EP3033035B1 - Éléments d'entraînement d'adaptateur stérile d'instrument - Google Patents
Éléments d'entraînement d'adaptateur stérile d'instrument Download PDFInfo
- Publication number
- EP3033035B1 EP3033035B1 EP14836832.7A EP14836832A EP3033035B1 EP 3033035 B1 EP3033035 B1 EP 3033035B1 EP 14836832 A EP14836832 A EP 14836832A EP 3033035 B1 EP3033035 B1 EP 3033035B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- disk
- drive
- assembly
- preload
- interface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000036316 preload Effects 0.000 claims description 312
- 241000282472 Canis lupus familiaris Species 0.000 claims description 186
- 230000008878 coupling Effects 0.000 claims description 34
- 238000010168 coupling process Methods 0.000 claims description 34
- 238000005859 coupling reaction Methods 0.000 claims description 34
- 230000007246 mechanism Effects 0.000 description 55
- 230000033001 locomotion Effects 0.000 description 52
- 238000003780 insertion Methods 0.000 description 47
- 230000037431 insertion Effects 0.000 description 47
- 230000000712 assembly Effects 0.000 description 21
- 238000000429 assembly Methods 0.000 description 21
- 238000001356 surgical procedure Methods 0.000 description 16
- 230000005540 biological transmission Effects 0.000 description 15
- 230000000670 limiting effect Effects 0.000 description 13
- 238000000034 method Methods 0.000 description 12
- 238000012546 transfer Methods 0.000 description 12
- 230000004044 response Effects 0.000 description 10
- 230000004888 barrier function Effects 0.000 description 8
- 230000000994 depressogenic effect Effects 0.000 description 7
- 238000005096 rolling process Methods 0.000 description 7
- 230000005355 Hall effect Effects 0.000 description 5
- 210000002105 tongue Anatomy 0.000 description 5
- 229920002873 Polyethylenimine Polymers 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000036961 partial effect Effects 0.000 description 4
- 230000002829 reductive effect Effects 0.000 description 4
- 210000002435 tendon Anatomy 0.000 description 4
- 210000003857 wrist joint Anatomy 0.000 description 4
- 230000000295 complement effect Effects 0.000 description 3
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 239000012636 effector Substances 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000011900 installation process Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 238000012978 minimally invasive surgical procedure Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000003032 molecular docking Methods 0.000 description 2
- 239000004417 polycarbonate Substances 0.000 description 2
- 229920000515 polycarbonate Polymers 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000004140 cleaning Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000002405 diagnostic procedure Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000009347 mechanical transmission Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000002985 plastic film Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 230000001954 sterilising effect Effects 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
Images
























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
Definitions
- the present invention relates generally to surgical instruments and systems, and more particularly to surgical instruments with low backlash drive systems.
- Robotically controlled systems such as employed for minimally invasive medical procedures can include large and complex equipment to precisely control and drive relatively small tools or instruments.
- Robot or “robotically” and the like include teleoperation or telerobotic aspects.
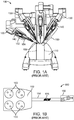
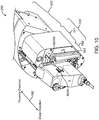
- Fig. 1A illustrates an example of a known robotically controlled system 100.
- System 100 which may, for example, be part of a da Vinci® Surgical System commercialized by Intuitive Surgical, Inc., includes a patient-side cart 110 having multiple arms 130.
- Each arm 130 has a docking port 140 that generally includes a drive system with a mechanical interface for mounting and providing mechanical power for operation of an instrument 150. Arms 130 can be used during a medical procedure to move and position respective medical instruments 150 for the procedure.
- Fig. 1B shows a bottom view of a known instrument 150.
- Instrument 150 generally includes a transmission or backend mechanism 152, a main tube 154 extending from the backend mechanism 152, and a functional tip 156 at the distal end of the main tube 154.
- Tip 156 generally includes a medical tool such as a scalpel, scissors, forceps, or a cauterizing instrument that can be used during a medical procedure.
- Drive cables or tendons 155 connected to tip 156 and extend through main tube 154 to backend mechanism 152.
- Backend mechanism 152 typically provides a mechanical coupling between the drive tendons of the instrument 150 and motorized axes of the mechanical interface of a drive system 140.
- gears or disks 153 have features such as projections or holes that are positioned, sized, and shaped to engage complementary features on the mechanical interface of a drive system 140.
- rotation of disks 153 pulls on respective tendons 155 and actuates corresponding mechanical links in tip 156.
- System 100 can thus control movement and tension in drive tendons 155 as needed to position, orient, and operate tip 156.
- Further details of known surgical systems are described, for example, in U.S. Pat. No. 7,048,745 (filed Aug. 13, 2001) to Tierney et al. , entitled "Surgical Robotic Tools, Data Architecture, and Use,".
- Instruments 150 of system 100 can be interchanged by removing one instrument 150 from a drive system 140 and then installing another instrument 150 in place of the instrument removed.
- the installation process in general requires that the features on disks 153 properly engage complementary features of drive system 140.
- the orientations of disks 153 on instrument 150 are generally unknown to patient-side cart 110.
- a sterile barrier e.g., a plastic sheet drape
- This sterile barrier can include a sterile adaptor that is interposed between docking port 140 and instrument backend 152. See for example, U.S. Pat. No. 7,048,745 and U.S. Pat. No. 7,699,855 (filed Mar. 31, 2006) to Anderson et al. , entitled "Sterile Surgical Adaptor", describe some exemplary sterile barrier and adaptor systems.
- a typical installation process for an instrument 150 involves mounting backend mechanism 152 without regard for the orientations of disks 153 on a drive system 140, possibly with an intervening sterile adaptor.
- the drive motors in drive system 140 may be then be rotated back and forth multiple times during the installation procedure to ensure that the complementary features mesh with and securely engage each other for operation of the newly installed instrument 150.
- the drive motors become securely engaged to rotate respective disks 153.
- the instrument 150 being installed may move in an unpredictable manner at times during the installation procedure because the drive motors positively engage respective disks 153 of instrument 150 at different and unpredictable times. For certain applications, such unpredictable motion is unacceptable.
- clear or confined space is required around an instrument 150 to accommodate random movements of the instrument tip during an installation procedure.
- US 2010/170519 A1 discloses a robotic surgical system configured to perform minimally invasive surgical procedures.
- this robotic surgical system includes an instrument driver configured to steer an elongate instrument of an instrument assembly in one or more degrees of motion.
- a drape is disposed between the instrument driver and the instrument assembly.
- a drive interface apparatus is operatively coupled to the drape.
- the drape and drive interface apparatus may form a fluid barrier between the instrument driver and the instrument assembly.
- Drive interface apparatus may be disposed on a top surface of the instrument driver and on a bottom surface of the instrument assembly.
- the drive interface apparatus may transmit torque from the instrument driver to the instrument assembly.
- the input torque drives a pulley in the instrument assembly that operates one or more control wires to steer an elongate instrument of the instrument assembly for performing minimally invasive surgical procedures.
- US 2012/247489 A1 discloses a sterile drape with integrated sterile adaptor, a telerobotic surgical system, and method of use are provided for draping portions of a telerobotic surgical system to maintain a sterile barrier between the sterile surgical field and the non-sterile robotic system while also providing an interface for transferring mechanical and electrical energy and signals.
- WO 2010/081050 discloses a robotic catheter system configured with a sterile barrier capable of transmitting a rotary force from a drive system on one side of the barrier to a surgical tool on the other side of the sterile barrier for performing minimally invasive diagnostic and therapeutic procedures.
- US 6,494,662 describes remote control of a mechanical transmission, more particularly remote control of at least one gripping element by a monodirectional action, whereby the gripping element includes an articulation which can close by converging upon the object which is to be gripped and which can be locked in an active position upon contact with said object and the control device can be disengaged in the gripping position.
- the patent discloses a device that includes a) a primary pulley which is joined to a control cable; b) a spring which angularly returns the primary pulley to its initial position counter to the action of the cable; c) a secondary pulley which is joined to the end of the output cable terminating in the elements which are to be controlled; d) a self-disengaging mechanical drive disc which, for a torque value exceeding a given threshold, can displace the secondary pulley in a disengaged position; e) a locking ring for the second pulley in a disengaged position; f) opposing trapezoid-shaped teeth on opposite surfaces of the disk and secondary pulley, whereby the pulley can be alternatively driven by ring dogging by the disk and the teeth can be disengaged by a cam effect on the basis of a given torque.
- the present invention provides an apparatus comprising: a surgical device interface element comprising a first body structure and a plurality of intermediate disks rotatably mounted in the first body structure; each intermediate disk of the plurality of intermediate disks being configured to interface with a drive output disk of an instrument manipulator assembly and a driven disk of an instrument, and each intermediate disk of the plurality of intermediate disks comprising a proximal driven interface, a distal drive interface, and a distal surface; the driven interface comprising a first alignment receptacle and drive dog receptacles; the drive interface being opposite and removed from the driven interface, the drive interface comprising drive dogs and an engagement structure, and the engagement structure comprising an open three-dimensional structure extending in a distal direction from the distal surface of the intermediate disk.
- a surgical system which includes a surgical instrument that is sensitive to backlash that would adversely affect the transmission of controlled torque and position to the surgical instrument.
- the surgical instrument is coupled to motors in a surgical instrument manipulator assembly via a mechanical interface.
- the combination of the mechanical interface and surgical instrument manipulator assembly has a low backlash, e.g. less than 0.7 degrees.
- the mechanical interface couples a drive interface in the surgical instrument manipulator assembly to a driven interface of the surgical instrument.
- the mechanical interface has zero backlash for torque levels used in surgical procedures, in one example.
- an apparatus includes a surgical instrument manipulator assembly.
- the surgical instrument manipulator assembly includes a drive unit and a drive output assembly.
- the drive output assembly is coupled to the drive unit.
- the drive output assembly includes a low backlash coupler coupled to the drive unit.
- a drive output disk is coupled to the low backlash coupler.
- a portion of the surgical instrument manipulator assembly backlash is in the coupling of the drive unit and the drive output disk to the low backlash coupler.
- the drive output disk is a cylindrical body with a distal end surface.
- a first alignment element extends from the distal end surface.
- a second alignment element also extends from the distal end surface. The first alignment element is separated from the second alignment element. The combination of the first and second alignment elements orients the drive output disk to a disk of another assembly in the apparatus when the drive output disk and the disk are mated.
- the first alignment element is a pin
- the second alignment element is a tab.
- the distal end surface of the drive output disk has a center and a circumferential edge.
- a plurality of drive dogs extend from the distal end surface.
- Each drive dog includes a first edge surface positioned a first distance from the center, and a second edge surface positioned about adjacent to the circumferential edge. The second edge surface is opposite the first edge surface.
- each drive dog includes second portion side surfaces is curved surface.
- the curved surface is a portion of a circular section, e.g., a portion of an outer surface of a cylinder.
- the drive output assembly also includes a shaft.
- a first preload spring is coupled to the shaft.
- the first preload spring also is coupled to the drive output disk.
- the first preload spring is configured to apply a first preload force on the drive output disk when the first preload spring is compressed.
- the drive output assembly also includes a second preload spring coupled to the shaft.
- the second preload spring in combination with the first preload spring is configured to apply a second preload force on the drive output disk when the first and second preload springs are compressed.
- the second preload force is larger than the first preload force.
- the surgical instrument manipulator assembly includes a motor pack including a plurality of drive units.
- the plurality of drive units includes the drive unit described previously.
- the motor pack is moveably mounted in a housing of the surgical instrument manipulator assembly.
- the motor pack also includes a plurality of hard stops. The plurality of hard stops is configured to extend from a distal face of the motor pack.
- the surgical instrument manipulator assembly also includes a release latch.
- the release latch is pivotally mounted in the housing of the surgical instrument manipulator assembly.
- a pin extends inside the housing from a proximal portion of the release latch.
- the pin is a spring-loaded pin.
- the motor pack of the surgical instrument manipulator assembly also includes a release latch inhibit stop. If the motor pack is at a fully withdrawn position relative to the housing of the surgical instrument manipulator assembly, operation of the release latch is not inhibited, in one example. However, if the motor pack is at a first position relative to the housing, the pin contacts the release latch inhibit stop and prevents pivoting of the release latch if the release latch is pressed. In another example, the release latch inhibit stop prevents pivoting of the release latch when the motor pack is at the fully withdrawn position while a surgical instrument is mounted in the sterile adapter assembly.
- the apparatus includes a surgical device assembly, a preload track, and a preload assembly riding on the preload track.
- the preload assembly is coupled to the surgical device assembly.
- An insertion assembly includes the preload track.
- the preload assembly When the preload assembly is positioned at a first location on the preload track, the preload assembly applies a first force to the surgical device assembly. When the preload assembly is positioned at a second location on the preload track, the preload assembly applies a second force to the surgical device assembly. The second force is larger than the first force.
- the preload assembly includes a cam follower assembly and an arm.
- the cam follower assembly rides on the preload track.
- the arm has a first end and a second end. The first end is coupled to the surgical device assembly. The second end of the arm is coupled to the cam follower assembly. If the cam follower assembly is positioned at the first location on the preload track, the arm is configured to transfer a force proportional to the first force from the cam follower assembly to the surgical device assembly. If the cam follower assembly is positioned at the second location on the preload track, the arm is configured to transfer a force proportional to the second force from the cam follower assembly to the surgical device assembly.
- the surgical device assembly also includes a drive unit housing and a motor pack.
- the motor pack is movably mounted in the drive unit housing.
- the first end of the arm is coupled to the motor pack. If the cam follower assembly is positioned at the first location on the preload track, the arm is configured to transfer a force proportional to the first force from the cam follower assembly to the motor pack. If the cam follower assembly is positioned at the second location on the preload track, the arm is configured to transfer a force proportional to the second force from the cam follower assembly to the motor pack.
- an apparatus in another example, includes a preload track and a preload assembly configured to ride on the preload track.
- the preload assembly is configured to couple to a surgical device assembly.
- the preload assembly also is configured to apply a first force to the surgical device assembly if the preload assembly is positioned at a first location on the preload track.
- the preload assembly includes a preload reset mechanism.
- the preload reset mechanism is configured to automatically position the preload assembly at the first location on the preload track.
- an apparatus in yet another example, includes a surgical instrument manipulator assembly, an insertion assembly, and a preload assembly.
- the surgical instrument manipulator assembly includes a housing and a motor pack.
- the motor pack is movably mounted in the housing.
- the insertion assembly is coupled to the surgical instrument manipulator assembly.
- the insertion assembly also includes a preload track.
- the preload assembly includes a cam follower assembly, an arm, and a preload rest assembly.
- the arm includes a first end and a second end. The first end of the arm is rotatably connected to the cam follower assembly. The second end of the arm is coupled to the motor pack.
- the cam follower assembly is configured to ride on the preload track.
- the preload reset assembly is configured to automatically position the preload assembly at a first location on the preload track. At the first location, the preload assembly applies a first force on the motor pack.
- Another apparatus includes an insertion assembly, an instrument manipulator assembly, a surgical device interface, and a surgical instrument.
- the surgical device interface is referred to as a surgical device interface element.
- the insertion assembly includes a distal end and a preload track.
- the instrument manipulator assembly is coupled to the distal end of the insertion assembly.
- the instrument manipulator assembly includes a drive output disk.
- the drive output disk has a drive output interface.
- the surgical device interface is mounted on the instrument manipulator assembly.
- the surgical device interface includes an intermediate disk.
- the intermediate disk has an intermediate driven interface and an intermediate drive interface.
- the intermediate driven interface is coupled to the drive output interface.
- the surgical instrument is mounted on the surgical device interface.
- the surgical instrument includes a driven disk.
- the driven disk has a driven interface.
- the driven interface is coupled to the intermediate drive interface.
- the coupling between the drive output disk and the intermediate disk has non-zero backlash for torque levels used to bring the two disks into alignment. If a second force is applied to the coupling between the drive output disk and the intermediate disk, the coupling between the drive output disk and the intermediate disk has zero backlash for torque levels used in surgical procedures. The second force is larger than the first force.
- the apparatus includes a drive output disk and an intermediate disk.
- the drive output disk includes a distal end surface and a plurality of drive dogs extending from the distal end surface.
- Each drive dog of the plurality of drive dogs includes a first portion that is a three-dimensional structure, e.g., a three-dimensional rectangle, which extends from the distal end surface, and a second portion extending from the first portion.
- the second portion includes two opposing second portion side surfaces.
- Each of the second portion side surfaces is a curved surface.
- the curved surface is a portion of a circular section, e.g., a portion of an outer surface of a cylinder.
- the intermediate disk includes a proximal end surface, and a plurality of drive dog receptacles extending from the proximal end surface into the intermediate disk.
- Each drive dog receptacle of the plurality of drive dog receptacles is configured to receive one of the plurality of drive dogs.
- Each drive dog receptacle of the plurality includes a first portion that includes opposed sidewalls extending from the outer surface into the intermediate disk, a second portion is a bottom surface of the drive dog receptacle, and a third portion extending from the first portion to the second portion.
- the third portion has two opposing third portion sloped side surfaces.
- the apparatus has a first preload spring coupled to the drive output disk.
- the first preload spring is compressed when the drive output disk is coupled to the intermediate disk.
- the compression of the first preload spring applies a preload force to the drive output disk.
- the coupling between the drive output disk and the intermediate disk has non-zero backlash for torque levels necessary to bring the disks into alignment.
- the apparatus also includes a second preload spring coupled to the drive output disk.
- a preload assembly is coupled to the first and second preload springs. When the preload assembly compresses the first and second preload springs, the compressed second spring in combination with the compressed first spring applies a second preload force to a coupling between the drive output disk and the intermediate disk. When the second preload force is applied to the coupling, the coupling between the drive output disk and the intermediate disk has zero backlash for torque levels used in surgical procedures.
- the apparatus includes a surgical device interface element.
- the surgical device interface element includes a plurality of intermediate disks and a first body structure having rotatably mounted therein the plurality of intermediate disks.
- Each intermediate disk includes an intermediate driven interface and an intermediate drive interface.
- the intermediate drive interface is opposite from the intermediate driven interface.
- the intermediate driven interface includes a first alignment receptacle and drive dog receptacles.
- the intermediate drive interface includes drive dogs and an engagement structure.
- the first alignment receptacle is configured to mate with a first alignment element extending from a drive output disk of a surgical instrument manipulator assembly.
- the intermediate driven interface also includes a second alignment receptacle.
- the second alignment receptacle is configured to mate with a second alignment element extending from the drive output disk.
- the first alignment receptacle is separated from the second alignment receptacle. The combination of the first and second alignment receptacles orients the drive output disk to the intermediate disk when the drive output disk and the intermediate disk are coupled, e.g., mated.
- the first body structure includes a plurality of hard stops. Each intermediate disk is associated with one of the hard stops. Each intermediate disk has a hard stop tab extending from an outer side surface of that disk. In a first axial position of the intermediate disk, the hard stop tab contacts the hard stop associated with the intermediate disk when the intermediate disk is rotated. In a second axial position of the intermediate disk, the intermediate disk rotates freely without the hard stop tab contacting the hard stop associated with the intermediate disk.
- Each of the drive dog receptacles includes a first portion having opposed sidewalls extending from an outer surface of the intermediate disk into the intermediate disk.
- a second portion of the drive dog receptacle is a bottom surface of the drive dog receptacle.
- a third portion of the drive dog receptacle extends from the first portion to the second portion.
- the third portion includes two opposing third portion side surfaces.
- Each of the third portion side surfaces is a sloped surface. In one example, the sloped surface is a portion of a side surface of a wedge.
- Each of the drive dogs of the intermediate disk has a first portion that is a three-dimensional structure, e.g., a three-dimensional rectangle.
- a second portion of the drive dog extends from the first portion.
- the second portion has two opposing second portion side surfaces.
- Each of the second portion side surfaces is a portion of curved surface.
- the curved surface is a portion of a circular section, e.g., a portion of an outer surface of a cylinder.
- Each of the drive dog receptacles of the intermediate disk is positioned so that each of the drive dog receptacles is bisected by a first plane.
- Each of the drive dogs of the intermediate disk is positioned so that each of the drive dogs is bisected by a second plane.
- the first plane is perpendicular to the second plane.
- the surgical device interface element also includes a second body structure.
- the first body structure is movably mounted in the second body structure.
- the second body structure includes a skid plate.
- the intermediate disk also has a distal surface.
- the engagement structure in one example, is an open three-dimensional structure extending in a distal direction from the distal surface.
- the open three-dimensional structure is a generally C-shaped structure.
- the C-shaped structure has a height, a first end, and a second end.
- the first and second ends bound an opening of the C-shaped structure.
- a centerline extends through a center of the C-shaped structure. The centerline is equidistance from the first and second ends.
- the open three-dimensional structure also includes a wall extending from one of the first and second ends.
- the wall extends in a direction substantially parallel to the centerline of the C-shaped structure.
- the wall also extends towards an outer edge of the distal surface of the intermediate disk.
- the wall has a height that is smaller than the height of the C-shaped structure.
- the open three-dimensional structure is a circular track.
- the circular track includes a first circumferential section having a first height, a first end, and a second end.
- the circular track also includes a second circumferential section extending between the first and second ends of the first circumferential section.
- the second circumferential section has a second height. The second height is less than the first height.
- a centerline of the circular tracks extends through a center of the circular track and is equidistance from the first and second ends.
- the C-shaped structure is an example of the circular track.
