のY−Z平面に平行である。
【0067】
マーク検出用窓22を通って基板側アライメントマーク11で反射、散乱され再度マーク検出用窓22を通ってきたアライメント光L1を検出する。また、モールド側アライメントマーク21で反射、散乱されたアライメント光L2を検出する。
【0068】
例えば、図7(b)に示すように、複数の基板側アライメントマーク11およびモールド側アライメントマーク21が形成されており、検出された基板側アライメントマーク11およびモールド側アライメントマーク21の相対位置とアライメント光L1,L2の傾き角θとの相対関係から、モールド20に対するチップ歪みの検出のためのアライメントデータが作製される。
【0069】
上記のSLAアライメント方式は、もともとPXL(Pdoximity X−ray Lithography)のために開発された方法である。PXLの場合、X線の入射方向をふさがないために、アライメント光学系は、斜めに配置されている。一方、NILと称されるパターン転写装置では、このような制約がないので、アライメント光学系を垂直に配置してもよい。これにより、マーク検出用窓22の面積を小さくすることができる。
【0070】
以上のように、アライメント方法としては、電子線やX線あるいはイオンビームを用いたリソグラフィに使用されているアライメント光学系を同様に採用することができ、アライメントシステムに制限はない。
【0071】
転写プロセス
次に、上記のパターン転写装置による転写プロセスの一例について、図8に示すフローチャートおよび図9に示す工程断面図を参照して説明する。
【0072】
まず、例えば被転写膜12としてレジストを塗布した基板10を基板ステージ1により保持し(ステップST11)、凹凸構造のモールドパターンを有するモールド20をモールドステージ2により保持する(ステップST12)。これにより、図9(a)に示すように、基板10とモールド20とを近接させる。
【0073】
次に、基板ステージ1のヒータ1aにより基板10を加熱することにより、レジストの塑性を増加させる(ステップST13)。また、アライメント光学系3により基板側アライメントマーク11およびモールド側アライメントマーク21を検出して、チップとモールド20の相対位置や、基板10の各チップの倍率や非直交性やX,Y方向の倍率差といった歪みを検出する(ステップST14)。
【0074】
次に、アライメントマーク検出工程で検出されたモールド20とチップとの相対位置に基づいて、例えば基板ステージ1の制御により、モールド12とチップとの相対位置を最適に合わせる(ステップST15)。
【0075】
次に、アライメントマーク検出工程で検出された転写単位領域であるチップの歪みに応じてモールドステージ2によりモールド20の姿勢を制御し、倍率調整手段5によりモールド20の倍率を制御する(ステップST16)。
【0076】
次に、図9(b)に示すように、基板10とモールド20とを圧着させる(ステップST17)。基板10とモールド20との圧着は、油圧式ポンプ42によって基板ステージ1の下方より押圧される。この圧着によって、軟化している熱可塑性のレジストからなる被転写膜12は変形し、モールドパターンが転写される。
【0077】
次に、図9(c)に示すように、基板10を冷却した後、モールド20を引き離すと、レジストからなる被転写膜12に凹凸構造のパターンが形成される(ステップST18)。本実施形態では、ヒーター1aによる加熱を止めて基板10を冷却し、油圧ポンプ42の圧力弁43を開けて圧力を解除し、モールド20を引き離す。なお、モールド圧着時に、モールドの背後から紫外光を照射させてレジストを硬化させることもできる。この場合、モールドは石英等の光を透過させる材料で製造する必要がある。
【0078】
その後、図9(d)に示すように、エッチングにより凹部に残留しているレジストからなる被転写膜12が除去され、通常のリソグラフィで形成されたものと同様なレジストパターンが形成される。
【0079】
以上のステップST13〜ST18の処理を繰り返し各チップに行うことにより、例えばウエハからなる基板10の全面への転写プロセスが終了する。基板2の図示しない被加工膜は、上記のレジストをエッチングマスクとしてエッチングすることにより、加工される。
【0080】
上記の転写プロセスにおいて、モールドをレジストに印加するための距離が大きくなると、モールド20の変形やレジストのパターンの歪みが大きくなることから、薄膜レジストによるプロセスを用いることが好ましい。例えば、被転写膜21として、ArFリソグラフィの多層レジストプロセスの中間層として用いられるSOG(Spin−On−Glass)を70nm塗布した上に、PMMA(Poly−Methlmethacrylate) を70nm塗布する。この場合には、ステップST13のレジスト軟化工程では、基板を175℃まで加熱し、ステップST17の圧着工程では、4.4MPaの圧力でモールドをレジストに押し付けることで、パターンが転写される。
【0081】
また、ステップST17におけるモールドの圧着の圧力は、モールドの変形が許容範囲内になるように決定する必要がある。この最適値は、インプリント・プロセスの有限要素法(FEM)シミュレーションにより決定することができる(例えば、非特許文献5参照)。モールドの圧着時間は、形成されたレジストパターン断面の走査電子顕微鏡(SEM)観察等によってすることができる。
【0082】
なお、上記では代表的な方法のみを説明したが、NILと称される転写プロセスには様々なバリエーションがあり、いずれのバリエーションに対しても本実施形態に係るパターン転写装置およびパターン転写方法は適用可能である。
