EP2749194A2 - Nettoyeur automatique - Google Patents
Nettoyeur automatique Download PDFInfo
- Publication number
- EP2749194A2 EP2749194A2 EP13199543.3A EP13199543A EP2749194A2 EP 2749194 A2 EP2749194 A2 EP 2749194A2 EP 13199543 A EP13199543 A EP 13199543A EP 2749194 A2 EP2749194 A2 EP 2749194A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- operable member
- automatic cleaner
- driving part
- casing
- side brush
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005540 biological transmission Effects 0.000 claims description 85
- 230000002159 abnormal effect Effects 0.000 claims description 6
- 238000004140 cleaning Methods 0.000 description 26
- 239000000126 substance Substances 0.000 description 18
- 238000000034 method Methods 0.000 description 10
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/02—Floor surfacing or polishing machines
- A47L11/10—Floor surfacing or polishing machines motor-driven
- A47L11/14—Floor surfacing or polishing machines motor-driven with rotating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/02—Floor surfacing or polishing machines
- A47L11/20—Floor surfacing or polishing machines combined with vacuum cleaning devices
- A47L11/204—Floor surfacing or polishing machines combined with vacuum cleaning devices having combined drive for brushes and for vacuum cleaning
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
- A47L9/0427—Gearing or transmission means therefor
- A47L9/0433—Toothed gearings
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
- A47L9/0427—Gearing or transmission means therefor
- A47L9/0444—Gearing or transmission means therefor for conveying motion by endless flexible members, e.g. belts
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
- A47L9/0455—Bearing means therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
- A47L9/0461—Dust-loosening tools, e.g. agitators, brushes
- A47L9/0488—Combinations or arrangements of several tools, e.g. edge cleaning tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2847—Surface treating elements
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
Definitions
- cleaner are home appliances that suction foreign substances on the floor surface to remove the foreign substances from the floor surface.
- cleaners for automatically performing cleaning among the cleaners are called automatic cleaners.
- Such an automatic cleaner may suction foreign substances on the floor surface to remove the foreign substances while moving by driving force of a motor that operates by a rechargeable battery.
- a moving device is installed on a casing that defines an exterior of a general automatic cleaner. Also, the automatic cleaner suctions foreign substances on the floor surface while moving in a predetermined direction by the moving device. For this, a suction hole for suctioning the foreign substances on the floor surface is formed in a bottom surface of the casing. Also, a main brush that directly contacts the foreign substances to suction the foreign substances through the suction hole may be disposed on the suction hole.
- the automatic cleaner may suction only foreign substances existing in a region that corresponds to a lower side of the casing, substantially, a region that corresponds to a lower side of the suction hole.
- the cleaning may not be completely performed.
- a side brush may be disposed on the bottom surface of the casing. At least one portion of the side brush extends to the outside of the casing.
- the side brush may rotate with respect to the casing to sweep foreign substances in a region corresponding to the outside of the casing, substantially, the suction hole toward the suction hole.
- the automatic cleaner according to the related art may have following limitations.
- the side brush may rotate to suction the foreign substances in the region corresponding to the outside of the suction hole through the suction hole.
- a region to be cleaned by the automatic cleaner may substantially increase.
- the side brush may be damaged during the cleaning or the storage of the side brush.
- a region occupied by the automatic cleaner may increase. As a result, the automatic cleaner may be inconvenient in storage.
- an automatic cleaner includes: a casing having a suction hole; a main brush disposed on a side of the suction hole within the casing; and a first driving part arranged to rotate the main brush; characterized in that the automatic cleaner further comprising: an operable member movably disposed on the casing; a second driving part arranged to generate power for moving the operable member; a side brush rotatably disposed on the operable member to receive power of the first driving part; and a control part arranged to control the first and second driving parts.
- the control part turns the second driving part after turning the second driving part on.
- the control part turns the first driving part on in a normal mode, and when an obstacle is sensed, the control part additionally turns the second driving part on.
- the automatic cleaner further comprises a sensing part arranged to sense the movement of the operable member, wherein the control part controls the second driving part so that the operable member moves in one direction when the obstacle is sensed, and when an abnormal operation of the operable member is sensed by the sensing part after the second driving part is turned on, the control part controls the second driving part so that the operable member moves in the other direction.
- the automatic cleaner further comprises a moving unit disposed on the casing to move the casing; and a sensing part arranged to sense the movement of the operable member, wherein the control part controls the second driving part so that the operable member moves in one direction when the obstacle is sensed, and when an abnormal operation of the operable member is sensed by the sensing part after the second driving part is turned on, the control part controls the moving unit so that the automatic cleaner evades the obstacle.
