ES2848201T3 - Métodos para bloquear y / o desbloquear un vehículo eléctrico y aparato asociado - Google Patents
Métodos para bloquear y / o desbloquear un vehículo eléctrico y aparato asociado Download PDFInfo
- Publication number
- ES2848201T3 ES2848201T3 ES19197675T ES19197675T ES2848201T3 ES 2848201 T3 ES2848201 T3 ES 2848201T3 ES 19197675 T ES19197675 T ES 19197675T ES 19197675 T ES19197675 T ES 19197675T ES 2848201 T3 ES2848201 T3 ES 2848201T3
- Authority
- ES
- Spain
- Prior art keywords
- vehicle
- mobile device
- signal
- user
- response
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 70
- 230000004044 response Effects 0.000 claims abstract description 40
- 238000004891 communication Methods 0.000 claims description 24
- 230000009471 action Effects 0.000 claims description 9
- 230000003213 activating effect Effects 0.000 claims 1
- 230000000881 depressing effect Effects 0.000 claims 1
- 230000006870 function Effects 0.000 description 38
- 238000005516 engineering process Methods 0.000 description 34
- 230000008569 process Effects 0.000 description 25
- 238000010586 diagram Methods 0.000 description 16
- 238000005259 measurement Methods 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 238000001914 filtration Methods 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 230000007613 environmental effect Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 238000012790 confirmation Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000000737 periodic effect Effects 0.000 description 2
- 230000000153 supplemental effect Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000004146 energy storage Methods 0.000 description 1
- 230000001815 facial effect Effects 0.000 description 1
- 230000003100 immobilizing effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/30—Detection related to theft or to other events relevant to anti-theft systems
- B60R25/34—Detection related to theft or to other events relevant to anti-theft systems of conditions of vehicle components, e.g. of windows, door locks or gear selectors
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B85/00—Details of vehicle locks not provided for in groups E05B77/00 - E05B83/00
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/20—Means to switch the anti-theft system on or off
- B60R25/24—Means to switch the anti-theft system on or off using electronic identifiers containing a code not memorised by the user
- B60R25/245—Means to switch the anti-theft system on or off using electronic identifiers containing a code not memorised by the user where the antenna reception area plays a role
-
- B60K35/22—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/01—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles operating on vehicle systems or fittings, e.g. on doors, seats or windscreens
- B60R25/04—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles operating on vehicle systems or fittings, e.g. on doors, seats or windscreens operating on the propulsion system, e.g. engine or drive motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/01—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles operating on vehicle systems or fittings, e.g. on doors, seats or windscreens
- B60R25/04—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles operating on vehicle systems or fittings, e.g. on doors, seats or windscreens operating on the propulsion system, e.g. engine or drive motor
- B60R25/045—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles operating on vehicle systems or fittings, e.g. on doors, seats or windscreens operating on the propulsion system, e.g. engine or drive motor by limiting or cutting the electrical supply to the propulsion unit
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/10—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles actuating a signalling device
- B60R25/104—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles actuating a signalling device characterised by the type of theft warning signal, e.g. visual or audible signals with special characteristics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/20—Means to switch the anti-theft system on or off
- B60R25/209—Remote starting of engine
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/20—Means to switch the anti-theft system on or off
- B60R25/22—Means to switch the anti-theft system on or off using mechanical identifiers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/20—Means to switch the anti-theft system on or off
- B60R25/24—Means to switch the anti-theft system on or off using electronic identifiers containing a code not memorised by the user
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B77/00—Vehicle locks characterised by special functions or purposes
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B81/00—Power-actuated vehicle locks
- E05B81/02—Power-actuated vehicle locks characterised by the type of actuators used
- E05B81/04—Electrical
- E05B81/06—Electrical using rotary motors
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C9/00—Individual registration on entry or exit
- G07C9/00174—Electronically operated locks; Circuits therefor; Nonmechanical keys therefor, e.g. passive or active electrical keys or other data carriers without mechanical keys
- G07C9/00309—Electronically operated locks; Circuits therefor; Nonmechanical keys therefor, e.g. passive or active electrical keys or other data carriers without mechanical keys operated with bidirectional data transmission between data carrier and locks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/021—Services related to particular areas, e.g. point of interest [POI] services, venue services or geofences
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/023—Services making use of location information using mutual or relative location information between multiple location based services [LBS] targets or of distance thresholds
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/80—Services using short range communication, e.g. near-field communication [NFC], radio-frequency identification [RFID] or low energy communication
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/10—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles actuating a signalling device
- B60R2025/1013—Alarm systems characterised by the type of warning signal, e.g. visual, audible
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2325/00—Indexing scheme relating to vehicle anti-theft devices
- B60R2325/10—Communication protocols, communication systems of vehicle anti-theft devices
- B60R2325/101—Bluetooth
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2325/00—Indexing scheme relating to vehicle anti-theft devices
- B60R2325/10—Communication protocols, communication systems of vehicle anti-theft devices
- B60R2325/108—Encryption
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2325/00—Indexing scheme relating to vehicle anti-theft devices
- B60R2325/20—Communication devices for vehicle anti-theft devices
- B60R2325/205—Mobile phones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2325/00—Indexing scheme relating to vehicle anti-theft devices
- B60R2325/30—Vehicles applying the vehicle anti-theft devices
- B60R2325/306—Motorcycles
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C9/00—Individual registration on entry or exit
- G07C9/00174—Electronically operated locks; Circuits therefor; Nonmechanical keys therefor, e.g. passive or active electrical keys or other data carriers without mechanical keys
- G07C9/00309—Electronically operated locks; Circuits therefor; Nonmechanical keys therefor, e.g. passive or active electrical keys or other data carriers without mechanical keys operated with bidirectional data transmission between data carrier and locks
- G07C2009/00317—Electronically operated locks; Circuits therefor; Nonmechanical keys therefor, e.g. passive or active electrical keys or other data carriers without mechanical keys operated with bidirectional data transmission between data carrier and locks keyless data carrier having only one limited data transmission range
- G07C2009/00333—Electronically operated locks; Circuits therefor; Nonmechanical keys therefor, e.g. passive or active electrical keys or other data carriers without mechanical keys operated with bidirectional data transmission between data carrier and locks keyless data carrier having only one limited data transmission range and the lock having more than one limited data transmission ranges
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C2209/00—Indexing scheme relating to groups G07C9/00 - G07C9/38
- G07C2209/60—Indexing scheme relating to groups G07C9/00174 - G07C9/00944
- G07C2209/63—Comprising locating means for detecting the position of the data carrier, i.e. within the vehicle or within a certain distance from the vehicle
Abstract
Un método (500) para controlar un vehículo (101), que comprende: recibir (501) una señal inalámbrica desde un dispositivo móvil (103, 105); analizar (503) al menos una característica de la señal inalámbrica para determinar una ubicación actual del dispositivo móvil (103, 105); desbloquear (505) el vehículo (101) en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil (103, 105) está dentro de un límite interno adyacente al vehículo (101), y que se recibe una primera señal desde un primer componente de entrada / salida (I / O) del vehículo (101); y bloquear (507) el vehículo (101) en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil (103, 105) es externo a un límite externo (109) externo al límite interno (111), en que el método comprende además: en respuesta a la determinación de que el dispositivo móvil (103, 105) se mueve a través del límite interno (111) hacia el vehículo (101), encender una pantalla del vehículo (101) alimentada por una batería del vehículo (101).
Description
DESCRIPCIÓN
Métodos para bloquear y / o desbloquear un vehículo eléctrico y aparato asociado
La presente tecnología está dirigida a sistemas y métodos para bloquear y / o desbloquear un vehículo. Más en particular, la presente tecnología está dirigida a sistemas y métodos para bloquear y / o desbloquear un vehículo eléctrico basándose en la ubicación de un objeto móvil o un dispositivo móvil que lleva un usuario.
Los sistemas de bloqueo de vehículos se utilizan para evitar que usuarios no autorizados accedan, operen o roben vehículos. Tradicionalmente, los usuarios pueden bloquear o desbloquear vehículos con llaves físicas. Sin embargo, bajo ciertas circunstancias, no es conveniente para los usuarios bloquear / desbloquear su vehículo con llaves tradicionales. Por ejemplo, las manos de un usuario pueden estar ocupadas y, por lo tanto, no pueden sostener / manejar / operar una llave tradicional. Por lo tanto, resulta ventajoso disponer de un sistema mejorado para abordar este problema.
Por ejemplo; el documento WO 2017/182556 A1 da a conocer un sistema y un método para la inmovilización de vehículos, en particular vehículos de dos ruedas como por ejemplo motocicletas, a través de una conexión Bluetooth de un teléfono celular con una unidad de control del motor. Además, el documento US 2010/075656 A1 describe un sistema y un método para desbloquear un vehículo con un teléfono celular. Las señales inalámbricas se monitorean desde un teléfono celular. Se recibe una señal del teléfono celular. Se determina una distancia entre el teléfono celular y el vehículo. Las puertas del vehículo se desbloquean en respuesta a que el teléfono celular se acerca al vehículo. Las puertas del vehículo se bloquean en respuesta a que el teléfono celular se separa aún más del vehículo. A través del documento EP 1669264 A1 se conocen otros sistemas y métodos para bloquear y / o desbloquear un vehículo.
A la vista de lo anterior, la presente invención proporciona un método para controlar un vehículo de acuerdo con la reivindicación 1 y un vehículo de acuerdo con la reivindicación 12. En las reivindicaciones dependientes se describen otras formas de realización ventajosas.
Las formas de realización de la tecnología descrita se describirán y explicarán mediante el uso de los dibujos adjuntos.
La Figura 1A es un diagrama esquemático que ilustra un sistema de acuerdo con formas de realización de la tecnología descrita.
La Figura 1B es un diagrama esquemático que ilustra un proceso de desbloqueo de un vehículo de acuerdo con formas de realización de la tecnología descrita.
La Figura 1C es un diagrama esquemático que ilustra un proceso de bloqueo de un vehículo de acuerdo con formas de realización de la tecnología descrita.
La Figura 2A es un diagrama esquemático (vista superior) que ilustra múltiples trayectorias de un objeto móvil asociado con un vehículo de acuerdo con formas de realización de la tecnología descrita.
La Figura 2B es un diagrama esquemático (vista superior) que ilustra múltiples zonas no concéntricas asociadas con un vehículo de acuerdo con formas de realización de la tecnología descrita.
La Figura 2C es un diagrama esquemático (vista superior) que ilustra múltiples zonas con diversas formas asociadas con un vehículo de acuerdo con formas de realización de la tecnología descrita.
La Figura 3A es un diagrama esquemático que ilustra diversos estados de un vehículo durante un proceso de desbloqueo automático de acuerdo con formas de realización de la tecnología descrita.
La Figura 3B es un diagrama esquemático que ilustra diversos estados de un vehículo durante un proceso de desbloqueo automático de acuerdo con formas de realización de la tecnología descrita.
La Figura 4 es un diagrama esquemático que ilustra un sistema de acuerdo con formas de realización de la tecnología descrita.
La Figura 5 es un diagrama de flujo que ilustra un método de acuerdo con formas de realización de la tecnología descrita.
La Figura 6 es un diagrama de flujo que ilustra un método de acuerdo con formas de realización de la tecnología descrita.
La Figura 7 es un diagrama de flujo que ilustra un método de acuerdo con formas de realización de la tecnología descrita.
Los dibujos no están necesariamente dibujados a escala. Por ejemplo, las dimensiones de algunos de los elementos de las Figuras pueden ampliarse o reducirse para ayudar a mejorar la comprensión de diversas formas de realización. De manera similar, algunos componentes y / u operaciones pueden separarse en diferentes bloques o combinarse en un solo bloque con el propósito de describir algunas de las formas de realización. Además, aunque se han mostrado formas de realización específicas a modo de ejemplo en los dibujos y se han descrito en detalle a continuación, un experto en la técnica reconocerá que las modificaciones, equivalentes y alternativas entrarán dentro del alcance de las reivindicaciones adjuntas.
En esta descripción, las referencias a "algunas formas de realización", "una forma de realización" o similares, significan que la característica, función, estructura o característica particular que se describe está incluida en al menos una forma de realización de la tecnología descrita. Las apariciones de tales frases en esta memoria descriptiva no necesariamente se refieren todas ellas a la misma forma de realización. Por otra parte, las formas de realización mencionadas no son necesariamente mutuamente excluyentes.
La presente descripción se refiere a vehículos y métodos para permitir a un usuario desbloquear o bloquear un vehículo (por ejemplo, de dos ruedas, de tres ruedas, de cuatro ruedas, etc.) sin utilizar una llave tradicional. Cuando el usuario se acerca al vehículo, el sistema descrito se comunica con (o detecta señales de) un dispositivo móvil que lleva el usuario y a continuación determina si desbloquear el vehículo. En algunas formas de realización, el sistema descrito recibe información con respecto a las ubicaciones y / o a las trayectorias en movimiento del usuario (por ejemplo, al comunicarse con el dispositivo móvil), y a continuación determina si desbloquea o bloquea el vehículo. Por ejemplo, el sistema puede desbloquear el vehículo para el usuario si determina que el usuario se acerca al vehículo y tiene la intención de comenzar a operar el vehículo. Por ejemplo, desde las ubicaciones (por ejemplo, dentro de una distancia predeterminada del vehículo) y / o las trayectorias en movimiento del usuario, el sistema puede aprender que el usuario se acerca al vehículo o incluso se sienta en (o se para al lado) del vehículo durante un período de tiempo predeterminado (por ejemplo, 2-10 segundos), lo que sugiere que el usuario puede querer comenzar a operar el vehículo. Como otro ejemplo, si el sistema determina que el usuario está abandonando el vehículo (por ejemplo, está alejándose del vehículo, está cruzando una línea de límite, etc.), el sistema puede entonces bloquear el vehículo.