【0083】
例えば、レジストなしで直接モールドをシリコン基板に接触させ、モールド背後からレーザーを照射させることで、接触部のシリコンを溶融させ、ステップST19に示すエッチング工程なしで直接パターン加工してしまう方法が提案されており、これに適用することもできる。従って、本実施形態は、図8および図9に示すフローに限定されない(例えば、非特許文献2参照。)。
【0084】
モールド製造方法
次に、モールド製造方法について説明する。例えば現在マスク製造のためにも使用されているSOI(Silicon On Insulator) 基板を材料とする例について説明する。シリコン基板は、紫外(UV)光を透過しないので、上記したUV照射によりレジストを硬化させる方法には用いることはできない。しかし、シリコンをエッチングして微細なパターンを形成する技術は、デバイス製造、あるいはEPL,PEL用ステンシルマスク製造において非常に研究・開発されているので、微細なパターンを有するモールドを製造するためには、石英基板よりもシリコン基板の方が有利であると考えられるからである。但し、本発明では特にモールドを作製するための基板に限定はない。
【0085】
例えば、図10(a)に示すように、貼り合わせ法により製造された直径200mmのSOI基板を用いる場合、SOI層203の厚さが600nm、埋め込み酸化物層202の厚さが1000nm、シリコン基板201の厚さが725μmのSOI基板を用いることができる。
【0086】
まず、図10(b)に示すように、モールド側アライメントマーク21を加工する。これは、SOI基板の裏面、すなわち、シリコン基板201にレジストを塗布し、リソグラフィにより、図7(b)で示すようなドット状のパターンを描画し、レジストをマスクとしてシリコン基板201をエッチングすることにより得られる。各ドットのサイズは、0.3μm×1.5μmで、それが縦100μmの範囲に6列並んでいる。
【0087】
次に、図10(c)に示すように、SLAを用いるためのマーク検出用窓22を形成する。但し、透明な石英基板を用いる場合は、この窓は不要である。SOI基板の裏面に厚さ10μmのレジストを塗布し、窓に相当する領域の2か所を、例えば120μm×50μmの寸法で、コンタクトアライナー等で露光および現像する。これを、ICPエッチャーで埋め込み酸化物層202まで貫通させる。シリコンとその酸化物とのエッチング選択比は1000以上あるので、エッチングは埋め込み酸化物層202で止まる。
【0088】
次に、図11(d)に示すように、例えばSOI基板をHF溶液に浸漬させることにより、マーク検出用窓22の領域に露出した埋め込み酸化物層202を除去する。これにより、マーク検出用窓22の部分は、例えば厚さが600nmのSOI層のみが残る。
【0089】
SOI層の表面にレジストを塗布し、EB描画機により被転写膜に形成すべきデバイスパターンを描画し、かつ、マーク検出用窓に相当する薄膜となった領域も描画する。レジストは、例えば、化学増幅型のポジレジストを200nmの厚さで塗布する。現像後、レジストをマスクとしてエッチングすると、デバイスパターンが加工されると同時に、マーク検出用窓に相当する部分のSOI層203も除去されて、マーク検出用窓が開口する。薄膜となったSOI層の部分が貫通すると、イオンやラジカルが侵入するので、治具でエッチャーのステージを保護しておくことが好ましい。
以上のようにして、図11(e)に示すSOI基板より作製されたモールドが完成する。
【0090】
以上説明したように、本実施形態では、モールド20を任意のオイラー角により回転させて基板10に対するモールド20の姿勢を制御することにより、基板10に配置された各チップの非直交性の歪みや、X,Y方向で倍率差があるような歪みに追従した転写パターンを形成することができ、下地のパターンとの重ね合わせ精度を向上させることができる。
【0091】
また、モールド20に対し加熱あるいは横方向からの均一な荷重をかけることにより、モールド20の寸法を調整することにより、転写パターンの倍率を調整することもでき、下地のパターンとの重ね合わせ精度を向上させることができる。
【0092】
このように重ね合わせ精度が向上することにより、他のリソグラフィとの併用が可能となり、パターン転写装置の実用化が促進される。パターン転写装置の実現により、デバイスの製造コストの低減を図ることができる。また、上記したパターン転写装置は、PELの装置技術を応用して達成することができる。
【0093】
さらに、PELのステンシルマスク製造技術を用いてモールドを製造することにより、マスクとモールドの価格を下げることができる。
【0094】
本発明は、上記の実施形態の説明に限定されない。例えば、本実施形態では、本発明の姿勢制御手段がモールドステージに備えられている例について説明したが、基板ステージに備えられていてもよい。
【0095】
また、本実施形態では、SLAを用いたダイバイダイアライメント方式によりチップ歪みをインラインで補正して転写する例について説明したが、これに限定されるものではない。
【0096】
例えば、同じロットの基板(ウエハ)から一枚抜き出して、ウエハの各チップにモールドのアライメントマークを転写して、転写マークと各チップのアライメントマークとを検出することで、予め基板のチップ毎の歪みを決定しておいてもよい。この場合には、同一ロットの基板のチップ歪みの分布は全て等しいと推測して、他の基板の転写処理に際しチップ毎にモールドの姿勢を制御してパターン転写を行う。
【0097】