- the automatic cleaner further comprises a first power transmission part arranged to transmit the power of the first driving part into the main brush; a second power transmission part arranged to transmit the power of the second driving part into the operable member; and a third power transmission part arranged to transmit the rotation force of the main brush into the side brush.
- the automatic cleaner further comprises a first power transmission part arranged to transmit the power of the first driving part into the main brush; a second power transmission part arranged to transmit the power of the second driving part into the operable member; and a third power transmission part arranged to transmit the power of the first driving part into the side brush.
- the automatic cleaner further comprises an additional side brush rotatably disposed on the casing; and a fourth power transmission part arranged to transmit the power of the first driving part into the additional side brush.
- the automatic cleaner further comprises an additional side brush rotatably disposed on the casing; and a fourth power transmission part arranged to transmit the rotation force of the main brush into the additional side brush.
- the automatic cleaner further comprises a rotation range restriction part arranged to restrict a rotation range of the operable member.
- the rotation range restriction part comprises a portion of components of the second power transmission part or a sensing part arranged to sense the rotation of the operable member.
- the operable member moves from a first position to a second position and then is stopped by the rotation range restriction part.
- the operable member is reciprocated between a first position and a second position by the rotation range restriction part.
- the operable member moves within a range of a first position to a second position and be stopped at a predetermined position between the first and second positions by the rotation range restriction part.
- an automatic cleaner in another embodiment, includes: a casing having a suction hole; a moving unit disposed on the casing to move the casing; an operable member movably disposed on the casing; a side brush rotatably disposed on the operable member; a first driving part arranged to generate power for moving the side brush; a second driving part arranged to generate power for moving the operable member; a sensing part arranged to sense the movement of the operable member; and a control part arranged to control the second driving part on the basis of information sensed by the sensing part.
- the control part may control the second driving part so that the operable member moves in one direction when the corner is sensed, and when an abnormal operation of the operable member is sensed by the sensing part after the second driving part is turned on, the control part may control the second driving part so that the operable member moves in the other direction.
- the control part may control the second driving part so that the operable member moves in one direction when the corner is sensed, and when an abnormal operation of the operable member is sensed by the sensing part after the second driving part is turned on, the control part may control the moving unit so that the automatic cleaner evades the corner.
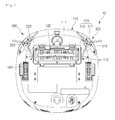
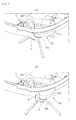
- Fig. 1 is a bottom surface of an automatic cleaner according to an embodiment
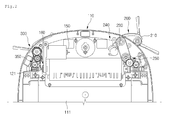
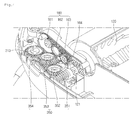
- Fig. 2 is a view of a state in which a cover of the automatic cleaner is separated according to an embodiment
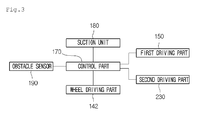
- Fig. 3 is a block diagram of the automatic cleaner according to an embodiment.
- an automatic cleaner 10 includes a casing 110 defining an exterior thereof.
- the casing 110 has a flat polyhedral shape, the present disclosure is not limited to the shape of the casing 110.
- a suction unit 180 for suctioning foreign substances and a dust collection unit (not shown) for collecting the suctioned foreign substances may be disposed within the casing 110.
- the casing 110 may include a base 111 and a cover (not shown) coupled to an upper portion of the base 111.
- a suction hole 112 is defined in a bottom surface of the casing 110.
- the suction hole 112 may serve as an inlet for suctioning foreign substances into the casing 110, substantially, the dust collection unit by using the suction unit 180.
- the suction hole 112 may be formed by cutting a portion of the bottom surface of the casing 110.
- a main brush 120 is disposed at a position corresponding to the suction hole 112 within the casing 110.
- the main brush 120 may pass through the suction hole 112 to contact the foreign substances on the floor surface, thereby removing the foreign substances.
- the main brush 120 is rotatably disposed on the casing 110.
- a first driving part 150 generating driving force for rotating the main brush 120 is disposed on the casing 110.
- the power of the first driving part 150 may be transmitted into the main brush 120 by a first power transmission part 160.
- a moving unit for moving the casing 110 may be disposed on the casing 110.
- the moving unit may include a wheel driving part 142 disposed within the casing 110 and a plurality of wheels that rotate by the wheel driving part 142.
- the driving part 142 may include a motor having the same number as that of the wheels 140.
- the side brush assembles 200 and 300 may include a first side brush assembly 200 disposed on one side of a front portion of the casing 110 and a second side brush assembly 300 disposed on the other side of the front portion of the casing 110.
- the second side brush assembly 300 may be omitted in the current embodiment.
- Each of the side brush assembles 200 and 300 may suction foreign substances existing in a region corresponding to the outside of the suction hole 112 through the suction hole 112.