El sistema descrito desbloquea el vehículo encendiendo la alimentación del vehículo (por ejemplo, proporcionada por una batería), lo que permite al usuario arrancar un motor del vehículo. En algunas formas de realización, cuando se desbloquea un vehículo, un usuario puede presionar un botón físico o virtual (por ejemplo, un botón "GO" o "INICIO" colocado / dispuesto adyacente o formado / dispuesto integralmente con un tablero del vehículo; o un Botón "GO" que se muestra en un tablero del vehículo o en una pantalla del dispositivo móvil del usuario) para arrancar el motor del vehículo. En algunas formas de realización, para arrancar el motor, el sistema puede además pedirle al usuario que realice una acción específica (por ejemplo, sujetar una palanca de freno, colocar un manillar en un cierto ángulo, etc.) junto con presionar el botón.
Un aspecto de la tecnología actual incluye proporcionar un sistema de seguridad para vehículos que bloquea automáticamente un vehículo en función de la ubicación o de las trayectorias en movimiento de un usuario. Por ejemplo, cuando el usuario se aleja del vehículo, el sistema descrito puede comunicarse con (o detectar señales de) un dispositivo móvil que lleva el usuario y a continuación determina si bloquea el vehículo. A partir de las ubicaciones y / o trayectorias de movimiento del usuario, el sistema puede saber que el usuario ha abandonado el vehículo, lo que sugiere que el usuario puede querer bloquear el vehículo. En dichas formas de realización, el sistema puede bloquear el vehículo para el usuario si determina que el usuario ha abandonado el vehículo. En otras formas de realización, el sistema puede bloquear el vehículo si el sistema determina que el usuario tiene la intención de dejar el vehículo durante un período de tiempo prolongado (por ejemplo, más de 5 minutos).
El sistema descrito puede bloquear el vehículo apagando la alimentación del vehículo (por ejemplo, alimentación proporcionada por una batería al motor y / u otros sistemas principales, como por ejemplo los sistemas de dirección / frenado / iluminación, del vehículo), lo que evita que el usuario arranque un motor del vehículo (a través de un componente alimentado por la batería, como por ejemplo una interfaz de usuario que se muestra en una pantalla) o que de otra forma haga funcionar el motor del vehículo. Una vez que un vehículo está bloqueado, si un usuario desea operar (por ejemplo, conducir o montar) el vehículo, el usuario necesita ser autenticado (por ejemplo, una autenticación realizada entre el sistema descrito y el dispositivo móvil de forma inalámbrica, o una señal autenticada recibida por el sistema a través de un módulo inalámbrico como por ejemplo un módulo Bluetooth, un lector de comunicación de campo cercano (NFC) o similar) para encender la alimentación del vehículo (por ejemplo, proporcionar energía eléctrica a un sistema principal / básico del vehículo) y el motor del vehículo. En algunas formas de realización, el sistema descrito puede bloquear automáticamente el vehículo cuando determina que el usuario está lejos del vehículo (por ejemplo, la distancia entre un dispositivo móvil que lleva el usuario y el vehículo es mayor que un umbral de distancia de "bloqueo automático"). Por ejemplo, cuando
el sistema determina que el usuario está ausente (por ejemplo, fuera de una determinada zona o área) durante un tiempo específico (por ejemplo, 3-10 segundos), el sistema puede bloquear automáticamente el vehículo. En algunas formas de realización, el sistema puede determinar que el usuario está ausente basándose en el análisis de la intensidad de la señal, la calidad de la comunicación y / u otras características adecuadas, como por ejemplo las coordenadas GPS enviadas desde el dispositivo móvil.
En algunas formas de realización, la tecnología descrita permite a un usuario configurar múltiples zonas y, en consecuencia, el sistema puede realizar el bloqueo automático y el desbloqueo automático basándose en estas zonas. En algunas formas de realización, las zonas se pueden determinar / configurar en función de las distancias desde un vehículo, la intensidad de la señal / las características de un dispositivo móvil que lleva un usuario, factores ambientales (por ejemplo, el vehículo está estacionado en un estacionamiento al aire libre o en un edificio), preferencias del usuario, etc.
Otro aspecto de la tecnología actual incluye proporcionar un sistema que pueda gestionar de forma eficaz varios estados de un vehículo. Estos estados incluyen un estado "bloqueado" (por ejemplo, la alimentación de la batería del vehículo está apagada), un estado "Encendido Automático de Proximidad" o "Apagado Automático de Proximidad" (por ejemplo, un módulo / componente / proceso de proximidad está activado para habilitar el desbloqueo automático o el bloqueo automático de acuerdo con la ubicación o las trayectorias en movimiento de los usuarios), un estado "desbloqueado" (por ejemplo, la alimentación de la batería del vehículo está encendida pero un motor del vehículo permanece apagado), y un estado "listo para operar" (por ejemplo, tanto la alimentación de la batería como el motor del vehículo están encendidos). El sistema descrito permite a los usuarios personalizar las formas en que pueden interactuar con el vehículo y los niveles de seguridad deseados en estos diferentes estados. Las formas de realización de estos estados se comentan en detalle a continuación con referencia a las Figuras 3A y 3B.
Cuando un vehículo se encuentra en el estado "bloqueado", la alimentación de la batería del vehículo está apagada (por ejemplo, un tablero del vehículo está apagado) y el motor del vehículo también está apagado. En algunas formas de realización, se utilizan uno o más bloqueos (como por ejemplo un bloqueo de manillar, bloqueo de rueda o bloqueo del sistema de transmisión) para restringir los movimientos del vehículo. En esta fase, un dispositivo de medición de distancia del vehículo (por ejemplo, un dispositivo / módulo de comunicación Bluetooth, un módulo GPS, un módulo de telecomunicaciones o componentes con funciones similares) aún puede estar activo para monitorear / buscar señales desde el dispositivo móvil de un usuario o similar. Por ejemplo, los vehículos en el estado bloqueado a menudo están estacionados y no están en funcionamiento.
Cuando el dispositivo de medición de distancia de un vehículo detecta que una señal que indica que un dispositivo móvil autorizado (por ejemplo, un dispositivo móvil que está asociado con el vehículo a través de una cuenta de usuario) está dentro del alcance (por ejemplo, cerca del vehículo), el dispositivo de medición de distancia notifica al sistema que active una función "Encendido Automático de Proximidad", y a continuación el vehículo entra en el estado de "Encendido Automático de Proximidad". Para indicar la entrada de este estado, el sistema puede encender una luz indicadora. Por ejemplo, una luz "iQ" en el tablero del vehículo y una notificación en el dispositivo móvil pueden mostrar que se ha establecido una conexión Bluetooth. En algunas formas de realización, la luz indicativa puede ser una luz existente del vehículo, como por ejemplo una luz de dirección, una luz delantera, una luz intermitente, etc. En tales formas de realización, la luz indicativa puede parpadear una o más veces (por ejemplo, dos veces) para indicar la entrada en el estado de "Encendido Automático de Proximidad". La luz indicadora puede ser alimentada por una batería separada (en comparación con una batería principal del vehículo, que se utiliza para alimentar la mayoría de las partes del vehículo). En algunas formas de realización, los sonidos del vehículo también se pueden utilizar para indicar la entrada en el estado de "Encendido Automático de Proximidad" junto con la luz indicativa. En algunas formas de realización, los sonidos del vehículo solo se pueden usar para indicar la entrada en el estado de "Encendido Automático de Proximidad".
Cuando un vehículo se encuentra en el estado de "Encendido Automático de Proximidad", la alimentación de la batería del vehículo (por ejemplo, la batería principal mencionada anteriormente) y el motor permanecen apagados. En esta etapa, el sistema sigue monitoreando las ubicaciones del dispositivo móvil del usuario detectado. Una vez que se cumple(n) cierto(s) criterio(s) (por ejemplo, el dispositivo móvil está lo suficientemente cerca), el sistema puede desbloquear (o bloquear) el vehículo encendiendo (o apagando) la alimentación del vehículo (por ejemplo, proporcionada por la batería principal mencionada anteriormente). En algunas formas de realización, en esta etapa, el sistema aún permite que un usuario opere el vehículo de formas predeterminadas, como por ejemplo abrir la tapa del maletero del vehículo (por ejemplo, presionando un botón de un vehículo). En algunas formas de realización, el sistema puede realizar ciertas acciones (por ejemplo, abrir automáticamente la tapa del maletero del vehículo) en este estado. En algunas formas de realización, la tapa del maletero es una tapa o cubierta configurada para cubrir o asegurar un maletero o un compartimento de almacenamiento del vehículo. En algunas formas de realización, la tapa del maletero se puede acoplar de manera operativa (por ejemplo, giratoria) al maletero de modo que la tapa del maletero se pueda operar para abrir o cerrar el maletero. En algunas formas de realización, el maletero puede utilizarse para almacenar cascos, guantes u otros engranajes para operar el vehículo. Por lo tanto, esta disposición de apertura automática de la tapa del maletero
proporciona una manera más fácil (por ejemplo, sin operaciones adicionales como por ejemplo girar una llave o presionar un botón) para que los usuarios accedan a los cascos (u otros elementos almacenados en el maletero) antes de conducir el vehículo.
En algunas formas de realización, cuando el vehículo se cambia al estado "Encendido Automático de Proximidad", se enciende la fuente de alimentación de la batería principal del vehículo (por ejemplo, enviando, desde un procesador del vehículo, una señal de activación a la batería o a una unidad de administración de energía acoplada a la batería). En algunas formas de realización, la fuente de alimentación de la batería principal puede limitarse a ciertos componentes únicamente, como por ejemplo luces indicadoras (por ejemplo, para parpadear). En este caso, el usuario del vehículo no tiene acceso a todas las funciones del vehículo.
Una vez que se enciende la alimentación del vehículo, el vehículo pasa al estado "desbloqueado" (por ejemplo, alimentación de la batería encendida). En esta fase, el sistema enciende un tablero del vehículo con el que el usuario puede controlar el vehículo a través de una interfaz de usuario en el mismo. Una vez que se cumple(n) cierto(s) criterio(s) (por ejemplo, pasar una autenticación de usuario, una acción del usuario de operar un componente del vehículo de una manera predeterminada, como por ejemplo sostener una palanca de freno y presionar un botón de inicio, etc.), el sistema permite que el usuario pueda encender el motor del vehículo y el vehículo entra en el estado "listo para operar", en el que el usuario puede conducir o montar el vehículo.
Cuando un usuario detiene un vehículo y a continuación apaga el motor, se activa un proceso de bloqueo automático. A continuación, el vehículo pasa del estado "listo para funcionar" al estado "desbloqueado". En algunas formas de realización, el sistema puede pasar el vehículo al estado "desbloqueado" después de que se apague el motor. En algunas formas de realización, cuando el sistema detecta que los dispositivos móviles del usuario se alejan del vehículo, el sistema puede mover el vehículo al estado "bloqueado". Más en particular, en la etapa "desbloqueada", el sistema sigue monitoreando las ubicaciones del dispositivo móvil del usuario detectado. Una vez que el sistema determina que el dispositivo móvil del usuario está fuera de alcance, el sistema puede bloquear el vehículo (por ejemplo, pasarlo al estado "bloqueado").
En algunas formas de realización, el sistema puede utilizar umbrales o zonas de distancia para determinar el estado de un vehículo. Por ejemplo, el sistema puede tener un umbral de "distancia lejana" (por ejemplo, un límite externo) y un umbral de "distancia cercana" (por ejemplo, un límite interno). Cuando el sistema determina que el dispositivo móvil de un usuario está en una zona dentro del umbral de "distancia cercana", el sistema puede configurar el vehículo en el estado de "Encendido Automático de Proximidad". Cuando el sistema determina que el dispositivo móvil del usuario está dentro del umbral de "distancia cercana" desde el vehículo, el sistema puede configurar el vehículo en el estado "desbloqueado". De manera similar, cuando el sistema determina que el dispositivo móvil del usuario está lejos del vehículo más allá del umbral de "distancia lejana", el sistema puede establecer el vehículo en el estado "bloqueado". En algunas formas de realización, el sistema puede utilizar umbrales basados en otras características, como por ejemplo la intensidad de la señal, etc.