あるいは、グローバルアライメント方式を採用することもできる。この場合には、基板(ウエハ)のアライメントマークをオフライン観測し、各チップの歪みを予め検出しておく。そして、同一ロットの基板のチップ歪みの分布は全て等しいと推測して、他の基板の転写処理に際しチップ毎にモールドの姿勢を制御してパターン転写を行う。
その他、本発明の要旨を逸脱しない範囲で、種々の変更が可能である。
【0098】
【発明の効果】
本発明によれば、被転写体の歪みに合わせて転写パターンを補正することができ、被転写体との重ね合わせ精度を向上させることができる。
【図面の簡単な説明】
【図1】本実施形態に係るパターン転写装置の一例を示す概略構成図である。
【図2】モールドステージの一例を示す構成図である。
【図3】モールドステージによる歪み補正のアルゴリズムを説明するための図である。
【図4】本実施形態に係るパターン転写装置のうち、倍率とオイラー角を制御する要部構成を示すブロック図である。
【図5】本実施形態に係るパターン転写方法による、歪み補正のためのフローチャートである。
【図6】本実施形態に係るパターン転写装置による歪み補正を説明するための図である。
【図7】本実施形態に係るパターン転写装置によるアライメント方法を説明するための図である。
【図8】本実施形態に係るパターン転写方法のフローチャートである。
【図9】本実施形態に係るパターン転写方法を説明するための工程断面図である。
【図10】本実施形態に係るパターン転写方法に使用されるモールドの製造における工程断面図である。
【図11】本実施形態に係るパターン転写方法に使用されるモールドの製造における工程断面図である。
【符号の説明】
1…基板ステージ、1a…ヒータ、2…モールドステージ、2a…可動ステージ、2b…固定ステージ、2c…脚部、3…アライメント光学系、4…加圧機構、5…倍率調整手段、10…基板、11…基板側アライメントマーク、12…被転写膜、20…モールド、21…モールド側アライメントマーク、22…マーク検出用窓、30…アライメント部、31…制御部、32…処理部、33…記憶部、41…加圧板、42…油圧ポンプ、43…圧力弁、51…光源、52…レンズ、53…荷重印加手段、L1,L2…アライメント光、201…シリコン基板、202…埋め込み酸化物層、203…SOI層。
Claims (11)
- モールドに形成されたパターンを被転写体に押圧して、転写するパターン転写装置であって、
被転写体に対するモールドの姿勢を制御して、前記モールドのパターンを押圧した際に得られる前記転写パターンを変位させる姿勢制御手段と、
前記被転写体に対し前記モールドを前記姿勢をもって押圧する押圧手段と
を有するパターン転写装置。 - 前記モールドの寸法を調整して、前記モールドの倍率を補正する寸法調整手段をさらに有する
請求項1記載のパターン転写装置。 - 前記姿勢制御手段は、前記モールドを任意のオイラー角により回転させて前記被転写体に対する前記モールドの姿勢を制御する
請求項1記載のパターン転写装置。 - 前記姿勢制御手段は、前記被転写体を任意のオイラー角により回転させて前記被転写体に対する前記モールドの姿勢を制御する
請求項1記載のパターン転写装置。 - モールドに形成されたパターンを被転写体に押圧して、前記被転写体あるいは前記モールドを移動させて前記被転写体に押圧する工程を繰り返し行うパターン転写方法であって、
前記被転写体の歪みを検出する工程と、
検出された前記歪みに合わせた転写パターンとなるように、前記被転写体に対するモールドの姿勢を制御する工程と、
前記被転写体に対し前記姿勢をもって前記モールドを押圧する工程と
を有するパターン転写方法。 - 前記被転写体の歪みを検出する工程の後、前記モールドを押圧する工程の前に、前記モールドの寸法を制御して前記モールドの倍率を補正する工程をさらに有する
請求項5記載のパターン転写方法。 - 前記モールドの倍率を補正する工程において、前記モールドへの温度制御により前記モールドの倍率を補正する
請求項6記載のパターン転写方法。 - 前記モールドの倍率を補正する工程において、前記モールドへの荷重により前記モールドの倍率を補正する
請求項6記載のパターン転写方法。 - 前記被転写体の歪みを検出する工程において、転写毎に前記被転写体の転写単位領域のアライメントマークと前記モールドのアライメントマークを観測し、前記アライメントマークの位置に基づいて前記モールドに対する転写単位領域の歪みを検出する
請求項5記載のパターン転写方法。 - 被転写体に対するモールドの転写条件を決定するための処理をコンピュータに実行させるプログラムであって、
検出された前記被転写体のアライメントマークの位置に基づいて、前記被転写体の歪みを決定する手順と、
前記モールドを任意のオイラー角で回転させた場合に、モールドに形成されたパターンが前記歪みに合わせた転写パターンに変換されるために必要なオイラー角を算出する手順と、を実行させる
プログラム。 - 前記転写条件を算出する手順において、前記モールドの寸法を任意の倍率で変化させ、かつ任意のオイラー角で回転させた場合に、モールドに形成されたパターンが前記歪みに合わせた転写パターンに変換されるために必要な倍率およびオイラー角を算出する
請求項10記載のプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003130833A JP2004335808A (ja) | 2003-05-08 | 2003-05-08 | パターン転写装置、パターン転写方法およびプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003130833A JP2004335808A (ja) | 2003-05-08 | 2003-05-08 | パターン転写装置、パターン転写方法およびプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004335808A true JP2004335808A (ja) | 2004-11-25 |