- the casing 110 may further include a second driving part 230 generating power for moving the operable member 210 and a second power transmission part 240 for transmitting the power of the second driving part 230 into the operable member 210.
- the casing 110 may further include a third power transmission part 250 for transmitting the rotation force of the main brush 120 into the first side brush 220.
- the first side brush 220 receives the power generated in the first driving part 150 to rotate, and the operable member 210 receives the power generated in the second driving part 230 to rotate.
- the casing 11 may further include a fourth power transmission part 350 for transmitting the rotation force of the main brush 120 into the second side brush 310.
- the fourth power transmission part 350 may also be omitted.
- the first power transmission part 160 and the fourth power transmission part 350 may be connected to a rotation shaft 121 of the main brush 120. Also, the third power transmission part 350 may be connected to the rotation shaft 121 of the main brush 120.
- the first and second side brushes 220 and 310 rotate together with the main brush 120. Also, when the second driving part 230 is turned on, the operable member 210 may move.
- the present disclosure is not limited thereto.
- the power of the first driving part 150 may be transmitted into the first side brush 220 through only the third power transmission part 250.
- the power of the first driving part 150 is transmitted into the second side brush 310 by the main brush 120 and the fourth power transmission part 350 in Fig. 2 , the present disclosure is not limited thereto.
- the power of the first driving part 150 may be transmitted into the second side brush 310 through only the fourth power transmission part 350.
- the automatic cleaner 10 may further include a control part 170 for controlling an overall operation thereof and an obstacle sensor 190 for sensing an obstacle.
- the control part 170 may control the wheel driving part 142 and the second driving part 230 on the basis of information sensed by the obstacle sensor 190.
- control part 170 may recognize an obstacle, e.g. a corner on the basis of the information sensed by the obstacle sensor 190.
- control part 170 may control an operation of the second driving part 230.
- An infrared sensor, an ultrasonic sensor, an optical sensor, and the like may be used as the obstacle sensor 190.
- the current embodiment is not limited to a kind or number of obstacle sensor. Also, since the obstacle sensor may be realized by known technologies, detailed descriptions thereof will be omitted.
- the first power transmission part 160 may include a plurality of gears 161, 162, 163, and 164.
- a gear, which initially receives the power, of the plurality of gears may be referred to as a driving gear
- at least one gear connected to the driving gear may be referred to as an intermediate gear
- a gear, which finally receives the power, of the plurality of gears may be referred to as a driven gear.
- the intermediate gear may be omitted.
- the gears for transmitting the power are not limited to kind thereof.
- the driven gear 164 of the plurality of gears 161 to 164 may be connected to the rotation shaft 121 of the main brush 160.
- the power of the first driving part 150 may be transmitted into the rotation shaft 121 of the main brush 120 by the plurality of gears 161 to 164 to rotate the main brush 120.
- the fourth power transmission part 350 may include a plurality of gears 351, 352, 353, and 354.
- the driven gear 351 of the plurality of gears 351 to 354 may be connected to the rotation shaft 121 of the main brush 120.
- the driving gear 351 may be directly connected to a rotation shaft of the first driving part 151 or may be connected to one of the plurality of gears 161 to 164 constituting the first power transmission part 160.
- Fig. 5 is a view of the second power transmission part and the third power transmission part according to an embodiment
- Fig. 6 is an exploded perspective view of the second power transmission part and the third power transmission part according to an embodiment
- Fig. 7 is a perspective view of a state in which the second power transmission part is connected to the operable member according to an embodiment.
- the second driving part 230 may be disposed on the casing 110.
- the second power transmission part 240 may include a first transmission member 241 connected to a rotation shaft 231 of the second driving part 230 and a second transmission member 248 connected to the first transmission member 241 and the operable member 210.
- the second transmission member 248 may be directly connected to the first transmission member 241 or indirectly connected to the first transmission member 241 by the other transmission member.
- a shaft connection part 243 connected to the rotation shaft 231 of the second driving part 230 may be disposed on the first transmission member 241.
- a first connection hinge 242 may be disposed on the first transmission member 241.
- the second transmission member 248 may be rotatably connected to the first connection hinge 242.
- the first connection hinge 242 may be disposed on the second transmission member 248, and the first transmission member 241 may be rotatably connected to the first connection hinge 242.
- a second connection hinge 211 may be disposed on the outside of the operable member 210. Also, the second transmission member 248 may be rotatably connected to the second connection hinge 211. For another example, the second connection hinge 211 may be disposed on the second transmission member 248, and the operable member 210 may be rotatably connected to the second connection hinge 211.
- a protrusion 245 may be disposed on the first transmission member 241.
