EP1313575B1 - Gelenkarm-transportsystem - Google Patents
Gelenkarm-transportsystem Download PDFInfo
- Publication number
- EP1313575B1 EP1313575B1 EP01964901A EP01964901A EP1313575B1 EP 1313575 B1 EP1313575 B1 EP 1313575B1 EP 01964901 A EP01964901 A EP 01964901A EP 01964901 A EP01964901 A EP 01964901A EP 1313575 B1 EP1313575 B1 EP 1313575B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- pivoting arm
- pivoting
- arm part
- movement
- transporting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000012546 transfer Methods 0.000 claims abstract description 21
- 230000033001 locomotion Effects 0.000 claims description 50
- 230000005540 biological transmission Effects 0.000 claims description 7
- 230000001105 regulatory effect Effects 0.000 claims 2
- 238000003754 machining Methods 0.000 claims 1
- 238000013461 design Methods 0.000 abstract description 4
- 230000002349 favourable effect Effects 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000011161 development Methods 0.000 description 3
- 230000018109 developmental process Effects 0.000 description 3
- 241000239290 Araneae Species 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- RRLHMJHRFMHVNM-BQVXCWBNSA-N [(2s,3r,6r)-6-[5-[5-hydroxy-3-(4-hydroxyphenyl)-4-oxochromen-7-yl]oxypentoxy]-2-methyl-3,6-dihydro-2h-pyran-3-yl] acetate Chemical compound C1=C[C@@H](OC(C)=O)[C@H](C)O[C@H]1OCCCCCOC1=CC(O)=C2C(=O)C(C=3C=CC(O)=CC=3)=COC2=C1 RRLHMJHRFMHVNM-BQVXCWBNSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D—WORKING OR PROCESSING OF SHEET METAL OR METAL TUBES, RODS OR PROFILES WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D43/00—Feeding, positioning or storing devices combined with, or arranged in, or specially adapted for use in connection with, apparatus for working or processing sheet metal, metal tubes or metal profiles; Associations therewith of cutting devices
- B21D43/02—Advancing work in relation to the stroke of the die or tool
- B21D43/04—Advancing work in relation to the stroke of the die or tool by means in mechanical engagement with the work
- B21D43/05—Advancing work in relation to the stroke of the die or tool by means in mechanical engagement with the work specially adapted for multi-stage presses
Definitions
- the invention relates to a transport system for transporting workpieces from a processing station in the subsequent processing station or clipboard of a press, press line, a simulator or the like according to the preamble of claim 1.
- step press or press line for cost-effective production.
- the number of tools then corresponds to the number of work stages that are required for the production.
- the presses are transport facilities with which the workpieces are transported from one workstation to the next.
- the transport devices consist of gripper rails or mounting rails which extend through the entire length of the forming machine.
- the mounting rails are equipped with gripper or retaining elements.
- gripper or retaining elements are equipped with gripper or retaining elements.
- a pivoting to the change in position of the part during the transport step may be required.
- This change in position can also be done by an arranged between the forming stages Orientierstation.
- the masses of the transfer systems to be accelerated and braked are in complete contrast to the low masses of the parts to be transported. Since the transport step is to be carried out in the shortest possible time in order to achieve the highest possible number of press strokes and thus parts output, the system must have a high speed and thus acceleration and deceleration.
- each stand area is a transfer device disclosed in DE 196 544 75 A1.
- the drive elements known as -Parallelkinematik- are used.
- no telescopic extension of the drive rods is made, but at a constant rod length, the pivot points are changed, thus achieving the transport movements.
- the forces or torques receiving points of articulation are not constant at a distance to each other and especially if these points are close to each other due to the desired travel curve support problems may occur.
- further parallel control arms are proposed which are interconnected with crossbeams. To achieve a functionally safe transport of large parts, the proposed system is correspondingly complex and of great height.
- the invention has for its object to provide a highly flexible and precise transport system with low height, which ensures an advantageous use of the freedom between the upper and lower tool for the purpose of inserting and discharging workpieces.
- the invention is based on the idea, instead of a rigid transport arm to carry out this 2 parts which are hinged together, connected. To achieve a flat retraction and discharge curve, the pivot angle of the first arm can be selected correspondingly large.