En algunas formas de realización, los umbrales de "distancia lejana" y "distancia cercana" son umbrales de distancia diferentes. Las ventajas de tener dos umbrales diferentes incluyen que puede determinar eficazmente las intenciones del usuario con respecto a si bloquear o desbloquear el vehículo. Por ejemplo, cuando el usuario se mueve fuera del umbral de distancia lejana (por ejemplo, "lo suficientemente lejos" del vehículo), el sistema puede determinar con mayor precisión que el usuario tiene la intención de abandonar el vehículo para que el sistema pueda bloquear el vehículo. De manera similar, cuando el usuario se mueve dentro del umbral de distancia cercana (por ejemplo, lo suficientemente "cerca" del vehículo), el sistema puede determinar con mayor precisión que el usuario tiene la intención de operar el vehículo para que el sistema pueda desbloquear el vehículo. En algunas formas de realización, para mejorar aún más la precisión de la determinación, el presente sistema puede utilizar las trayectorias móviles del usuario para apoyar la determinación. En algunas formas de realización, según el uso práctico o la preferencia del usuario, los umbrales de "distancia lejana" y "distancia cercana" se pueden establecer cerca (o incluso superponerse) entre sí. Sin embargo, dichas formas de realización no contradicen la idea de tener dos umbrales diferentes para bloquear y desbloquear el vehículo en la presente tecnología.
En algunas formas de realización, cuando un vehículo se encuentra en el estado de "Encendido Automático de Proximidad", el sistema puede proporcionar un cierto período de tiempo para que un usuario realice una acción para mover el vehículo al estado "desbloqueado". Por ejemplo, después de que el vehículo entre en el estado de “Encendido Automático de Proximidad", el sistema puede proporcionar un período de tiempo (por ejemplo, una ventana de 5 minutos) para que un usuario presione un botón" GO "que se muestra en el dispositivo móvil del usuario con el fin de confirmar que se configura el vehículo en el estado "desbloqueado" (por ejemplo, encender la batería principal). En algunas formas de realización, si el usuario no confirma o no responde dentro del período de tiempo, el sistema puede devolver el vehículo al estado "bloqueado". Si el sistema más tarde (por ejemplo, 1 minuto después de que el vehículo está bloqueado) detecta que el dispositivo móvil se mueve nuevamente hacia el vehículo, puede configurar nuevamente el vehículo en el estado de "Encendido Automático de Proximidad". En algunas formas de realización, el vehículo puede enviar una notificación al usuario (por ejemplo, enviando señales inalámbricas al dispositivo móvil y la notificación puede mostrarse mediante una aplicación o un mecanismo de notificación (por ejemplo, una luz, un altavoz, etc.) en el dispositivo móvil) con respecto al cambio
de estado (por ejemplo, el vehículo ha pasado del estadode "Encendido Automático de Proximidad" al estado "bloqueado"). En algunas formas de realización, después de cambiar el estado del vehículo del estado de "Encendido Automático de Proximidad" al estado "bloqueado", el sistema puede verificar nuevamente la ubicación del dispositivo móvil (por ejemplo, después de 35 segundos). Si el dispositivo móvil parece permanecer cerca del vehículo, el sistema permitirá al usuario abrir un maletero del vehículo presionando una tecla de función del vehículo (por ejemplo, una llave o botón colocado / dispuesto junto a la barra del manillar del vehículo) en caso de que el usuario haya dejado accidentalmente el dispositivo móvil en el maletero.
Sin embargo, en algunas formas de realización, cuando un vehículo está en el estado "desbloqueado", por motivos de seguridad, el sistema no proporciona dicha ventana de tiempo antes de que el sistema pase el vehículo al estado "bloqueado". En algunas formas de realización, cuando un vehículo está en el estado "desbloqueado", el sistema solo proporciona una ventana de tiempo corta (por ejemplo, 1-5 segundos) antes de que el sistema pase el vehículo al estado "bloqueado". En algunas formas de realización, el estado "desbloqueado" se puede denominar como un estado de "Apagado Automático de Proximidad", lo que significa que cuando el vehículo está en el estado "desbloqueado" y el sistema determina que el dispositivo móvil está lejos del "umbral de distancia alejada", el sistema puede mover el vehículo al estado" bloqueado".
En algunas formas de realización, las señales recibidas de los dispositivos móviles del usuario pueden incluir señales de Bluetooth y / u otras señales de comunicación inalámbrica adecuadas. En algunas formas de realización, el sistema analiza la fuerza o las características de las señales recibidas (o información relacionada con la intensidad o las características de la conexión entre el dispositivo móvil del usuario y el sistema, como por ejemplo la información del indicador de potencia de la señal recibida (RSSI) en una señal Bluetooth, o el tiempo de ida y vuelta estimado / calculado de las señales), o información codificada (por ejemplo, información de ubicación GPS) en las señales y a continuación determina las ubicaciones y / o trayectorias en movimiento de los dispositivos móviles del usuario. En algunas formas de realización, el dispositivo móvil del usuario incluye un teléfono inteligente, un dispositivo portátil, un controlador sin llave u otros dispositivos adecuados.
En algunas formas de realización, el sistema puede utilizar uno o más filtros para procesar las señales o la información recibida del dispositivo móvil del usuario. Por ejemplo, el sistema puede utilizar un filtro de paso bajo, un filtro de paso alto, un filtro de media, un filtro de estimación cuadrática lineal o de Kalman (lQe ) y una combinación de los anteriores para filtrar señales no fiables (por ejemplo, ruido). En algunas formas de realización, la información correspondiente a la distancia podría derivarse directamente (por ejemplo, a partir de la información de distancia proporcionada por el protocolo de comunicación Bluetooth 5.0). En algunas formas de realización, la información de RSSI en una conexión Bluetooth entre el dispositivo móvil del usuario y el sistema puede utilizarse para determinar la intensidad de la señal. El sistema / vehículo puede recibir de forma continuada información RSSI cuando el vehículo está en el estado de "Encendido Automático de Proximidad" o en el estado de "Apagado Automático de Proximidad". Dado que la información de RSSI se ve fuertemente afectada por las condiciones ambientales (por ejemplo, el clima, las condiciones de movimiento, los obstáculos intermedios), los filtros mencionados anteriormente se pueden utilizar para suavizar las curvas de variación RSSI, a fin de reducir la interferencia / efecto de los entornos. Por ejemplo, un módulo BLE (Bluetooth de Baja Energía) del vehículo puede realizar un filtrado (por ejemplo, un filtrado de paso bajo). Una vez que el módulo BLE recopila (o establece) 10 o 20 valores RSSI, el módulo BLE puede empaquetar los valores de RSSI filtrados en un paquete y enviarlo a un procesador (principal) del vehículo (es decir, un procesador que maneja las tareas para el sistema mencionado anteriormente). Cuando el procesador principal del vehículo recibe el paquete de los valores de RSSI filtrados, el procesador principal puede (1) descomprimir el paquete, (2) ordenar los valores RSSI de acuerdo con una secuencia de tiempo, (3) hacer otro filtrado (por ejemplo, filtrado de Kalman) a la magnitud de los valores de RSSI, y (4) realizar la determinación basada en los valores de RSSI con doble filtrado.
En algunas formas de realización, el vehículo / sistema puede utilizar información medida por un sensor (por ejemplo, un sensor giroscópico, un acelerómetro, un sensor GPS, etc.) del dispositivo móvil para estimar la posición / ubicación / movimiento del dispositivo del usuario. Por ejemplo, la información medida por un sensor giroscópico y / o un acelerómetro puede utilizarse para determinar una dirección de movimiento del dispositivo móvil. Además, la información de los sensores mencionados anteriormente del dispositivo móvil también puede ayudar al sistema a verificar si el dispositivo móvil se está moviendo o no. Dado que la intensidad de la señal de la conexión entre el dispositivo móvil y el sistema / vehículo puede verse fuertemente afectada por las condiciones ambientales, si el sistema detecta una variación en la intensidad de la señal mientras la información de los sensores del dispositivo móvil indica que el dispositivo móvil ( y también el usuario) está quieto, entonces el sistema puede determinar que el usuario no se está moviendo hacia / lejos del vehículo y la variación en la intensidad de la señal puede considerarse como ruido. En algunas formas de realización, la información medida por un sensor GPS se puede utilizar para determinar la ubicación del dispositivo móvil y el vehículo (por ejemplo, se puede rastrear y almacenar cuándo se hizo funcionar la ubicación del vehículo). Por ejemplo, la ubicación de un vehículo puede almacenarse en un servidor, un componente de memoria / almacenamiento del vehículo y / o un dispositivo móvil.
Además de la información del sensor o sensores del dispositivo móvil, en algunas formas de realización, el vehículo / sistema también puede utilizar otra información para respaldar su detección / determinación de la intensidad de la señal y / o distancia (por ejemplo, para mejorar la precisión). Por ejemplo, el vehículo puede incluir radar (es), Lidar (s) o una cámara panorámica (o una pluralidad de cámaras que se pueden combinar para tener un efecto panorámico) que puede recopilar información adicional (por ejemplo, información de distancia del radar / Lidars, o detección / seguimiento de objetos basado en imágenes fijas / en movimiento generadas por la cámara) como información complementaria para respaldar la detección / determinación del sistema sobre la variación de la intensidad de la señal.
En algunas otras formas de realización, el vehículo puede incluir más de un transceptor inalámbricos, por ejemplo, dos transceptores Bluetooth o Bluetooth de baja energía (BLE) dispuestos en la parte delantera del vehículo y en la parte trasera del vehículo, respectivamente. Cada uno de estos transceptores se puede conectar de forma inalámbrica al dispositivo móvil del usuario respectivamente, por lo que el sistema puede recibir información / señales con respecto a la intensidad / distancia de la señal simultáneamente desde los transceptores. Como resultado, las características analizadas de los transceptores se pueden comparar y analizar más, la precisión de la determinación de la intensidad de la señal y / o la distancia se puede mejorar y las trayectorias reales del dispositivo móvil del usuario se pueden identificar más claramente.
En algunas formas de realización, la presente tecnología se puede implementar como un mecanismo de seguridad complementario además de un sistema de autenticación tradicional (por ejemplo, utilizando llaves físicas o llaveros inalámbricos) en el vehículo. En algunas formas de realización, la presente tecnología se puede implementar como un sistema autónomo que se puede instalar en un vehículo. En algunas formas de realización, la presente tecnología se puede implementar como parte de un sistema de control de vehículo.
La Figura 1A es un diagrama esquemático que ilustra un sistema 100 de acuerdo con formas de realización de la tecnología descrita. Tal como se muestra, el sistema 100 incluye un vehículo 101 y un dispositivo móvil 103 que lleva el usuario 10 o un dispositivo móvil 105 que lleva el usuario 12. En algunas formas de realización, el vehículo 101 puede incluir un vehículo eléctrico, un scooter eléctrico, un vehículo híbrido u otros vehículos adecuados (por ejemplo, vehículos que tienen múltiples estados de suministro de energía tal como se muestra en la Figura 3A o 3B, o vehículos que pueden ser alimentados por una o más baterías u otros dispositivos de almacenamiento de energía, como por ejemplo condensadores, células, etc.). En algunas formas de realización, el dispositivo móvil 103 o 105 puede incluir un teléfono inteligente, una tableta, una computadora portátil, un dispositivo portátil, un controlador portátil y / u otros dispositivos adecuados. El vehículo 101 incluye un procesador 1013 y un dispositivo de medición de distancia 1011 (por ejemplo, un módulo inalámbrico como por ejemplo un dispositivo / módulo de comunicación Bluetooth o componentes con funciones similares) configurado para monitorear / buscar constantemente señales asociadas con las ubicaciones del dispositivo móvil 103 o 105 (por ejemplo, desde el dispositivo móvil 103 o 105). En algunas formas de realización, el vehículo 101 puede incluir uno o más componentes de entrada / salida (I / O) configurados para recibir o presentar información asociada con el vehículo 101. En algunas formas de realización, el componente de I / O puede incluir una pantalla táctil, un botón físico, un botón virtual en una pantalla, un teclado, una palanca (por ejemplo, una palanca de freno) u otros componentes adecuados equipados en el vehículo.
En algunas formas de realización, un método para controlar el vehículo 101 de acuerdo con la presente tecnología puede incluir, por ejemplo, (1) recibir una señal inalámbrica desde el dispositivo móvil 103 o 105; y (2) analizar al menos una característica de la señal inalámbrica para determinar una ubicación actual del dispositivo móvil 103 o 105. El método puede incluir además desbloquear el vehículo 101 en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil 103 o 105 está dentro de un límite interno 111 adyacente al vehículo 101, y que se recibe una primera señal de un primera componente de entrada / salida (I / O) (por ejemplo, un botón "GO", un botón "Inicio" y / o una palanca de freno) del vehículo 101. En algunas formas de realización, el método puede incluir además bloquear el vehículo 101 en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil 103 o 105 es externo a un límite externo 109 que es externo al límite interno.