- the open three-dimensional structure also includes a wall extending in a direction substantially parallel to the centerline of the circular section from one of the first and second ends of the first circumferential section. The wall extends towards an outer edge of the distal surface of the intermediate disk of the plurality of intermediate disks. The wall has a height. The height of the wall is smaller than the first height of the first circumferential section.
- the surgical device interface element is mounted on a surgical instrument manipulator assembly.
- the surgical instrument manipulator assembly includes a drive output disk having a drive interface.
- the drive interface is coupled with the intermediate driven interface of the intermediate disk.
- the coupling between the intermediate disk and the drive output disk has zero backlash for torque levels used in surgical procedures.
- a surgical instrument is mounted on the surgical device interface element.
- the surgical instrument further has a driven disk with a driven interface.
- the driven interface is coupled to the intermediate drive interface of the intermediate disk.
- the apparatus includes an intermediate disk and a driven disk.
- the intermediate disk includes an intermediate driven interface and an intermediate drive interface.
- the intermediate drive interface is opposite from the intermediate driven interface.
- the intermediate driven interface includes an alignment receptacle and drive dog receptacles.
- the intermediate drive interface includes drive dogs and an engagement structure.
- the driven disk includes a driven interface configured to mate with the intermediate drive interface.
- the driven interface includes an engagement receptacle, drive dog receptacles, and a rotation disable element.
- the rotation disable element includes a rotation locking mechanism that prevents rotation of the driven disk.
- the engagement receptacle is configured to receive the engagement structure if the engagement structure is aligned with the engagement receptacle.
- the apparatus includes a surgical instrument.
- the surgical instrument includes a body that has a driven disk receptacle.
- a proximal end of a shaft, which is in the surgical instrument, extends into the driven disk receptacle.
- a driven disk is mounted on the proximal end of the shaft so that the driven disk is positioned in the driven disk receptacle.
- the driven disk includes a driven interface.
- the driven interface includes an engagement receptacle, drive dog receptacles, and a rotation disable element.
- the rotation disable element has a rotation locking mechanism. Upon engagement of the rotation disable element, the rotation locking mechanism engages the driven disk receptacle and prevents rotation of the driven disk.
- Each of the drive dog receptacles includes a first portion, a second portion, and a third portion.
- the first portion includes opposed sidewalls extending from a proximal surface of the driven disk into the driven disk.
- the second portion is a bottom surface of the drive dog receptacle.
- the third portion extends from the first portion to the second portion.
- the third portion has two opposing third portion side surfaces.
- Each of the third portion side surfaces includes a sloped surface.
- the sloped surface is a portion of a side surface of a wedge.
- each drive dog receptacle includes a first edge surface positioned a first distance from a longitudinal axis of the driven disk, and a second open edge opposite the first edge.
- the engagement receptacle includes a groove extending from a proximal surface of the driven disk into the driven disk.
- the groove extends from a first end to a second end.
- the groove has a width and a depth.
- the first end of the groove is separated from the rotation disable element by a first gap.
- the second end of the groove is separated from the rotation disable element by a second gap.
- the width and depth of the groove is sized to accept an engagement structure of an intermediate drive interface on an intermediate disk.
- the rotation disable element is a flexure.
- the rotation locking mechanism extends from the flexure.
- the rotation locking mechanism includes a tang.
- the driven disk receptacle has a bottom surface.
- a plurality of teeth extends in a proximal direction from the bottom surface.
- the apparatus also includes a sterile adapter assembly.
- the surgical instrument is mounted on the sterile adapter assembly.
- the sterile adapter assembly includes an intermediate disk having an intermediate drive interface coupled with the driven interface of the driven disk. Upon applying a predetermined preload force to the intermediate disk, the coupling between the intermediate disk and the driven disk has zero backlash.
- the apparatus also includes a surgical instrument manipulator assembly.
- the sterile adaptor assembly is mounted on the surgical instrument manipulator assembly.
- the surgical instrument manipulator assembly further includes a drive output disk having a drive interface coupled with the driven interface of the intermediate disk. Upon applying the predetermined preload force to the drive output disk, the coupling between the intermediate disk and the drive output disk has zero backlash for torque levels used in surgical procedures.
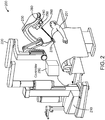
- a surgical system 200 ( Fig. 2 ), e.g., a minimally invasive teleoperated surgical system, includes a patient-side cart 210 having an arm 220. At an end of arm 220 is an entry guide manipulator 230. Mounted on entry guide manipulator 230 is a master instrument manipulator 280 that in turn supports multiple surgical device assemblies.
- a surgical device assembly includes a surgical instrument manipulator assembly 240, an instrument sterile adapter assembly 250, and a surgical instrument 260.
- Surgical instrument manipulator assembly 240 is sometimes referred to as instrument manipulator assembly 240.
- Instrument sterile adapter assembly 250 is sometimes referred to as sterile adapter assembly 250.
- Entry guide manipulator 230 changes the pitch and yaw of the surgical device assemblies as group.
- a main tube of each surgical instrument 260 extends through a different channel in a single port entry guide 270.
- Single port entry guide 270 is mounted in a cannula, in this aspect.
- Single port refers to a single access location (e.g., a single incision, a single natural orifice, and the like) to a surgical site inside the patient.
- a cannula is a tube that passes through the patient's body wall, and that comes in direct contact with the patient.
- the cannula generally does not slide in and out relative to the patient, but the cannula can pitch and yaw around a point on its axis called the remote center of motion.
- singe port entry guide 270 is a tube through which all surgical instruments and a camera instrument must pass to reach a location inside the patient. Entry guide 270 has separate lumens for each instrument. Entry guide 270 passes through the cannula, and may twist relative to the cannula.
- backlash is a maximum angle through which one part of a mechanical interface can be moved without moving a connected part of the mechanical interface.
- Surgical instrument 260 is sensitive to backlash that would adversely affect the transmission of controlled torque and position from instrument manipulator assembly 240 to surgical instrument 260.
- surgical instrument 260 is coupled to motors in instrument manipulator assembly 240 via a mechanical interface.
- the combination of the mechanical interface and instrument manipulator assembly 240 has low backlash, e.g., less than 0.7 degrees. From the output disk (the drive output disk) in instrument manipulator assembly 240 to the input disk (the driven disk) of surgical instrument 260, the mechanical interface has zero backlash, in one aspect.
- the mechanical interface includes sterile adapter assembly 250.
- Sterile adapter assembly 250 includes a sterile drape (not shown).
- the sterile drape is configured in a matter equivalent to the configurations known to those knowledgeable in the field.
- Sterile adapter assembly 250 is a single use product. Therefore, the portion of the mechanical interface implemented in sterile adapter assembly 250 includes a minimal number of parts, as described more completely below.
- a transmission unit of surgical instrument 260 has multiple parallel input shafts. Due to manufacturing variations and tolerances, not all of these input shafts are or can be perfectly parallel or precisely located. For this reason, the mechanical interface must accommodate shaft angular and planar misalignment during the process of engaging surgical instrument 260 to instrument manipulator assembly 240.
- the mechanical interface couples surgical instrument 260 to the drive motors in instrument manipulator assembly 240 with very little, effectively zero, instrument tip motion during the instrument engagement process. As explained more completely below, until surgical instrument 260 is engaged with the motors in instrument manipulator assembly 240, instrument tip motion is inhibited. In addition, the distal end of surgical instrument 260 does not extend beyond the distal end of the cannula until the backlash in the mechanical interface has been minimized.
- a controller 290 is coupled to a surgeon's control console (not shown) and to patient-side cart 210. Controller 290 represents the various controllers in system 200. Controller 290 sends control commands to the surgical instrument 260 in response to control commands. The control commands are based on movements of masters in a surgeon's control console by a surgeon. A display module in system controller 290 also updates a stereoscopic view of the surgical site generated by a display device in the surgeon's control console as slave surgical instrument 260 moves in response to the control commands.
- controller 290 may be implemented in practice by any combination of hardware, software that is executed on a processor, and firmware. Also, its functions, as described herein, may be performed by one unit or divided up among different components, each of which may be implemented in turn by any combination of hardware, software that is executed on a processor, and firmware. When divided up among different components, the components may be centralized in one location or distributed across system 200 for distributed processing purposes.
- a processor should be understood to include at least a logic unit and a memory associated with the logic unit.
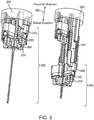
- Figs. 3A and 3B are illustrations of four surgical device assemblies 300 mounted on entry guide manipulator 230.
- surgical device assemblies 300 are positioned at an initial position, e.g., a first location.
- the mechanical interface includes a disk stack between a motor in instrument manipulator assembly 240 and a shaft in the transmission unit of surgical instrument 260.
- a first preload force is applied on the disk stack, e.g., a first predetermined force is applied on the disk stack.
- the mechanical interface may have some backlash because the first preload force is not sufficient to clamp the disks in the disk stack tightly enough together to prevent relative motion between the disks in the mechanical interface.
- the design of disks in the disk stack in the mechanical interface in combination with the first preload force ensures that the disks in the disk stack remain engaged, e.g., partially coupled, until the backlash is minimized.
- the disks in the mechanical interface have zero backlash up to a first torque level, e.g., 0.13 N-m (1.17 in-lbf) assuming a friction coefficient of 0.1.
- a first torque level e.g. 0.13 N-m (1.17 in-lbf) assuming a friction coefficient of 0.1.
- the first torque level there may be a known small backlash, for example 1.13 degrees. Since, as described more completely below, a force sufficient to spin the disks to overcome friction and dynamically mate the disks quickly is used, this force typically provides more than the first torque level. In this instance, the disks in the mechanical interface have non-zero backlash. Thus, the mechanical interface is said to have non-zero backlash in this instance.
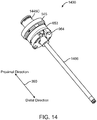
- Arrow 390 defines the distal and proximal directions.
- the distal direction is towards patient 201 and away from master instrument manipulator 280.
- the proximal direction is away from patient 201 and towards master instrument manipulator 280.
- the preload force on the disk stack is automatically increased from the first preload force to a second preload force.
- the second preload force is an example of a second predetermined force.
- the second preload force reduces the backlash of the mechanical interface, i.e., the backlash between the disks in the disk stack, to zero for torque levels used in surgical procedures.
- the second preload force is a high preload force, e.g., 10.2309 Newtons (2.3 lbf).
- the disks in the mechanical interface, and hence the mechanical interface have zero backlash at torque levels used in surgical procedures.
- the mechanical interface has zero backlash for torque levels up to 0.55 Newton-meters (N-m) (4.9 in-lbf).
- N-m Newton-meters
- a surgically useful torque may be 0.5N-m (4.425 in-lbf), and so the mechanical interface has zero backlash for torque levels used in surgical procedures in this aspect.
- the control of the backlash is in instrument manipulator assembly 240.
- the backlash was controlled in a sterile adapter assembly that was disposable, which in one instance required that the sterile adapter assembly include injection-molded parts that had resilient properties. Moving control of the backlash into instrument manipulator assembly 240 allows use of machined parts, and so allows reduction of the backlash.
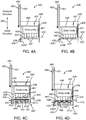
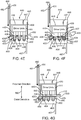
- Figs. 4A to 4G are block diagrams that illustrate the mounting of a sterile adapter assembly and a surgical instrument on a surgical instrument manipulator assembly. Other aspects illustrated in Figs. 4A to 4G include operation of a preload mechanism to reduce backlash, instrument removal lockout, sterile adapter removal lockout, preload release, and automatic preload reset. Figs. 4A to 4G are not to scale. Arrow 390 in Figs. 4A and 4G shows the proximal and distal directions in each of Figs. 4A to 4G .
- Fig. 4A shows a surgical instrument manipulator assembly 440 affixed to insertion assembly 431.
- instrument manipulator assembly housing 448 is fixedly attached to a distal end of insertion assembly 431, and so instrument manipulator assembly housing 448 moves with movement of insertion assembly 431.
- a motor pack 446 within instrument manipulator assembly housing 448 can move on rail 439. Motor pack 446 can move in the distal and proximal directions relative to instrument manipulator assembly housing 448. Motor pack 446 is coupled to instrument manipulator assembly housing 448 by a return spring 447.
- Motor pack 446 is movably coupled to insertion assembly 431 by preload assembly 480.
- Preload assembly 480 rides on a preload track in insertion assembly 431. As explained more completely below, as preload assembly 480 moves in the distal direction, preload assembly 480 provides a longitudinal force in the distal direction on motor pack 446.
- Preload assembly 480 includes a preload release button 482.
- Motor pack 446 includes a plurality of drive units 441.
- Plurality of drive units 441 includes a plurality of drive motors and a plurality of drive output assemblies. Each drive motor in the plurality of drive motors is coupled to a corresponding drive output assembly 443 in the plurality of drive output assemblies.
- Drive output assembly 443 includes a preload spring assembly and a drive output disk 445.
- Drive output assembly 443 also includes a low backlash coupler positioned between the preload spring assembly and drive output disk 445.
- Drive output disk 445 is coupled to the low backlash coupler by a set of input pins.
- drive output disk 445 is a cylindrical disk that includes a distal end surface. The distal end of each drive output disk 445 has a drive interface.
- the drive interface includes drive dogs and alignment elements.
- the drive dogs extend in a distal direction from the distal end surface.
- Each drive dog includes a first portion comprising a three-dimensional structure, e.g., a three-dimensional rectangle, which extends from the distal end surface and a second portion extending from the first portion.
- the second portion of the drive dog includes two opposing second portion side surfaces, and each of the second portion side surfaces includes a curved surface.
- the curved surface is a portion of a circular section, e.g., a portion of an outer surface of a cylinder.
- Motor pack 446 includes a plurality of hard-stops 437 configured to extend from a distal face of motor pack 446, and motor pack 446 also includes a release latch inhibit stop 438. Release latch inhibit stop 438 extends in the distal direction from one side of motor pack 446.
- a release latch 435 is mounted in a wall of instrument manipulator assembly housing 448.
- a latch pin 435P is coupled to a proximal portion of release latch 435.
- Fig. 4A shows instrument manipulator assembly 440 with the preload released, e.g., motor pack 446 is at a fully withdrawn position.
- return spring 447 retracts motor pack 446 within instrument manipulator assembly housing 448 so that the plurality of drive output disks including drive output disk 445 do not extend from a distal face of instrument manipulator assembly housing 448.
- the distal face of motor pack 446 is at position 432, which is the fully withdrawn position.
- controller 290 when motor pack 446 is located at fully withdrawn position 432, controller 290 causes insertion assembly 431 to move the preload track on which preload assembly 480 rides. The movement of the preload track results in preload assembly 480 applying a longitudinal force on motor pack 446.
- the longitudinal force on motor pack 446 moves motor pack 446 distally relative to instrument manipulator assembly housing 448 to position 433 so that the plurality of drive output disks including drive output disk 445 extend from the distal face of instrument manipulator assembly housing 448, as illustrated in Fig. 4B .
- return spring 447 is stretched from its initial state when motor pack 446 was at position 432.
- a surgical device interface element 450 e.g., a sterile adapter, could be mounted on instrument manipulator assembly 440 configured as shown in Fig. 4B .
- mounting the surgical device interface element 450 in this configuration requires compressing the plurality of preload spring assemblies including the preload spring assembly in drive output assembly 443 during the mounting process.
- preload release button 482 is activated so that the first longitudinal force applied on motor pack 446 by preload mechanism 408 is released. Consequently, return spring 447 pulls motor pack 446 to fully withdrawn position 432, as illustrated in Fig. 4A .
- tongues on one end of surgical device interface element 450 are positioned in grooves in instrument manipulator assembly housing 448 and the other end of surgical device interface element 450 is moved in the proximal direction until that other end engages with release latch 435 as shown in Fig. 4C .
- release latch 435 releases surgical device interface element 450, and surgical device interface element 450 can be removed from instrument manipulator assembly 440.
- release latch 435 is inhibited by release latch inhibit stop 438 until after preload release button 482 is pressed, e.g., is activated.
- a surgical device interface element 450 ( Fig. 4C ) is mounted on the distal face of instrument manipulator assembly 440.
- surgical device interface element 450 includes a frame 451 and a movable body 451C.
- Moveable body 451C can move in the proximal and distal directions within frame 451.
- a plurality of intermediate disks is mounted in moveable body 451C so that each of the plurality of intermediate disks can rotate relative to frame 451.
- each intermediate disk in the plurality of disks is the same, and so intermediate disk 453 is representative of each of the plurality of intermediate disks.
- Each intermediate disk 453 of the plurality of intermediate disks includes an intermediate driven interface 455, a first intermediate disk interface, and an intermediate drive interface 456, a second intermediate disk interface.
- Intermediate driven interface 455 is opposite and removed from intermediate drive interface 456.
- intermediate driven interface 455 includes a first alignment receptacle and drive dog receptacles.
- Intermediate drive interface 456 includes drive dogs and an engagement structure.
- Each of the drive dog receptacles of the intermediate driven interface is positioned so that each of the drive dog receptacles of the intermediate driven interface is bisected by a first plane.
- Each of the drive dogs of the intermediate drive interface is positioned so that each of the drive dogs of the intermediate drive interface is bisected by a second plane.
- the first plane is perpendicular to the second plane.
- Each of the drive dog receptacles of the intermediate driven interface includes a first portion comprising opposed sidewalls extending from the outer surface into the intermediate disk, a second portion comprising a bottom surface, and a third portion extending from the first portion to the second portion.
- the third portion includes two opposing third portion side surfaces, where each third portion side surface includes a sloped surface.
- Each of the drive dogs of the intermediate drive interface includes a first portion and a second portion extending from the first portion.
- the first portion is a three-dimensional structure, e.g., a three-dimensional rectangle.
- the second portion includes two opposing second portion side surfaces, where each second portion side surface includes a curved surface.
- the engagement structure includes an open three-dimensional structure extending in a distal direction from the distal surface of the intermediate disk.
- Movable body 451C also includes a plurality of hard stop receptacles 457.
- Plurality of hard stop receptacles 457 extend from a proximal face of movable body 451C in a distal direction into movable body 451C.
- instrument manipulator assembly 440 includes a sensor that sends a signal to controller 290 when surgical device interface element 450 is mounted on instrument manipulator assembly 440.
- controller290 causes insertion assembly 431 to move the preload track on which preload assembly 480 rides so that preload assembly 480 is reset and so that preload assembly 480 automatically applies the longitudinal force on motor pack 446.
- the longitudinal force on motor pack 446 moves motor pack 446 distally relative to instrument manipulator assembly housing 448 to position 433.
- each drive output disk 445 of the plurality of drive output disks contacts a corresponding intermediate driven interface 455 of the plurality of intermediate driven interfaces of the plurality of intermediate disks and in turn, each intermediate disk 453 contacts movable body 451C.
- movable body 451C moves distally as far as possible within frame 451, further motion of drive output disk 445 in the distal direction is inhibited.
- surgical device interface element 450 When surgical device interface element 450, sometimes referred to as a surgical device interface, is first mounted on instrument manipulator assembly 440, the elements of intermediate driven interface 455 may not be aligned with corresponding elements of the drive interface on drive output disk 445. If the elements of disks 453 and 445 are not aligned, the two disks are partially coupled together by features in the drive and intermediate driven interfaces, but the two disks are not coupled, e.g., mated, to each other.
- controller 290 sends a signal to instrument manipulator assembly 440 to rotate drive output disk 445.
- rotation of intermediate disk 453 is inhibited and drive output disk 445 is rotated until the drive interface of drive output disk 445 mates with intermediate driven interface 455 of intermediate disk 453.
- the partial coupling of the elements of the drive interface on drive output disk 445 with the corresponding elements of intermediate driven interface 455 on intermediate disk 453 assures that the two disks remain partially coupled under the preload force as the two disks rotate.
- another sensor detects a change in a height of the disk stack and sends a signal to controller 290 to stop the rotation of drive output disk 445.
- An alternative technique to sense the mating of the two disks is described below. When the two disks are mated, the preload force is reduced, because the height of the disk stack is reduced.
- release latch inhibit stop 438 extends in front of latch pin 435P that is coupled to release latch 435.
- latch pin 435P contacts release latch inhibit stop 438, which prevents releasing surgical device interface element 450, because release latch 435 cannot be pivoted enough to release surgical device interface element 450.
- surgical device interface element 450 cannot be dismounted.
- a surgical instrument 460 can be coupled to instrument manipulator assembly 440 in either the configuration of Fig. 4B , or the configuration of 4C. For purposes of an example, the configuration of Fig. 4C is used.
- surgical instrument 460 includes a body 465 and a main tube 467.
- Main tube 467 extends distally from body 465.
- Body 465 includes a driven disk receptacle 463, a shaft 466, and a driven disk 464.
- Shaft 466 and driven disk 464 are part of a transmission unit that transmits received torque through the instrument to one or more components of the instrument.
- a proximal end of shaft 466 extends into driven disk receptacle 463, and driven disk 464 is mounted on the proximal end of shaft 466 so that driven disk 464 is positioned in driven disk receptacle 463.
- Driven disk 464 includes a driven interface that interfaces with intermediate drive interface 456 of intermediate disk 453.
- the driven interface of driven disk 464 includes an engagement receptacle, drive dog receptacles, and a rotation disable element.
- the drive dog receptacles are equivalent to those described above.
- the rotation disable element includes a rotation locking mechanism. Upon engagement of the rotation disable element, the rotation locking mechanism engages driven disk receptacle 464 and prevents rotation of driven disk 464.
- each driven disk 464 pushes a corresponding intermediate disk 453 in surgical device interface element 450 proximally so that intermediate disk 453 can rotate freely. This increases the preload force on the disk stack.