Family
ID=33506217
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003130833A Pending JP2004335808A (ja) | 2003-05-08 | 2003-05-08 | パターン転写装置、パターン転写方法およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004335808A (ja) |
Cited By (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006082867A1 (ja) * | 2005-02-02 | 2006-08-10 | Scivax Corporation | ハイブリッド接離システム |
| JP2007088374A (ja) * | 2005-09-26 | 2007-04-05 | Dainippon Screen Mfg Co Ltd | 半導体装置の製造方法 |
| JP2007165400A (ja) * | 2005-12-09 | 2007-06-28 | Canon Inc | 加工方法 |
| JP2007200953A (ja) * | 2006-01-24 | 2007-08-09 | Hitachi Ltd | パターン形成方法およびパターン形成装置 |
| JP2007242893A (ja) * | 2006-03-08 | 2007-09-20 | Toshiba Corp | パターン転写方法およびパターン転写装置 |
| JP2007305647A (ja) * | 2006-05-09 | 2007-11-22 | Toppan Printing Co Ltd | ナノインプリント装置及びナノインプリント方法 |
| JP2008522412A (ja) * | 2004-11-30 | 2008-06-26 | モレキュラー・インプリンツ・インコーポレーテッド | ナノスケールのデバイスを製造するための干渉分析 |
| JP2008221821A (ja) * | 2006-04-18 | 2008-09-25 | Canon Inc | パターン転写装置、インプリント装置、パターン転写方法および位置合わせ方法 |
| US7547205B2 (en) | 2005-04-27 | 2009-06-16 | Industrial Technology Research Institute | Microimprint/nanoimprint uniform pressing apparatus |
| JP2009545163A (ja) * | 2006-07-24 | 2009-12-17 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー. | 接触リソグラフィのための位置合わせ |
| WO2009153925A1 (ja) * | 2008-06-17 | 2009-12-23 | 株式会社ニコン | ナノインプリント方法及び装置 |
| JP2010080861A (ja) * | 2008-09-29 | 2010-04-08 | Nikon Corp | 転写装置及びデバイス製造方法 |
| JP2010080863A (ja) * | 2008-09-29 | 2010-04-08 | Nikon Corp | 転写装置及びデバイス製造方法 |
| US7794222B2 (en) | 2005-06-08 | 2010-09-14 | Canon Kabushiki Kaisha | Mold, pattern forming method, and pattern forming apparatus |
| JP2011029235A (ja) * | 2009-07-21 | 2011-02-10 | Toshiba Corp | インプリント装置およびインプリント方法 |
| US7927089B2 (en) | 2005-06-08 | 2011-04-19 | Canon Kabushiki Kaisha | Mold, apparatus including mold, pattern transfer apparatus, and pattern forming method |
| JP2012505544A (ja) * | 2008-10-10 | 2012-03-01 | モレキュラー・インプリンツ・インコーポレーテッド | インプリント・リソグラフィ・システムでの硬化用のエネルギー源 |
| JP2012076307A (ja) * | 2010-09-30 | 2012-04-19 | Toppan Printing Co Ltd | パターン印刷方法 |
| WO2013047851A1 (en) * | 2011-09-29 | 2013-04-04 | Fujifilm Corporation | Nanoimprinting method, nanoimprinting apparatus for executing the nanoimprinting method, and method for producing patterned substrates |