- a plurality of slits 246A, 246B, and 246C may be disposed spaced apart from each other on the protrusion 245.
- the second driving part 230 When the second driving part 230 is turned on, the first transmission member 241 may rotate in one direction. As the first transmission member 241 rotates, the protrusion 245 may also rotate together with the first transmission member 241.
- the rotation of the protrusion 245 may be sensed by the sensing part 400.
- a photo interrupter sensor may be used as the sensing part 400.
- the current embodiment is not limited to a kind of sensing part 400. For example, various sensors such as a micro switch and the like may be applied to the current embodiment.
- the control part 170 may control the second driving part 230 on the basis of an output signal of the sensing part 400 according to the rotation of the protrusion 245.
- the operable member 210 may be limited in rotation range. That is, in the current embodiment, the sensing part 400 and the protrusion 245 may be referred to as rotation range restriction parts for restricting the rotation range of the operable member 210.
- the protrusion 245 may be disposed on the operable member 210. In this case, the operable member may be limited in rotation range on the basis of an output signal of the sensing part 400 according to the rotation of the operable member 210.
- the plurality of slits may include a first slit 246A, a second slit 246B, and at least one third slit 246C between the first and second slits 246A and 246B.
- an angle between the first and second slits 246A and 246B may be greater than that between the first and third slits 246A and 246C.
- a signal A is outputted from.
- a signal B different from the signal A may be outputted.
- the second driving unit 230 may be turned off.
- the sensing part 400 may be in a state of sensing the first slit 246A before the second driving part 230 is turned on.
- the protrusion 245 may rotate together with the first transmission member 241.
- the sensing part 400 senses the second slit 246B after sensing the third slit 246C during the rotation of the protrusion 245, the second driving part 230 may be turned off.
- the second driving part 230 may be turned off according to whether an obstacle exists at a corner, or a shape of the corner.
- a rotatable angle of the protrusion 245 may vary according to the number of slits 246A to 246C. That is, if a portion of the operable member 210 is referred to as a first position when the sensing part 400 senses the first slit 246A, and a position of the operable member 210 is referred to as a second position when the sensing part 400 senses the second slit 246B, the operable member 210 may move between the first position and the second position. Alternatively, the operable member 210 may be stopped at a point between the first and second positions. That is, the operable member 210 may be adjusted in rotation angle.
- the slits 246A to 246C may not be defined in the protrusion 245.
- a signal A may be outputted.
- a signal B may be outputted.
- a state before the second driving part 230 operates may be a state in which the sensing part 400 does not sense the protrusion 245.
- the protrusion 245 may rotate together with the first transmission member 241.
- the operable member 210 rotates in one direction (a first direction, i.e., a direction in which the operable member 210 is withdrawn from the casing) by the rotation of the first transmission member 241.
- the sensing part 400 senses the protrusion 245.
- the second driving part 230 may be turned off.
- Whether the operable member normally rotates may be determined by the protrusion 245 and the sensing part 400. This will be described later with reference to the accompanying drawings.
- a plurality of belts 256 and 262 may be further provided to reduce the number of gears.
- the driving gear 251 may be connected to a first intermediate gear 252, and the first intermediate gear 252 may be connected to a second intermediate gear 253.
- the second intermediate gear 253 may be connected to a third intermediate gear 254.
- the first belt 256 may connect the third intermediate gear 254 to the fourth intermediate gear 255.
- the driving gear 251, the first to fourth intermediate gears 252 to 255, and the first belt 256 may be disposed within gear housings 257 and 258.
- the fourth intermediate gear 255 may be coaxially connected to a fifth intermediate gear 260.
- the fifth intermediate gear 260 and the driven gear 261 may be connected to each other by the second belt 262.
- the driven gear 261 may be connected to the second side brush 220.
- the gear shaft of the driven gear 261 may serve as a rotation shaft of the second side brush 220, or the rotation shaft 223 of the second side brush 220 may be coupled to the driven gear 261.
- the fifth intermediate gear 260, the driven gear 261, and the second belt 262 may be disposed within the operable member 210. Also, the operable member 210 may further include a cover 212.
- a hole through which the fourth intermediate gear 255 passes may be defined in the cover 212.
- a connection part 213 rotatably connected to the gear housings 257 and 258 may be disposed around the hole 214 on the cover 212.
- the connection part 213 may serve as a rotation shaft of the operable member 210.
- Fig. 8 is a flowchart illustrating a method for controlling the automatic cleaner according to an embodiment
- Fig. 9 is a view illustrating an operation state of a first side brush assembly.
- Fig. 9A and 10A are views illustrating a state in which a first side brush assembly operates in a normal mode
- Figs. 9B and 10B are views illustrating a state in which the first side brush assembly operates in a corner cleaning mode.