- the swivel angle is selectable in any technically meaningful range.
- the transport arm is located in the tool area in a very flat, directed against the horizontal plane position.
- the articulated arm transport system should be in a lowered position in the stand area, which is given for the subsequent parts transport a favorable freedom of movement to the ramping ram. This freedom of movement allows early retraction and thus in turn reduces the non-productive time. This lowered park position is made possible by superposition of horizontal and vertical movement.
- the articulated-arm transport system is designed with an additional pivoting movement if required.
- the mounting position of the articulated arm transport system is arbitrary, d. H. the pivoting movement can take place both above and below the transport plane.
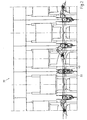
- 1 presses 2 and 3 are shown in FIG. 1 by a press line.
- Press rams 4 and 5 carry upper tools 6 and 7.
- Lower tools 8 and 9 are located on sliding tables 10 and 11.
- Between the presses are Orientierstationen 12 and 13 arranged.
- the articulated arm transport systems 18 - 21 are the articulated arm transport systems 18 - 21 according to the invention in different functional positions.
- Vertical guide rails 22 are attached to the press stands 14-17, carriages 23 with guides 24 carry the articulated arms 43, 44.
- the drive motor for Armverschwenkung is designated 25.
- the stationary lifting motor 26 for the vertical movement is via a gear 27, in operative connection with a rack 28. More constructional details are described in the following figures.
- the task of the articulated arm transport system 18 - 21 is to transport parts in cycles in the transport direction 29 by successively arranged processing and orientation stations. The different movements are not chronological but exemplified.
- the articulated arm transport systems are arranged at the press stands in pairs and in mirror image opposite each other.
- Receiving elements for the parts holding means 31 supporting cross-beam 30 are designed so that an automatic replacement is possible in a tool change.
- the proposed lowered park position favors an early retraction into the tool room.
- FIG. 2 shows the arrangement of an articulated-arm transport system in a large-scale transfer press 39. Shown are, for example, forming stages in different movement sequences. To reduce the press length was waived on clipboards or Orientierstationen. If a change in position of the part is required, this is performed directly by the articulated arm transport system. For this purpose, a drive 40 is connected via drive elements with the cross-beam 30. The functional sequences are comparable to those already described under FIG.
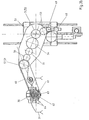
- Figure 3a and 3b show an articulated arm enlarged in the front view.
- the illustration has been chosen so that in Figure 3a, the drive chain for the pivot arm and in Figure 3b, the drive for the pivoting of the crossbar 30 can be explained.
- Figure 4 for understanding the function.
- the gear 46 engages and in this the gear 47 a.
- the gear 47 is fixedly connected to the second Schwenkarmteil 44. If the pivoting movement of the first Schwenkarmteils 43 introduced by the drive motor 25 via gears 41, 42, this generates a rolling rotational movement of the gears 46, 47 and the fixed connection with gear 47, the corresponding pivoting of the second Schwenkarmteils 44 about the axis of rotation 70th
- the size of the pivoting movement or the pivot angle 48 is infinitely variable via the drive 25, the z. B. is designed as a controlled servo motor. It can be clearly seen that the larger the pivoting angle 48 is chosen, the more the articulated arm system 43, 44 approaches the horizontal extended position and the smaller the required clearance for inserting or discharging the parts. A distortion-free horizontal movement is achieved when based on the rotational or bearing axes 69, 70, 62, the two Schwenkarmmaschine 43, 44 are executed in the same length.
- the pivot drive 40 mounted on the carriage 23 drives the gear 49. Via intermediate wheel 50, the rotational movement is transmitted to gear 51. Via a common shaft 52 gear 51 is connected to gear 53. Gear 53 drives the mounted in the first Schwenkarmteil 43 gear chain 54 - 57 at. Gear 57 is fixedly connected via a hollow shaft 58 with toothed belt pulley 59 and drives this. Timing belt pulley 59 drives toothed belt pulley 61 via toothed belt 60.