| WO2013111606A1 (en) * | 2012-01-27 | 2013-08-01 | Canon Kabushiki Kaisha | Imprint apparatus and article manufacturing method using same |
| JP2013165278A (ja) * | 2013-03-25 | 2013-08-22 | Canon Inc | 加工装置 |
| US20130271945A1 (en) | 2004-02-06 | 2013-10-17 | Nikon Corporation | Polarization-modulating element, illumination optical apparatus, exposure apparatus, and exposure method |
| KR101348184B1 (ko) | 2007-01-19 | 2014-01-07 | 삼성디스플레이 주식회사 | 임프린트 장치 및 방법 |
| JP2014241396A (ja) * | 2013-05-14 | 2014-12-25 | キヤノン株式会社 | インプリント装置、インプリント方法および物品の製造方法 |
| US9341954B2 (en) | 2007-10-24 | 2016-05-17 | Nikon Corporation | Optical unit, illumination optical apparatus, exposure apparatus, and device manufacturing method |
| US9423698B2 (en) | 2003-10-28 | 2016-08-23 | Nikon Corporation | Illumination optical apparatus and projection exposure apparatus |
| JP2017050428A (ja) * | 2015-09-02 | 2017-03-09 | キヤノン株式会社 | インプリント装置、インプリント方法および物品の製造方法 |
| US9678332B2 (en) | 2007-11-06 | 2017-06-13 | Nikon Corporation | Illumination apparatus, illumination method, exposure apparatus, and device manufacturing method |
| US9678437B2 (en) | 2003-04-09 | 2017-06-13 | Nikon Corporation | Illumination optical apparatus having distribution changing member to change light amount and polarization member to set polarization in circumference direction |
| US9885872B2 (en) | 2003-11-20 | 2018-02-06 | Nikon Corporation | Illumination optical apparatus, exposure apparatus, and exposure method with optical integrator and polarization member that changes polarization state of light |
| US9891539B2 (en) | 2005-05-12 | 2018-02-13 | Nikon Corporation | Projection optical system, exposure apparatus, and exposure method |
| US10101666B2 (en) | 2007-10-12 | 2018-10-16 | Nikon Corporation | Illumination optical apparatus, exposure apparatus, and device manufacturing method |
-
2003
- 2003-05-08 JP JP2003130833A patent/JP2004335808A/ja active Pending
Cited By (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9885959B2 (en) | 2003-04-09 | 2018-02-06 | Nikon Corporation | Illumination optical apparatus having deflecting member, lens, polarization member to set polarization in circumference direction, and optical integrator |
| US9678437B2 (en) | 2003-04-09 | 2017-06-13 | Nikon Corporation | Illumination optical apparatus having distribution changing member to change light amount and polarization member to set polarization in circumference direction |
| US9423698B2 (en) | 2003-10-28 | 2016-08-23 | Nikon Corporation | Illumination optical apparatus and projection exposure apparatus |