Tal como se muestra en la Figura 1A, el sistema puede definir cuatro zonas (Z0, Z1 , Z2 y Z3 ) por un límite de señal 107, el límite externo (o umbral lejano) 109 y el límite interno (o umbral cercano) 111. En las formas de realización ilustradas, el límite de señal 107, el límite externo 109 y el límite interno 111 son círculos concéntricos, y el centro de estos círculos concéntricos es el vehículo 101. En otras formas de realización, sin embargo, el límite de señal 107, el límite externo 109 y el límite interno 111 pueden tener diferentes formas (por ejemplo, formas de realización que se describirán con referencia a las Figuras 2B y 2C). En algunas formas de realización, el límite interno 111 y el límite externo 109 pueden determinarse o personalizarse en función de varios factores como, por ejemplo, los tipos de vehículos, los tipos de componentes de comunicación utilizados por el vehículo 101 y el dispositivo móvil 103 o 105, una configuración de usuario (por ejemplo, un usuario puede determinar estos límites basándose en los hábitos del usuario o las formas de operar el vehículo 101 a través del tablero de instrumentos del vehículo 101 o el dispositivo móvil 103 o 105), etc.
Tal como se muestra en la Figura 1A, la Zona Z0 se define como un área fuera del límite de la señal 107. El límite de la señal 107 se determina basándose en si el vehículo 101 puede recibir adecuadamente una señal del
dispositivo móvil 103 o 105 y establecer una conexión inalámbrica de ese modo. Cuando el dispositivo móvil 103 o 105 está dentro del límite de la señal 107, el vehículo 101 puede recibir señales del mismo. Cuando el dispositivo móvil 103 o 105 no está dentro del límite de la señal 107, el vehículo 101 no puede recibir correctamente una señal inalámbrica desde el dispositivo móvil 103 o 105. En otras palabras, en algunas formas de realización, el límite de señal 107 puede ser un límite externo del límite externo 109. En algunas formas de realización, además del requisito de distancia (por ejemplo, dentro del límite de la señal 107), la conexión inalámbrica puede requerir un proceso de autenticación entre el vehículo 101 y el dispositivo móvil 103 o 105 al establecer la conexión inalámbrica. La zona Z1 se define como un área entre el límite de señal 107 y el límite externo 109. La zona Z2 se define como un área entre el límite externo 109 y el límite interno 111. La zona Z3 se define como un área dentro del límite interno 101. En algunas formas de realización, el dispositivo móvil 103 o 105 puede incluir un componente de comunicación inalámbrica activa (por ejemplo, un componente de Bluetooth) configurado para emitir señales de modo que el vehículo 101 pueda determinar la ubicación del dispositivo móvil 103 o 105 recibiendo las señales o analizando las señales. En algunas formas de realización, el componente de comunicación inalámbrica activo puede controlarse mediante una aplicación (por ejemplo, una aplicación para controlar, operar y / o comunicarse con el vehículo 101) instalada en el dispositivo móvil 103 o 105. Por ejemplo, cuando se inicia la aplicación, la aplicación puede dar instrucciones al componente de comunicación inalámbrica activo para que mida la ubicación del dispositivo móvil 103 o 105. En algunas formas de realización, el componente de comunicación inalámbrica activa del dispositivo móvil 103 o 105 puede ser un emisor que envía señales de ubicación (por ejemplo, señales de GPS) al vehículo 101.
El sistema 100 puede bloquear o desbloquear el vehículo 101 durante un proceso de desbloqueo UP (Figura 1B) o un proceso de bloqueo Lp (Figura 1C). Durante el proceso de desbloqueo, tal como se muestra en las Figuras 1A y 1B, el dispositivo móvil 103 que lleva el usuario 10 se mueve hacia el vehículo 101 desde la Zona Z0 a la Zona Z3. En la Zona Z0, el dispositivo móvil 103 no está conectado al vehículo 101.
En algunas formas de realización, cuando el dispositivo móvil 103 entra en la Zona Z1 desde la Zona Z0 , el sistema 100 puede comenzar a establecer una comunicación entre el dispositivo móvil 103 y el vehículo 101 (por ejemplo, el vehículo 101 recibe periódicamente señales inalámbricas del dispositivo móvil 103 y realiza comprobaciones con el dispositivo móvil 103 para ver si todavía está en la Zona Z1 ). Cuando el dispositivo móvil 103 entra en la Zona Z2 desde la Zona Z1 , el dispositivo de medición de distancia 1011 comienza / sigue monitoreando las ubicaciones del dispositivo móvil 103 cuando está en la Zona Z2 (por ejemplo, el sistema 100 realiza comprobaciones con el dispositivo móvil 103 frecuentemente para ver si todavía está en la Zona Z2 ). Cuando el procesador 1013 del vehículo 101 detecta que el dispositivo móvil 103 entra en la Zona Z3 desde la Zona Z2 a través de la monitorización desde el dispositivo de medición de distancia 1011, el procesador 1013 puede activar una función de “Encendido Automático de Proximidad” del vehículo 101. En algunas formas de realización, en respuesta a la entrada de la Zona Z3 , el sistema 101 puede generar una indicación de esa entrada (por ejemplo, un parpadeo de luz, un sonido, etc.).
En algunas formas de realización, la función de “Encendido Automático de Proximidad” puede ser realizada por el procesador 1013 (por ejemplo, un motor o unidad de control eléctrico, ECU) del vehículo 101. En algunas formas de realización, la función "Encendido Automático de Proximidad" se puede realizar mediante un dispositivo separado (o un circuito, lógica de control, etc.) acoplado al procesador 1013. La función de "Encendido Automático de Proximidad" está diseñada para desbloquear automáticamente el vehículo 101 (por ejemplo, encender su alimentación proporcionada por una batería) basándose en las ubicaciones / trayectorias del dispositivo móvil 103. Una vez que se activa la función de "Encendido Automático de Proximidad", el dispositivo de medición de distancia 1011 sigue monitoreando la ubicación del dispositivo móvil 103.
Cuando la función de "Encendido Automático de Proximidad" está activada, la alimentación de la batería del vehículo (por ejemplo, la batería principal mencionada anteriormente) y el motor permanecen apagados. En esta etapa, el dispositivo de medición de distancia 1011 sigue monitoreando las ubicaciones del dispositivo móvil 103. En algunas formas de realización, el dispositivo de medición de distancia 1011 puede transmitir la información de ubicación del dispositivo móvil 103 y a continuación el procesador 1013 puede detectar que el dispositivo móvil 103 entra en la Zona Z3. En algunas formas de realización, el dispositivo de medición de distancia 1011 puede detectar que el dispositivo móvil 103 entra en la Zona Z3 y lo notifica al procesador 1013 del vehículo 101. A continuación, el procesador 1013 del vehículo 101 "desbloquea" el vehículo encendiendo la alimentación del vehículo (por ejemplo, proporcionada por una batería). Una vez que se enciende la alimentación del vehículo, se enciende un tablero del vehículo 101 de manera que el usuario 10 puede controlar el vehículo 101 a través de una interfaz de usuario mostrada en el tablero. El usuario 10 puede entonces encender un motor del vehículo 101 para hacer funcionar el mismo. En algunas formas de realización, cuando el procesador 1013 determina que el dispositivo móvil 103 ha entrado en la Zona Z3 , el procesador 1013 puede desbloquear el vehículo 101 si el procesador 1013 recibe una o más señales de los componentes de entrada / salida (I / O) del vehículo. En algunas formas de realización, las señales se generan en respuesta a operaciones del usuario como por ejemplo presionar un botón "GO" o un botón “inicio”, sujetar una palanca de freno, una combinación de los mismos y / u otras operaciones adecuadas.
En las formas de realización en las que se van a recibir dos o más señales, el usuario 10 puede establecer un orden para recibir estas señales. Por ejemplo, el usuario 10 puede decidir utilizar dos señales (primera y segunda señal) como "confirmación" para arrancar el motor. La primera señal puede ser en respuesta a presionar un botón (por ejemplo, un botón "GO" o un botón de “Inicio”), y la segunda señal puede responder al tirar de o sostener una palanca de freno. En algunas formas de realización, la primera y la segunda señal pueden ser ambas en respuesta a presionar el botón o al tirar o sostener la palanca del freno.
En algunas formas de realización, cuando el dispositivo móvil 103 entra en la Zona Z1 desde la Zona Z0 , el dispositivo de medición de distancia 1011 puede proporcionar información (por ejemplo, la intensidad de la señal o información de ubicación) del dispositivo móvil 103 de modo que el procesador 1013 puede detectar la entrada y generar en consecuencia una confirmación audible o visual de la entrada (por ejemplo, un parpadeo de luz, un sonido, etc.). En dichas formas de realización, el dispositivo de medición de distancia 1011 sigue monitoreando las ubicaciones del dispositivo móvil cuando está en la Zona Z1. Cuando el procesador 1013 detecta que el dispositivo móvil 103 entra en la Zona Z2 , puede notificar al sistema 100 que active una función de "Encendido automático de proximidad". Una vez que se activa la función de "Encendido Automático de Proximidad", el dispositivo de medición de distancia 1011 sigue monitoreando la ubicación del dispositivo móvil 103 (tanto en la Zona Z2 como en la Zona Z3 ). Cuando se activa la función de "Encendido Automático de Proximidad", la alimentación de la batería del vehículo (por ejemplo, la batería principal mencionada anteriormente) y el motor permanecen apagados. En esta etapa, el dispositivo de medición de distancia 1011 sigue monitoreando las ubicaciones del dispositivo móvil 103. Cuando el procesador 1013 detecta que el dispositivo móvil 103 entra en la Zona Z3 , notifica el proceso del vehículo 101. El procesador 1013 del vehículo 101 puede entonces "desbloquear" el vehículo encendiendo la alimentación del vehículo (por ejemplo, proporcionada por una batería u otra (s) fuente (s) de alimentación en el vehículo). Una vez que se activa la alimentación del vehículo, se enciende un tablero del vehículo 101 de manera que el usuario 10 puede controlar el vehículo 101 a través de una interfaz de usuario mostrada en el tablero. El usuario 10 puede entonces encender un motor del vehículo 101 para hacer funcionar el mismo.
La Figura 1B ilustra un proceso de desbloqueo (UP) de acuerdo con formas de realización de la tecnología descrita. En la Figura 1B, las Zonas Z0 - Z2 de la Figura 1A se pueden combinar y nombrar conjuntamente como Zona Z4. Tal como se muestra en la Figura 1B, en algunas formas de realización, cuando el dispositivo móvil 103 se mueve a través del límite interno 111 hacia el vehículo 101 (es decir, se mueve de la Zona Z4 a la Zona Z3 ), se activa la función de "Encendido Automático de Proximidad". Cuando se activa la función de "Encendido Automático de Proximidad", la energía de la batería del vehículo (por ejemplo, la batería principal mencionada anteriormente) y el motor permanecen apagados. En algunas formas de realización, un botón (por ejemplo, un botón físico, un botón visual, un botón "GO", etc.) del vehículo puede ser activado o alimentado por una batería del vehículo. En algunas formas de realización, el usuario 10 puede a continuación presionar el botón para "encender" el vehículo (por ejemplo, proporcionar alimentación eléctrica a múltiples componentes del vehículo, como por ejemplo monitor, pantalla, radio, etc.). En este estado de "encendido" (o estado de "desbloqueo"), el motor permanece apagado. En algunas formas de realización, el usuario 10 puede entonces volver a presionar el botón para arrancar el motor. En algunas formas de realización, el usuario 10 puede sujetar primero una palanca de freno del vehículo (o presionar otro botón, en otras formas de realización) y a continuación presionar el botón para arrancar el motor. En algunas formas de realización, el usuario 10 puede sostener una palanca de freno del vehículo 101 y presionar el botón al mismo tiempo para arrancar el motor. En algunas formas de realización, el usuario 10 puede personalizar la forma de arrancar el motor (por ejemplo, tirar de la palanca del freno tres veces y a continuación presionar el botón) para mejorar la seguridad del vehículo y / o la flexibilidad para controlar el vehículo 101.
En algunas formas de realización, cuando el dispositivo móvil 103 está dentro de un límite interno 111 (es decir, en la Zona Z3 ), se activa un temporizador. El temporizador está configurado para proporcionar al usuario 10 un período de tiempo (por ejemplo, 5 minutos) para arrancar el motor del vehículo 101. Si el usuario no arranca el motor durante el período de tiempo, el sistema 100 puede entonces bloquear el vehículo 101 (por ejemplo, apagar la alimentación de la batería). Por ejemplo, en algunas formas de realización, el botón se puede inhabilitar (por ejemplo, apagar) de modo que el usuario 10 ya no pueda presionar el botón para arrancar el motor. Esto puede ahorrar energía de la batería del vehículo y mejorar la seguridad del vehículo.