- Timing belt pulley 61 forms a unit with the receiving and bearing unit of the cross-beam 30 and causes a pivoting movement about the pivot axis 62. Since the pivot drive 40 may be a controlled servomotor, a defined change in position of the parts is guaranteed.
- the receiving and supporting unit for the cross-beam 30 is exemplified as a universal joint 63, whereby a horizontal and vertical inclination of the cross-beam 30 is made possible.
- Elements for automatically changing the cross-beam 30 in a tool change are provided and designated 64.
- FIGS. 3a and 3b The drive chains described in FIGS. 3a and 3b can be seen together from the sectional representation of FIG. In addition to other structural details, in particular, the required for pivoting from the first Schwenkarmteil 43 fixed connection of gear 45, with carriage 23 and also the fixed connection of gear 47 with the second Schwenkarmteil 44 can be seen. Since the opening angle between the Schwenkarm surely 43, 44 is twice as large as the pivot angle 48, and the gear ratio of gear 45 to gear 47 is corresponding to 2: 1.
- the darker hatched drive chain in FIG. 4 serves to pivot the crosspiece 30 about the pivot axis 62.
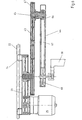
- FIGS 5 and 6 An embodiment without pivoting the cross-beam 30 is shown in FIGS 5 and 6.
- the functional description of the vertical lifting movement and the gear assembly in the carriage 23 and the first pivot arm 43 can be found in the previous figures.
- the connection of the first Schwenkarmteil 43 with the second Schwenkarmteil 44 via gear 47 and the movable mounting of the arms is identical to the previously described embodiment.
- New is the fixed connection of the toothed belt pulley 66 with the first Schwenkarmteil 43.
- the toothed belt drives 66, 67, 68 are now used to stabilize and positionally correct support the crossbar 30.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Press Drives And Press Lines (AREA)
- Specific Conveyance Elements (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Feeding Of Workpieces (AREA)
- Automatic Assembly (AREA)
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10042991 | 2000-09-01 | ||
| DE10042991A DE10042991A1 (de) | 2000-09-01 | 2000-09-01 | Gelenkarm-Transportsystem |
| PCT/DE2001/003083 WO2002018073A2 (de) | 2000-09-01 | 2001-08-10 | Gelenkarm-transportsystem |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1313575A2 EP1313575A2 (de) | 2003-05-28 |
| EP1313575B1 true EP1313575B1 (de) | 2005-09-21 |
Family
ID=7654554
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP01964901A Expired - Lifetime EP1313575B1 (de) | 2000-09-01 | 2001-08-10 | Gelenkarm-transportsystem |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US6712198B2 (es) |
| EP (1) | EP1313575B1 (es) |
| AT (1) | ATE304906T1 (es) |
| BR (1) | BR0107159A (es) |
| CA (1) | CA2389291C (es) |
| DE (2) | DE10042991A1 (es) |
| ES (1) | ES2249469T3 (es) |
| MX (1) | MXPA02004312A (es) |
| WO (1) | WO2002018073A2 (es) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110180932A (zh) * | 2019-06-04 | 2019-08-30 | 张小赛 | 冲压机及用于该冲压机的机器人 |
| DE102020112613B3 (de) | 2020-05-11 | 2021-08-19 | Aida Europe Gmbh | Transfersystem für Pressen und Pressenanordnung |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3895538B2 (ja) * | 2000-11-24 | 2007-03-22 | 本田技研工業株式会社 | 縁曲げ加工装置 |