| US9760014B2 (en) | 2003-10-28 | 2017-09-12 | Nikon Corporation | Illumination optical apparatus and projection exposure apparatus |
| US10281632B2 (en) | 2003-11-20 | 2019-05-07 | Nikon Corporation | Illumination optical apparatus, exposure apparatus, and exposure method with optical member with optical rotatory power to rotate linear polarization direction |
| US9885872B2 (en) | 2003-11-20 | 2018-02-06 | Nikon Corporation | Illumination optical apparatus, exposure apparatus, and exposure method with optical integrator and polarization member that changes polarization state of light |
| US20130271945A1 (en) | 2004-02-06 | 2013-10-17 | Nikon Corporation | Polarization-modulating element, illumination optical apparatus, exposure apparatus, and exposure method |
| US10007194B2 (en) | 2004-02-06 | 2018-06-26 | Nikon Corporation | Polarization-modulating element, illumination optical apparatus, exposure apparatus, and exposure method |
| US10241417B2 (en) | 2004-02-06 | 2019-03-26 | Nikon Corporation | Polarization-modulating element, illumination optical apparatus, exposure apparatus, and exposure method |
| US10234770B2 (en) | 2004-02-06 | 2019-03-19 | Nikon Corporation | Polarization-modulating element, illumination optical apparatus, exposure apparatus, and exposure method |
| JP2008522412A (ja) * | 2004-11-30 | 2008-06-26 | モレキュラー・インプリンツ・インコーポレーテッド | ナノスケールのデバイスを製造するための干渉分析 |
| WO2006082867A1 (ja) * | 2005-02-02 | 2006-08-10 | Scivax Corporation | ハイブリッド接離システム |
| US7547205B2 (en) | 2005-04-27 | 2009-06-16 | Industrial Technology Research Institute | Microimprint/nanoimprint uniform pressing apparatus |
| US9891539B2 (en) | 2005-05-12 | 2018-02-13 | Nikon Corporation | Projection optical system, exposure apparatus, and exposure method |
| US7794222B2 (en) | 2005-06-08 | 2010-09-14 | Canon Kabushiki Kaisha | Mold, pattern forming method, and pattern forming apparatus |
| US9046793B2 (en) | 2005-06-08 | 2015-06-02 | Canon Kabushiki Kaisha | Light transmissive mold and apparatus for imprinting a pattern onto a material applied on a semiconductor workpiece and related methods |
| US7927089B2 (en) | 2005-06-08 | 2011-04-19 | Canon Kabushiki Kaisha | Mold, apparatus including mold, pattern transfer apparatus, and pattern forming method |
| US8770958B2 (en) | 2005-06-08 | 2014-07-08 | Canon Kabushiki Kaisha | Pattern forming method and pattern forming apparatus in which a substrate and a mold are aligned in an in-plane direction |