- the elements of intermediate drive interface 456 may not be aligned with corresponding elements of the driven interface on driven disk 464. If the elements of the two disks 453 and 464 are not aligned, the two disks are partially coupled together by features in intermediate drive interface 456 and in the driven interface, but the two disks are not mated to each other.
- an engagement structure on intermediate drive interface 456 of intermediate disk 453 engages a rotation disable element on driven disk 464 of surgical instrument 460.
- the rotation disable element includes a rotation locking mechanism. Upon engagement of the rotation disable element, the rotation locking mechanism engages driven disk receptacle 464 and prevents rotation of driven disk 464.
- instrument manipulator assembly 440 When surgical instrument 460 is coupled to instrument manipulator assembly 440, instrument manipulator assembly 440 detects the presence of surgical instrument 460, and sends a signal to controller 290. In response to the signal, controller 290 sends a signal to instrument manipulator assembly 440 to rotate drive output disk 445. As the intermediate drive interface 456 of intermediate disk 453 rotates with driven disk 464 fixed in place, each element on intermediate drive interface 456 rotates into alignment with the corresponding element of the driven interface of driven disk 464 and mates with the corresponding element. The coupling of intermediate drive interface 456 and the driven interface on driven disk 464 releases the rotation lock on driven disk 464. Thus, the stack of disks, disks 445, 453, and 464, rotates as a unit.
- the sensor When disks 453 and 464 are coupled, the sensor again detects a change in a height of the disk stack and sends a signal to controller 290 to stop the rotation of drive output disk 445.
- the preload force applied to the disk stack is referred to as a first longitudinal force, i.e., a first preload force.
- surgical device interface element 450 cannot be removed without releasing the preload.
- surgical instrument 460 could still be removed.
- preload assembly 480 moves distally along the preload track.
- preload assembly 480 causes motor pack 446 to move predetermined distance Zload plus an additional distance ⁇ so that motor pack 446 is at position 434.
- the movement of motor pack 446 the additional distance ⁇ compresses the preload spring assembly in each drive output assembly 443 of the plurality of drive output assemblies so that a second preload force is exerted on each drive output disk 545 in the plurality of drive output disks.
- the second preload force reduces any backlash between rotation of the motor shaft in drive units 441 and rotation of shaft 467 in surgical instrument 460 to less than 0.7 degrees before the distal end of surgical instrument 260 exits the cannula.
- the movement of motor pack 446 the additional distance ⁇ also further stretches return spring 447, and in addition inserts each of plurality of hard stops 437 into a corresponding hard stop receptacle in plurality of hard stop receptacles 457.
- Plurality of hard stops 437 prevents any proximal movement of moveable body 451C in surgical device interface element 450.
- the combination of plurality of hard stops 437 and plurality of hard stop receptacles 457 form a surgical instrument removal interlock and prevent removal of surgical instrument 460.
- plurality of hard stop receptacles 457 is illustrative only and is not intended to be limiting. In another aspect, plurality of hard stop receptacles 457 is not used. Instead, plurality of hard stops 437 contact a proximal surface of moveable body 451C and prevent movement of moveable body 451C in the proximal direction.
- preload release button 482 When pushed, preload release button 482 causes the longitudinal force on motor pack 446 to be released. Consequently, return spring 447 pulls motor pack 446 to fully withdrawn position 432.
- release buttons on surgical instrument 460 can be used to remove surgical instrument 460 from surgical device interface element 450 at any position of insertion assembly 431.
- release latch inhibit stop 438 is withdrawn, and release latch 435 can be used to disengage surgical device interface element 450 from instrument manipulator assembly 440 at any position of insertion assembly 431.
- the release of surgical device interface element 450 is inhibited until after preload release button 482 is pressed, e.g., release latch inhibit stop 438 inhibits the operation of release latch 435 until after preload release button 482 is pressed.
- the preload is automatically reset, as described above, the next time surgical device interface element 450 is installed and insertion assembly 431 is moved to the fully retracted position.
- Figs. 5 to 13 illustrate one aspect of installing the parts of surgical device assembly 300 to obtain the configuration illustrated in Fig. 3A .
- Fig. 5 illustrates the distal end of instrument manipulator assembly 240.
- Instrument manipulator assembly 240 includes a drive unit assembly 541 and a drive output unit 542.
- drive output unit 542 includes a plurality of drive output assemblies 543P, e.g., eight drive output assemblies.
- drive output assembly 543 refers to any one of the eight drive output assemblies. In one aspect, only six of the eight drive output assemblies are used.
- Drive output assembly 543 includes a low backlash coupler 544, sometimes referred to as coupler 544, and a drive output disk 545. See also Fig. 16A .
- a coupler that has a backlash of less than 0.3 degrees is considered a low backlash coupler.
- Drive output disk 545 is coupled to low backlash coupler 544 by a set of output pins. As explained more completely below, drive output disk 545 is a cylindrical disk that includes a distal end surface. The distal end of each drive output disk 545 has a drive interface 557. Drive interface 557 includes drive dogs and alignment elements. In Fig. 5 , the drive dogs and first and second alignment elements extend in the distal direction from the distal end surface (see Fig. 16C ) of drive output disk 545.
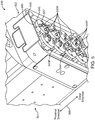
- Fig. 6 shows instrument manipulator assembly 240 affixed to insertion assembly 331 that in turn is attached to an insertion axis base assembly 632.
- Insertion axis base assembly 632 includes a motor and power electronics to move insertion assembly 331.
- Sterile adapter assembly 250 includes a sterile adapter frame 651 and a sterile drape (not shown). The sterile drape is fixedly attached to sterile adapter frame 651.
- Sterile adapter assembly 250 is an example of a surgical device interface element.
- Sterile adapter frame 651 is an example of a surgical device interface element body.
- a surgical device interface element is a structure that includes a mechanical interface between a drive interface of a drive system and a driven interface of a surgical instrument.
- a plurality of tongues 652A, 652B extends from a first end 651A of sterile adapter frame 651.
- First end 651A is sometimes referred to as a closed end of sterile adapter assembly 250 and of sterile adapter frame 651.
- Each tongue 652A, 652B is configured to mate with a corresponding groove 647A, 647B in a plurality of grooves in drive output unit 542.
- a second end 651B of sterile adapter frame 651 includes a lip 654 that is engaged by a sterile adapter release latch 635 of drive output unit 542 when sterile adapter frame 651 is mounted on drive output unit 542.
- Second end 651B is sometimes referred to as an open end of sterile adapter assembly 250 and of sterile adapter frame 651.
- sterile adapter frame 651 includes a movable body 651C.
- Moveable body 651C can move in the proximal and distal directions within sterile adapter frame 651.
- a plurality of intermediate disks 653P is mounted in a plurality of intermediate disk receptacles of movable body 651C so that each intermediate disk can rotate relative to sterile adapter frame 651 and relative to movable body 651C.
- plurality of intermediate disks 653P is rotatably mounted in sterile adapter frame 651.
- Intermediate disk 653 is representative of each intermediate disk in plurality of intermediate disks 653P.
- Intermediate disk 653 is a representative intermediate disk.
- Each intermediate disk 653 includes an intermediate driven interface 655 on a first side of intermediate disk 653 and an intermediate drive interface 756 ( Fig. 7 ) on a second side of intermediate disk 653. The first side is opposite and removed from the second side.
- Intermediate driven interface 655 of each intermediate disk 653 is visible in Fig. 6 with intermediate disk 653 mounted in an intermediate disk receptacle of movable body 651C.
- Intermediate driven interface 655 is configured to mate with a drive interface 557 on drive output disk 545 in drive output unit 542.
- each tongue 652A, 652B is inserted into a corresponding groove 647A, 647B in drive output unit 542. See Fig. 7A .
- Sterile adapter frame 651 is then rotated until lip 654 is engaged by sterile adapter release latch 635.
- elements 652A, 652B as tongues and referring to elements 647A, 647B as grooves is illustrative only and is not intended to be limiting.
- elements 652A, 652B could be described as tenons or projections
- elements 674A, 647B could be described as mortises or cavities.
- sterile adapter frame 651 When sterile adapter frame 651 is latched to drive output unit 542, as illustrated in Fig. 7B , plunger 546 of instrument manipulator assembly 240 is depressed. When plunger 546 is depressed, a signal is generated that indicates to controller 290 the presence of sterile adapter assembly 250.
- controller 290 in surgical system 200 first energizes an automatic preload reset mechanism (see Fig. 24B ) that generates a preload force on each drive output disk 545 of plurality of drive output disks 545P ( Fig. 5 ), and then controller sends a signal to instrument manipulator assembly 240 to rotate each drive output disk 545 of plurality of drive output disks 545P.
- an automatic preload reset mechanism see Fig. 24B
- controller sends a signal to instrument manipulator assembly 240 to rotate each drive output disk 545 of plurality of drive output disks 545P.
- each drive output assembly 543 in drive output unit 542 is spring-loaded and is automatically positioned so that a preload force is exerted on each drive output disk 545 after sterile adapter assembly 250 is mounted on instrument manipulator assembly 240.
- the preload force pushes against drive output disk 545 and against a corresponding intermediate driven interface 655 of intermediate disk 653 in sterile adapter frame 651.
- a disk stack including disks 545 and 653, i.e., a first disk and a second disk, which are partially coupled has a first height. After the preload force is applied to this disk stack, the controller rotates drive output disk 545.
- Fig. 7B also shows a preload assembly 780 that is coupled to a motor pack in drive unit assembly 541.
- Preload assembly 780 is a more detailed example of one aspect of preload assembly 480.
- Preload assembly 780 rides on a preload track (see preload track 2225 in Fig. 22A ) in insertion assembly 331.
- Instrument manipulator assembly housing 741 and instrument sterile adapter assembly 250 are fixedly attached to a distal end insertion assembly 331 and move as a unit with the distal end of insertion assembly 331.
- a motor pack within instrument manipulator assembly housing 741 can move in the distal and proximal directions relative to instrument manipulator assembly housing 741.
- preload assembly 780 moves in the distal direction
- preload assembly 780 provides a longitudinal force in the distal direction on the motor pack.
- the longitudinal force results in compression of springs in drive output assembly 543 that generates a second preload force.
- the second preload force reduces any backlash to less than 0.7 degrees before the distal end of surgical instrument 260 exits the cannula.
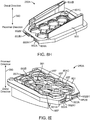
- an intermediate drive interface 756 on the distal side of intermediate disk 653 of plurality of intermediate disks 653P is visible.
- an instrument insertion skid plate 755B which extends from an inner side surface of sterile adapter frame 651.
- instrument insertion skid plate 755A that extends from an inner side surface on the opposite side of sterile adapter frame 651.
- a side 751B, sometimes called lip 751B of movable body 651C is also visible.
- Side 751A is shown in Fig. 11 .
- Figs. 8A to 8I illustrate an alternative example, sterile adapter assembly 250A, of surgical device interface element 450 and of sterile adapter assembly 250.
- Sterile adapter assembly 250A includes a sterile adapter frame 851 and a sterile drape (not shown). The sterile drape is fixedly attached to sterile adapter frame 851.
- Sterile adapter frame 851 is an example of a surgical device interface element body.
- a plurality of grooves 852A, 852B extend into a first end 851A of sterile adapter frame 851 to form first and second lips 852A1, 852B1.
- First end 851A is sometimes referred to as a closed end of sterile adapter assembly 250A and of sterile adapter frame 851.
- the depth and size of each groove 852A, 852B is configured to allow a surface of a corresponding hook 847A, 847B on a distal end of ventral latch assembly 847 to engage a corresponding lip 852A1, 852B1.
- Each of first and second lips 852A1, 852B1 includes a first surface and a second surface.
- the second surface is opposite the first surface, e.g., the first surface is a proximal surface and the second surface is a distal surface.
- the second surface of the lip is longer than the first surface of the lip in a direction perpendicular to axis 890.
- a third surface of the lip extends between the first and second surfaces, and is tapered in view of the different lengths of the first and second surfaces. In one aspect, the third surface is a beveled surface.
- a second end 851B of sterile adapter frame 851 includes a lip 854 that is engaged by a lip 835L that extends inward towards axis 890 from a distal portion of a sterile adapter release latch 835 of drive output unit 542A when sterile adapter assembly 250A is mounted on drive output unit 542A.
- Second end 851B is sometimes referred to as an open end of sterile adapter assembly 250A and of sterile adapter frame 851.
- Lip 854 includes a first surface and a second surface.
- the second surface is opposite the first surface, e.g., the first surface is a proximal surface and the second surface is a distal surface.
- the second surface of lip 854 is longer than the first surface of lip 854 in a direction perpendicular to axis 890.
- a third surface of lip 854 extends between the first and second surfaces, and is tapered in view of the different lengths of the first and second surfaces. In one aspect, the third surface is a beveled surface.
- sterile adapter frame 851 includes a movable body 851C.
- Moveable body 851C can move in the proximal and distal directions within sterile adapter frame 851.
- An instrument insertion skid plate 855A extends from an inner side surface of sterile adapter frame 851.
- a side 851C1 sometimes called a lip 851C1 of movable body 851C is also visible.
- movable body 851C The features and operation of movable body 851C are the same as the features and operation of movable body 651C, and so the description of the features and operation of moveable body 651C are not repeated here for movable body 851C. Also, the mounting of a surgical instrument on sterile adapter 250A is the same as described with respect to sterile adapter 250, and so that description is not repeated for sterile adapter 250A.
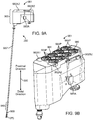
- sterile adapter assembly 250A To mount sterile adapter assembly 250A on instrument manipulator assembly 240, sterile adapter assembly 250A is moved axially in the proximal direction along longitudinal axis 890, i.e., the direction indicated by arrow 891 ( Figs. 8A and 8B ) until sterile adapter assembly is engaged by features of drive output unit 542A, as described more completely below.
- Figs. 8B to 8D are cut-away drawings that illustrate the elements using in mounting sterile adapter assembly 250A to drive output unit 542A.
- Drive output unit 542A is similar to drive output unit 542 with the exception of latching mechanism 860 for sterile adapter assembly 250A that is included in drive output unit 542A.
- a frame 842F of drive output unit 542A includes a first sterile adapter alignment element 845A, sometimes referred to as a first alignment element, extending from the distal face of frame 842F and a second sterile adapter alignment element 845B, sometimes referred to as a second alignment element also extending from the distal face of frame 842F.
- Sterile adapter alignment element 845A is adjacent but inboard of ventral latch assembly 847, while sterile adapter alignment element 845B is adjacent but inboard of sterile adapter release latch 835.
- first sterile adapter alignment element 845A enters, e.g., engages, first sterile adapter alignment receptacle 853A ( Figs. 8H and 8I ) in sterile adapter frame 851.
- second sterile adapter alignment element 845B enters, e.g., engages, second sterile adapter alignment receptacle 853B in sterile adapter frame 851.
- the alignment elements and receptacles are configured to align sterile adapter assembly 250A so that further motion of sterile adapter assembly 250A in the proximal direction causes latching mechanism 860 to engage sterile adapter assembly 250A.
- First and second alignment elements 845A, 845B are an example of a plurality of sterile adapter alignment elements.
- First and second alignment receptacles 853A, 853B are an example of a plurality of alignments receptacles.
- drive output unit 542A, and so instrument manipulator assembly 240 in this aspect, includes a plurality of sterile adapter alignment elements
- sterile adapter assembly 250A includes a plurality of alignment receptacles.
- the plurality of receptacles could be formed in drive output unit 542A, and the plurality of alignment elements could extend from the proximal face of sterile adapter frame 851.
- a tapered surface of hook 847A contacts the tapered surface of lip 852A1 of sterile adapter assembly 250A
- a tapered surface of a tapered surface of hook 847B contacts the tapered surface of lip 852B1 of sterile adapter assembly 250A
- a tapered surface of lip 835L of sterile adapter release latch 835 contacts the tapered surface of lip 854 of sterile adapter assembly 250A.
- sterile adapter 250A is mounted on drive output unit 542A, as illustrated in Fig. 8D , by only moving sterile adapter assembly 250 along axis 890 toward the distal face of drive output unit 542A.
- Figs. 8E to 8G are cut-away drawings illustrating sterile adapter latching mechanism 860. Components that are not needed to understand sterile adapter latching mechanism 860 are not included in Figs. 8E to 8G .
- Sterile adapter latching mechanism 860 is movably coupled to frame 842F of drive output unit 542A.
- Sterile adapter latching mechanism 860 includes sterile adapter release latch 835, push rod 844, and ventral latch assembly 847.
- Push rod 844 couples sterile adapter release latch 835 to ventral latch assembly 847 so that motion of latch 835 is transferred to ventral latch assembly 847.
- the sterile adapter latching mechanism includes a first latch assembly, a second latch assembly, and a push rod coupling the first latch assembly to the second latch assembly.
- Sterile adapter release latch 835 sometimes referred to as latch 835, includes a proximal end portion - an example of a first end portion - and a distal end portion-an example of a second end portion opposite from the first end portion.
- a latch pin 835P ( Fig. 8B ) is coupled to an interior surface of the proximal end portion of latch 835.
- Latch pin 835P extends inward from the interior surface of latch 835.
- Latch pin 835P is equivalent to latch pin 435 and latch pin 2635P, and so the description of those latch pins is directly applicable to latch pin 835P, and conversely.
- Lip 835L extends inward from the distal portion of latch 835.
- sterile adapter release latch 835 is pivotally connected to frame 842F.
- the pivotal connection is spring loaded to maintain latch 835 in what is referred to as the engaged position, or engaged state in the absence of a force that causes latch 835 to pivot.
- a first end of push rod 844 is pivotly connected to the proximal end portion of latch 835 so that when the proximal portion of latch 835 is pushed inward, e.g., pushed in a first direction, the motion is transferred to push rod 844.
- a proximal end portion, e.g., a first end portion, of ventral latch assembly 847 is pivotally connected to frame 842F.
- the connection to frame 842F is spring-loaded to maintain ventral latch assembly 847 in what is referred to as the engaged position, or engaged state in the absence of a force that causes ventral latch assembly 847 to pivot.
- Two legs extend distally from the proximal end portion of ventral latch assembly 847. At the distal end of each leg, e.g., at the distal end of ventral latch assembly 847, is a hook, i.e., one of hook 847A and hook 847B.
- Push rod 844 is pivotly connected to one leg of ventral latch assembly 847 between the proximal end portion of latch assembly 847 and the distal end of the leg.
- ventral latch assembly 847 is implemented as a Class 3 lever, the effort is between the fulcrum (pivotal connection to frame) and the load (hooks 847A and 847B).
- a Class 3 lever is illustrative only and is not intended to be limiting. In other aspects, a Class 1 lever or a Class 2 lever could be used.
- the load is between the fulcrum and the effort, and for a Class 1 lever, the fulcrum is between the effort and the load.
- both sterile adapter release latch 835 and ventral latch assembly 847 are in a steady-state position, the engaged position, with a longitudinal axis of each aligned with longitudinal axis 890, i.e., substantially parallel to axis 890.
- substantially parallel means parallel within manufacturing tolerances.
- an external force 892 is applied to the proximal end of latch 835 ( Fig. 8G )
- a force is applied to lip 835L
- the proximal end portion of latch 835 pivots inward toward axis 890 and the distal end portion of latch 835 pivots outward.
- ventral latch assembly 847 pivot outward.
- external force 892 causes the two latch assemblies to move to the disengaged position, e.g., move to a second state different from the first state.
- Fig. 8H is bottom perspective view of sterile adapter assembly 250A.
- Fig. 8I is a top perspective view of sterile adapter assembly 250A. While it is not shown in Figs. 8H and 8I , an intermediate disk 653 is mounted in each of the plurality of intermediate disk receptacles in movable body 851C.
- a plurality of intermediate disks is mounted in the plurality of intermediate disks receptacles of movable body 851C so that each intermediate disk can rotate relative to sterile adapter frame 851 and to movable body 851C.
- a plurality of intermediate disks is rotatably mounted in sterile adapter frame 851.
- the plurality of intermediate disks is the same as plurality of intermediate disks 653P, and so the characteristics of the plurality of intermediate disks are not repeated here. Also, each intermediate disk in the plurality of disks mounted in movable body 851C is the same as intermediate disk 653 (see Fig. 17B ), and so the description of intermediate disk 653 is not repeated with respect to sterile adapter assembly 250A.
- the plurality of hard stop receptacles 857 of sterile adapter assembly 250A is the same as and works in the same way as described for plurality of hard stop receptacles 1757, and so that description is not repeated here.
- Sterile adapter assembly 250A has an intermediate disk hard stop 861 associated with each intermediate disk.
- Each intermediate disk hard stop 861 of sterile adapter assembly 250A is the same as and works in the same way as described for intermediate disk hard stop 1761 ( Fig. 17B ), and so that description is not repeated here
- Figs 9A is a more detailed illustration of surgical instrument 260 in one aspect.
- Surgical instrument 260 in this aspect, includes a driven interface assembly 961, a transmission unit 965, a main tube 967, a parallel motion mechanism 968, a wrist joint 969, and an end effector 970.
- Wrist joint 969 is described, for example, in U.S. Patent Application No. US 2003/0036748 A1 (filed Jun. 28, 2002 and published Feb. 20, 2003 disclosing "Surgical Tool Having Positively Positionable Tendon-Activated Multi-Disk Wrist Joint.
- Parallel motion mechanism 968 is described, for example, in U.S. Patent No. US 7,942,868 B2 (filed Jun. 13, 2007 , disclosing "Surgical Instrument With Parallel Motion Mechanism").