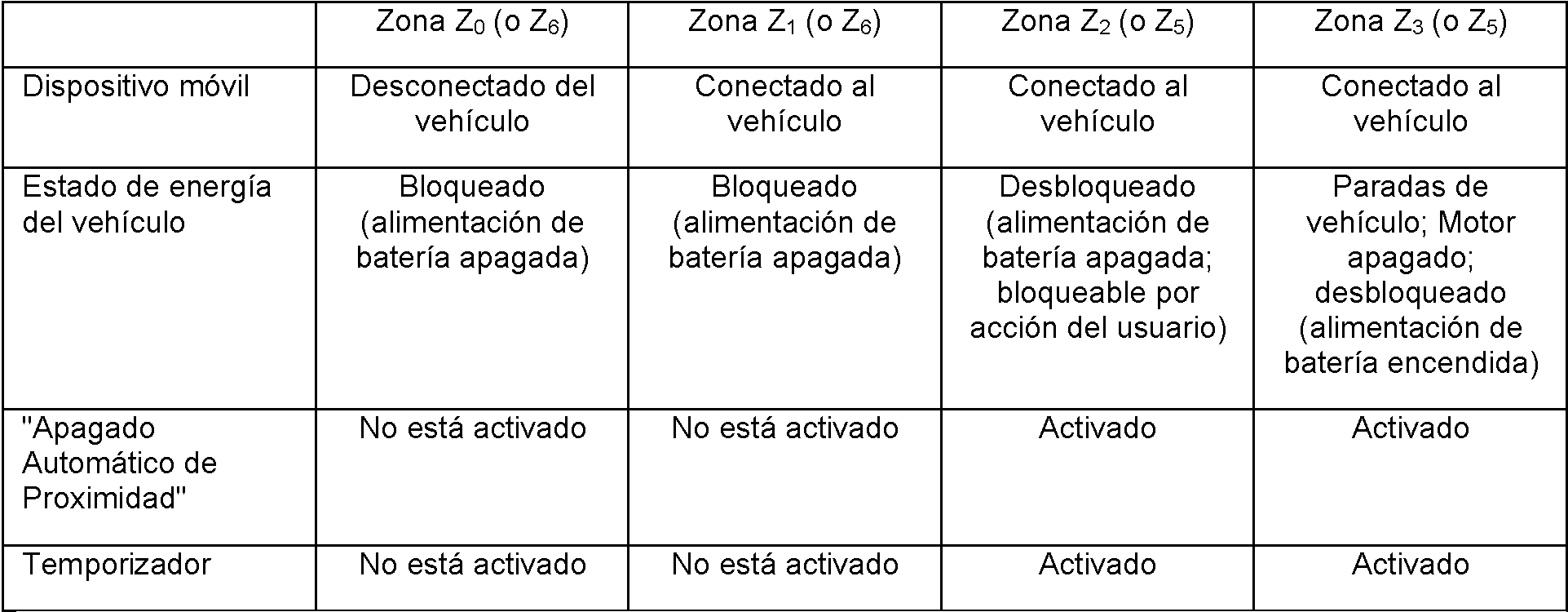
En algunas formas de realización, si el sistema 100 determina que el dispositivo móvil 103 permanece en la Zona Z3 , puede verificar periódicamente (por ejemplo, cada 35 segundos) con el usuario 10 enviando una notificación para ver si el usuario 10 todavía quiere mantener la función de "Encendido Automático de Proximidad" activada. Si es así, el sistema 100 puede desbloquear el vehículo 101 tal como se ha descrito anteriormente. Si no es así (por ejemplo, si no hay más operaciones del usuario 10 a través de una aplicación instalada en el dispositivo móvil 103 o componentes de I / O en el vehículo), el sistema 100 puede desactivar la función de "Encendido Automático de Proximidad". En algunas formas de realización, el presente sistema 100 permite al usuario 10 configurar el tiempo y la ubicación con respecto a cuándo activar la función de “Encendido Automático de Proximidad”. La Tabla 1 a continuación resume los estados y acciones en diferentes zonas descritas en las Figuras 1A y 1B durante el proceso de desbloqueo de acuerdo con formas de realización de la presente descripción.
Tabla 1: Proceso de desbloqueo

La Figura 1C ilustra un proceso de bloqueo de acuerdo con formas de realización de la presente tecnología. En la Figura 1C, las Zonas Z2 y Z3 en la Figura 1A se pueden combinar y nombrar conjuntamente como Zona Z5 , y las zonas Z0 y Z1 en la Figura 1A se pueden combinar y nombrar conjuntamente como Zona Z6. Tal como se muestra en la Figura 1C, cuando un usuario 12 detiene un vehículo y apaga el motor del vehículo, se activa el proceso de bloqueo automático. El procesador 1013 activa entonces una función de apagado automático de proximidad e indica al dispositivo 1011 de medición de distancia que controle la ubicación del dispositivo móvil 105. En algunas formas de realización, cuando el procesador 1013 detecta que el dispositivo móvil 105 que lleva el usuario 12 se aleja de la Zona Z5 a la Zona Z6 (es decir, a través del límite externo 109 y se aleja del vehículo 101), el procesador 1013 puede realizar la función de "Apagado Automático de Proximidad" para apagar la alimentación del vehículo 101.
En algunas formas de realización, si el usuario 12 desea encender la alimentación de la batería del vehículo 101, el usuario 12 aún puede hacerlo enviando instrucciones al vehículo 101 mediante el dispositivo móvil 105 (por ejemplo, presionando un botón de "bloqueo" mostrado en una interfaz de usuario de la aplicación instalada en el dispositivo móvil 105). En las formas de realización ilustradas, el vehículo 101 permanece desbloqueado. Cuando el vehículo 101 está bloqueado, el usuario 12 no puede controlar completamente el vehículo 101, por ejemplo, encendiendo directamente el motor, mediante el dispositivo móvil 105 o los componentes de I / O del vehículo 101. Cuando el vehículo 101 está desbloqueado, el usuario 12 puede controlar completamente el vehículo 101 mediante el dispositivo móvil 105, incluido el encendido del motor (por ejemplo, presionando un botón "GO", tal como se ha descrito anteriormente con referencia a la Figura 1B). En algunas formas de realización, sin embargo, el vehículo 101 se puede bloquear mediante la función de "Apagado Automático de Proximidad" cuando el dispositivo de medición de distancia 1011 o el procesador 1013 detecta que el dispositivo móvil 105 que lleva el usuario 12 se aleja de la Zona Z5 a la Zona Z6 (es decir, a través del límite externo 109). En algunas formas de realización, cuando el procesador 1013 detecta que el dispositivo móvil 105 que lleva el usuario 12 se aleja de la Zona Z5 a la Zona Z6 , el procesador 1013 puede realizar la función de "Apagado automático de proximidad" para apagar la alimentación de la batería del vehículo 101 y bloquear el vehículo 101. En algunas formas de realización, haciendo referencia de nuevo a la Figura 1A, cuando el procesador 1013 detecta que el dispositivo móvil 105 se mueve de la Zona Z2 a la Zona Z1 , si la alimentación de la batería todavía está encendida, el procesador 1013 del vehículo 101 apagará la alimentación de la batería y bloqueará el vehículo 101. El sistema 100 también desactivará la función de "Apagado Automático de Proximidad".
En algunas formas de realización, el sistema 100 puede proporcionar un margen de tiempo (por ejemplo, 1-5 segundos; contado por un temporizador del procesador 1013 o del vehículo 101) antes de que apague la alimentación de la batería del vehículo 101. El margen de tiempo puede ser configurado por un usuario (por ejemplo, usuario 10 o 12). En algunas formas de realización, el temporizador puede utilizarse para rastrear cuánto tiempo ha estado el dispositivo móvil 105 en la Zona Z2 o Zona Z3 para determinar si el usuario se aleja del vehículo 101 (en ese caso, el vehículo 101 puede bloquearse por motivos de seguridad) o el usuario simplemente se mueve en la Zona Z2 o la Zona Z3 sin intención de abandonar el vehículo 101 (en ese caso, el vehículo 101 permanece desbloqueado). La Tabla 2 a continuación resume los estados y acciones en diferentes zonas descritas en las Figuras 1A y 1C durante el proceso de bloqueo de acuerdo con formas de realización de la presente descripción.
Tabla 2: Proceso de Bloqueo
En algunas formas de realización, el sistema 100 permite a un usuario configurar varias "respuestas" del vehículo 101 en varias zonas. Por ejemplo, puede haber más zonas (por ejemplo, más de 4 zonas) que las descritas en las formas de realización anteriores. Por ejemplo, en algunas formas de realización, un usuario puede tener cinco zonas (por ejemplo, Zona A0-A4 , en la dirección hacia el vehículo 101). Por ejemplo, en la Zona A0 , el sistema 100 puede comenzar a establecer una conexión con un dispositivo móvil. En la Zona A1 , el sistema 100 puede monitorear periódicamente la ubicación del dispositivo móvil. En la Zona A2 , el sistema 100 puede seguir monitoreando la ubicación del dispositivo móvil (por ejemplo, con más frecuencia que en la Zona A1 ). Cuando el sistema 100 detecta que el dispositivo móvil entra en la Zona A3 desde la Zona A2 , el sistema 100 puede indicar al vehículo 101 que envíe una notificación sonora (por ejemplo, reproducir un sonido, una canción o una melodía) hacia el dispositivo móvil. Cuando el sistema 100 detecta que el dispositivo móvil entra en la Zona A4 desde la Zona A3 , el sistema 100 puede activar la función de "Encendido Automático de Proximidad" y encender la alimentación del vehículo 101 tal como se ha descrito anteriormente.
En algunas formas de realización, la notificación de sonido puede variar según las fechas. Por ejemplo, la notificación de sonido puede ser una canción de cumpleaños en el cumpleaños del usuario. Como otro ejemplo, la notificación de sonido puede ser una canción de felicitación en un día festivo (por ejemplo, Año Nuevo, Navidad, etc.). En algunas formas de realización, cuando el sistema 100 activa la función de "Encendido Automático de Proximidad", también puede reproducir un conjunto de sonidos o una canción desde un altavoz del vehículo 101. En algunas formas de realización, el sistema 100 puede seguir reproduciendo una canción cuando se activa la función de “Encendido Automático de Proximidad” (por ejemplo, una canción de 5 minutos de duración). En dichas formas de realización, se puede notificar al usuario 10 o 12 y, en consecuencia, tomar una acción (por ejemplo, presionar un botón "GO" para encender la alimentación del vehículo 101, o presionar un botón "GO" y sostener una palanca de freno al mismo tiempo para arrancar un motor del vehículo 101).
En algunas formas de realización, esta "respuesta" del vehículo 101 puede incluir un movimiento del vehículo 101. Por ejemplo, el vehículo 101 (por ejemplo, un vehículo de cuatro ruedas autoequilibrado, o un vehículo de tres ruedas con un mecanismo de inclinación bloqueado durante la etapa de apagado) se puede estacionar en un espacio de estacionamiento estrecho en la Zona A4. Cuando el dispositivo móvil (por ejemplo, el dispositivo móvil 103 o 105) entra en la Zona A4 (por ejemplo, donde se encuentra el vehículo 101) desde la Zona A3 , el vehículo 101 puede moverse un poco hacia el dispositivo móvil desde el espacio de estacionamiento estrecho, de modo que el usuario 10 o 12 puede acceder fácilmente al vehículo 101. En algunas formas de realización, el número de zonas se puede ajustar en base a las preferencias del usuario, las necesidades reales y / o el número de casos / respuestas durante los procesos de bloqueo / desbloqueo. En algunas formas de realización, las respuestas pueden incluir (i) proporcionar alimentación a una luz indicativa del vehículo 101, (ii) reproducir un sonido desde un altavoz del vehículo 101 y / o (iii) proporcionar alimentación a un motor del vehículo para provocar un movimiento del vehículo 101.
La Figura 2A es un diagrama esquemático (vista superior) que ilustra múltiples trayectorias T1 , T2 de un objeto móvil (por ejemplo, el dispositivo móvil 103 o 105 descrito anteriormente) asociado con un vehículo 201 de acuerdo con formas de realización de la tecnología descrita. El presente sistema puede bloquear (por ejemplo, apagar la alimentación de la batería) o desbloquear (por ejemplo, encender la alimentación de la batería) el vehículo 201 en base a trayectorias predeterminadas del objeto móvil. Por ejemplo, la trayectoria T1 indica que el objeto en movimiento se movió hacia el vehículo 201 desde la Zona Z0 a la Zona Z2 , sin entrar además en la Zona Z3. Por defecto, el sistema activará la función de "Encendido Automático de Proximidad" cuando el objeto móvil entre en la Zona Z2 o monitoreará de forma continua si el objeto móvil entra en la Zona Z3 o no para activar
la función de "Encendido Automático de Proximidad" (basada en un ajuste sobre en qué zona activar la función de "Encendido Automático de Proximidad"). Sin embargo, si el sistema determina que hubo muchas ocasiones en que el objeto móvil viajó a lo largo de la trayectoria T1 pero un usuario finalmente no encendió un motor del vehículo 201, el sistema puede ajustar en consecuencia su Zona Z2 moviendo el límite externo 109 hacia el vehículo 201 (de modo que un movimiento a lo largo de la trayectoria T1 no activará la función de “Encendido Automático de Proximidad”).
Como otro ejemplo, la trayectoria T2 indica que el objeto en movimiento se movió hacia el vehículo 201 desde la Zona Z0 a la Zona Z3 , regresó a la Zona Z2 y volvió a entrar en la Zona Z3 varias veces. De forma predeterminada, el sistema activará la función de "Encendido Automático de Proximidad" cuando el objeto móvil entre en la Zona Z2 , y a continuación encenderá la alimentación de la batería del vehículo 201 una vez que los objetos móviles entren en la Zona Z3. Sin embargo, si el sistema determina que hubo muchas ocasiones en que los objetos móviles viajaron a lo largo de las trayectorias T1 pero el usuario finalmente no encendió el motor del vehículo 201, el sistema puede ajustar en consecuencia su Zona Z3 moviendo el límite interno 111 más hacia el vehículo 201 (de manera que el sistema sólo encenderá la alimentación de la batería del vehículo 201 cuando el objeto móvil esté muy cerca del vehículo 201. Por ejemplo, en algunas formas de realización, el tamaño / forma del límite interno 111 se puede ajustar de forma dinámica.