- the automatic cleaner is turned on to clean a surface to be cleaned (for example, a floor surface) by using the automatic cleaner (S1).
- the automatic cleaner may automatically operate in a normal mode or operate in the normal mode by an input of a starting command (S2).
- the automatic cleaner performs cleaning while moving by the moving unit.
- the first driving part 150 In the normal mode, the first driving part 150 is turned on. When the first driving part 150 is turned on, the power of the first driving part 150 may be transmitted into the main brush 120 by the first power transmission part 160. Thus, the main brush 120 may rotate.
- the power of the first driving part 150 may be transmitted into the first side brush 220 by the third power transmission part 250 and transmitted into the second side brush 310 by the fourth power transmission part 350.
- the first and second side brushes 220 and 310 may rotate.
- the first side brush 220 rotates in a direction A.
- the control part 170 determines whether a corner is recognized (S3 and S4). In detail, the control part 170 determines whether the automatic cleaner 10 performs a wall following traveling (senses a wall) or whether a side obstacle is sensed (S3).
- the wall following traveling may represent that the automatic cleaner travels along the wall.
- Whether the wall following traveling is performed, or the side obstacle is sensed may be determined on the basis of information sensed by the obstacle sensor 190.
- the control part 170 may determine whether a front obstacle (or a front wall) is sensed (S4).
- the corner may correspond to a portion at which a plurality of planes (that is not limited thereto) meet each other, the control part 150 determines that the corner is sensed in the case where the wall or the side and front surfaces are sensed.
- control part 170 controls the automatic cleaner 10 so that the automatic cleaner 10 performs a corner cleaning mode (S5).
- the control part 170 turns the second driving part 230 on.
- the operable member 210 may move from the state (the first position) of Fig. 9A to the state (the second position) of Fig. 9B (may rotate).
- the rotation shaft 223 of the first side brush 220 may move in a horizontal direction.
- the second driving part 230 is turned off in a state where the operable member 210 rotates at a predetermined angle.
- an operation type of the first side brush assembly (or the operable member) in the normal mode is referred to as a first type
- an operation type (including a position and operation pattern) of the first side brush assembly (or the operable member) in the corner cleaning mode may be referred to as a second type.
- the first side brush assembly may be changed from the first type into the second type in the corner cleaning mode.
- the first transmission member 241 rotates.
- the first connection hinge 242 disposed on the first transmission member 241 may move.
- the second transmission member 248 may move, and thus, the second connection hinge 211 may move by the moving of the second transmission member 248. Therefore, the operable member 210 may rotate by the second connection hinge 211.
- the first type of the first side brush assembly may be in a state in which the operable member 210 is not withdrawn (i.e., the operable member 210 is disposed at the first position), and the second type of the first side brush assembly may be in a state in which the operable member 210 is withdrawn and then stopped (i.e., the operable member 210 is disposed at the second position).
- a portion of the operable member 210 may be disposed within the casing 110, and then, the operable member 210 may protrude to the outside of the casing 110 by the rotation thereof. That is, the operable member 210 may protrude to the outside of the case 110 by the rotation thereof from a state in which the operable member 210 overlaps the casing 110 as shown in Fig. 9A .
- a vertically overlapping area between the operable member 210 and the casing 110 may be reduced when compared to a state before the operable member 210 protrudes to the outside of the casing 110.
- the corner cleaning may be effectively performed.
- the second type of the first side brush assembly 200 may include a process in which the operable member 210 is repeatedly changed from the first position into the second position and from the second position into the first position. That is, the operable member 210 may repeatedly move between the first position and the second position.
- the second driving part 230 is turned on to operate in one direction and then is turned off. Then, the second driving part 230 is turned again on to operate in the other direction and then is turned off.
- the above-described processes may be repeatedly performed.
- the process in which the operable member 210 moves from the first position to the second position and then is stopped or moves from the second position to the first position may be achieved by the above-described sensing part 400 and the protrusion 245.
- the stopped state of the moving unit may be maintained in the corner cleaning mode.
- the control part 170 determines whether the corner is completely cleaned (S6). For example, it is determined that the corner is completely cleaned when a time at which the operation time of the first side brush assembly 200 is changed exceeds a reference time, the rotation number of the first side brush (or the second driving part) exceeds a reference number after the operation type of the first side brush assembly 200 is changed, an operation time of the second driving part exceeds a reference time, or the changed number of operation type exceeds a reference number.
- whether corner is completely cleaned may be determined on the basis of a sensor for sensing the cleaning state. For example, whether the corner is completely cleaned may be determined on the basis of images of the corner photographed by a camera or determined through an amount of dusts suctioned through the suction hole by using the sensor.