| JP2007088374A (ja) * | 2005-09-26 | 2007-04-05 | Dainippon Screen Mfg Co Ltd | 半導体装置の製造方法 |
| JP2007165400A (ja) * | 2005-12-09 | 2007-06-28 | Canon Inc | 加工方法 |
| JP4736821B2 (ja) * | 2006-01-24 | 2011-07-27 | 株式会社日立製作所 | パターン形成方法およびパターン形成装置 |
| JP2007200953A (ja) * | 2006-01-24 | 2007-08-09 | Hitachi Ltd | パターン形成方法およびパターン形成装置 |
| JP2007242893A (ja) * | 2006-03-08 | 2007-09-20 | Toshiba Corp | パターン転写方法およびパターン転写装置 |
| JP2008221821A (ja) * | 2006-04-18 | 2008-09-25 | Canon Inc | パターン転写装置、インプリント装置、パターン転写方法および位置合わせ方法 |
| JP2007305647A (ja) * | 2006-05-09 | 2007-11-22 | Toppan Printing Co Ltd | ナノインプリント装置及びナノインプリント方法 |
| JP2009545163A (ja) * | 2006-07-24 | 2009-12-17 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー. | 接触リソグラフィのための位置合わせ |
| KR101348184B1 (ko) | 2007-01-19 | 2014-01-07 | 삼성디스플레이 주식회사 | 임프린트 장치 및 방법 |
| US10101666B2 (en) | 2007-10-12 | 2018-10-16 | Nikon Corporation | Illumination optical apparatus, exposure apparatus, and device manufacturing method |
| US9857599B2 (en) | 2007-10-24 | 2018-01-02 | Nikon Corporation | Optical unit, illumination optical apparatus, exposure apparatus, and device manufacturing method |
| US9341954B2 (en) | 2007-10-24 | 2016-05-17 | Nikon Corporation | Optical unit, illumination optical apparatus, exposure apparatus, and device manufacturing method |
| US9678332B2 (en) | 2007-11-06 | 2017-06-13 | Nikon Corporation | Illumination apparatus, illumination method, exposure apparatus, and device manufacturing method |
| JPWO2009153925A1 (ja) * | 2008-06-17 | 2011-11-24 | 株式会社ニコン | ナノインプリント方法及び装置 |
| WO2009153925A1 (ja) * | 2008-06-17 | 2009-12-23 | 株式会社ニコン | ナノインプリント方法及び装置 |
| JP2010080861A (ja) * | 2008-09-29 | 2010-04-08 | Nikon Corp | 転写装置及びデバイス製造方法 |
| JP2010080863A (ja) * | 2008-09-29 | 2010-04-08 | Nikon Corp | 転写装置及びデバイス製造方法 |
| JP2012505544A (ja) * | 2008-10-10 | 2012-03-01 | モレキュラー・インプリンツ・インコーポレーテッド | インプリント・リソグラフィ・システムでの硬化用のエネルギー源 |
| JP2011029235A (ja) * | 2009-07-21 | 2011-02-10 | Toshiba Corp | インプリント装置およびインプリント方法 |
| JP2012076307A (ja) * | 2010-09-30 | 2012-04-19 | Toppan Printing Co Ltd | パターン印刷方法 |
| JP2013074258A (ja) * | 2011-09-29 | 2013-04-22 | Fujifilm Corp | ナノインプリント方法およびそれに用いられるナノインプリント装置並びにパターン化基板の製造方法 |
| WO2013047851A1 (en) * | 2011-09-29 | 2013-04-04 | Fujifilm Corporation | Nanoimprinting method, nanoimprinting apparatus for executing the nanoimprinting method, and method for producing patterned substrates |