La Figura 2B es un diagrama esquemático (vista superior) que ilustra múltiples zonas no concéntricas (Zonas Z0-3 ) asociadas con el vehículo 201 de acuerdo con formas de realización de la tecnología descrita. En las formas de realización ilustradas, las zonas pueden ser determinadas por un usuario y no es necesario que sean concéntricas. En las formas de realización ilustradas, estas zonas no concéntricas pueden configurarse para adaptarse a varios factores, como por ejemplo la diferencia de calidad de las señales desde varias direcciones (por ejemplo, el vehículo 201 puede recibir señales con mejor calidad en la dirección A que en la dirección B). En algunas formas de realización, las zonas se pueden determinar basándose en el comportamiento del usuario. Por ejemplo, un usuario a menudo se acerca al vehículo 201 en la dirección C.
La Figura 2C es un diagrama esquemático (vista superior) que ilustra múltiples zonas (Zonas Z0 -3) con varias formas asociadas con el vehículo 201 de acuerdo con formas de realización de la tecnología descrita. En las formas de realización ilustradas, por ejemplo, la Zona Z3 puede ser rectangular (por ejemplo, la forma de un espacio de estacionamiento), la Zona Z2 puede ser un cuadrado (por ejemplo, la forma de un edificio) y la Zona Z1 puede ser una elipse (por ejemplo, una forma de campus de una empresa o una zona residencial). En algunas formas de realización, las formas y tamaños de estas zonas se pueden ajustar en función de las preferencias del usuario, el comportamiento del usuario, factores ambientales, etc. En algunas formas de realización, un usuario puede ajustar el tamaño del límite interno y el límite externo a través de una aplicación instalada en el dispositivo móvil, por ejemplo, basándose en las preferencias personales del usuario. En algunas formas de realización, las formas de las zonas se pueden determinar mediante una geovalla o similar.
La Figura 3A es un diagrama esquemático que ilustra varios estados de un vehículo durante un proceso de desbloqueo automático de acuerdo con formas de realización de la tecnología descrita. En el bloque 301, el vehículo está en un estado "bloqueado", en que tanto la alimentación de la batería como el motor están apagados. Cuando el vehículo pasa a un estado de "Encendido Automático de Proximidad", en el bloque 303, la alimentación de la batería del vehículo y el motor permanecen apagados, pero se activa una función de "Encendido Automático de Proximidad" para monitorear la ubicación de un dispositivo móvil asociado con el vehículo, de modo que el sistema pueda determinar si se enciende la alimentación de la batería del vehículo (por ejemplo, "desbloquear" el vehículo). En algunas formas de realización, en el estado de "Encendido automático de Proximidad" (bloque 303), solo hay una función limitada accesible para un usuario del vehículo. Por ejemplo, solo algunos de los componentes de I / O están habilitados / encendidos, de modo que el usuario solo puede (1) desbloquear el vehículo presionando un botón de inicio (por ejemplo, un botón "GO") o (2) abrir un maletero del vehículo pulsando otra tecla o botón de función. En el bloque 305, el vehículo se mueve a un estado "desbloqueado", en que la alimentación de la batería está encendida pero su motor todavía está apagado. El vehículo se puede "desbloquear" (por ejemplo, del bloque 303 al bloque 305) mediante la función de "Encendido Automático de Proximidad", en respuesta a la detección de un movimiento o cambio de ubicación del dispositivo móvil asociado con el vehículo y / o al recibir una señal de desbloqueo enviada desde un dispositivo móvil autenticado o un llavero. Cuando el usuario arranca el motor, el estado del vehículo pasa de "desbloqueado" en el bloque 305 a "listo para funcionar" en el bloque 307.
La Figura 3B es un diagrama esquemático que ilustra varios estados de un vehículo durante un proceso de bloqueo automático de acuerdo con formas de realización de la tecnología descrita. En el bloque 309, un usuario detiene el vehículo, pero su motor permanece encendido. Después de que el usuario apaga el motor, el estado del vehículo pasa a "desbloqueado" en el bloque 305. Cuando el estado del vehículo pasa a "desbloqueado" desde el bloque 309, el sistema activa una función de "Apagado Automático de Proximidad" para monitorear la ubicación de un dispositivo móvil asociado con el vehículo, a fin de determinar cuándo apagar la alimentación de la batería del vehículo (por ejemplo, bloquear el vehículo). El vehículo se puede "bloquear" (por ejemplo, del bloque 305 al bloque 301) mediante la función de "Apagado Automático de Proximidad", en respuesta a una detección de un movimiento o cambio de ubicación del dispositivo móvil asociado con el vehículo, mostrando que
el usuario se aleja del vehículo. Cuando el vehículo está "bloqueado" en el bloque 301, la alimentación de la batería y el motor se apagan. En algunas formas de realización, cuando el usuario apaga el motor, el sistema puede omitir el estado desbloqueado (bloque 305) y establecer directamente el estado del vehículo desde el estado "motor encendido" (correspondiente al bloque 309) al estado "bloqueado" (bloque 301).
La Figura 4 es un diagrama esquemático que ilustra un sistema 400 de acuerdo con formas de realización de la tecnología descrita que puede referirse al sistema 100 en la Figura 1A. Tal como se muestra, el sistema 400 incluye un vehículo eléctrico 41 y un dispositivo móvil 43. En algunas formas de realización, el dispositivo móvil 43 puede incluir un teléfono inteligente, una tableta, un reloj inteligente, un ordenador portátil, otro tipo de dispositivo informático, etc. En algunas formas de realización, el dispositivo móvil 43 también puede ser un llavero inalámbrico con capacidad de transmisión de señal inalámbrica activa o similar. En algunas formas de realización, el vehículo eléctrico 41 puede ser un scooter eléctrico u otros vehículos con mecanismos de seguridad. En algunas formas de realización, el vehículo eléctrico 41 puede comunicarse con el dispositivo móvil 43 a través de una conexión inalámbrica directa o una red inalámbrica (por ejemplo, Bluetooth, infrarrojos, Wi-Fi, 3G / 4G / 5G, etc.). El dispositivo móvil 43 y / o el vehículo eléctrico 41 pueden comunicarse además con un servidor 45 (por ejemplo, actualizar su ubicación). En algunas formas de realización, la red de comunicación inalámbrica entre el dispositivo móvil 43 y el servidor 45 puede ser diferente de la red de comunicación inalámbrica o la conexión inalámbrica directa entre el vehículo eléctrico 41 y el servidor 45.
En algunas formas de realización, el dispositivo móvil 43 está configurado con una aplicación (por ejemplo, una app) que indica al procesador del dispositivo móvil que se comunique con un procesador 409 del vehículo eléctrico 41 a través de un enlace de comunicación inalámbrica. En algunas formas de realización, la aplicación utiliza un protocolo de comunicación inalámbrica Bluetooth para comunicarse con un receptor emparejado en el vehículo eléctrico 41. El protocolo Bluetooth establece un enlace de comunicación siempre que los dispositivos emparejados están dentro del alcance. Por lo tanto, el receptor del vehículo eléctrico 41 puede utilizar una intensidad de señal recibida de la señal de Bluetooth como indicador de lo cerca que se encuentra el dispositivo móvil del vehículo (por ejemplo, el RSSI). Una vez que el dispositivo móvil está dentro de un radio deseado, un usuario puede activar el vehículo eléctrico 41 (presionando un comando "GO" en un tablero) sin requerir ninguna entrada de clave adicional del usuario.
De manera similar, para bloquear el vehículo eléctrico 41, la intensidad de la señal recibida de las señales de comunicación Bluetooth indica cuando el usuario se ha alejado del vehículo eléctrico 41 y puede apagar el vehículo si la intensidad de la señal cae por debajo de una intensidad mínima predeterminada.
En algunas formas de realización, el procesador 409 en el vehículo eléctrico 41 puede enviar balizas periódicas que están codificadas para coincidir con un código del dispositivo móvil 43. Al recibir la baliza, un procesador 401 del dispositivo móvil 43 envía una señal de regreso al vehículo eléctrico 41 con una indicación de su posición (por ejemplo, coordenadas GPS). En algunas formas de realización, las señales entre el vehículo eléctrico 41 y el dispositivo móvil 43 están encriptadas o codificadas de modo que solo el dispositivo móvil 43 emparejado correcto puede activar o apagar el vehículo eléctrico 41. En algunos casos, el procesador 401 del dispositivo móvil 43 utiliza un mecanismo de desbloqueo del dispositivo móvil 43 (por ejemplo, código, huella digital, reconocimiento facial, etc.) para generar una señal al vehículo eléctrico 41 que permite que el vehículo eléctrico 41 sea desbloqueado). Por ejemplo, el procesador 401 del dispositivo móvil 43 puede solicitar al usuario su huella digital y, tras la presentación satisfactoria de la huella digital, enviar un mensaje al vehículo eléctrico 41 confirmando que el vehículo eléctrico 41 puede arrancar.
En otra forma de realización, el dispositivo móvil 43 está programado por la aplicación para enviar señales de baliza periódicas que están codificadas para el vehículo eléctrico 41. Al recibir la señal de la baliza, el dispositivo móvil 43 y el vehículo comienzan a transmitir señales a través de un enlace inalámbrico que indica la posición del dispositivo móvil 43 para que el procesador 409 en el vehículo eléctrico 41 pueda implementar los procedimientos de bloqueo / desbloqueo descritos.
Tal como se muestra en la Figura 4, el vehículo eléctrico 41 incluye el procesador 409, una memoria 411, una batería 413, un motor 415, un dispositivo de entrada 417, una pantalla de tablero de instrumentos 419 y un componente de comunicación 421. El procesador 409 está configurado para interactuar con la memoria 411 y otros componentes (por ejemplo, componentes 413-421) en el vehículo eléctrico 41. La memoria 411 está acoplada al procesador 409 y está configurada para almacenar instrucciones para controlar otros componentes u otra información en el vehículo eléctrico 41. La batería 413 puede ser la batería principal mencionada anteriormente y está configurada para alimentar el motor 415 de manera que el motor 415 pueda mover el vehículo eléctrico 41. La pantalla del tablero de instrumentos 419 está configurada para presentar información visualmente a un usuario. El componente de comunicación 421 está configurado para comunicarse con otros sistemas (por ejemplo, el dispositivo móvil 43 o el servidor 45).
Tal como se muestra en la Figura 4, el dispositivo móvil 43 incluye el procesador 401, un componente de gestión de la ubicación 403, un componente de almacenamiento 405 y un componente de comunicación 407. El procesador 401 está configurado para controlar otros componentes del dispositivo móvil 43 y ejecutar instrucciones para realizar las operaciones deseadas.
El componente de gestión de la ubicación 403 está configurado para rastrear ubicaciones del dispositivo móvil 43 (por ejemplo, incluyendo trayectorias que muestran ubicaciones en el pasado). En algunas formas de realización, las ubicaciones del dispositivo móvil 43 pueden medirse mediante un sensor GPS (que no se muestra). En algunas formas de realización, la información de ubicación puede incluir datos medidos por un sensor giroscópico o un acelerómetro. La información de ubicación puede almacenarse en el componente de almacenamiento 405 o cargarse en el servidor 45. El componente de gestión de ubicación 403 está configurado para proporcionar la información de ubicación rastreada del dispositivo móvil 43.
En las formas de realización ilustradas, el componente de medición de la ubicación 417 está configurado para medir la ubicación del dispositivo móvil 43 basándose en la intensidad de la señal inalámbrica (por ejemplo, la intensidad de la señal de Bluetooth) u otras características de la señal. Las ubicaciones medidas del dispositivo móvil 43 se pueden analizar para determinar la ubicación actual del dispositivo móvil 43, de modo que se determine si se debe activar una función de “Encendido Automático de Proximidad” descrita anteriormente. Las ubicaciones medidas también se utilizan para determinar si bloquear o desbloquear el vehículo eléctrico 41 apagando o encendiendo la alimentación suministrada por la batería 413. En algunas formas de realización, el dispositivo móvil 43 puede implementarse como un controlador o un sistema de sistema en chip (SOC) que puede realizar las funciones descritas anteriormente. En algunas formas de realización, el componente de medición de la ubicación 417 puede usar dos o más fuentes de información para verificar la ubicación del dispositivo móvil 43. Por ejemplo, el componente de medición de la ubicación 417 puede utilizar la intensidad de la señal de Bluetooth así como señales o información con respecto a los movimientos del dispositivo móvil (por ejemplo, señales o información generada por un acelerador o un giroscopio en el dispositivo móvil 43).