- driven interface assembly 961 includes a plurality of driven disks 964P.
- Plurality of driven disks 964P is an example of driven interface elements.
- Driven disk 964 is representative of each driven disk of plurality of driven disks 964P.
- Driven disk 964 is mounted on a shaft of transmission unit 965.
- each driven disk 964 is mounted in a receptacle in a body of driven interface assembly 961 (see Fig. 19B ).
- Mechanical components e.g., gears, levers, gimbals, cables etc.
- transmission unit 965 transfer torques from plurality of driven disks 964P to cables, wires, and/or cable, wire, and hypotube combinations that run through main tube 967 to control movement of parallel motion mechanism 968, wrist joint 969, and end effector 970.
- Main tube 967 although substantially rigid, can be bent slightly between transmission unit 967 and entry guide 270. This bending allows the instrument body tube bores in entry guide 270 to be spaced closer together than the size of the transmission units would otherwise allow. The bending is resilient so that main tube 967 assumes its straight shape when surgical instrument 260 is withdrawn from guide tube 270 (the main tube may be formed with a permanent bend, which would prevent instrument body roll).
- Driven interface assembly 961 has on each side a pair of mounting wings (962A1, 962B1) and (962A2, 962B2). Also, on each side of transmission unit 965 is a release button 963A, 963B. Mounting wing 962B2 and release button 963B are shown in Fig. 10 .
- Fig. 11 is a cutaway view of Fig. 10 with the outer side surface of sterile adapter frame 651 removed.
- Mounting wing 962A1 is resting on skid plate 755A that extends from a first sidewall of sterile adapter frame 651. As surgical instrument 260 is slid on skid plate 755A towards parking slot 1155A, which is at the opposite end of skid plate 755A, ( Fig. 11 ), the top surface of first mounting wings 962A1, 962A2 contacts the bottom edge of lip 751A, 751B, which moves movable body 651C in the proximal direction ( Fig. 12 ).
- proximal motion of movable body 651C depresses plunger 1246 of instrument manipulator assembly 240 in the proximal direction, which in turn generates a signal to controller 290 that surgical instrument 260 is being loaded unto sterile adapter assembly 250.
- first mounting wings 962A1 When mounting wing 962A1 reaches parking slot 1155A at the closed end of sterile adapter frame 651 ( Fig. 13 ), the top surface of first mounting wings 962A1, 962A2 no longer contacts the bottom edge of lip 751A, 751B. Consequently, the preload force on movable body 651C moves body 651C in the distal direction ( Fig. 13 ) and locks first mounting wing 962A1 in place.
- second mounting wing 962B1 rests on a flat portion of skid plate 755A near the open end of sterile adapter frame 651.
- Each intermediate disk 653 in sterile adapter frame 651 is being pushed axially in the distal direction by the preload force on the plurality of drive output disks 545P.
- plurality of intermediate disks 653P transfer the first preload force to movable body 651C so that the preload force is applied to mounting wing 962A1.
- This preload force is selected so that surgical instrument 260 can be easily slid into sterile adapter frame 651 and so that a small preload force is maintained on all the disks.
- instrument manipulator assembly 240 When surgical instrument 260 is mounted in sterile adapter assembly 250, instrument manipulator assembly 240 detects the presence of surgical instrument 260 and sends a signal to controller 290 that indicates the presence of surgical instrument 260. In response to the signal, controller 290 in surgical system 200 sends the signal to instrument manipulator assembly 240 to rotate each drive output disk 545 of plurality of drive output disks 545P.
- each drive output assembly 543 in drive output unit 542 is spring-loaded and is automatically positioned so that a preload force is exerted on each drive output disk 545 after sterile adapter assembly 250 is mounted on instrument manipulator assembly 240.
- the preload force pushes against drive output disk 545 and against a corresponding intermediate driven interface 655 of intermediate disk 653 in sterile adapter frame 651.
- a disk stack including disks 964, 653, and 545, i.e., a third disk, the second disk, and the first disk, which are partially coupled has a third height.
- each driven disk 964 in driven interface assembly 961 pushes a corresponding intermediate disk 653 in sterile adapter assembly 250 proximally so that intermediate disk 653 can rotate freely.
- an engagement structure on intermediate drive interface 756 of intermediate disk 653 engages a rotation disable element 1980 (see Fig. 19A ) on driven disk 964 of surgical instrument 260, which prevents rotation of driven disk 964 in driven interface assembly 961.
- each element on intermediate drive interface 756 rotates into alignment with the corresponding element of driven interface 980 of driven disk 964 and mates with the corresponding element.
- the coupling of intermediate drive interface 756 and driven interface 980 releases the rotation lock on driven disk 964.
- the stack of disks rotates as a unit.
- the height of the disk stack has a fourth height, and the fourth height is less than the third height, a sensor in instrument manipulator assembly 240 detects this change in height and sends a signal to controller to stop the rotation of drive output disk 545.
- the sensor in instrument manipulator assembly 240 that detects changes in the height of the disk stack can be a mechanical sensor, an optical sensor, an inductive sensor, a capacitive sensor, etc.
- Fig. 14 is an illustration of disk stack 1400 when drive output disk 545 is coupled to intermediate disk 653, and intermediate disk 653 is coupled to driven disk 964.
- coupled means that all of the alignment features on two interfacing disks are aligned so that the two disks are mated, i.e., fully coupled.
- the two interfacing disks are partially coupled. The preload force is selected so that despite some backlash, the two partially coupled disks remain in contact so that all the alignment features can be aligned and mated.
- Disk stack 1400 is the disk stack configuration referred to above with respect to Figs. 3A and 3B .
- Drive interface 557 of drive output disk 545 is mated to intermediate driven interface 655 of intermediate disk 653 and intermediate drive interface 756 of intermediate disk 653 is mated to driven interface 980 of driven disk 964.
- a high preload force i.e., a second preload force
- Low backlash coupler 544 compensates for spatial misalignment and transmits motion and torque to disk stack 1400.
- the design of drive dogs compensates for angular misalignment of the drive output disk 445 and the driven disk 964.
- Fig. 15A is an illustration of instrument manipulator assembly 240 with instrument manipulator assembly housing 741 removed. Also, there is a vertical cut showing the components in drive unit assembly 541.
- Instrument manipulator assembly 240 includes a motor pack 1541 that in turn includes a plurality of drive units 1500P and plurality of drive output assemblies 543P.
- Each drive unit 1500 of plurality of drive units 1500P includes an encoder 1501, a slotless brushless servomotor 1502, a compact Hall effects sensor 1503, and a planetary gearhead 1504.
- slotless brushless servomotor 1502 has a very high motor constant, and so servomotor 1502 is very efficient.
- the use of a slotless brushless servomotor is illustrative only and is not intended to limit the motors in plurality of drive units 1500P to this specific type of motor.
- a variety of motors can be used including brush type motors, stepper motors, etc.
- Each servomotor 1502 includes magnetic shielding to prevent torque ripple to adjacent servomotors in view of the compact configuration of the eight servomotors in motor pack 1541.
- Compact Hall effects sensor 1503 is used to detect the position of the permanent magnet in servomotor 1502. Hall effects sensor 1503 is used as a second encoder. An encoder-to-hall check compares the rotary positions reported by encoder 1501 and Hall effects sensor 1503. If the rotary positions are significantly different, something is wrong with encoder 1501, Hall effects sensor 1503, or the mechanism between them. Executing software in a controller immediately turns off the motors, when this check fails.
- Planetary gearhead 1504 is heavy duty and highly efficient (greater than 90%), and thus is easier to back-drive than typical gearheads.
- back drivable it is meant that the output shaft of the gearhead can be rotated with a relatively low torque, as compared to typical gearheads.
- Planetary gearhead 1504 has backlash, in one aspect, of less than one degree, and in another aspect has low backlash, e.g., 0.4 degrees.
- four of the planetary gearheads have a 28:1 input to output ratio and are referred to as standard planetary gearheads.
- four of the planetary gearheads have a 9 to 1 input to output ratio and are referred to as high-speed gearheads.
- a drive unit 1500 with a standard planetary gearhead is referred to as a standard drive unit.
- a drive unit 1500 with a high-speed planetary gearhead is referred to as a high-speed drive.
- Figs. 15B to 15E are illustrations of one example of planetary gearheads suitable for use in motor pack 1541.
- Fig. 15B is a side view of planetary gearhead 1504.
- Fig. 15C is a distal view of planetary gearhead 1504.
- Fig. 15D is a proximal view of a 28:1 planetary gearhead.
- Fig 15E is a proximal view of a 9:1 planetary gearhead.
- Table 1 One example of dimensions for the gearhead in Figs. 15B to 15E is given in Table 1.
- Figs. 16A to 16D are more detailed illustrations of drive output assembly 543 that is representative of each drive output assembly in plurality of drive output assemblies 543P in this aspect.
- Drive output assembly 543 includes a ball-spline 1603.
- a light preload spring 1601 e.g., a first preload spring, is mounted in a central lumen of ball-spline 1603, and has one end affixed to a proximal side of drive output disk 545.
- Light preload spring 1601 applies a first preload force to drive output disk 545 when spring 1601 is compressed.
- the first preload force is 2.22 Newtons (0.5 pounds force (Lbf)).
- a ball-spline nut 1604 is mounted is mounted on ball-spline 1603.
- Ball-spline nut 1604 slides proximally and distally along ball-spine 1603, i.e., slides in a first direction and in a second direction opposite to the first direction, while transferring torque/motion from ball-spline 1603.
- torque/motion is transferred to low backlash coupler 544, sometimes called flexure 544, through ball-spline 1603.
- Ball-spline 1603 transmits torque/motion, while allowing drive output assembly 543 to move along a longitudinal axis of ball-spline 1603.
- drive output assembly 543 moves in and out along ball-spline 1603 to facilitate the engagement or disengagement.
- Ball-spline 1603 has zero backlash for torque levels used in surgical procedures.
- Ball-spline nut 1604 is inserted in a housing 1605 on which heavy preload spring 1602, a second preload spring, is mounted.
- Heavy preload spring 1602 in combination with light preload spring 1601 applies a second preload force to drive output disk 545, when both springs are compressed.
- the second preload force is 10.2 Newtons (2.3 pounds force (Lbf))
- Flexure 544 is coupled to the drive unit by two pins that transmit torque from the drive unit to flexure 544. Flexure 544 is also coupled to drive output disk 545 by two pins. Thus, flexure 544 transfers torque from the drive unit to drive output disk 545.
- Fig. 16B is an end view of flexure 544.
- Flexure 544 has a central lumen 1640 that fits on a cylinder 1445C ( Figs. 14 and 16A ) extending proximally from a proximal surface of drive output disk 545.
- Flexure has four beams 1641A, 1641B, 1641C, and 1641D.
- a first end of each of four beams 1641A, 1641B, 1641C, and 1641D is connected to a body 1642 of flexure 544.
- a second end of each of four beams 1641A, 1641B, 1641C, and 1641D is connected to a cylinder 1643A, 1643B, 1643C, and 1643D, respectively, having a central bore.
- Beams 1641A, 1641B, 1641C, and 1641D are stiff in torsion about the axis through central lumen 1640, but flexible with respect to lateral offsets.
- Output pins driven by the drive unit are mounted in the central bores of cylinders 1643A, 1643B.
- Input pins of drive output disk 545 are mounted in central bores of cylinders 1643C, 1643D.
- Flexure 544 is a precision-machined one-piece part made of precipitation-hardened stainless steel 17-4 HI 150, in one aspect.
- the backlash of flexure 544 is determined by the mounting pin clearances between the central bore of the cylinder and the outer diameter of the input pin or the output pin.
- the backlash of surgical device assembly 300 is controlled solely by instrument manipulator assembly 240, in this aspect. This is in contrast to previous systems where the backlash was accounted for by an Oldham coupling in the prior art sterile adapter.
- the parts in the prior art sterile adapter were injection molded and so could not be made to the same precision as flexure 544.
- Controlling backlash in a reusable part of surgical device assembly 300 means that the backlash is consistent for each use of surgical device assembly 300 and is not dependent on the manufacturing tolerances of injection molded parts in a single-use disposable assembly, such as the prior art sterile adapter.
- Flexure 544 accommodates motion in two-degrees of freedom in the plane normal to the axis of central lumen 1640.
- Output pins coupled to beams 1641A, 1641B can move along axis 1690. The range of motion is limited by the gap between the outer surface of cylinder 1643A, 1643B and the outer surface of body 1642.
- input pins coupled to beams 1641C, 1641D can move along axis 1691, which is perpendicular to axis 1690. The range of motion is limited by the gap between the outer surface of the cylinder 1643C, 1643D and the outer surface of body 1642.
- 1691 to displace a beam 0.254 millimeters (0.010 inches) along one of axes 1690, 1691 takes 2.94 Newtons (0.66 Lbf) and results in 199.95 Megapascals (29,000 pounds per square inch) stress. At 11.3 Newton-meters (100 in-Lbf) applied torque, the peak stress was 262.00 Megapascals (38,000 pounds per square inch).
- the two degrees of freedom of flexure 544 accommodate shaft misalignment.
- drive unit assembly 541 can tolerate misalignment of drive shafts in motor pack 1541 with shafts in transmission unit 965, because each flexure 544 transfers torque to drive output disk 545 while flexing to compensate for a shaft 1466 ( Fig. 14 ) that is not perfectly co-axial with the corresponding drive shaft of drive unit 1500.
- Fig. 16C is a more detailed illustration of one aspect of a drive interface 557 of drive output disk 545, e.g., the distal part of drive output disk 545.
- Drive output disk 545 has a cylindrical body.
- Fig. 16D is a cross-sectional view of output disk 545 with drive dog 1652A.
- Two bores 1651A, 1651B extend through drive output disk 545.
- An input pin is fitted in each bore 1651A, 1651B and into a corresponding bore in cylinders 1643A, 1643B of flexure 544.
- Center post 1653 has a height that is larger than a height of tab 1654 and so helps to center drive output disk 545 with respect to a corresponding alignment receptacle in intermediate driven interface 655 of intermediate disk 653.
- Tab 1654 extends from center post 1653 towards a circumferential edge of distal end surface 1656.
- Centerlines 1670 and 1671 extend through and intersect at the center of center post 1653.
- Center post 1653 and tab 1654 assist in aligning drive output disk 545 to intermediate disk 653.
- Center post 1653 and tab 1654 also provide stability to the mated pair of disks.
- Pin 1655 in this aspect, is also centered on centerline 1670 and is positioned between center post 1653 and an edge of distal end surface 1656.
- Pin 1655 is a segment of a cylinder, e.g., the cylinder has been cut vertically by a plane to so that a portion of the outer surface of pin 1655 is flat and not cylindrical.
- pin 1655 has a generally three-dimensional D-shape.
- a generally three-dimensional D-shape means that the shape is similar enough to a three-dimensional D-shape to be recognized as a three-dimensional D shape, e.g., the shape of pin 1655.
- Pin 1655 is configured to mate with an alignment receptacle in intermediate disk 653.
- first and second alignment elements are illustrative only and is not intended to be limiting. Other shapes of the alignment elements and other orientations between the alignment elements may be used so long as backlash is not introduced under the second preload force, the elements do not bind when engaging and disengaging, and the elements provide stability to the mated pair of disks.
- Drive interface 557 includes two drive dogs 1652A, 1652B. Each of drive dogs 1652A, 1652B extend distally from distal end surface 1656. Each of drive dogs 1652A, 1652B is a same radial distance Rdog from a longitudinal axis of drive output disk 545. The longitudinal axis of drive output disk 545 runs through the center of center post 1653. Also, each drive dog 1652A, 1652B is close to the circumferential edge of proximal end surface 1656. The combination of radially equidistant drive dogs 1652A, 1652B and positioning drive dogs 1652A, 1652B adjacent the circumferential edge allows drive dogs 1652A, 1652B to efficiently transfer torque/motion to intermediate disk 653.
- the location of the drive dogs 1652A, 1652B relative to the circumferential edge of distal surface 1656 is determined by the location of drive dog receptacles on intermediate disk 653 (see Fig. 18A ).
- the diameter of intermediate disk 653 is determined, in part, by the number of intermediate disks 653 that can fit in movable body 651C of sterile adapter assembly 250.
- Drive dogs 1652A, 1652B are sized and positioned so that drive dogs 1652A, 1652B engage the drive dog receptacles in intermediate disk 653, as described more completely below, and so that drive dogs 1652A, 1652B do not contact the sidewall of movable body 651C.
- drive dogs 1652A, 1652B have mirror symmetry with respect to a plane that includes y-axis 1670 and a longitudinal axis (not shown) of drive output disk 545.
- the longitudinal axis of drive output disk 545 is perpendicular to both axis 1670 and axis 1671 at the center of center post 1653.
- Each of drive dogs 1652A, 1652B has mirror symmetry with respect to a plane that includes x-axis 1671 and the longitudinal axis of drive output disk 545. This plane bisects each of drive dogs 1652A, 1652B.
- the size of drive dogs 1652A, 1652B is selected based on strength requirements.
- a length of drive dogs 1652A, 1652B (radially from center to edge) in this application is determined by size constraints of the alignment features/antirotation features in the center of disk 545, and the height of drive dogs 1652A, 1652B is minimized to reduce the size and weight of the mechanism while assuring proper engagement with intermediate disk 653 under both the first and second preload forces.
- Drive dog 1652A is the same as drive dog 1652B and so only the characteristics of drive dog 1652A are considered in further detail.
- the description of drive dog 1652A is directly applicable to drive dog 1652B and so the description is not repeated for drive dog 1652B.
- Drive dog 1652A has a first portion 1652A1 and a second portion 1652A2.
- First portion 1652A1 extends distally from distal end surface 1656 to second portion 1652A2.
- Second portion 1652A2 extends from first portion 1652A1 in the distal direction.
- First portion 1652A1 of drive dog 1652A is a three-dimensional rectangle and so has four straight sides extending from distal end surface 1656, e.g., sides 1652s2, 1652s4 in Fig. 16D .
- straight means substantially parallel to plane including a longitudinal axis of drive dog 1652A and one of x-axis 1671 and y-axis 1670. The axis chosen depends on the side of the three-dimensional rectangle being considered. Substantially parallel means parallel to within manufacturing tolerances.
- Second portion 1652A2 ( Fig. 16D ) includes two opposing sides 1652cyl2, 1652cyl4 that are curved surface.
- the curved surface is a portion of a circular section, e.g., a portion of an outer surface of a cylinder 1658.
- Side surfaces 1652cyl2, 1652cyl4 are outer surfaces of a section of cylinder intersected by two parallel planes that include edges 1652e1, 165e2 and that extend out of Fig. 16D .
- side surfaces 1652cyl2, 1652cyl4 are curved surfaces.
- cylinder 1658 has a diameter of 3.175 millimeters (0.125 inches). The axis of cylinder 1658 extends out of Fig. 16D . In this aspect, the other two sidewalls of second section 1652A2 are straight sides.
- drive output disk 545 is an injection-molded disk.
- Drive output disk 545 can be made from polycarbonate, polyphenlysulfone (PPSU), polyethylenimine (PEI), etc.
- Fig. 17A is another illustration of sterile adapter assembly 250.
- a sterile drape (not shown) is fixedly attached to a rim 1751, e.g., is affixed by two-sided tape.
- Sterile drapes are known and so are not described in further detail. See for example, U.S. Patent No. US 7,666,191 B2 (filed Dec. 20, 2005 ), U.S. Patent No. 7,699,855 B2 (filed Mar. 31, 2006 ), U.S. Patent Application Publication No. US 2011/0277775 A1 (filed Aug. 12, 2010 ), and U.S. Patent Application Publication No. US 2011/0277776 A1 (filed Aug. 12, 2010 ).
- movable body 651C is mounted in sterile adapter frame 651 so that movable body 651C can move in the proximal and distal directions, i.e., can move in a first direction and in a second direction opposite to the first direction relative to the sterile adapter frame.
- Movable body 651C in the distal most position.
- Movable body 651C includes a receptacle for each intermediate disk 653 in plurality of intermediate disks 653P.
- Moveable body 651C also includes a plurality of hard stop receptacles 1757.
- Each intermediate disk 653 has a cylindrical body.
- each of sterile adapter frame 651, movable body 651C, and the plurality of intermediate disks 653P are made by injection molding.
- Suitable materials for sterile adapter frame 651, movable body 651C, and plurality of intermediate disks 653P include polycarbonate, polyphenlysulfone (PPSU), polyethylenimine (PEI), etc.
- Each intermediate disk 653 is mounted in a corresponding receptacle in movable body 651C. Each intermediate disk 653 can rotate within the receptacle and can move distally and proximally in the receptacle. In Fig. 17A , intermediate disk 653 is in the most distal position.
- Fig. 17B is an enlarged illustration of a portion of movable body 651C showing an intermediate disk receptacle 1766 and intermediate disk 653.
- Intermediate disk 653 has a tab 1767 extending from an outer side surface of disk 653 and extending from the proximal end surface of disk 653 (see Fig. 18A ). Intermediate disk 653 is said to be associated with an intermediate disk hard stop 1761. This means that tab 1767 can contact hard stop 1761 and upon contact, rotation of intermediate disk 653 is stopped.
- intermediate disk 653 When surgical instrument 260 is mounted on sterile adapter assembly 250, intermediate disk 653 is displaced proximally relative to movable body 651C. In this position, the most distal part of tab 1767, the bottom of tab 1767, is above the most proximal part of hard stop 1761, the top of stop 1761, so that intermediate disk 653 rotates freely and does not contact hard stop 1761.