- the present disclosure is not limited to the methods for determining whether the corner is completely cleaned.
- the automatic cleaner 10 when it is determined that the corner is completely cleaned, the automatic cleaner 10 operates again in the normal mode. That is, the operation type of the first side brush assembly may be changed in the second type into the first type.
- the corner may be effectively cleaned by the first side brush assembly.
- damage of the first side brush and inconvenience in storage of the first side brush assembly may be prevented.
- Fig. 11 is a flowchart illustrating a method for controlling the automatic cleaner according to whether the first side brush normally rotates according to an embodiment.
- the automatic cleaner is turned on to clean a surface to be cleaned (for example, a floor surface) by using the automatic cleaner (S11).
- the automatic cleaner may automatically operate in a normal mode or operate in the normal mode by an input of a starting command (S12).
- the automatic cleaner performs cleaning while moving by the moving unit.
- the main brush 120 and the first and second side brushes 220 and 310 rotate.
- the control part 170 determines whether a corner is recognized (S13 and S14). In detail, the control part 170 determines whether the automatic cleaner 10 performs a wall following traveling (senses a wall surface) or whether a side obstacle is sensed (S13). The wall following traveling may represent that the automatic cleaner travels along the wall.
- Whether the wall following traveling is performed, or the side obstacle is sensed may be determined on the basis of information sensed by the obstacle sensor 190.
- the control part 170 may determine whether a front obstacle (or a front wall) is sensed (S14). In general, since the corner may correspond to a portion at which a plurality of planes (that is not limited thereto) meet each other, the control part 150 determines that the corner is sensed in the case where the wall or the side and front surfaces are sensed.
- control part 170 turns the second driving part 230 on (S15).
- the fist transmission member connected to the second driving part 230 may rotate.
- the first transmission member 241 rotates, since the protrusion 245 may rotate together with the first transmission member 241.
- the sensing part 400 may sense the rotation of the protrusion 245.
- the operable member 210 may also rotate.
- control part 170 determines whether the operable member 210 normally operates on the basis of information with respect to the protrusion 245 sensed by the sensing part 400 (S16).
- the sensing part 400 may sense a first slit 246A of the protrusion 245. This is done because the second driving part 230 is turned off in the state where the first slit 246A of the protrusion 245 is sensed. Then, when the second driving part 230 is turned on, since the protrusion 245 rotates, the sensing part 400 may not sense the first slit 246A. When the first slit 246A is continuously sensed, or the third or second slit 246C or 246B is not sensed until a predetermined time elapses after the second driving part 230 is turned on, the control part 170 may determine that the operable member 210 does not normally operate. On the other hand, when the second driving part 230 is turned on, and then the third or second slit 246C or 246C is sensed until a predetermined time elapses, the control part 170 may determine that the operable member 210 normally operates.
- the case in which the operable member 210 does not normally operate may be a case in which the power of the second driving part 230 is not smoothly transmitted into the operable member 210 through the second power transmission part 240 (an internal factor) or a case in which the operable member 210 does not rotate by an obstacle outside the automatic cleaner 10 even though the power of the second driving part 230 is smoothly transmitted into the operable member 210 through the second power transmission part 240.
- a state before the second driving part 230 is turned on may be a state in which the sensing part 40 does not sense the protrusion 245.
- the sensing part 245 may rotate and also sense the protrusion 245.
- the control part 170 may determine that the operable member 210 does not normally operate.
- the control part 170 determines whether the corner is completely cleaned (S18). For example, it is determined that the corner is completely cleaned when a time at which the operation time of the first side brush assembly 200 is changed exceeds a reference time, the rotation number of the first side brush (or the second driving part) exceeds a reference number after the operation type of the first side brush assembly 200 is changed, an operation time of the second driving part exceeds a reference time, or the changed number of operation type exceeds a reference number.
- whether corner is completely cleaned may be determined on the basis of a sensor for sensing the cleaning state. For example, whether the corner is completely cleaned may be determined on the basis of images of the corner photographed by a camera or determined through an amount of dusts suctioned through the suction hole by using the sensor.
- the present disclosure is not limited to the methods for determining whether the corner is completely cleaned.
- control part 170 determines again whether the operable member normally operates (S20). If the operable member 210 normally operates, the process proceeds to the operation S17 to perform corner cleaning.
- the control part 170 controls the wheel driving part 142 (the moving unit) so that the automatic cleaner 10 evades the corner (S21). For example, the automatic cleaner 10 may go into reverse from the present position and then be changed in direction to move away from the corner. Also, the control part 170 controls the second driving part 230 so that the operable member 210 is in the inserted state.