En algunas formas de realización, el vehículo eléctrico 41 puede incluir (i) un módulo inalámbrico (por ejemplo, el componente de comunicación 421) configurado para establecer una conexión inalámbrica con el dispositivo móvil 43 para recibir señales inalámbricas desde el dispositivo móvil 43; (ii) un procesador (por ejemplo, el procesador 401) configurado para analizar al menos una característica de la conexión inalámbrica para determinar una ubicación actual del dispositivo móvil 43; y (iii) un primer componente de entrada / salida (I / O) (por ejemplo, el dispositivo de entrada 417 o la pantalla de tablero 419) configurado para generar una primera señal en respuesta a una acción del usuario. El procesador puede configurarse además para desbloquear el vehículo eléctrico 41 en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil 43 se encuentra dentro de un límite interno (por ejemplo, el límite interno 111) adyacente al vehículo eléctrico 41, y que se recibe la primera señal. El procesador 401 puede estar configurado además para bloquear el vehículo eléctrico 41 en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil 43 es externo a un límite externo (por ejemplo, el límite externo 109) externo al límite interno.
Las Figuras 5-7 son diagramas de flujo que ilustran los métodos 500, 600 y 700 de acuerdo con formas de realización de la tecnología descrita. El método 500 puede utilizarse para controlar (por ejemplo, desbloquear o bloquear) un vehículo encendiendo o apagando la alimentación de la batería del vehículo. El método 500 puede implementarse mediante un vehículo y un dispositivo móvil. En algunas formas de realización, el dispositivo móvil se puede implementar como un controlador, un conjunto de chips o circuitos independientes, u otros tipos de dispositivos adecuados. El método 500 comienza en el bloque 501 recibiendo una señal inalámbrica (por ejemplo, una señal de Bluetooth) desde un dispositivo móvil. En el bloque 503, el método 500 continúa analizando al menos una característica (por ejemplo, la intensidad de la señal) de la señal inalámbrica para determinar una ubicación actual del dispositivo móvil (por ejemplo, una distancia entre el vehículo y el dispositivo móvil).
En el bloque 505, el método 500 procede a continuación a desbloquear el vehículo en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil está dentro de un límite interno adyacente al vehículo (o una determinación de que el dispositivo móvil se mueve a través del límite interno), y que se recibe una primera señal de un primer componente de entrada / salida (I / O) del vehículo. En algunas formas de realización, alternativamente, el método 500 puede, en respuesta a una determinación de que la ubicación actual está en una primera zona predeterminada (por ejemplo, la Zona Z3 descrita anteriormente con referencia a las Figuras 1A-2C) adyacente al vehículo, habilitar un motor del vehículo que se encenderá al recibir instrucciones a través de un componente (por ejemplo, una pantalla o un botón) del vehículo alimentado por una batería del vehículo.
En el bloque 507, el método 500 continúa bloqueando el vehículo en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil es externo a un límite externo, que es externo al límite interno (o una determinación de que el dispositivo móvil se mueve a través del límite externo). En algunas formas de realización, alternativamente, el método 500 puede incluir, en respuesta a una determinación de que la ubicación actual está en una segunda zona predeterminada (por ejemplo, la Zona Z2 descrita anteriormente con referencia a las Figuras 1A-2C) junto a la primera zona predeterminada, habilitar el motor del vehículo que se va a apagar. En algunas formas de realización, el motor del vehículo se puede apagar automáticamente en respuesta a la determinación de que la ubicación actual está en la segunda zona predeterminada (si el motor no ha sido apagado por un usuario). En algunas formas de realización, cuando se determina que la ubicación actual del dispositivo móvil está en la segunda zona predeterminada, después de que el motor se haya apagado, el método
puede permitir que el motor se encienda además al recibir instrucciones a través del componente (por ejemplo, una pantalla o un botón) del vehículo alimentado por la batería. Se observa que el proceso de desbloqueo en el bloque 505 y el proceso de bloqueo en el bloque 507 se pueden implementar por separado en base al uso real (por ejemplo, solo se implementa el proceso de desbloqueo en el bloque 505 sin la implementación del bloque 507, o viceversa).
El método 600 está dirigido a bloquear un vehículo (por ejemplo, apagar la alimentación de la batería u otra fuente de alimentación) en base a una ubicación o trayectoria de movimiento de un dispositivo móvil asociado con el vehículo. El método 600 incluye, en el bloque 601, (1) recibir una señal inalámbrica desde un dispositivo móvil; (2) analizar al menos una característica de la señal inalámbrica con el fin de determinar una ubicación actual del dispositivo móvil (bloque 603); y (3) si la ubicación actual es externa a un límite externo, bloquear el vehículo, por ejemplo, apagando la fuente de alimentación de la batería y / o apagando un botón del vehículo alimentado por una batería del vehículo (bloque 605). En algunas formas de realización, apagar el botón del vehículo desactiva un motor del vehículo para que se encienda al recibir instrucciones a través del botón.
El método 700 está dirigido a desbloquear un vehículo (por ejemplo, encender su batería) basándose en una ubicación o trayectoria en movimiento de un dispositivo móvil asociado con el vehículo. El método 700 incluye, en el bloque 701, (1) recibir una señal inalámbrica desde un dispositivo móvil; (2) analizar al menos una característica de la señal inalámbrica con el fin de determinar una ubicación actual del dispositivo móvil (bloque 703); y (3) basándose al menos parcialmente en la ubicación actual, determinar si desbloquear el vehículo, por ejemplo, encendiendo un botón del vehículo alimentado por una batería del vehículo (bloque 705). En algunas formas de realización, encender el botón del vehículo permite encender un motor del vehículo al recibir instrucciones a través del botón.
Claims (14)
1. Un método (500) para controlar un vehículo (101), que comprende:
recibir (501) una señal inalámbrica desde un dispositivo móvil (103, 105); analizar (503) al menos una característica de la señal inalámbrica para determinar una ubicación actual del dispositivo móvil (103, 105);
desbloquear (505) el vehículo (101) en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil (103, 105) está dentro de un límite interno adyacente al vehículo (101), y que se recibe una primera señal desde un primer componente de entrada / salida (I / O) del vehículo (101); y
bloquear (507) el vehículo (101) en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil (103, 105) es externo a un límite externo (109) externo al límite interno (111),
en que el método comprende además:
en respuesta a la determinación de que el dispositivo móvil (103, 105) se mueve a través del límite interno (111) hacia el vehículo (101), encender una pantalla del vehículo (101) alimentada por una batería del vehículo (101).
2. El método (500) de la reivindicación 1, que comprende además
determinar el límite interno (111) y el límite externo (109) basándose en una configuración de usuario.
3. El método (500) de la reivindicación 1,
en que la al menos una característica de la señal inalámbrica incluye una intensidad de señal y / o una distancia entre el dispositivo móvil (103, 105) y el vehículo (101).
4. El método (500) de la reivindicación 1, que comprende además,
permitir que un motor del vehículo (101) se encienda al recibir la primera señal del primer componente de I / O y recibir una segunda señal de un segundo componente de I / O del vehículo (101) antes de recibir la primera señal, en que el primer componente de I / O es un botón físico, y en que el segundo componente de I / O es una palanca de freno, y en que la primera señal se genera en respuesta a una operación de presionar el botón físico, y en que la segunda señal se genera en respuesta a una operación de sostener la palanca de freno, o
activar el motor del vehículo (101) para que se encienda en respuesta a la determinación, en base a la ubicación actual, que el dispositivo móvil (103, 105) está dentro del límite interno (111) adyacente al vehículo (101), que la primera señal se recibe desde el primer componente de I / O del vehículo (101), y que una segunda señal se recibe de un segundo componente de I / O del vehículo (101) generalmente al mismo tiempo, en que el primer componente de I / O es un botón físico, y en que el segundo componente de I / O es una palanca de freno, y en que la primera señal se genera en respuesta a una operación de presionar el botón físico y en que la segunda señal se genera en respuesta a una operación de sujeción de la palanca de freno.
5. El método (500) de la reivindicación 1, que comprende además:
en respuesta a una determinación de que el dispositivo móvil (103, 105) se mueve a través del límite interno (111) hacia el vehículo (101), abrir una tapa del maletero del vehículo (101).
6. El método (500) de la reivindicación 1,
en que la señal inalámbrica proviene de un componente de comunicación inalámbrica activa del dispositivo móvil (103, 105), y en que el componente de comunicación inalámbrica activa está controlado por una aplicación instalada en el dispositivo móvil (103, 105).
7. El método (500) de la reivindicación 1,
en que en respuesta a una determinación de que el dispositivo móvil (103, 105) se mueve a través del límite interno (111) hacia el vehículo (101) o la determinación de que el dispositivo móvil (103, 105) está dentro del límite interno (111) adyacente al vehículo (101), en que el método comprende además (i) proporcionar alimentación a una luz indicadora del vehículo (101), (ii) reproducir un sonido desde un altavoz del vehículo (101), o (iii) proporcionar alimentación a un motor del vehículo (101) con el fin de provocar un movimiento del vehículo (101).
8. El método (500) de la reivindicación 1, que comprende además:
verificar la ubicación actual del vehículo (101) basándose al menos parcialmente en información medida por un sensor del dispositivo móvil (103, 105).
9. El método (500) de la reivindicación 1, que comprende además:
si la ubicación actual está dentro de un límite interno (111) adyacente al vehículo (101), permitir que un motor del vehículo (101) se encienda presionando un botón y sosteniendo una palanca de freno antes de presionar el botón o sosteniendo una palanca de freno del vehículo (101) y presionando el botón del vehículo (101).
10. El método de la reivindicación 1, en que el bloqueo del vehículo comprende además:
bloquear el vehículo (101) desconectando la fuente de alimentación de una batería del vehículo (101).
11. El método de la reivindicación 10, que comprende además la determinación de apagar la fuente de alimentación del vehículo (101) en respuesta a una determinación de que el dispositivo móvil (103, 105) se ha alejado del vehículo (101) a través del límite externo (109), en que preferentemente la determinación de que el dispositivo móvil (103, 105) se ha alejado del vehículo (101) se basa al menos parcialmente en analizar una trayectoria del dispositivo móvil (103, 105).
12. Un vehículo (101), que comprende:
un módulo inalámbrico (1011) configurado para recibir una señal inalámbrica desde un dispositivo móvil (103, 105);
un procesador (1013), acoplado al módulo inalámbrico (1011) y configurado para analizar al menos una característica de la señal inalámbrica para determinar una ubicación actual del dispositivo móvil (103, 105); y
un primer componente de entrada / salida (I / O), acoplado al procesador (1013), configurado para generar una primera señal en respuesta a una acción del usuario; en que el procesador (1013) está configurado además para desbloquear el vehículo (101) en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil (103, 105) se encuentra dentro de un límite interno (111) adyacente al vehículo (101), y que se recibe la primera señal; y
en que el procesador (1013) está configurado además para bloquear el vehículo (101) en respuesta a una determinación, basada en la ubicación actual, de que el dispositivo móvil (103, 105) es externo a un límite externo (109) que es externo al límite interno (111), en que el procesador (1013) está configurado además para, en respuesta a la determinación de que el dispositivo móvil (103, 105) se mueve a través del límite interno (111) hacia el vehículo (101), encender una pantalla del vehículo (101) alimentada por una batería del vehículo (101).
13. El vehículo (101) de la reivindicación 12, en que el primer componente de I / O comprende un botón físico, una pantalla táctil o una palanca de freno.