- Figs. 18A and 18B are illustrations of intermediate driven interface 655 ( Fig. 18A ) and intermediate drive interface 756 ( Fig. 18B ) of intermediate disk 653.
- Intermediate driven interface 655 ( Fig. 18A ) is on a proximal end of intermediate disk 653.
- Intermediate driven interface 655 includes a first alignment receptacle and a second alignment receptacle.
- the first alignment receptacle is the combination of center post receptacle 1853 and tab receptacle 1854.
- the second alignment receptacle is pin receptacle 1855.
- center pin receptacle 1853 and tab receptacle 1854 is configured to mate with the combination of center post 1653 and tab 1654 when post 1653 and tab 1654 are aligned with receptacle 1853 and receptacle 1854, respectively.
- pin receptacle 1855 is configured to mate with pin 1655 when the two are aligned.
- Intermediate driven interface 655 also includes two drive dog receptacles 1852A, 1852B. As illustrated in Fig. 18A , drive dog receptacles 1852A, 1852B have mirror symmetry with respect to a plane that includes y-axis 1870 and a longitudinal axis (not shown) of intermediate disk 653. The longitudinal axis of intermediate disk 653 is perpendicular to both axis 1870 and axis 1871.
- Each of drive dog receptacles 1852A, 1852B has mirror symmetry with respect to a plane that includes x-axis 1671 and the longitudinal axis of intermediate disk 653. This plane bisects each of drive dog receptacles 1852A, 1852B.
- Each drive dog receptacle has an inner edge surface that is a same distance Rrcpt from a longitudinal axis of intermediate disk 653. The inner edge surface forms the third side of the drive dog receptacle, as explained more completely below. Since drive dog receptacle 1852A is the same as drive dog receptacle 1852B, only the characteristics of drive dog receptacle 1852A are considered in further detail. The description of drive dog receptacle 1852A is directly applicable to drive dog receptacle 1852B and so the description is not repeated for drive dog receptacle 1852B.
- Drive dog receptacle 1852A can be bounded by four sides.
- a first side is not present, and so the first side is said to be open.
- the use of an open sidewall is illustrative only and is not intended to be limiting.
- the first sidewall can be a solid sidewall.
- Second and fourth sides are walls that are perpendicular to the first side.
- the third side is a wall that is perpendicular to the second and fourth sides.
- drive dog receptacle 1852A is bounded by three walls that extend from an outer proximal edge surface 1856 of intermediate disk 653 distally into intermediate disk 653 to a bottom surface 1857 of drive dog receptacle 1852A.
- the third wall that is opposite to the open side is a straight wall extending from outer proximal edge surface 1856 to bottom surface 1857.
- the two opposing walls, second and fourth walls have two portions, as described below, a straight wall portion, and a sloped wall portion.
- Fig. 18C is a cross-sectional view of drive dog receptacle 1852A cut along a centerline perpendicular to x-axis 1871.
- Drive dog receptacle 1852A is divided into a first portion 1852A1 and a second portion 1852A2.
- First portion 1852A1 extends into intermediate disk 653 from outer proximal surface 1856 to second portion 1852A2.
- Second portion 1852A2 extends further into intermediate disk 653 from first portion 1852A1 to bottom surface 1857 of drive dog receptacle 1852A.
- Opposing walls that bound first portion 1852A1 of drive dog receptacle 1852A are straight walls 1852s2, 1852s4.
- a height of first portion 1852A1 is smaller than the height of portion 1652A1 of drive dog 1652A so that there is some space between the distal edge surface of drive output disk 545 and the proximal edge surface of intermediate disk 653.
- Second portion 1852A2 ( Fig. 18C ) is bounded by two opposing sidewalls 1852w2, 1852w4 that are a portion of an outer side surface of a wedge shape, i.e., sides 1852w2, 1852w4 are a sloped flat surface . Sidewalls 1852w2, 1852w4 subtend an angle ⁇ . Side surfaces 1852w1, 1852w2 are the surface portions of the wedge shape intersected by two parallel planes, e.g., a plane that includes line 1852e1 and a plane that includes bottom surface 1857. Both of these planes extend out of Fig. 18C .
- the portion of the wedge is selected so that when the distal end of drive dog 1652A is completely inserted in receptacle 1852, the distal end surface of drive dog 1652A does not contacts bottom surface 1857, and the cylindrical sidewall portions of cylinder 1658 contact sloped sidewalls 1852w2, 1852w4.
- angle ⁇ is 30 degrees, so sidewalls 1852w2, 1852w4 are portions of sides of a 30-degree wedge shape.
- drive output disk 545 is rotated. Since drive output disk 545 and intermediate disk 653 are in contact and partially coupled, rotation of drive output disk 545 rotates intermediate disk 653. Thus, either interfaces 557 and 655 align and mate, or tab 1767 on intermediate disk 653 contacts hard stop 1761. When tab 1767 contacts hard stop 1761, rotation of intermediate disk 653 is stopped. When interfaces 557 and 655 have not mated and rotation of intermediate disk 653 is stopped, drive output disk 545 continues to rotate until the two interfaces mate. Hence, the result is that disks 545 and 653 are coupled and rotation of drive output disk 545 is stopped at hard stop 1761.
- the control system uses the stopping of rotation of drive output disk 545 to determine the orientation of drive output disk 545. Note that if the two disks mated prior to reaching hard stop 1761, when hard stop 1761 is reached rotation of the two-mated disks is stopped.
- Fig. 18D is a cross sectional view that illustrates drive dog 1652A inserted in drive dog receptacle 1852A under a light preload force after drive interface 557 on drive output disk 545 has partially-coupled with intermediate driven interface 655 on intermediate disk 653.
- drive dog 1652A has a first portion 1652A1 with straight sides. The straight sides of first portion 1652A1 blend into a second portion 1652A2, a cylindrical tip, as described above.
- Drive dog receptacle 1852A also has a first portion 1852A1 with straight internal sidewalls. First portion 1852A1 blends into a second portion 1852A2 with tapered internal walls also as described above.
- Curved surfaces on two sides of the distal portion of drive dog 1652A and a sloped slide walls on the corresponding two sides on the distal portion of drive dog receptacle 1852A2, where the sloped sidewall is tangent to the curved side surface, are illustrative only and is not intended to be limiting.
- Other surfaces on the distal portion of drive dog 1652A and on the corresponding distal wall portions of drive dog receptacle 1862A could be used so long as under the high preload force, the second preload force, there is zero backlash in the rotational direction between drive output disk 545 and intermediate disk 653 for torque levels used in surgical procedures, and so long as the interface between the two disks compensates for angular misalignment.
- drive output disk 545 and intermediate disk 653 Due to the tapered walls of receptacle 1852A and the cylindrical surfaces on distal tip 1652A2 of drive dog 1652A, an appropriate force is required to hold drive output disk 545 and intermediate disk 653 in place so that the two disks function properly when torque/motion is applied by drive output disk 545 while the two disks are partially coupled. In the absence of this force, drive output disk 545 and intermediate disk 653 can separate because the applied torque can drive them apart.
- both drive dog 1652A and drive dog receptacle 1852A have the first portions with straight walls, as described above.
- the straight wall portions come into contact with one another as shown in Fig. 18C .
- drive dog 1652A and drive dog receptacle 1852A are no longer capable of driving themselves apart, and the motion can continue with a known or controlled level of backlash and without drive dog 1652A completely inserted into and coupled to drive dog receptacle 1852A.
- the known level of backlash is 1.13 degrees.
- the partial coupling between drive output disk 545 and intermediate disk 653 has a known level of backlash under the light preload force.
- a small amount of misalignment between the shaft driving disk 545 and the shaft that is driven by intermediate disk 653 can be tolerated.
- angular misalignment can be tolerated in the direction defined by the axis of blending cylinder 1658 which is into and out of the page in Fig. 18D .
- drive dog 1652A and drive dog receptacle 1852A are mated together under the high preload force, e.g., the second preload force, as described more completely below, there is no backlash in the interface between the two disks.
- the second preload force is sufficient to keep drive dog 1652A and drive dog receptacle 1852A from physically backing apart and separating when torque/motion is applied. Thus, this joint can transmit torque/motion without backlash.
- the coupling between drive output disk 545 and intermediate disk 653 has zero backlash for torque levels used in surgical procedures.
- Fig. 18B is a more detailed illustration of intermediate drive interface 756 on the distal end of intermediate disk 653.
- Intermediate drive interface 756 includes drive dogs 1862A, 1862B, and an engagement structure 1863.
- Each of drive dogs 1862A and 1862B is a structure that is equivalent to each of drive dogs 1652A and 1652B. Specifically, each of drive dogs 1862A, 1862B extend distally from distal end surface 1866. An inner edge of each of drive dogs 1862A, 1862B is a same radial distance from a longitudinal axis of distal end surface 1866. Also, each drive dog 1862A, 1862B is adjacent to the circumferential edge of distal end surface 1866. The combination of radially equidistant drive dogs 1862A, 1862B and of positioning of drive dogs 1862A, 1862B adjacent to the circumferential edge allows drive dogs 1862A, 1862B to efficiently transfer torque/motion to driven disk 964.
- drive dogs 1862A, 1862B have mirror symmetry with respect to a plane that includes x-axis 1871 and a longitudinal axis (not shown) of intermediate disk 653.
- the longitudinal axis of intermediate disk 653 is perpendicular to both axis 1870 and axis 1871 at the intersection of axis 1870 and axis 1871.
- Each of drive dogs 1862A, 1862B has mirror symmetry with respect to a plane that includes y-axis 1870 and the longitudinal axis (not shown). This plane bisects the drive dogs.
- Drive dog 1862A is the same as drive dog 1862B and so only the characteristics of drive dog 1862A is considered in further detail.
- the description of drive dog 1862A is directly applicable to drive dog 1862B and so the description is not repeated for drive dog 1862B.
- a lip1862L extends radially outward from the distal end of the second portion of drive dog 1862A.
- Two sidewalls 1862s2, 1862s4 are perpendicular to sidewall 1862s1 and lip 1862A1 extends radially outward from sidewall 1862s1.
- Lip 1862L is a retention feature that retains intermediate disk 653 in movable body 651C.
- Engagement structure 1863 in this aspect, is an open three-dimensional structure.
- Open three-dimensional structure has mirror symmetry with respect to a plane including the longitudinal axis of intermediate disk 653 and axis 1871, in this aspect.
- an open three-dimensional structure means a three-dimensional structure that does not have a closed perimeter, i.e., there is an opening at which an outer side surface meets an inner side surface.
- the open three-dimensional structure includes two parts-a generally three-dimensional letter C-shaped structure 1863C and two walls 1863A, 1863B.
- a generally three-dimensional letter C-shaped structure is a three-dimensional structure that is perceived as a three-dimensional letter C-shaped structure by a person viewing the structure.
- Three-dimensional letter C-shaped structure 1863C has a height, a first end 1863C1, and a second end 1863C2.
- the height of structure 1863C extends distally from distal end surface 1863 of intermediate disk 653, which could be called a distal face of intermediate disk 653, to the most distal end surface or most distal edge of structure 1863C.
- First end 1863C1 and second end 1863C2 bound an opening of C-shaped structure 1863C.
- Axis 1871 in this aspect, is equidistant from first end 1863C1 and from second end 1863C2 and is a centerline of C-shaped structure 1863C.
- the C-shaped structure 1863C is an example of an open three-dimensional structure that is a circular track.
- the circular track includes a first circumferential section having a first height, a first end, and a second end, e.g., the body of the C-shaped structure.
- the circular track also includes a second circumferential section extending between the first and second ends of the first circumferential section, e.g., the gap between the ends of the C-shaped structure.
- the second circumferential section has a second height. The second height is less than the first height.
- a centerline of the circular tracks extends through a center of the circular track and is equidistance from the first and second ends.
- Wall 1863A abuts first end 1863C1 and extends towards the circumferential edge of distal end surface 1866.
- Wall 1863B abuts second end 1863C2 and extends towards the circumferential edge of distal end surface 1866.
- Wall 1863A and wall 1863B have a same height.
- the height of wall 1863A and of wall 1863B extends distally from distal end surface 1863 of intermediate disk 653 to the most distal end surface or most distal edge of wall 1863A and of wall 1863B.
- the height of walls 1863A and 1863B is smaller than the height of C-shaped structure 1863C.
- the axis that bisects drive dog receptacles 1852A, 1852B i.e., x-axis 1871, is perpendicular to the axis that bisects drive dogs 1862A, 1862B.
- the axis of allowed rotation for intermediate disk 653 and driven disk 964 is 90 degrees to the axis of allowed rotation for intermediate disk 653 and drive output disk 545.
- each of drive dog receptacles 1852A, 1852B of intermediate disk 653 is positioned so that each of drive dog receptacles 1852A, 1852B is bisected by a first plane.
- Each of drive dogs 1862A, 1862B of intermediate disk 653 is positioned so that each of drive dogs 1862A, and 1862B is bisected by a second plane.
- the first plane is perpendicular to the second plane.
- the coupling of the interfaces between intermediate disk 653 and drive output disk 545 forms a first joint, while the coupling of the interfaces between intermediate disk 653 and driven disk 964 forms a second joint.
- These two working joints accommodate angular misalignment as the system rotates and transmits motion/torque.
- the two joints act like a set of U-Joints.
- Fig. 19A is an illustration of driven interface 980 on a proximal end of driven disk 964.
- Driven interface 980 includes an engagement receptacle 1963C, drive dog receptacles 1952A, 1952B, and a rotation disable element 1980.
- rotation disable element 1980 includes a rotation locking mechanism 1981.
- Drive dog receptacles 1952A, 1952B have mirror symmetry with respect to a plane that includes x-axis 1971 and a longitudinal axis (not shown) of driven disk 964.
- the longitudinal axis of driven disk 964 is perpendicular to the intersection of axis 1970 and axis 1971.
- Each of drive dog receptacles 1952A, 1952B has mirror symmetry with respect to a plane that includes y-axis 1970 and the longitudinal axis of driven disk 964. This plane bisects the drive dog receptacles.
- Each drive dog receptacle has an inner edge surface that is a same distance Rrcpt2 from the longitudinal axis of driven disk 964.
- drive dog receptacle 1952A is the same as drive dog receptacle 1952B, only the characteristics of drive dog receptacle 1952B are considered in further detail.
- the description of drive dog receptacle 1952B is directly applicable to drive dog receptacle 1952A and so the description is not repeated for drive dog receptacle 1952A.
- Drive dog receptacle 1952B can be bounded by four sides.
- Second and fourth sides are walls that are perpendicular to a first side.
- the third side is a wall that is perpendicular to the second and fourth sides.
- a first of four sides is missing and so is referred to as an open first side.
- the use of an open sidewall is illustrative only and is not intended to be limiting.
- the first sidewall can be a solid sidewall.
- drive dog receptacle 1952B is bounded by three walls that each extends from an outer proximal edge surface 1956 of driven disk 964 to a bottom surface 1957 of drive dog receptacle 1952B.
- the third wall that is opposite to the open side is a straight wall 1952s3 extending from outer proximal edge surface 1956 to bottom surface 1957.
- the two opposing walls, second and fourth walls have two portions, straight wall portions1852s2, 1952s4, and a sloped wall portion 1952w2, 1952w4.
- drive dog receptacle 1952B is divided into a first portion 1952B1 and a second portion 1952B2.
- First portion 1952B1 extends into driven disk 964 from an outer proximal edge surface 1956 to second portion 1952B2.
- Second portion 1952B2 extends further into driven disk 964 from first portion 1952B1 to bottom surface 1957 of drive dog receptacle 1952B.
- the other characteristics of drive dog receptacle 1952B are the same as the characteristics described above for drive dog receptacle 1852A and so that description is applicable to drive dog receptacle 1953B and is not repeated here.
- Engagement receptacle 1963 in this aspect, includes an open three-dimensional groove formed in the proximal end of driven disk 964.
- the open three-dimensional groove extends distally into driven disk 964 from outer proximal edge surface1956.
- an open three-dimensional groove means a three-dimensional groove that does not have closed inner and outer perimeters.
- the open three-dimensional groove is a generally three-dimensional letter C-shaped groove 1963C that has a width and a depth.
- Three-dimensional letter C-shaped groove 1963C has a first end 1963C1 and a second end 1963C2.
- First end 1963C1 and second end 1963C2 are separated from rotation disable element 1980 by a first gap 1963A and a second gap 1963B, respectively.
- rotation disable element 1980 includes a flexure1980F with rotation locking mechanism 1981 at one end.
- flexure 1980F extends radially outward from a center region of the proximal end of driven disk 964 towards the sidewall of driven disk 964. The center region is bounded by C-shaped groove 1963.
- Rotation locking mechanism 1981 extends in a distal direction from an end of flexure 1980F. Rotation locking mechanism 1981 forms part of a sidewall of disk 964. The most distal end of rotation locking mechanism 1981 is a tang, in this aspect.
- Fig. 19B is an illustration of a part of body 1985 of driven interface assembly 961.
- Body 1985 includes a driven disk receptacle 1986.
- a plurality of gear teeth 1987 extend in the proximal direction from a bottom surface of driven disk receptacle 1986.
- Body 1985 includes a driven disk receptacle 1986 for each driven disk 964 in plurality of driven disks 964P.
- Shaft 1466 of transmission unit 965 has a proximal end that extends into driven disk receptacle 1986.
- Driven disk 964 is mounted on the proximal end of shaft 1466 so that driven disk 964 is positioned in driven disk receptacle 1986 and can rotate within driven disk receptacle 1986.
- driven disk 964 in driven interface assembly 961 pushes intermediate disk 653 in sterile adapter assembly 250 proximally relative to movable body 651C so that the intermediate disk 653 can rotate freely, e.g., tab 1767 on intermediate disk 653 is moved proximally so that tab 1767 no long contacts hard stop 1761 as intermediate disk 653 rotates.
- drive interface 756 of intermediate disk 653 in sterile adapter assembly 250 is not aligned with driven interface 980 of driven disk 964.
- Fig. 20A illustrates a cut-away view of when intermediate disk 653 and driven disk 964 are in partial contact, i.e., are partially coupled.
- C-shaped structure 1863C is partially inserted in C-shaped groove 1963C.
- wall 1863A is not aligned with gap 1963A and wall 1863B is not aligned with gap 1963B.
- C-shaped structure 1863 only goes into C-shaped groove 1963C until walls 1863A, 1863B contact proximal outer edge surface 1956 of driven disk 964.
- a part of C-shaped structure 1863 rests on flexure 1980F and deflects flexure 1980F in the distal direction.
- the deflection of flexure 1980F moves rotation-locking mechanism 1981 distally so that tang 1981T engages teeth 1987 on the bottom surface of driven disk receptacle 1986.
- the engagement of tang 1981T with teeth 1987 prevents driven disk 964 from rotating.
- driven disk 964 As driven disk 964 is held stationary and intermediate disk 653 is rotated, walls 1863A and 1863B become aligned with gap 1963A and gap 1963B, respectively, and the preload force causes C-shaped structure 1863C to insert completely into C-shaped groove 1963C and walls 1863A and 1863B to insert into gap 1963A and gap 1963B, respectively.
- each of the drive dogs is inserted into the corresponding drive dog receptacle. Since C-shaped structure 1863C is no longer pushing on flexure 1980T, flexure 1980T returns to the undeflected state ( Fig. 20B ). This disengages tang 1981T from teeth 1987 and so driven disk 964 can rotate.
- driven disk 964 has coupled with intermediate disk 653 so that torque is transferred to shaft 1466.
- Flexure 1980F is illustrative only and is not intended to be limiting.
- a spring-loaded pin could be included in the driven disk 964 so that C-shaped structure 1863 depressed the pin until intermediate disk 653 and driven disk 964 were coupled.
- the depressed pin could push on a flexure in the distal end of driven disk 964 that includes a tang on one end. The tang would engage teeth 1987 until the force on the flexure was removed.
- the spring-loaded pin could engage teeth 1987 to prevent rotation.
- the coupling between intermediate disk 653 and driven disk 964 and the coupling between drive output disk 545 and intermediate disk 653 have a known non-zero backlash for torque levels necessary to bring the two disks into alignment.
- the partial coupling between drive output disk 545 and intermediate disk 653 has zero backlash.
- the preload force is changed from the first preload force to the second preload force using preload assembly 780.
- Insertion assembly 331 includes a frame 2110, a mid-carriage 2120, and a distal carriage 2130.
- Mid-carriage 2120 rides on a ball screw 2111 in frame 2110.
- ball screw 2111 has a 6 mm pitch and so is back drivable.
- Mid-carriage 2120 includes metal belts 2121 that drive distal carriage 2130.
- Distal carriage 2130 is attached to instrument manipulator assembly housing 741 of instrument manipulator assembly 240. Distal carriage 2130 moves twice as far as mid-carriage 2120 in one aspect.
- Figs. 22A and 22B illustrate preload assembly 780 in greater detail.
- surgical instrument 260 is mounted in sterile adapter assembly 250.
- surgical instrument 260 is not shown in Figs. 22A and 22B .
- the distal end of surgical instrument is, for example positioned at an entry to a channel in entry guide 270.
- cam follower assembly 2283 in preload assembly 780 is positioned in a valley in a preload track 2225 on mid-carriage 2120, e.g., is positioned at a first location on preload track 2225.
- Preload track 2225 is mounted on mid-carriage 2120.
- the valley is located at a proximal end of preload track 2225.
- Cam follower assembly 2283 is rotatably connected to a first end of an arm 2282 in preload assembly 780.