| WO2013111606A1 (en) * | 2012-01-27 | 2013-08-01 | Canon Kabushiki Kaisha | Imprint apparatus and article manufacturing method using same |
| US9851634B2 (en) | 2012-01-27 | 2017-12-26 | Canon Kabushiki Kaisha | Imprint apparatus |
| KR20140107517A (ko) * | 2012-01-27 | 2014-09-04 | 캐논 가부시끼가이샤 | 임프린트 장치 및 이를 이용한 물품의 제조 방법 |
| CN104067373A (zh) * | 2012-01-27 | 2014-09-24 | 佳能株式会社 | 压印装置和使用其的物品制造方法 |
| KR101656161B1 (ko) | 2012-01-27 | 2016-09-08 | 캐논 가부시끼가이샤 | 임프린트 장치 및 이를 이용한 물품의 제조 방법 |
| JP2013165278A (ja) * | 2013-03-25 | 2013-08-22 | Canon Inc | 加工装置 |
| JP2014241396A (ja) * | 2013-05-14 | 2014-12-25 | キヤノン株式会社 | インプリント装置、インプリント方法および物品の製造方法 |
| US10493667B2 (en) | 2013-05-14 | 2019-12-03 | Canon Kabushiki Kaisha | Imprint apparatus, imprint method, and method of manufacturing article |
| JP2017050428A (ja) * | 2015-09-02 | 2017-03-09 | キヤノン株式会社 | インプリント装置、インプリント方法および物品の製造方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004335808A (ja) | パターン転写装置、パターン転写方法およびプログラム | |
| JP4478424B2 (ja) | 微細加工装置およびデバイスの製造方法 | |
| JP4827513B2 (ja) | 加工方法 | |
| US7323130B2 (en) | Magnification correction employing out-of-plane distortion of a substrate | |
| US6929762B2 (en) | Method of reducing pattern distortions during imprint lithography processes | |
| US7019819B2 (en) | Chucking system for modulating shapes of substrates | |
| US20040112861A1 (en) | Method for modulating shapes of substrates | |
| JP6019685B2 (ja) | ナノインプリント方法及びナノインプリント装置 | |
| JP2005101201A (ja) | ナノインプリント装置 | |
| JP4262267B2 (ja) | モールド、インプリント装置及びデバイスの製造方法 | |
| JP2004259985A (ja) | レジストパターン形成装置およびその形成方法、および、当該方法を用いた半導体装置の製造方法 | |
| US11837469B2 (en) | Imprint apparatus, imprint method, and method of manufacturing semiconductor device | |
| JP4194514B2 (ja) | 露光用マスクの設計方法及び製造方法 | |
| EP1795958A1 (en) | Method of fabricating nanoimprint mold | |
| JP2007027361A (ja) | インプリント用モールド | |
| JP2007299994A (ja) | 加工装置及び方法、並びに、デバイス製造方法 | |
| JP5050532B2 (ja) | インプリントモールド、インプリントモールド製造方法および表面改質装置 | |
| JP2005085922A (ja) | マスク作製方法及び微小開口を有するマスク | |
| US20200363716A1 (en) | Imprint method, imprint apparatus, manufacturing method of mold, and article manufacturing method | |
| Choi et al. | Layer-to-layer alignment for step and flash imprint lithography | |
| JP6277588B2 (ja) | パターン形成方法及びナノインプリント用テンプレートの製造方法 | |
| JP7089411B2 (ja) | 成形装置及び物品の製造方法 | |
| JP3984935B2 (ja) | 近接場露光マスク及び近接場露光マスクの製造方法 | |
| WO2021172003A1 (ja) | 膜形成装置、膜形成方法、および物品の製造方法 | |
| JP2004235221A (ja) | マスクの製造方法、パターンの形成方法、歪計測用フォトマスクおよび半導体装置の製造方法 |