14. El vehículo (101) de la reivindicación 12, en que la al menos una característica de la señal inalámbrica incluye una intensidad de señal y / o una distancia entre el dispositivo móvil (103, 105) y el vehículo (101).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862732984P | 2018-09-18 | 2018-09-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| ES2848201T3 true ES2848201T3 (es) | 2021-08-05 |
Family
ID=67988894
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| ES19197675T Active ES2848201T3 (es) | 2018-09-18 | 2019-09-17 | Métodos para bloquear y / o desbloquear un vehículo eléctrico y aparato asociado |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US11377071B2 (es) |
| EP (1) | EP3626548B1 (es) |
| JP (1) | JP7061098B2 (es) |
| KR (1) | KR102433475B1 (es) |
| CN (1) | CN110905312B (es) |
| ES (1) | ES2848201T3 (es) |
| PH (1) | PH12019000348A1 (es) |
| TW (2) | TWI757629B (es) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020109360A1 (de) | 2020-04-03 | 2021-10-07 | Ford Global Technologies, Llc | System und Verfahren zur Automatisierung von Fahrzeugfunktionen |
| DE102020109379A1 (de) * | 2020-04-03 | 2021-10-07 | Ford Global Technologies, Llc | Verfahren und System zum automatisierten Ausführen von Fahrzeugfunktionen |
| GB2597498A (en) * | 2020-07-24 | 2022-02-02 | Continental Automotive Gmbh | System and method for controlling vehicle |
| CN111824289A (zh) * | 2020-07-29 | 2020-10-27 | 雅迪科技集团有限公司 | 一种基于蓝牙的电动车启动方法及系统 |
| US11325563B2 (en) * | 2020-08-06 | 2022-05-10 | GM Global Technology Operations LLC | Approach-based vehicle system actuation |
| CN112158163A (zh) * | 2020-08-20 | 2021-01-01 | 赛格威科技有限公司 | 车辆上下电控制方法、装置、系统及全地形车 |
| KR102219891B1 (ko) * | 2020-09-29 | 2021-02-24 | 주식회사 튠잇 | 키 제어 방법 및 키 제어 장치 |
| KR102493306B1 (ko) | 2020-12-16 | 2023-01-31 | 여태환 | 생체 인식 기반으로 이륜차에 대한 운전자 특정 시동 제어 및 운전 정보 생성을 수행하기 위한 장치 및 방법 |
| EP4016002A1 (en) * | 2020-12-17 | 2022-06-22 | Nxp B.V. | An infrastructure controller for an infrastructure |
| CN113060094B (zh) * | 2021-04-29 | 2022-07-26 | 北京车和家信息技术有限公司 | 一种车辆的控制方法、装置和车载设备 |
| DE102021120220A1 (de) | 2021-08-04 | 2023-02-09 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum Steuern eines Fahrzeugzugangs, computerlesbares Medium, System, und Fahrzeug |
| DE102022003321A1 (de) | 2021-09-15 | 2023-03-16 | Mercedes-Benz Group AG | System und Verfahren zum Fernparken eines Fahrzeugs |
| US20230339431A1 (en) * | 2022-04-25 | 2023-10-26 | Toyota Research Institute, Inc. | Systems and methods to utilize user trajectory analysis for automatic vehicle controls |
| DE102022118778A1 (de) | 2022-07-27 | 2024-02-01 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Fahrzeug, Vorrichtung und Verfahren für eine Annäherungserkennung für das Fahrzeug |
| DE102022118777A1 (de) | 2022-07-27 | 2024-02-01 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Fahrzeug, Vorrichtung und Verfahren zum sensorbasierten Konfigurieren einer Annäherungserkennung für das Fahrzeug |
| CN115393983A (zh) * | 2022-08-10 | 2022-11-25 | 上海派智能源股份有限公司 | 智能锁具的控制方法、控制系统、设备及介质 |
| US20240092313A1 (en) * | 2022-09-21 | 2024-03-21 | Ford Global Technologies, Llc | Consignment delivery methods and systems |
Family Cites Families (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6278379A (ja) * | 1985-09-30 | 1987-04-10 | 日産自動車株式会社 | 車両用施解錠制御装置 |
| JP3192715B2 (ja) | 1991-12-04 | 2001-07-30 | 富士通テン株式会社 | 車両用ワイヤレスドアロック制御装置 |
| DE19826904C2 (de) | 1998-06-17 | 2003-07-31 | Siemens Ag | Funkschlüssel |
| DE19912319C1 (de) * | 1999-03-19 | 2000-10-12 | Daimler Chrysler Ag | Elektronische Schließanlage, insbesondere Fahrzeugschließanlage |
| US6359348B1 (en) * | 1999-11-15 | 2002-03-19 | Lear Corporation | Semi-passive keyless entry method and device |
| DE10064141C2 (de) * | 2000-12-21 | 2003-06-18 | Siemens Ag | Verfahren zum Nachweis einer Berechtigung zum Ver- oder Entriegeln oder der Benutzung eines Objekts sowie Sicherheitsvorrichtung |
| JP4022859B2 (ja) | 2002-03-19 | 2007-12-19 | オムロン株式会社 | ドアロック制御装置 |
| JP3930386B2 (ja) | 2002-06-21 | 2007-06-13 | 株式会社東海理化電機製作所 | 電子キーシステム |
| JP4100568B2 (ja) | 2003-09-29 | 2008-06-11 | 本田技研工業株式会社 | 車両用リモートキー |
| US7466219B2 (en) | 2004-10-19 | 2008-12-16 | Sanyo Electric Co., Ltd. | Communication device and distance calculation system |
| US8325026B2 (en) * | 2005-04-29 | 2012-12-04 | Heistproof, Llc | Remote ignition, theft deterrence, and records keeping system for a vehicle |
| US8427276B2 (en) * | 2006-02-24 | 2013-04-23 | Denso International America, Inc. | Apparatus for automatically initiating sequence of vehicle functions |
| JP4929760B2 (ja) | 2006-03-02 | 2012-05-09 | 日本電気株式会社 | 携帯電話端末装置および電子鍵装置 |
| US20070241862A1 (en) * | 2006-04-12 | 2007-10-18 | Dimig Steven J | Transponder authorization system and method |
| JP2008189104A (ja) | 2007-02-05 | 2008-08-21 | Calsonic Kansei Corp | ヘッドアップディスプレイ認証装置 |
| US8126450B2 (en) | 2008-09-24 | 2012-02-28 | Embarq Holdings Company Llc | System and method for key free access to a vehicle |
| JP5451168B2 (ja) * | 2009-04-28 | 2014-03-26 | アルプス電気株式会社 | 車両のキーレスエントリー装置 |
| JP5273110B2 (ja) * | 2010-09-08 | 2013-08-28 | 株式会社デンソー | 発進制御装置 |
| JP5794047B2 (ja) | 2011-09-05 | 2015-10-14 | スズキ株式会社 | 自動二輪車の制御装置 |
| FR2986202A1 (fr) | 2012-01-26 | 2013-08-02 | Johnson Contr Automotive Elect | Moyen d'authentification portable et systeme de securite de vehicule pour un vehicule automobile |
| US8868254B2 (en) | 2012-06-08 | 2014-10-21 | Apple Inc. | Accessory control with geo-fencing |
| JP6211288B2 (ja) | 2013-04-05 | 2017-10-11 | アイシン精機株式会社 | 車両用オートドア操作装置、および車両に設けられる装飾部品 |
| GB2517128B (en) | 2013-05-31 | 2015-12-09 | Jaguar Land Rover Ltd | Vehicle communication system |
| US20160063786A1 (en) | 2014-08-26 | 2016-03-03 | Hyundai America Technical Center, Inc. | Smartphone enabled passive entry go system |
| JP6331959B2 (ja) * | 2014-10-21 | 2018-05-30 | 株式会社デンソー | 車載装置 |
| US9862353B2 (en) * | 2014-12-17 | 2018-01-09 | Denso International America, Inc. | Vehicle system and method for keyless authentication and control of an ignition system |
| US9799220B2 (en) * | 2015-02-04 | 2017-10-24 | Trw Automotive U.S. Llc | Keyless entry system linked to vehicle-to-vehicle communications system |
| JP6104311B2 (ja) * | 2015-05-13 | 2017-03-29 | 三菱電機株式会社 | 車両情報表示装置 |
| TWI625696B (zh) * | 2015-08-04 | 2018-06-01 | 睿能創意公司 | 用於電動載具共享之方法、系統及非暫時性計算機可讀取的儲存媒體 |
| TW201709713A (zh) * | 2015-08-31 | 2017-03-01 | Chunghwa Telecom Co Ltd | 智慧型手機自動上解鎖車門的系統與方法 |
| KR101768134B1 (ko) | 2015-09-21 | 2017-08-14 | 현대자동차주식회사 | 자동차용 시스템 전원 제어 장치 및 그 제어방법 |
| TWI561718B (en) | 2015-12-03 | 2016-12-11 | Brainchild Electronic Co Ltd | Door-lock system and door-lock control method |
| JP2017128884A (ja) | 2016-01-19 | 2017-07-27 | 株式会社東海理化電機製作所 | 車両用ドアロック装置 |
| JP6614999B2 (ja) | 2016-02-23 | 2019-12-04 | 株式会社東海理化電機製作所 | 電子キーシステム |
| JP2017160761A (ja) | 2016-03-11 | 2017-09-14 | オムロンオートモーティブエレクトロニクス株式会社 | 車両制御装置 |
| KR101718072B1 (ko) | 2016-03-30 | 2017-03-20 | 현대자동차주식회사 | 차량 및 차량의 제어방법 |
| TWI759295B (zh) * | 2016-04-12 | 2022-04-01 | 德商羅伯特博斯奇股份有限公司 | 用於二輪車的上鎖裝置及其操作的方法 |
| WO2017182556A1 (en) | 2016-04-21 | 2017-10-26 | Hella Kgaa Hueck & Co. | A system and a method for immobilization of vehicles |
| WO2018054943A1 (de) * | 2016-09-20 | 2018-03-29 | Huf Hülsbeck & Fürst Gmbh & Co. Kg | Verfahren zur aktivierung mindestens einer funktion eines fahrzeugs |
| US11024160B2 (en) | 2016-11-07 | 2021-06-01 | Nio Usa, Inc. | Feedback performance control and tracking |
| DE102016221924A1 (de) * | 2016-11-09 | 2018-05-09 | Audi Ag | Verfahren zum Betreiben einer Zentralverriegelungsvorrichtung, Zentralverriegelungsvorrichtung und Kraftfahrzeug |
| CN106530470A (zh) | 2016-12-14 | 2017-03-22 | 余仁植 | 一种车辆解锁方法、锁定解锁装置、车辆及车辆系统 |
| GB2558590A (en) * | 2017-01-09 | 2018-07-18 | Jaguar Land Rover Ltd | Vehicle entry system |
| JP2018115463A (ja) | 2017-01-18 | 2018-07-26 | 株式会社東海理化電機製作所 | 電子キーシステム、電子制御装置および受信機 |
| WO2018191894A1 (zh) * | 2017-04-19 | 2018-10-25 | 深圳市汇顶科技股份有限公司 | 一种车辆解锁方法及车辆解锁系统 |
| TWM561877U (zh) | 2017-12-08 | 2018-06-11 | Cycling & Health Tech Ind R&D Center | 共享單車之使用管理系統 |
| TWM562879U (zh) * | 2018-03-29 | 2018-07-01 | 陳澤興 | 無線門鎖裝置及具有該無線門鎖裝置之生物辨識門鎖控制系統 |
| US11055936B2 (en) * | 2019-05-02 | 2021-07-06 | Voxx International Corporation | Multi-sensor passive keyless functionality |
-
2019
- 2019-08-15 US US16/542,250 patent/US11377071B2/en active Active
- 2019-08-23 TW TW108130315A patent/TWI757629B/zh active
- 2019-08-23 TW TW110134207A patent/TWI777769B/zh active
- 2019-08-26 JP JP2019153941A patent/JP7061098B2/ja active Active
- 2019-08-27 KR KR1020190105094A patent/KR102433475B1/ko active IP Right Grant
- 2019-09-12 PH PH12019000348A patent/PH12019000348A1/en unknown
- 2019-09-17 ES ES19197675T patent/ES2848201T3/es active Active
- 2019-09-17 EP EP19197675.2A patent/EP3626548B1/en active Active
- 2019-09-18 CN CN201910882621.XA patent/CN110905312B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| TWI777769B (zh) | 2022-09-11 |
| EP3626548A1 (en) | 2020-03-25 |
| EP3626548B1 (en) | 2020-12-02 |
| KR102433475B1 (ko) | 2022-08-18 |
| US11377071B2 (en) | 2022-07-05 |
| PH12019000348A1 (en) | 2020-03-23 |
| TWI757629B (zh) | 2022-03-11 |
| TW202200890A (zh) | 2022-01-01 |
| KR20200033170A (ko) | 2020-03-27 |
| US20200086829A1 (en) | 2020-03-19 |
| JP2020079542A (ja) | 2020-05-28 |
| CN110905312A (zh) | 2020-03-24 |
| TW202035846A (zh) | 2020-10-01 |
| CN110905312B (zh) | 2021-04-13 |
| JP7061098B2 (ja) | 2022-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| ES2848201T3 (es) | Métodos para bloquear y / o desbloquear un vehículo eléctrico y aparato asociado | |
| ES2718601T3 (es) | Sistema de bicicleta | |
| CN106293032B (zh) | 便携终端设备及其控制方法和装置 | |
| US8521419B2 (en) | Method for locating a vehicle | |
| WO2018096970A1 (ja) | 電子機器、車両、制御装置、制御プログラム及び電子機器の動作方法 | |
| CN104656503A (zh) | 自主车辆中的可穿戴计算机 | |
| CN105916742A (zh) | 用于激活车辆组件的车辆系统 | |
| JP2007295033A (ja) | 遠隔操作制御装置およびその操作端末 | |
| JP6184119B2 (ja) | 車両用キーレスシステム | |
| JP5618887B2 (ja) | 車両用制御装置 | |
| JP2008213514A (ja) | 電子キーシステム、及び携帯機 | |
| JP2008015801A (ja) | 車両探索システム、リモコン、車載ユニット、および、車両探索方法 | |
| JP2014152458A (ja) | 車両用キーレスシステム | |
| KR20160100085A (ko) | 무선통신 제어모듈을 갖춘 자전거와 그 제어방법 | |
| ES2940699T3 (es) | Vehículo eléctrico | |
| KR20200050610A (ko) | 차량의 엔진 시동 제어 장치 및 그 방법 | |
| JP2020149485A (ja) | 車両制御装置 | |
| KR101902657B1 (ko) | 스마트카에서 차량을 회수하기 위한 IoT 보안 장치, 이를 위한 방법 및 이 방법을 수행하는 프로그램이 기록된 컴퓨터 판독 가능한 기록매체 | |
| US20210347261A1 (en) | Driver anti-distraction device (dadd) | |
| JP7422419B2 (ja) | 携帯機器、遠隔制御装置、システム及びプログラム | |
| JP2009272993A (ja) | 通信システム | |
| KR20150101265A (ko) | Gps와 ins를 이용한 차량 위치정보 제공 및 확인장치, 그 방법 |