- a second end of arm 2282 is connected to a motor pack bracket 2281.
- Motor pack bracket 2281 is affixed to motor pack 1541.
- arm 2282 is coupled to motor pack 1541.
- instrument manipulator assembly housing 741 is transparent so that the features and elements within instrument manipulator assembly housing 741 are visible. As indicated above, instrument manipulator assembly housing 741 is affixed to distal carriage 2130
- Pivot pin 2284 on which cam follower assembly 2283 is rotatably mounted, is coupled to instrument manipulator assembly housing 741 of instrument manipulator assembly 240.
- pivot pin 2284 moves cam follower assembly 2283 the same distance Zload.
- distance Zload is 9.779 cm (3.85 inches).
- a wheel 2283W is rotatably attached to a first end of cam follower assembly 2283, and wheel 2283W rides on preload track 2225.
- wheel 2283W follows the contour of preload track 2225.
- the distance between preload track 2225 and pivot point 2284 diminishes as cam follower assembly 2283 moves distally. Consequently, as cam follower assembly 2283 rides up ramp 2225R in preload track 2225, cam follower assembly 2283 rotates from a first position illustrated in Fig. 22A to a second position as illustrated in Fig. 22B and moves motor pack 1541 a distance that is greater than the distance traveled by instrument manipulator assembly housing 741.
- the rotation of cam follower assembly 2283 displaces motor pack 1541 a predetermined distance distally relative to instrument manipulator assembly housing 741.
- Fig. 22C illustrates a portion of cam follower assembly 2283 and a portion of preload track 2225.
- preload track 2225 exerts a wheel force F_wheel on preload track 2225.
- Wheel force F _ wheel is perpendicular to preload track 2225.
- Force F _ wheel is made up of two perpendicular forces-a retraction force F_retract and a longitudinal force F_long.
- Retraction force F_retract is a force that the user would apply in the distal direction to move surgical device assembly 300 distally. Alternatively, part or all of this force could be applied by the motor so that the user does not need to exert the full force.
- cam follower assembly 2282 two acts are performed by cam follower assembly 2282 as cam follower assembly 2283 travels along track 2225.
- cam follower assembly 2283 moves up ramp 2225R and rotates, the rotation of cam follower assembly 2283 pushes motor pack distally a distance greater than distance Zload, e.g., motor pack 1541 moves a distance (Zload + ⁇ ).
- cam follower assembly 2283 transfers a force proportional of longitudinal force F_long to motor pack 1541, which in turn compresses the first and second springs 1601, 1602 so that second preload force is asserted on drive output disk 545.
- the second preload force is a combination of the forces provided by compressed spring 1601, 1602.
- a force provided by compressed spring 1602 is larger than a force provided by compressed spring 1601.
- the second preload force asserted on drive output disk 545 is applied to each of the other disks in disk stack 1400.
- the second preload force is 13.3 Newtons (3.0 Lbf).
- Figs. 22D and 22E shows that motor pack 1541 has moved an additional distance ⁇ relative to the top of instrument manipulator assembly housing 741 that moved distance Zload.
- distance ⁇ is 0.538 cm (0.212 inches).
- Figs. 22D and 22E show that distance the proximal end of arm 2282 moves as cam follower assembly 2283 rotates is distance ⁇ . This is illustrative only and is not intended to be limiting.
- cam follower assembly 2283 could have different length moment arms 2283M1 and 2283M2 (see Fig. 23 ) so that when wheel 2283W traverses ramp 2225R having a height ⁇ , arm 2282 and consequently motor pack 1541 is moved a distance larger than distance ⁇ , or alternatively could have different length moment arms 2283M1 and 2283M2 (see Fig. 23 ) so that when wheel 2283W traverses ramp 2225R having a height ⁇ , arm 2282 and consequently motor pack 1541 is moved a distance smaller than distance ⁇ .
- Figs. 22D illustrates that a ramp 2225R has a height ⁇ , e.g., wheel 2283W is displaced a distance ⁇ in a direction perpendicular to track 2225 as wheel 2283 moves from the first position to the second position.
- Fig. 22F is an illustration of one aspect of preload track 2225.
- One example of dimensions for preload track 2225 is given in Table 2.
- Table 2 REFERENCE NUMBER DIMENSION Home 0 cm (0 inches) P1 0.13 cm (0.05 inches) P2 0.84 cm (0.33 inches) P3 2.90 cm (1.14 inches) P4 4.88 cm (1.92 inches) R2 4.57 cm (1.80 inches) (radius) R3 12.7 cm (5.00 inches) (radius) A3 171 degrees ⁇ 0.54 cm (0.212 inches)
- Preload track 2225 is configured to smoothly ramp the preload force from the first preload force to the second preload force.
- Fig. 22G is a graph of the retraction force as preload assembly 780 moves distally from the first location to the second location on preload track 2225. Curve 2280 gives the retraction force at each insertion distance. The retraction force acts on the instrument manipulator assembly housing 741 in the proximal direction.
- the first position is an insertion distance of 0.0 cm (0.0 inches) and the second position is an insertion distance of 9.78 cm (3.85 inches).
- the retraction force increases about linearly from 0.0 to about 1.52 cm (0.0 to about 0.6 inches), then continues to increase linearly at a reduced slope from about 1.52 to 5.59 cm (0.6 to 2.2 inches). From about 5.59 to 6.60 cm (2.2 to 2.6 inches), the force increases and peaks, then tapers to zero force at about 9.78 cm (3.85 inches).
- the second preload force of 10.2 Newtons (2.3 Lbf). is reached.
- the second preload spring is compressed to its maximum value in this design, and so provides no additional resistance to distal motion.
- the instrument tip protrudes from the cannula at an insertion depth of 12.19 cm (4.8 inches) or larger.
- disk stack 1400 is fully preloaded and the backlash effectively reduced to zero before the instrument tip exits the cannula.
- curve 2280 a track is machined that provides this retraction force versus insertion profile.
- the machining creates a preload track profile that smoothly ramps the preload force according to curve 2280.
- Curve 2280 is illustrative only and is not intended to be limiting. In view of this disclosure, one knowledgeable in the field can create a retraction force versus insertion distance for a particular preload spring assembly and a particular cannula and surgical instrument.
- Fig. 23 is a more detailed illustration of preload assembly 780.
- Arm 2282 has a first end 2882A rotatably connected to a first end 2283A of an L-shaped body 2283B of cam follower assembly 2283.
- a second end 2282B of arm 2282 is connected to motor pack bracket 2281.
- Motor pack bracket 2281 is affixed to motor pack 1541.
- first moment arm 2283M1 is perpendicular to second moment arm 2283M2 at pivot pin 2284 and have a same length.
- longitudinal force F_long is applied to motor pack 1541
- the two moment arms may not be perpendicular. If the moment arms are not perpendicular, or if the moment arms have different lengths, the force applied to motor pack 1541 is proportional to longitudinal force F_long.
- the shape of body 2283 is selected to accommodate the two moment arms and to provide the necessary strength to rotate and transfer the longitudinal force to the motor pack.
- Second end 2283B of L-shaped body 2283B is rotatably connected to wheel 2283W.
- Wheel 2283W rides on preload track 2225.
- a vertex of L-shaped body 2283B is rotatably connected to pivot pin 2284.
- Pivot pin 2284 is fixedly attached to instrument manipulator assembly housing 741 of instrument manipulator assembly 240.
- First moment arm 2283M1 of preload assembly 740 extends from the center of rotation of wheel 2283W to a center of rotation of vertex of L-shaped body 2283B.
- Second moment arm 2283M2 of preload assembly 740 extends from the center of rotation of first end 2282A of arm 2282 to a center of rotation of vertex of L-shaped body 2283B.
- cam follower assembly 2283 rotates as indicated in Fig. 22B and so motor pack 1541 is displaced relative to instrument manipulator assembly housing 741 and consequently longitudinal force F_long is applied on spring assemblies in motor pack 1541.
- preload assembly 780 also includes a preload release mechanism.
- the preload release mechanism includes a preload release button 2382, a preload release lever 2385, a preload engagement arm 2386, and a return spring (not shown, but see Figs. 4A to 4H).
- Preload release button 2382 is an example of preload release button 482.
- a torsional spring, concentric with pin 2388 which exerts a clockwise torque on preload release lever 2385 (clockwise relative to Fig. 23 ). This is necessary to keep preload release lever 2385 and preload release button 2382 in the unreleased position (shown), unless release button 2382 is pressed.
- preload engagement arm 2386 A first end, a proximal end, of preload engagement arm 2386 is rotatably coupled to pivot pin 2284.
- a rolling pin 2386P is mounted in a second end, a distal end of preload engagement arm 2386. Proximal to rolling pin 2386P in the second end of engagement arm 2386 is a preload engagement surface 2386S.
- preload engagement surface 2386S is perpendicular to the flat portion of preload track 2225.
- Preload engagement arm 2386 is coupled to a linear rail.
- preload release lever 2385 A hook on a first end, a proximal end, of preload release lever 2385 is engaged with rolling pin 2386P in the second end of engagement arm 2385.
- Preload release button 2382 is coupled to, e.g., is in contact with, a second end, a distal end, of preload release lever 2385. Between the first and second ends of preload release lever 2385, preload release lever is rotatably mounted on another pivot pin 2388, which functions as a fulcrum for preload release lever 2385.
- preload release lever 2385 is a Class 1 lever because the fulcrum is between the effort (the forces supplied by preload release button 2382) and the load (the coupling between the hook and rolling pin 2386P). While in this example, preload release lever 2385 is implemented as a Class 1 lever, this is illustrative only and is not intended to be limiting. In other aspects, a Class 2 lever or a Class 3 lever could be used. For a Class 2 lever, the load is between the fulcrum and the effort, and for a Class 3 lever, the effort is between the fulcrum and the load.
- preload release button 2382 ( Fig. 24A ).
- preload release button 2382 applies a force to the second end of preload release lever 2385.
- the force on the second end preload release lever 2385 causes preload release lever 2385 to rotate about pivot pin 2388 and disengage the hook on the second end of preload release lever 2385 from rolling pin 2386P that is mounted in the second end of preload engagement arm 2386.
- Fig. 24B is an illustration of one implementation of the automatic preload reset mechanism in preload assembly 780.
- instrument manipulator assembly 240 sends a signal to controller 290 indicating the presence of sterile adapter assembly 250.
- controller 290 activates a motor that moves instrument manipulator assembly 240 proximally.
- Instrument manipulator assembly housing 741 moves proximally twice as fast as preload engagement ridge 2326 on preload track 2225. This is because distal carriage 2130 moves twice as far as mid carriage 2120. In this aspect, preload engagement ridge 2326 extends from a distal portion of preload track 2225.
- preload engagement ridge 2326 moves proximally at half the speed of preload engagement arm 2386 and instrument manipulator assembly housing 741.
- surface 2386S of preload engagement arm 2386 engages preload engagement ridge 2326 on preload track 2225 as instrument manipulator assembly housing 741 moves proximally.
- preload engagement ridge 2326 exerts a longitudinal force in the distal direction on surface 2386S of preload engagement arm 2386. This causes cam follower assembly 2283 to apply a longitudinal force on motor pack 1541 as described above.
- FIGs. 23 , 24A, and 24B only the elements necessary to understand the release mechanism are illustrated.
- the actual configuration associated with Figs. 23 , 24A, and 24B includes all the elements shown and described with respect to Fig. 22A .
- Fig. 25 is a cut-away view of a portion of surgical device assembly 300 that illustrates a surgical instrument removal lockout apparatus.
- the surgical instrument removal lockout apparatus includes the preload mechanism that applies a preload force on disk stack 1400, a plurality of hard stops 2437, and a plurality of hard stop receptacles 1757.
- Plurality of hard stops 2437 are an example of plurality of hard stops 437.
- Each of plurality of hard stops 2437 extend in a distal direction from a distal face of motor pack 1541. As illustrated in Fig. 17A , each of plurality of hard stop receptacles extends from a proximal face of moveable body 651C of sterile adapter assembly 250 in a distal direction into moveable body 651C.
- moveable body 251 is at the most distal position within sterile adapter frame 651 of sterile adapter assembly 250. In this position, plurality of hard stops 2437 is not in plurality of receptacles 2437, and movable body 651C is free to move within sterile adapter frame 651.
- surgical instrument 260 can be mounted in sterile adapter assembly 250 as described above.
- plurality of hard stops 2437 extend into plurality of receptacles 2437, and plurality of hard stops 2437 prevents moveable body 651C from moving in the proximal direction. Removal of surgical instrument 260 moves movable body 651C in the proximal direction.
- plurality of hard stops 2437 prevents moveable body 651C from moving in the proximal direction, and consequently removal of surgical instrument 260 is inhibited.
- plurality of hard stop receptacles 2437 is illustrative only and is not intended to be limiting. In another aspect, plurality of hard stop receptacles 1757 is not used. Instead, plurality of hard stops 2437 contact a proximal surface of moveable body 651C and prevent movement of moveable body 651C in the proximal direction.
- a surgical instrument manipulator assembly 240 includes an instrument manipulator assembly housing 741, sometimes referred to as housing 741, and a motor pack 1541.
- Motor pack 1541 is movably coupled to housing 741.
- a plurality of hard stops 2437 are mounted in a distal end of motor pack 1541.
- Plurality of hard stops 2437 can be positioned in at least a first position and a second position relative to housing 741 of the surgical instrument manipulator assembly 240.
- a surgical instrument 260 can be coupled to and decoupled from instrument manipulator assembly 240.
- plurality of hard stops 2437 is in the second position, surgical instrument 260 cannot be decoupled from instrument manipulator assembly 240.
- Fig. 26A is a more detailed cut-away illustration of sterile adapter release latch 2635.
- Sterile adapter release latch 2635 is an example of one aspect of release latch 435.
- Lip 654 on one end of sterile adapter frame 651 is engaged by a lip 2635L extending from a distal end of sterile adapter release latch 2635.
- Sterile adapter release latch 2635 is mounted in a wall of instrument manipulator assembly housing 741 so that sterile adapter release latch 2635 can pivot to engage with and disengage from sterile adapter frame 651 of sterile adapter 250.
- the pivotal connection of sterile adapter release latch 2635 to the frame is spring loaded is so that the steady position of latch 2635 is in the engaged position.
- a latch pin 2635P is coupled to a proximal portion of sterile adapter release latch 2635.
- latch pin 2635P does not prevent sterile adapter release latch 2635 from pivoting to engage with and disengage from sterile adapter frame 651.
- the automatic preload reset mechanism exerts a preload force, e.g., a light preload force, on motor pack 1541 when motor pack 1541 is moved to location Preload_1 by the preload engagement mechanism.
- a preload force e.g., a light preload force
- release latch inhibit stop 2638 that is mounted to motor pack 1541 also is moved distally.
- Fig. 26A illustrates a potential problem if the automatic preload reset mechanism is energized, while sterile adapter release latch 2635 is depressed.
- release latch inhibit stop 2638 moves distally, release latch inhibit stop 2638 would hit latch pin 2635P if sterile adapter release latch 2635 were not released. This potentially could damage latch pin 2635P, e.g., bend latch pin 2635P, so that the sterile adapter removal inhibit mechanism would not work properly.
- latch pin 2636P ( Fig. 26B ) is pivotally connected to a proximal portion of sterile adapter release latch 2635, and the connection is spring-loaded by spring 2634.
- latch pin 2635P pivots and so is not damaged.
- spring 2634 causes latch pin 2633P to return to its original position.
- proximal or proximally
- distal or distal are used in a general way to describe an object or element which is farther away from the manipulator arm base along the kinematic chain of system movement or closer to the remote center of motion (or a surgical site) along the kinematic chain of system movement.
- first,” “second,” “third,” “fourth,” etc. are adjectives used to distinguish between different components or elements. Thus, “first,” “second,” “third,” “fourth,” etc. are not intended to imply any ordering of the components or elements.
- spatially relative terms such as “beneath”, “below”, “lower”, “above”, “upper”, “proximal”, “distal”, and the like-may be used to describe one element's or feature's relationship to another element or feature as illustrated in the figures.
- These spatially relative terms are intended to encompass different positions (i.e., locations) and orientations (i.e., rotational placements) of the device in use or operation in addition to the position and orientation shown in the figures. For example, if the device in the figures is turned over, elements described as “below” or “beneath” other elements or features would then be “above” or “over” the other elements or features.
- the exemplary term “below” can encompass both positions and orientations of above and below.
- the device may be otherwise oriented (rotated 90 degrees or at other orientations) and the spatially relative descriptors used herein interpreted accordingly.
- descriptions of movement along and around various axes include various special device positions and orientations.
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Robotics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Manipulator (AREA)
- Human Computer Interaction (AREA)
Claims (14)
- Appareil comportant :
un élément d'interface de dispositif chirurgical (450) comportant une première structure formant corps (451C) et une pluralité de disques intermédiaires (453) montés de manière rotative dans la première structure formant corps ;chaque disque intermédiaire de la pluralité de disques intermédiaires étant configuré pour assurer l'interface avec un disque de sortie d'entraînement (445) d'un ensemble formant manipulateur d'instrument et un disque entraîné (464) d'un instrument, et chaque disque intermédiaire de la pluralité de disques intermédiaires comportant une interface entraînée proximale (455), une interface d'entraînement distale (456), et une surface distale ;l'interface entraînée (455) comportant un premier réceptacle d'alignement et des réceptacles de crabot d'entraînement (1852A, 1852B) ;l'interface d'entraînement (456) étant opposée par rapport à l'interface entraînée (455) et séparée de celle-ci, caractérisé par l'interface d'entraînement (456) comportant des crabots d'entraînement (1862A, 1862B) et une structure de mise en prise (1863), et la structure de mise en prise (1863) comportant une structure tridimensionnelle ouverte s'étendant dans une direction distale depuis la surface distale du disque intermédiaire. - Appareil selon la revendication 1, dans lequel le premier réceptacle d'alignement est configuré pour s'accoupler avec un premier élément d'alignement (1653, 1654) s'étendant depuis un disque de sortie d'entraînement (445) de l'ensemble formant manipulateur d'instrument.
- Appareil selon la revendication 1 :dans lequel l'interface entraînée (455) comporte par ailleurs un deuxième réceptacle d'alignement (1855) ;dans lequel le premier réceptacle d'alignement est configuré pour s'accoupler avec un premier élément d'alignement (1653, 1654) s'étendant depuis le disque de sortie d'entraînement (445) de l'ensemble formant manipulateur d'instrument (440) ;dans lequel le deuxième réceptacle d'alignement (1855) est configuré pour s'accoupler avec un deuxième élément d'alignement (1655) s'étendant depuis le disque de sortie d'entraînement (445) ;dans lequel le premier réceptacle d'alignement est séparé du deuxième réceptacle d'alignement (1855) ; etdans lequel une combinaison du premier réceptacle d'alignement et du deuxième réceptacle d'alignement oriente le disque de sortie d'entraînement (445) par rapport au disque intermédiaire (453) si le disque de sortie d'entraînement (445) et le disque intermédiaire (453) sont accouplés.
- Appareil selon la revendication 1, la première structure formant corps (451C) comportant par ailleurs :
une pluralité de butées dures (437), dans lequel chaque disque intermédiaire (453) est associé à l'une de la pluralité de butées dures. - Appareil selon la revendication 4, chaque disque intermédiaire (453) de la pluralité de disques intermédiaires comportant par ailleurs :une surface latérale extérieure ; etune languette de butée dure (1767) s'étendant depuis la surface latérale extérieure ;dans lequel, dans une première position axiale du disque intermédiaire (453), la languette de butée dure (1767) entre en contact avec la butée dure (1761) associée au disque intermédiaire ; etdans lequel, dans une deuxième position axiale du disque intermédiaire (453), le disque intermédiaire (453) tourne librement sans que la languette de butée dure (1767) n'entre en contact avec la butée dure (1761) associée au disque intermédiaire (453).
- Appareil selon la revendication 1, chaque disque intermédiaire (453) de la pluralité de disques intermédiaires comportant par ailleurs :une surface latérale extérieure ; etune languette de butée dure (1767) s'étendant depuis la surface latérale extérieure.
- Appareil selon la revendication 1 :dans lequel chacun des réceptacles de crabot d'entraînement (1852A, 1852B) comporte :une première partie (1852A1) comportant des parois latérales opposées s'étendant depuis une surface extérieure du disque intermédiaire (453) jusque dans le disque intermédiaire (453) ;une surface inférieure (1857) du réceptacle de crabot d'entraînement (1852A) ; etune deuxième partie (1852A2) s'étendant depuis la première partie (1852A1) jusqu'à la surface inférieure (1857), la deuxième partie (1852A2) comportant deux surfaces latérales opposées de la deuxième partie, dans lequel chaque surface latérale de la deuxième partie comporte une surface inclinée, et de préférencedans lequel la surface inclinée comporte une partie d'une surface latérale d'une cale.
- Appareil selon la revendication 1, dans lequel chacun des crabots d'entraînement (1862A, 1862B) comporte :une première partie comportant une structure tridimensionnelle ; etune deuxième partie s'étendant depuis la première partie, la deuxième partie comportant deux surfaces latérales opposées de la deuxième partie, dans lequel chaque surface latérale de la deuxième partie comporte une surface courbe, et de préférencedans lequel la surface courbe comporte une partie d'une section circulaire.