- error information may be displayed on a display unit (not shown). Also, information with respect to the position (the corner) at which an error occurs may be stored in a map of a memory (not shown).
- the automatic cleaner 10 operates again in the normal mode.
- the automatic cleaner 10 may move to the error occurrence position stored in the map when the cleaning is performed in the normal mode to perform the corner cleaning mode again.
- the corner cleaning performance may be improved.
- the error information is displayed when the corner cleaning is not performed, the user may confirm the state of the automatic cleaner or the corner state.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Nozzles For Electric Vacuum Cleaners (AREA)
- Electric Vacuum Cleaner (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120153102A KR101469333B1 (ko) | 2012-12-26 | 2012-12-26 | 자동 청소기 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2749194A2 true EP2749194A2 (fr) | 2014-07-02 |
| EP2749194A3 EP2749194A3 (fr) | 2018-03-14 |
| EP2749194B1 EP2749194B1 (fr) | 2018-11-14 |
Family
ID=49885066
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13199543.3A Not-in-force EP2749194B1 (fr) | 2012-12-26 | 2013-12-24 | Nettoyeur automatique |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP2749194B1 (fr) |
| KR (1) | KR101469333B1 (fr) |
| CN (1) | CN103892770B (fr) |
| AU (1) | AU2013270454B2 (fr) |
| RU (1) | RU2557509C2 (fr) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021107320A1 (fr) | 2019-11-29 | 2021-06-03 | Lg Electronics Inc. | Robot nettoyeur |
| US11284759B2 (en) * | 2020-03-30 | 2022-03-29 | Bissell Inc. | Edge cleaning brushes for floor cleaner |
| EP3995064A1 (fr) * | 2020-11-09 | 2022-05-11 | Miele & Cie. KG | Robot d'aspiration avec boîtier de connexion |
| US20230147162A1 (en) * | 2020-04-17 | 2023-05-11 | Lg Electronics Inc. | Robot cleaner |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015114883A1 (de) * | 2015-09-04 | 2017-03-09 | RobArt GmbH | Identifizierung und Lokalisierung einer Basisstation eines autonomen mobilen Roboters |
| CN107116559B (zh) * | 2017-03-31 | 2019-06-25 | 华北科技学院 | 一种墙角专用机器人吸尘装置 |
| CN113171040B (zh) * | 2021-04-25 | 2022-05-10 | 珠海格力电器股份有限公司 | 扫地机器人路径规划方法、装置、存储介质及扫地机器人 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4097264B2 (ja) * | 2003-06-18 | 2008-06-11 | 株式会社東芝 | 電気掃除機 |
| JP4201747B2 (ja) * | 2004-07-29 | 2008-12-24 | 三洋電機株式会社 | 自走式掃除機 |
| JP2006087507A (ja) * | 2004-09-21 | 2006-04-06 | Sanyo Electric Co Ltd | 自走式掃除機 |
| KR100704483B1 (ko) * | 2005-04-25 | 2007-04-09 | 엘지전자 주식회사 | 로봇청소기의 구석 청소 장치 |
| EP2816434A3 (fr) * | 2005-12-02 | 2015-01-28 | iRobot Corporation | Robot à couverture autonome |
| TWM294301U (en) * | 2005-12-27 | 2006-07-21 | Supply Internat Co Ltd E | Self-propelled vacuum cleaner with dust collecting structure |
| KR20070107956A (ko) * | 2006-05-04 | 2007-11-08 | 삼성전자주식회사 | 로봇청소기 |
| US20090044370A1 (en) * | 2006-05-19 | 2009-02-19 | Irobot Corporation | Removing debris from cleaning robots |
| KR101249864B1 (ko) * | 2007-10-01 | 2013-04-02 | 삼성전자주식회사 | 로봇청소기 |
| JP5243879B2 (ja) * | 2008-08-04 | 2013-07-24 | 富士重工業株式会社 | 清掃ロボットのサイドブラシ支持装置 |
| KR101492069B1 (ko) * | 2008-10-29 | 2015-02-11 | 삼성전자 주식회사 | 로봇청소기 및 그 제어방법 |
| EP3053502B2 (fr) * | 2009-06-30 | 2021-08-25 | LG Electronics Inc. | Robot nettoyeur |
| CN201573207U (zh) * | 2009-07-02 | 2010-09-08 | 泰怡凯电器(苏州)有限公司 | 清扫机器人的边刷控制系统 |
| CN102038470B (zh) * | 2009-10-09 | 2013-02-27 | 泰怡凯电器(苏州)有限公司 | 自移动地面处理机器人及其贴边地面处理的控制方法 |
| KR101484942B1 (ko) * | 2010-08-26 | 2015-01-22 | 삼성전자 주식회사 | 청소기 및 그 제어방법 |
| AU2011254078B2 (en) * | 2010-12-29 | 2014-05-22 | Bissell Inc. | Suction nozzle with obstacle sensor |
-
2012
- 2012-12-26 KR KR1020120153102A patent/KR101469333B1/ko active IP Right Grant
-
2013
- 2013-12-10 AU AU2013270454A patent/AU2013270454B2/en not_active Ceased
- 2013-12-23 RU RU2013157120/12A patent/RU2557509C2/ru not_active IP Right Cessation
- 2013-12-24 EP EP13199543.3A patent/EP2749194B1/fr not_active Not-in-force
- 2013-12-26 CN CN201310733993.9A patent/CN103892770B/zh active Active