- Appareil selon la revendication 1 :dans lequel chacun des réceptacles de crabot d'entraînement (1852A, 1852B) est positionné de telle sorte que chacun des réceptacles de crabot d'entraînement (1852A, 1852B) est divisé en deux par un premier plan ;dans lequel chacun des crabots d'entraînement (1862A, 1862B) est positionné de telle sorte que chacun des crabots d'entraînement (1862A, 1862B) est divisé en deux par un deuxième plan ; etdans lequel le premier plan est perpendiculaire par rapport au deuxième plan.
- Appareil selon la revendication 1, chacun des réceptacles de crabot d'entraînement (1852A, 1852B) comprenant une première surface de bord positionnée à une première distance par rapport à un axe longitudinal du disque intermédiaire, et une deuxième surface de bord opposée par rapport à la première surface de bord.
- Appareil selon la revendication 1, l'élément d'interface de dispositif chirurgical (450) comportant par ailleurs :une deuxième structure formant corps (451) ;dans lequel la première structure formant corps (451C) est montée de manière mobile dans la deuxième structure formant corps (451), et de préférencedans lequel la deuxième structure formant corps (451) comporte une plaque de protection(755B).
- Appareil selon la revendication 1, dans lequel la structure tridimensionnelle ouverte comporte :
une piste circulaire comportant :une première section circonférentielle (1863C) ayant une première hauteur, une première extrémité (1863C1), et une deuxième extrémité (1863C2) ;une deuxième section circonférentielle s'étendant entre la première extrémité et la deuxième extrémité de la première section circonférentielle, la deuxième section circonférentielle ayant une deuxième hauteur inférieure par rapport à la première hauteur ; etune ligne centrale s'étendant au travers d'un centre de la piste circulaire et équidistante depuis la première extrémité et la deuxième extrémité de la première section circonférentielle. - Appareil selon la revendication 12, dans lequel la structure tridimensionnelle ouverte comporte par ailleurs :
une paroi (1863A) s'étendant dans une direction sensiblement parallèle par rapport à la ligne centrale de la piste circulaire depuis l'une parmi la première extrémité et la deuxième extrémité de la première section circonférentielle, la paroi s'étendant vers un bord extérieur de la surface distale du disque intermédiaire (453) de la pluralité de disques intermédiaires, et la paroi comportant une hauteur inférieure par rapport à la première hauteur de la première section circonférentielle. - Appareil selon la revendication 1, comportant par ailleurs :l'ensemble formant manipulateur d'instrument (440) ; et l'instrument (460) ; dans lequel l'ensemble formant manipulateur d'instrument est un ensemble formant manipulateur d'instrument chirurgical ;dans lequel l'instrument est un instrument chirurgical ;dans lequel l'élément d'interface de dispositif chirurgical (450) est monté sur l'ensemble formant manipulateur d'instrument (440), et de préférencedans lequel le disque de sortie d'entraînement (445) de l'ensemble formant manipulateur d'instrument (440) comporte par ailleurs une interface d'entraînement (456) accouplée à l'interface entraînée (455) du disque intermédiaire (453) ;dans lequel, lors de l'application d'une force de précharge prédéterminée au niveau du disque de sortie d'entraînement (445), l'accouplement entre le disque intermédiaire (453) et le disque de sortie d'entraînement (445) ne comporte aucun jeu, et de préférencedans lequel le disque entraîné (464) de l'instrument chirurgical comporte une interface entraînée accouplée à l'interface d'entraînement (456) du disque intermédiaire (453) ; etdans lequel, lors de l'application d'une force de précharge prédéterminée sur le disque intermédiaire, l'accouplement entre le disque intermédiaire (453) et le disque entraîné (464) ne comporte aucun jeu.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361866120P | 2013-08-15 | 2013-08-15 | |
| PCT/US2014/051033 WO2015023834A1 (fr) | 2013-08-15 | 2014-08-14 | Éléments d'entraînement d'adaptateur stérile d'instrument |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP3033035A1 EP3033035A1 (fr) | 2016-06-22 |
| EP3033035A4 EP3033035A4 (fr) | 2017-07-12 |
| EP3033035B1 true EP3033035B1 (fr) | 2020-11-25 |
Family
ID=52468689
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14836832.7A Active EP3033035B1 (fr) | 2013-08-15 | 2014-08-14 | Éléments d'entraînement d'adaptateur stérile d'instrument |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US10271911B2 (fr) |
| EP (1) | EP3033035B1 (fr) |
| JP (3) | JP6513670B2 (fr) |
| KR (1) | KR102312595B1 (fr) |
| CN (2) | CN109602495B (fr) |
| WO (1) | WO2015023834A1 (fr) |
Families Citing this family (72)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9339342B2 (en) | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| JP6426181B2 (ja) | 2013-08-15 | 2018-11-21 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 可変器具予荷重機構コントローラ |
| WO2015023730A1 (fr) | 2013-08-15 | 2015-02-19 | Intuitive Surgical Operations, Inc. | Interface d'instrument chirurgical préchargé |
| WO2015023834A1 (fr) | 2013-08-15 | 2015-02-19 | Intuitive Surgical Operations, Inc. | Éléments d'entraînement d'adaptateur stérile d'instrument |
| CN108784838B (zh) | 2013-08-15 | 2021-06-08 | 直观外科手术操作公司 | 器械无菌适配器驱动接口 |
| EP3033031B1 (fr) | 2013-08-15 | 2019-03-20 | Intuitive Surgical Operations, Inc. | Interface d'un actionneur avec un adaptateur d'instrument stérile |
| CN105611892B (zh) | 2013-08-15 | 2019-02-19 | 直观外科手术操作公司 | 机器人器械从动元件 |
| EP3079608B8 (fr) | 2013-12-11 | 2020-04-01 | Covidien LP | Ensemble poignet et mâchoires pour systèmes chirurgicaux robotiques |
| KR20240134217A (ko) | 2014-08-15 | 2024-09-06 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 가변 엔트리 가이드 구성을 가진 수술 시스템 |
| AU2016220501B2 (en) | 2015-02-19 | 2020-02-13 | Covidien Lp | Repositioning method of input device for robotic surgical system |
| US10357324B2 (en) | 2015-02-20 | 2019-07-23 | Stryker Corporation | Sterile barrier assembly, mounting system, and method for coupling surgical components |
| US10716639B2 (en) | 2015-03-10 | 2020-07-21 | Covidien Lp | Measuring health of a connector member of a robotic surgical system |
| WO2016201313A1 (fr) | 2015-06-11 | 2016-12-15 | Intuitive Surgical Operations, Inc. | Systèmes et procédés de mise en prise d'instrument |
| AU2016284040B2 (en) | 2015-06-23 | 2020-04-30 | Covidien Lp | Robotic surgical assemblies |
| US11197727B2 (en) | 2015-06-23 | 2021-12-14 | Covidien Lp | Robotic surgical assemblies |
| CN108024835B (zh) | 2015-09-25 | 2021-08-31 | 柯惠Lp公司 | 机器人外科手术组件及其器械驱动连接器 |
| EP3376988B1 (fr) | 2015-11-19 | 2023-08-23 | Covidien LP | Capteur de force optique pour système chirurgical robotique |
| US10779900B2 (en) | 2015-12-29 | 2020-09-22 | Covidien Lp | Robotic surgical systems and instrument drive assemblies |
| JP6945541B2 (ja) * | 2016-03-04 | 2021-10-06 | コヴィディエン リミテッド パートナーシップ | ロボット外科手術アセンブリ |
| WO2017173524A1 (fr) | 2016-04-07 | 2017-10-12 | Titan Medical Inc. | Procédé et appareil de positionnement de caméra pour capturer des images pendant une procédure médicale |
| AU2017269271B2 (en) * | 2016-05-26 | 2021-07-08 | Covidien Lp | Robotic surgical assemblies |
| CN107735040B (zh) | 2016-06-03 | 2021-06-18 | 柯惠Lp公司 | 用于机器人手术系统的控制臂 |
| US11612446B2 (en) | 2016-06-03 | 2023-03-28 | Covidien Lp | Systems, methods, and computer-readable program products for controlling a robotically delivered manipulator |
| WO2018013187A1 (fr) * | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Libération d'instrument |
| WO2018013298A1 (fr) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Actionnement à poignée à engrenage pour instruments médicaux |
| US11219497B2 (en) * | 2016-07-14 | 2022-01-11 | Intuitive Surgical Operations, Inc. | Surgical apparatus including a sterile adapter having mechanical lockouts |
| WO2018013309A1 (fr) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Dispositif médical télescopique et champ stérile. |
| US11020190B2 (en) | 2016-07-14 | 2021-06-01 | Intuitive Surgical Operations, Inc. | Automated instrument preload engage/disengage mechanism |
| US11559363B2 (en) | 2016-07-14 | 2023-01-24 | Intuitive Surgical Operations, Inc. | Controller controlled instrument preload mechanism |
| WO2018013316A1 (fr) | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Entraînement de rouleaux à engrenages pour instrument médical |
| US10709511B2 (en) | 2016-08-16 | 2020-07-14 | Ethicon Llc | Control of jaw or clamp arm closure in concert with advancement of device |
| US10531929B2 (en) * | 2016-08-16 | 2020-01-14 | Ethicon Llc | Control of robotic arm motion based on sensed load on cutting tool |
| US10390895B2 (en) | 2016-08-16 | 2019-08-27 | Ethicon Llc | Control of advancement rate and application force based on measured forces |
| US20180125597A1 (en) * | 2016-11-04 | 2018-05-10 | Emily Gogarty | Sterile boundary between a robot and a surgical field |
| US10905513B2 (en) | 2016-12-20 | 2021-02-02 | Verb Surgical Inc. | Sensors for detecting sterile adapter and tool attachment for use in a robotic surgical system |
| AU2018221456A1 (en) | 2017-02-15 | 2019-07-11 | Covidien Lp | System and apparatus for crush prevention for medical robot applications |
| CN110650705B (zh) | 2017-05-24 | 2023-04-28 | 柯惠Lp公司 | 机器人系统中的电外科工具的存在检测 |
| US11839441B2 (en) | 2017-05-25 | 2023-12-12 | Covidien Lp | Robotic surgical system with automated guidance |
| EP3678572A4 (fr) | 2017-09-05 | 2021-09-29 | Covidien LP | Algorithmes de gestion des collisions pour systèmes chirurgicaux robotiques |
| JP2020533061A (ja) | 2017-09-06 | 2020-11-19 | コヴィディエン リミテッド パートナーシップ | 手術ロボットの境界スケーリング |
| US11160606B2 (en) * | 2017-10-31 | 2021-11-02 | Covidien Lp | Systems and methods for lung treatments and post-treatment sealing of lungs |
| WO2019108437A2 (fr) * | 2017-11-29 | 2019-06-06 | Covidien Lp | Systèmes chirurgicaux robotiques, ensembles d'entraînement d'instrument et ensembles d'entraînement |
| JP6427253B1 (ja) * | 2017-12-12 | 2018-11-21 | 株式会社A−Traction | ロボット制御用医療器具、ドレープアダプタ及び手術支援システム |
| US11779416B2 (en) | 2018-01-04 | 2023-10-10 | Covidien Lp | Robotic surgical systems and instrument drive assemblies |
| CN111556735A (zh) | 2018-01-04 | 2020-08-18 | 柯惠Lp公司 | 将手术配件安装至机器人手术系统并且提供穿过其的通路的系统和组件 |
| EP4115840A1 (fr) * | 2018-01-09 | 2023-01-11 | Covidien LP | Module d'interface stérile pour ensembles chirurgicaux robotisés |
| EP3737326B1 (fr) | 2018-01-10 | 2024-10-16 | Covidien LP | Détermination de positions et d'états d'outils d'un système chirurgical robotique au moyen d'une vision informatique |
| US12102403B2 (en) | 2018-02-02 | 2024-10-01 | Coviden Lp | Robotic surgical systems with user engagement monitoring |
| US11497567B2 (en) | 2018-02-08 | 2022-11-15 | Intuitive Surgical Operations, Inc. | Jointed control platform |
| US11118661B2 (en) | 2018-02-12 | 2021-09-14 | Intuitive Surgical Operations, Inc. | Instrument transmission converting roll to linear actuation |
| JP7069334B2 (ja) | 2018-03-29 | 2022-05-17 | コヴィディエン リミテッド パートナーシップ | ロボット手術システムおよび器具駆動アセンブリ |
| US11986261B2 (en) | 2018-04-20 | 2024-05-21 | Covidien Lp | Systems and methods for surgical robotic cart placement |
| JP7316762B2 (ja) | 2018-04-27 | 2023-07-28 | 川崎重工業株式会社 | 外科手術システム及び外科手術システムの制御方法 |
| JP7085400B2 (ja) | 2018-04-27 | 2022-06-16 | 川崎重工業株式会社 | 外科手術システム |
| JP7085401B2 (ja) | 2018-04-27 | 2022-06-16 | 川崎重工業株式会社 | 外科手術システム |
| WO2020009830A1 (fr) | 2018-07-03 | 2020-01-09 | Covidien Lp | Systèmes, procédés et supports lisibles par ordinateur pour détecter une dégradation d'image pendant des interventions chirurgicales |
| EP3826566A4 (fr) | 2018-07-26 | 2022-08-10 | Covidien LP | Systèmes robotiques chirurgicaux |
| US11998288B2 (en) | 2018-09-17 | 2024-06-04 | Covidien Lp | Surgical robotic systems |
| CN111166488B (zh) * | 2018-11-13 | 2024-09-24 | 重庆金山医疗机器人有限公司 | 外科手术辅助机器人器械系统 |
| CN113316431B (zh) | 2018-12-04 | 2024-09-20 | 马科外科公司 | 用于联接外科部件的具有无菌屏障组件的安装系统 |
| US11576733B2 (en) | 2019-02-06 | 2023-02-14 | Covidien Lp | Robotic surgical assemblies including electrosurgical instruments having articulatable wrist assemblies |
| US10881478B1 (en) | 2019-06-26 | 2021-01-05 | Titan Medical Inc. | Methods for protecting robotic surgery systems with sterile barriers |
| JP7474435B2 (ja) | 2020-03-06 | 2024-04-25 | 小野 典子 | スライダ装置および手摺装置 |
| USD963851S1 (en) | 2020-07-10 | 2022-09-13 | Covidien Lp | Port apparatus |
| GB2597699B (en) | 2020-07-30 | 2022-10-12 | Saab Seaeye Ltd | Tool attachment, tool changer and corresponding method of use |
| EP4264231A1 (fr) * | 2020-12-16 | 2023-10-25 | Singular Genomics Systems, Inc. | Système d'imagerie cinématique |
| US11948226B2 (en) | 2021-05-28 | 2024-04-02 | Covidien Lp | Systems and methods for clinical workspace simulation |
| CN113349937A (zh) * | 2021-07-14 | 2021-09-07 | 深圳康诺思腾科技有限公司 | 一种手术机器人的器械驱动传动机构及装配机构 |
| CN113349935A (zh) * | 2021-07-14 | 2021-09-07 | 深圳康诺思腾科技有限公司 | 器械驱动器与无菌适配器的传动连接结构和手术机器人 |
| CN114533268A (zh) * | 2021-09-13 | 2022-05-27 | 广西大学 | 一种无菌适配器与动力输出部分 |
| CN116557445B (zh) * | 2023-07-10 | 2023-09-22 | 科弛医疗科技(北京)有限公司 | 一种适配器、器械驱动组件及驱动连接方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6494662B1 (en) * | 1999-04-27 | 2002-12-17 | Compagnie Generale De Participations | Device for remote control of the movement of gripping elements |
| WO2010081050A1 (fr) * | 2009-01-12 | 2010-07-15 | Hansen Medical, Inc. | Interfaces modulaires et actionnement d'entraînement à travers une barrière |
| US20120118917A1 (en) * | 2010-11-15 | 2012-05-17 | Michael Naughton | Powered dispensing tool |
Family Cites Families (160)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US793510A (en) | 1905-03-27 | 1905-06-27 | Stuart W Cramer | Machine for dyeing, &c. |
| US3596498A (en) | 1968-12-27 | 1971-08-03 | Textron Inc | Press |
| US4117359A (en) | 1974-01-30 | 1978-09-26 | Teldix Gmbh | Bearing and drive structure for spinning turbine |
| FR2434685A1 (fr) | 1978-09-04 | 1980-03-28 | Commissariat Energie Atomique | Manipulateur motorise |
| US4281447A (en) | 1979-03-01 | 1981-08-04 | Mcdonnell Douglas Corporation | Detachable tool interface system for a robot |
| US4259876A (en) | 1979-10-02 | 1981-04-07 | Belyanin Petr N | Mechanical arm |
| US4724713A (en) | 1985-11-01 | 1988-02-16 | Federal Products Corp. | Drive system for air bearing machines |
| US4696524A (en) * | 1986-03-03 | 1987-09-29 | Custom Tool & Mfg. Co. | Robot arm coupling apparatus |
| DE3762360D1 (de) | 1986-09-24 | 1990-05-23 | Siemens Ag | Getriebeanordnung, insbesondere fuer kraftfahrzeug-fensterheberantriebe. |
| US4911399A (en) | 1989-06-06 | 1990-03-27 | Anglo-American, Inc. | Cam valve for regulation of fluid flow through flexible tubing |
| JPH06114000A (ja) | 1992-09-30 | 1994-04-26 | Olympus Optical Co Ltd | 医療用マニピュレータ |
| ES2114405B1 (es) | 1994-08-11 | 1999-02-16 | Daumal Castellon Melchor | Sistema de fijacion rapido. |
| US5528955A (en) | 1994-09-08 | 1996-06-25 | Hannaford; Blake | Five axis direct-drive mini-robot having fifth actuator located at non-adjacent joint |
| US5814038A (en) | 1995-06-07 | 1998-09-29 | Sri International | Surgical manipulator for a telerobotic system |
| DE19541458C1 (de) | 1995-11-07 | 1997-03-06 | Siemens Ag | Flexibler Aktor |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US5792135A (en) | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US8206406B2 (en) * | 1996-12-12 | 2012-06-26 | Intuitive Surgical Operations, Inc. | Disposable sterile surgical adaptor |
| US7666191B2 (en) * | 1996-12-12 | 2010-02-23 | Intuitive Surgical, Inc. | Robotic surgical system with sterile surgical adaptor |
| US7699855B2 (en) | 1996-12-12 | 2010-04-20 | Intuitive Surgical Operations, Inc. | Sterile surgical adaptor |
| US7727244B2 (en) | 1997-11-21 | 2010-06-01 | Intuitive Surgical Operation, Inc. | Sterile surgical drape |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| JP3578375B2 (ja) | 1997-03-17 | 2004-10-20 | 技術研究組合医療福祉機器研究所 | ロボットアーム駆動装置およびロボットハンド |
| US6139245A (en) | 1997-07-11 | 2000-10-31 | Brooks Automation Inc. | Robot arm relocation system |
| US20020087048A1 (en) | 1998-02-24 | 2002-07-04 | Brock David L. | Flexible instrument |
| US6459926B1 (en) | 1998-11-20 | 2002-10-01 | Intuitive Surgical, Inc. | Repositioning and reorientation of master/slave relationship in minimally invasive telesurgery |
| US6394998B1 (en) | 1999-01-22 | 2002-05-28 | Intuitive Surgical, Inc. | Surgical tools for use in minimally invasive telesurgical applications |
| US6829455B2 (en) | 2000-10-20 | 2004-12-07 | Canon Kabushiki Kaisha | Driving force transmission mechanism, image forming apparatus equipped with such a mechanism, and process unit of such an apparatus |
| JP2002200091A (ja) | 2000-12-27 | 2002-07-16 | Mizuho Co Ltd | 手術器械操作における駆動ワイヤーの緩み補正機構 |
| US20020096885A1 (en) | 2001-01-22 | 2002-07-25 | Benito Gomez | Pinion assembly |
| US6994708B2 (en) | 2001-04-19 | 2006-02-07 | Intuitive Surgical | Robotic tool with monopolar electro-surgical scissors |
| DE10119334C1 (de) * | 2001-04-20 | 2002-03-14 | Porsche Ag | Reibungskupplung |
| US6817974B2 (en) | 2001-06-29 | 2004-11-16 | Intuitive Surgical, Inc. | Surgical tool having positively positionable tendon-actuated multi-disk wrist joint |
| JP2003024336A (ja) | 2001-07-16 | 2003-01-28 | Hitachi Ltd | 術具装置 |
| JP4776823B2 (ja) | 2001-07-23 | 2011-09-21 | Hoya株式会社 | ギヤバックラッシ除去機構及びモータ駆動装置 |
| US7428855B2 (en) | 2002-05-22 | 2008-09-30 | Duval Eugene F | Counter balance system and method with one or more mechanical arms |
| AT413420B (de) | 2002-06-07 | 2006-02-15 | Techmo Entw & Vertriebs Gmbh | Verfahren und anordnung zum raschen verbinden und lösen von miteinander verbindbaren elementen |
| CN2573759Y (zh) | 2002-08-20 | 2003-09-17 | 樊明月 | 皮带轮的离合装置 |
| US7331967B2 (en) | 2002-09-09 | 2008-02-19 | Hansen Medical, Inc. | Surgical instrument coupling mechanism |
| JP3680050B2 (ja) | 2002-09-18 | 2005-08-10 | 株式会社東芝 | 医療用マニピュレータ及びその制御方法 |
| EP1628632B1 (fr) | 2003-05-21 | 2013-10-09 | The Johns Hopkins University | Dispositifs et systemes permettant de realiser une chirurgie invasive minimale au niveau de la gorge et d'autres parties du corps de mammiferes |
| US9002518B2 (en) | 2003-06-30 | 2015-04-07 | Intuitive Surgical Operations, Inc. | Maximum torque driving of robotic surgical tools in robotic surgical systems |
| WO2005039835A1 (fr) | 2003-10-24 | 2005-05-06 | The University Of Western Ontario | Systeme de commande robotique a reflexion de force et dispositif chirurgical au minimum invasif |
| ITPI20030107A1 (it) | 2003-11-14 | 2005-05-15 | Massimo Bergamasco | Dispositivo per l'esecuzione di operazioni |
| US8052636B2 (en) | 2004-03-05 | 2011-11-08 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US8021326B2 (en) | 2004-03-05 | 2011-09-20 | Hansen Medical, Inc. | Instrument driver for robotic catheter system |
| JP2005288590A (ja) | 2004-03-31 | 2005-10-20 | Hiroshi Kinoshita | 多関節型マニピュレータ |
| US7377906B2 (en) | 2004-06-15 | 2008-05-27 | Biosense Webster, Inc. | Steering mechanism for bi-directional catheter |
| US9072535B2 (en) | 2011-05-27 | 2015-07-07 | Ethicon Endo-Surgery, Inc. | Surgical stapling instruments with rotatable staple deployment arrangements |
| JP4373879B2 (ja) | 2004-08-26 | 2009-11-25 | 株式会社日立製作所 | 手術器具 |
| US7763015B2 (en) | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| US7837674B2 (en) | 2005-01-24 | 2010-11-23 | Intuitive Surgical Operations, Inc. | Compact counter balance for robotic surgical systems |
| US8800838B2 (en) | 2005-08-31 | 2014-08-12 | Ethicon Endo-Surgery, Inc. | Robotically-controlled cable-based surgical end effectors |
| CN101340852B (zh) | 2005-12-20 | 2011-12-28 | 直观外科手术操作公司 | 机器人外科系统的器械对接装置 |
| WO2008054433A1 (fr) * | 2006-01-13 | 2008-05-08 | Borgwarner Inc. | Bloc d'embrayage et plaque de friction |
| EP1815950A1 (fr) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Dispositif chirurgical robotique pour effectuer des techniques opératoires minimalement invasive |
| JP5124096B2 (ja) | 2006-03-03 | 2013-01-23 | 川崎重工業株式会社 | 清潔空間用ロボットシステム |
| US7823330B2 (en) | 2006-03-09 | 2010-11-02 | Strattec Power Access Llc | Apparatus and method for drums in a sliding door mechanism |
| US20070225562A1 (en) | 2006-03-23 | 2007-09-27 | Ethicon Endo-Surgery, Inc. | Articulating endoscopic accessory channel |
| US20070232858A1 (en) | 2006-03-31 | 2007-10-04 | Boston Scientific Scimed, Inc. | Steering system tension control devices |
| US8597280B2 (en) * | 2006-06-13 | 2013-12-03 | Intuitive Surgical Operations, Inc. | Surgical instrument actuator |
| US8062211B2 (en) | 2006-06-13 | 2011-11-22 | Intuitive Surgical Operations, Inc. | Retrograde instrument |
| JP2009539509A (ja) | 2006-06-14 | 2009-11-19 | マクドナルド デットワイラー アンド アソシエイツ インコーポレーテッド | 直角プーリ駆動機構付きの手術マニピュレータ |
| US8151661B2 (en) | 2006-06-30 | 2012-04-10 | Intuituve Surgical Operations, Inc. | Compact capstan |
| US7736254B2 (en) | 2006-10-12 | 2010-06-15 | Intuitive Surgical Operations, Inc. | Compact cable tension tender device |
| EP1915963A1 (fr) | 2006-10-25 | 2008-04-30 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Estimation de la force pour un systeme d'intervention chirurgicale robotisée à effraction minimale |
| US8157793B2 (en) | 2006-10-25 | 2012-04-17 | Terumo Kabushiki Kaisha | Manipulator for medical use |
| US7935130B2 (en) * | 2006-11-16 | 2011-05-03 | Intuitive Surgical Operations, Inc. | Two-piece end-effectors for robotic surgical tools |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US9096033B2 (en) | 2007-06-13 | 2015-08-04 | Intuitive Surgical Operations, Inc. | Surgical system instrument sterile adapter |
| US8444631B2 (en) | 2007-06-14 | 2013-05-21 | Macdonald Dettwiler & Associates Inc | Surgical manipulator |
| US8224484B2 (en) | 2007-09-30 | 2012-07-17 | Intuitive Surgical Operations, Inc. | Methods of user interface with alternate tool mode for robotic surgical tools |
| WO2009079781A1 (fr) | 2007-12-21 | 2009-07-02 | Macdonald Dettwiler & Associates Inc. | Manipulateur chirurgical |
| US9179912B2 (en) | 2008-02-14 | 2015-11-10 | Ethicon Endo-Surgery, Inc. | Robotically-controlled motorized surgical cutting and fastening instrument |
| KR100975047B1 (ko) | 2008-02-15 | 2010-08-11 | (주)미래컴퍼니 | 수술용 인스트루먼트의 커플링 구조 |
| US8333755B2 (en) | 2008-03-31 | 2012-12-18 | Intuitive Surgical Operations, Inc. | Coupler to transfer controller motion from a robotic manipulator to an attached instrument |
| US7886743B2 (en) | 2008-03-31 | 2011-02-15 | Intuitive Surgical Operations, Inc. | Sterile drape interface for robotic surgical instrument |
| CN102014759B (zh) | 2008-06-11 | 2012-12-26 | 韩商未来股份有限公司 | 用于手术机器人臂的仪器 |
| US20140100558A1 (en) * | 2012-10-05 | 2014-04-10 | Gregory P. Schmitz | Micro-articulated surgical instruments using micro gear actuation |
| US9204923B2 (en) | 2008-07-16 | 2015-12-08 | Intuitive Surgical Operations, Inc. | Medical instrument electronically energized using drive cables |
| US8771270B2 (en) | 2008-07-16 | 2014-07-08 | Intuitive Surgical Operations, Inc. | Bipolar cautery instrument |
| US9386983B2 (en) | 2008-09-23 | 2016-07-12 | Ethicon Endo-Surgery, Llc | Robotically-controlled motorized surgical instrument |
| US9339342B2 (en) | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| US8720448B2 (en) * | 2008-11-07 | 2014-05-13 | Hansen Medical, Inc. | Sterile interface apparatus |
| US8161838B2 (en) | 2008-12-22 | 2012-04-24 | Intuitive Surgical Operations, Inc. | Method and apparatus for reducing at least one friction force opposing an axial force exerted through an actuator element |
| US8306656B1 (en) | 2009-01-12 | 2012-11-06 | Titan Medical Inc. | Method and system for performing medical procedure |
| JP2010220955A (ja) | 2009-03-25 | 2010-10-07 | Fujifilm Corp | 医療用マニピュレータ、及びその初期化方法 |
| KR101037069B1 (ko) | 2009-09-23 | 2011-05-26 | 주식회사 이턴 | 멸균 어댑터 |
| WO2011037394A2 (fr) * | 2009-09-23 | 2011-03-31 | 주식회사 이턴 | Adaptateur stérile, structure de fixation à roues, et structure de fixation d'un instrument chirurgical |
| CN107028660A (zh) * | 2009-09-23 | 2017-08-11 | 伊顿株式会社 | 无菌适配器、转轮联接结构以及手术用器械的联接结构 |
| NL1037348C2 (en) | 2009-10-02 | 2011-04-05 | Univ Eindhoven Tech | Surgical robot, instrument manipulator, combination of an operating table and a surgical robot, and master-slave operating system. |
| BR112012011435B1 (pt) | 2009-11-13 | 2020-06-23 | Intuitive Surgical Operations, Inc. | Mecanismo de instrumento cirúrgico, conjunto robótico de instrumento cirúrgico e sistema robótico de instrumento cirúrgico |
| US7752937B1 (en) | 2009-12-21 | 2010-07-13 | Winzeler Gear, Inc | Anti-backlash gear |
| US8887595B2 (en) | 2009-12-22 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Instrument wrist with cycloidal surfaces |
| US8449569B2 (en) | 2009-12-30 | 2013-05-28 | MiT Capital Partners, LLC | Apparatus for manipulation of implantable medical device and associated method |
| CN101797185B (zh) * | 2010-03-11 | 2011-06-01 | 上海交通大学 | 七自由度微创手术机械从手装置 |
| US8644988B2 (en) | 2010-05-14 | 2014-02-04 | Intuitive Surgical Operations, Inc. | Drive force control in medical instrument providing position measurements |
| AT508701B1 (de) | 2010-06-23 | 2011-05-15 | Miba Sinter Austria Gmbh | Zahnradanordnung |
| US8512199B2 (en) | 2010-07-26 | 2013-08-20 | Rethink Robotics, Inc. | Minimizing backlash utilizing series elastic elements |
| US8978511B2 (en) | 2010-11-09 | 2015-03-17 | Shimano Inc. | Position control mechanism |
| US9101379B2 (en) | 2010-11-12 | 2015-08-11 | Intuitive Surgical Operations, Inc. | Tension control in actuation of multi-joint medical instruments |
| US8578810B2 (en) | 2011-02-14 | 2013-11-12 | Intuitive Surgical Operations, Inc. | Jointed link structures exhibiting preferential bending, and related methods |
| US9259277B2 (en) | 2011-05-13 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Instrument actuation interface |
| US8978497B2 (en) | 2011-05-26 | 2015-03-17 | Tolomatic, Inc. | Linear actuator with anti-rotation mechanism |
| JP5879773B2 (ja) | 2011-06-30 | 2016-03-08 | 日産自動車株式会社 | カップリング装置 |
| JP6081061B2 (ja) | 2011-08-04 | 2017-02-15 | オリンパス株式会社 | 手術支援装置 |
| JP6000641B2 (ja) | 2011-08-04 | 2016-10-05 | オリンパス株式会社 | マニピュレータシステム |
| JP6005950B2 (ja) | 2011-08-04 | 2016-10-12 | オリンパス株式会社 | 手術支援装置及びその制御方法 |
| JP5936914B2 (ja) | 2011-08-04 | 2016-06-22 | オリンパス株式会社 | 操作入力装置およびこれを備えるマニピュレータシステム |
| JP6009840B2 (ja) | 2011-08-04 | 2016-10-19 | オリンパス株式会社 | 医療機器 |
| JP5841451B2 (ja) | 2011-08-04 | 2016-01-13 | オリンパス株式会社 | 手術器具およびその制御方法 |
| JP5931497B2 (ja) | 2011-08-04 | 2016-06-08 | オリンパス株式会社 | 手術支援装置およびその組立方法 |
| FR2984979B1 (fr) * | 2011-12-22 | 2017-01-27 | Valeo Materiaux De Friction | Dispositif de friction pour un embrayage |
| JP6165780B2 (ja) | 2012-02-10 | 2017-07-19 | エシコン・エンド−サージェリィ・インコーポレイテッドEthicon Endo−Surgery,Inc. | ロボット制御式の手術器具 |
| KR102638550B1 (ko) * | 2012-06-01 | 2024-02-21 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 하드웨어 제한형 원격 중심 로봇 매니퓰레이터용 여유 축 및 자유도 |
| BR112014032776B1 (pt) * | 2012-06-28 | 2021-09-08 | Ethicon Endo-Surgery, Inc | Sistema de instrumento cirúrgico e kit cirúrgico para uso com um sistema de instrumento cirúrgico |
| US9226751B2 (en) | 2012-06-28 | 2016-01-05 | Ethicon Endo-Surgery, Inc. | Surgical instrument system including replaceable end effectors |
| US9028494B2 (en) | 2012-06-28 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Interchangeable end effector coupling arrangement |
| JP6038589B2 (ja) | 2012-10-17 | 2016-12-07 | Ntn株式会社 | 直動案内装置 |
| US9095367B2 (en) | 2012-10-22 | 2015-08-04 | Ethicon Endo-Surgery, Inc. | Flexible harmonic waveguides/blades for surgical instruments |
| AU2014236718B2 (en) | 2013-03-14 | 2018-07-05 | Sri International | Compact robotic wrist |
| US9408669B2 (en) | 2013-03-15 | 2016-08-09 | Hansen Medical, Inc. | Active drive mechanism with finite range of motion |
| CN105611892B (zh) | 2013-08-15 | 2019-02-19 | 直观外科手术操作公司 | 机器人器械从动元件 |
| WO2015023834A1 (fr) | 2013-08-15 | 2015-02-19 | Intuitive Surgical Operations, Inc. | Éléments d'entraînement d'adaptateur stérile d'instrument |
| WO2015023730A1 (fr) | 2013-08-15 | 2015-02-19 | Intuitive Surgical Operations, Inc. | Interface d'instrument chirurgical préchargé |
| JP6426181B2 (ja) | 2013-08-15 | 2018-11-21 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 可変器具予荷重機構コントローラ |
| EP3033031B1 (fr) | 2013-08-15 | 2019-03-20 | Intuitive Surgical Operations, Inc. | Interface d'un actionneur avec un adaptateur d'instrument stérile |
| CN108784838B (zh) | 2013-08-15 | 2021-06-08 | 直观外科手术操作公司 | 器械无菌适配器驱动接口 |
| KR102324953B1 (ko) | 2014-03-17 | 2021-11-12 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 디스크 결합을 확인하는 시스템 및 방법 |
| US9839487B2 (en) | 2014-03-17 | 2017-12-12 | Intuitive Surgical Operations, Inc. | Backup latch release for surgical instrument |
| US20170127911A1 (en) | 2014-03-19 | 2017-05-11 | Endomaster Pte Ltd | Master - slave flexible robotic endoscopy system |
| US20150272580A1 (en) | 2014-03-26 | 2015-10-01 | Ethicon Endo-Surgery, Inc. | Verification of number of battery exchanges/procedure count |
| KR20240134217A (ko) | 2014-08-15 | 2024-09-06 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 가변 엔트리 가이드 구성을 가진 수술 시스템 |
| JP6433595B2 (ja) * | 2014-12-11 | 2018-12-05 | タイタン メディカル インコーポレイテッドTitan Medical Inc. | 工具装置、駆動装置および工具装置を作動させるための方法 |
| EP3232973B1 (fr) * | 2014-12-19 | 2020-04-01 | DistalMotion SA | Interface stérile pour instruments chirurgicaux articulés |
| EP3294184B1 (fr) | 2015-05-11 | 2023-07-12 | Covidien LP | Unité d'entraînement d'instrument d'accouplement et instrument chirurgical robotique |
| JP6141569B2 (ja) | 2015-06-01 | 2017-06-07 | オリンパス株式会社 | 医療用マニピュレータ |
| WO2016205288A1 (fr) | 2015-06-19 | 2016-12-22 | Covidien Lp | Ensembles chirurgicaux robotiques |
| US10667877B2 (en) | 2015-06-19 | 2020-06-02 | Covidien Lp | Controlling robotic surgical instruments with bidirectional coupling |
| CA2987643A1 (fr) | 2015-06-19 | 2016-12-22 | Covidien Lp | Ensembles chirurgicaux robotiques |
| CN113229942A (zh) | 2015-09-09 | 2021-08-10 | 奥瑞斯健康公司 | 手术器械装置操纵器 |
| GB201521809D0 (en) | 2015-12-10 | 2016-01-27 | Cambridge Medical Robotics Ltd | Symmetrically arranged surgical instrument articulation |
| DE102016111737A1 (de) * | 2016-06-27 | 2017-12-28 | avateramedical GmBH | Instrumententrägervorrichtung für einen Manipulator eines robotischen Operationssystems |
| US11219497B2 (en) | 2016-07-14 | 2022-01-11 | Intuitive Surgical Operations, Inc. | Surgical apparatus including a sterile adapter having mechanical lockouts |
| WO2018013354A1 (fr) * | 2016-07-14 | 2018-01-18 | Intuitive Surgical Operations, Inc. | Instruments chirurgicaux munis d'éléments d'actionnement électriquement isolés, dispositifs associés et procédés associés |
| US11559363B2 (en) | 2016-07-14 | 2023-01-24 | Intuitive Surgical Operations, Inc. | Controller controlled instrument preload mechanism |
| US10660651B2 (en) | 2016-10-31 | 2020-05-26 | Covidien Lp | Endoscopic reposable surgical clip applier |
| US10398460B2 (en) * | 2016-12-20 | 2019-09-03 | Ethicon Llc | Robotic endocutter drivetrain with bailout and manual opening |
| US10959744B2 (en) | 2017-10-30 | 2021-03-30 | Ethicon Llc | Surgical dissectors and manufacturing techniques |
| EP3723655A4 (fr) | 2017-12-11 | 2021-09-08 | Auris Health, Inc. | Systèmes et procédés pour des architectures d'insertion à base d'instrument |
| US10743868B2 (en) * | 2017-12-21 | 2020-08-18 | Ethicon Llc | Surgical instrument comprising a pivotable distal head |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US20190201146A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Safety systems for smart powered surgical stapling |
| JP7366943B2 (ja) | 2018-06-27 | 2023-10-23 | オーリス ヘルス インコーポレイテッド | 医療器具のための位置合わせ及び取り付けシステム |
| DE102018115435A1 (de) * | 2018-06-27 | 2020-01-02 | avateramedical GmBH | Trokarhalterung |
| US10531883B1 (en) | 2018-07-20 | 2020-01-14 | Syntheon 2.0, LLC | Aspiration thrombectomy system and methods for thrombus removal with aspiration catheter |
| WO2020069080A1 (fr) | 2018-09-28 | 2020-04-02 | Auris Health, Inc. | Dispositifs, systèmes et méthodes d'entraînement manuel et robotique d'instruments médicaux |
| JP6831415B2 (ja) * | 2019-03-28 | 2021-02-17 | 株式会社メディカロイド | アダプタ |
-
2014
- 2014-08-14 WO PCT/US2014/051033 patent/WO2015023834A1/fr active Application Filing
- 2014-08-14 JP JP2016534832A patent/JP6513670B2/ja active Active
- 2014-08-14 KR KR1020167006762A patent/KR102312595B1/ko active IP Right Grant
- 2014-08-14 US US14/911,514 patent/US10271911B2/en active Active
- 2014-08-14 CN CN201910034292.3A patent/CN109602495B/zh active Active
- 2014-08-14 CN CN201480055209.6A patent/CN105611894B/zh active Active
- 2014-08-14 EP EP14836832.7A patent/EP3033035B1/fr active Active
-
2019
- 2019-04-08 US US16/377,988 patent/US10993773B2/en active Active
- 2019-04-10 JP JP2019074699A patent/JP7145808B2/ja active Active
- 2019-04-10 JP JP2019074698A patent/JP2019111414A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6494662B1 (en) * | 1999-04-27 | 2002-12-17 | Compagnie Generale De Participations | Device for remote control of the movement of gripping elements |
| WO2010081050A1 (fr) * | 2009-01-12 | 2010-07-15 | Hansen Medical, Inc. | Interfaces modulaires et actionnement d'entraînement à travers une barrière |
| US20120118917A1 (en) * | 2010-11-15 | 2012-05-17 | Michael Naughton | Powered dispensing tool |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190231455A1 (en) | 2019-08-01 |
| CN105611894A (zh) | 2016-05-25 |
| EP3033035A4 (fr) | 2017-07-12 |
| CN109602495B (zh) | 2021-05-11 |
| US10993773B2 (en) | 2021-05-04 |
| KR102312595B1 (ko) | 2021-10-15 |
| CN109602495A (zh) | 2019-04-12 |
| US10271911B2 (en) | 2019-04-30 |
| JP2016530004A (ja) | 2016-09-29 |
| WO2015023834A1 (fr) | 2015-02-19 |
| CN105611894B (zh) | 2019-02-15 |
| JP6513670B2 (ja) | 2019-05-15 |
| JP2019111414A (ja) | 2019-07-11 |
| JP2019107548A (ja) | 2019-07-04 |
| EP3033035A1 (fr) | 2016-06-22 |
| KR20160044525A (ko) | 2016-04-25 |
| JP7145808B2 (ja) | 2022-10-03 |
| US20160199138A1 (en) | 2016-07-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10993775B2 (en) | Robotic instrument driven element | |
| US11793587B2 (en) | Preloaded surgical instrument interface | |
| US11090124B2 (en) | Instrument sterile adapter drive interface | |
| US10993773B2 (en) | Instrument sterile adapter drive features | |
| EP3033032B1 (fr) | Unité de commande de mécanisme de préchargement d'instrument variable | |
| EP3033031B1 (fr) | Interface d'un actionneur avec un adaptateur d'instrument stérile |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20160217 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAX | Request for extension of the european patent (deleted) | ||
| A4 | Supplementary search report drawn up and despatched |
Effective date: 20170609 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B25J 19/00 20060101ALI20170602BHEP Ipc: A61B 34/30 20160101ALI20170602BHEP Ipc: A61B 90/00 20160101AFI20170602BHEP Ipc: A61B 17/00 20060101ALI20170602BHEP Ipc: A61B 34/00 20160101ALI20170602BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20190723 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20200224 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTC | Intention to grant announced (deleted) | ||
| INTG | Intention to grant announced |
Effective date: 20200716 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602014072756 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1337393 Country of ref document: AT Kind code of ref document: T Effective date: 20201215 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1337393 Country of ref document: AT Kind code of ref document: T Effective date: 20201125 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20201125 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210226 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210225 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210325 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210225 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210325 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602014072756 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| 26N | No opposition filed |
Effective date: 20210826 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210831 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20210814 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210831 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210325 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210814 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210814 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210814 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210831 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140814 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230510 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201125 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240828 Year of fee payment: 11 |