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021107320A1 (fr) | 2019-11-29 | 2021-06-03 | Lg Electronics Inc. | Robot nettoyeur |
| EP4064950A4 (fr) * | 2019-11-29 | 2023-11-29 | LG Electronics Inc. | Robot nettoyeur |
| US11284759B2 (en) * | 2020-03-30 | 2022-03-29 | Bissell Inc. | Edge cleaning brushes for floor cleaner |
| US20220175204A1 (en) * | 2020-03-30 | 2022-06-09 | Bissell Inc. | Edge cleaning brushes for floor cleaner |
| US12035874B2 (en) * | 2020-03-30 | 2024-07-16 | Bissell Inc. | Edge cleaning brushes for floor cleaner |
| US20230147162A1 (en) * | 2020-04-17 | 2023-05-11 | Lg Electronics Inc. | Robot cleaner |
| EP3995064A1 (fr) * | 2020-11-09 | 2022-05-11 | Miele & Cie. KG | Robot d'aspiration avec boîtier de connexion |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2013157120A (ru) | 2015-06-27 |
| KR20140083402A (ko) | 2014-07-04 |
| KR101469333B1 (ko) | 2014-12-04 |
| AU2013270454B2 (en) | 2015-09-24 |
| RU2557509C2 (ru) | 2015-07-20 |
| CN103892770A (zh) | 2014-07-02 |
| EP2749194B1 (fr) | 2018-11-14 |
| AU2013270454A1 (en) | 2014-07-10 |
| CN103892770B (zh) | 2017-04-12 |
| EP2749194A3 (fr) | 2018-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2749194B1 (fr) | Nettoyeur automatique | |
| KR102021894B1 (ko) | 자동 청소기의 제어방법 | |
| US10271699B2 (en) | Autonomous cleaning device and wind path structure of same | |
| EP2574263B1 (fr) | Robot nettoyeur | |
| US9510720B2 (en) | Automatic cleaner | |
| WO2016056226A1 (fr) | Dispositif de nettoyage de type à déplacement autonome | |
| JP2007181660A (ja) | ロボット掃除システム | |
| JP6757575B2 (ja) | 自走式掃除機 | |
| JP6927661B2 (ja) | 電気掃除機 | |
| JP2017213009A (ja) | 自律走行型掃除機 | |
| EP3000368B1 (fr) | Robot nettoyeur | |
| WO2024139100A1 (fr) | Épurateur de nettoyage et dispositif de nettoyage automatisé | |
| JP6523636B2 (ja) | 走行体 | |
| JP6378984B2 (ja) | 自走式掃除機 | |
| KR101450972B1 (ko) | 자동 청소기 | |
| JP6685740B2 (ja) | 電気掃除機 | |
| CN115316889B (zh) | 自动清洁设备 | |
| JP2020099461A (ja) | 自律走行型掃除機 | |
| JP7282668B2 (ja) | 自律走行型掃除機 | |
| AU2022434150A1 (en) | Automatic cleaning apparatus and system | |
| JP2022163754A (ja) | 掃除機管理装置およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 17P | Request for examination filed |
Effective date: 20131224 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A47L 9/28 20060101AFI20180208BHEP Ipc: A47L 9/04 20060101ALI20180208BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: A47L 9/04 20060101ALI20180427BHEP Ipc: A47L 9/28 20060101AFI20180427BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20180528 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1063823 Country of ref document: AT Kind code of ref document: T Effective date: 20181115 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602013046601 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20181114 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1063823 Country of ref document: AT Kind code of ref document: T Effective date: 20181114 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190214 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190214 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190314 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190215 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190314 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602013046601 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181224 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20181231 |
|
| 26N | No opposition filed |
Effective date: 20190815 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190114 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181231 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181224 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181114 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20131224 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181114 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20221107 Year of fee payment: 10 Ref country code: DE Payment date: 20220615 Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602013046601 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20231224 |