| DE10140182A1 (de) * | 2001-08-22 | 2003-04-10 | Volkswagen Ag | Zufuhreinrichtung für eine Presse |
| JP3865703B2 (ja) * | 2002-10-25 | 2007-01-10 | ファナック株式会社 | 物品搬送システム及び搬送方法 |
| DE10328447B4 (de) * | 2003-06-25 | 2006-06-08 | Schuler Pressen Gmbh & Co. Kg | Transferpresse mit verbesserter Raumausnutzung |
| DE10351670A1 (de) * | 2003-11-05 | 2005-06-30 | Kuka Roboter Gmbh | Verfahren und Vorrichtung zum Steuern von Robotern |
| DE10352982B4 (de) * | 2003-11-13 | 2007-06-21 | Müller Weingarten AG | Gelenkarmtransportvorrichtung |
| DE102004013825B4 (de) * | 2003-11-13 | 2011-01-20 | Müller Weingarten AG | Gelenkarmtransportvorrichtung |
| JP4483306B2 (ja) * | 2004-01-16 | 2010-06-16 | トヨタ自動車株式会社 | タンデムプレス装置 |
| US7316149B2 (en) * | 2004-01-30 | 2008-01-08 | Komatsu Ltd. | Inter-pressing-machine work transfer device |
| DE102004004899B4 (de) * | 2004-01-30 | 2009-04-30 | Müller Weingarten AG | Tandem-Transfervorrichtung zum Transportieren von Werkstücken in einer Pressenstraße |
| DE102004018059B4 (de) * | 2004-04-08 | 2008-01-24 | Schuler Pressen Gmbh & Co. Kg | Transfereinrichtung und Transferverfahren |
| WO2006032254A1 (de) * | 2004-09-22 | 2006-03-30 | Müller Weingarten AG | Transportvorrichtung |
| US20080145195A1 (en) * | 2004-10-26 | 2008-06-19 | Gudel Group Ag | Transfer System for Transporting Work Pieces in a Press |
| DE102006003522A1 (de) * | 2006-01-24 | 2007-08-02 | Müller Weingarten AG | Transfersystem mit Wendevorrichtung |
| DE102006021876B4 (de) * | 2006-05-11 | 2018-05-30 | Ford Global Technologies, Llc | Bördelvorrichtung |
| JP2009119580A (ja) * | 2007-11-16 | 2009-06-04 | Aida Eng Ltd | 搬送装置および大型搬送装置 |
| CN101745908B (zh) * | 2008-12-18 | 2013-01-16 | 珠海格力电器股份有限公司 | 一种机械手及使用该机械手的钣材冲压加工设备 |
| DE202009015682U1 (de) * | 2009-12-01 | 2011-04-14 | Kuka Systems Gmbh | Transporteinrichtung |
| US20110248738A1 (en) * | 2010-04-12 | 2011-10-13 | Sze Chak Tong | Testing apparatus for electronic devices |
| IT1402328B1 (it) * | 2010-10-15 | 2013-08-30 | I P S S R L Internat Project Services | "dispositivo di formazione di pacchi di sacchi in plastica" |
| EP2444174B1 (de) * | 2010-10-22 | 2013-11-27 | TRUMPF Corporation | Maschinelle Anordnung zum Bearbeiten von Werkstücken, insbesondere von Blechen, sowie Verfahren zum Entladen von Werkstücken an einer derartigen maschinellen Anordnung |
| CN103619547A (zh) * | 2011-03-30 | 2014-03-05 | 斯寇司株式会社 | 斯科特拉塞尔机构式装置 |
| CN102632123B (zh) * | 2012-03-29 | 2015-06-03 | 浙江凌宇机械制造有限公司 | 一种刹车盘自动生产线 |
| KR101212195B1 (ko) * | 2012-07-19 | 2012-12-13 | 미원정밀공업(주) | 탠덤 프레스 라인용 더블 로봇라인을 이용한 프레스 성형품 자동 제조시스템 |
| CN104802022B (zh) * | 2014-01-23 | 2017-02-08 | 温州神一微型轴有限公司 | 一种轴料平头机自动上下料装置 |
| DE102014102522B3 (de) * | 2014-02-26 | 2015-07-09 | Schuler Pressen Gmbh | Transport- und Orientierungssystem zum Transportieren und Orientieren von Werkstücken |
| CN106180453A (zh) * | 2015-04-29 | 2016-12-07 | 长城汽车股份有限公司 | 物料传递机械手和板件冲压生产线 |
| EP3619762A1 (fr) * | 2017-05-03 | 2020-03-11 | Commissariat à l'Énergie Atomique et aux Énergies Alternatives | Installation d'assemblage de membranes pour pile a combustible |
| CN109590406A (zh) * | 2018-12-17 | 2019-04-09 | 保定市屹马汽车配件制造有限公司 | 一种座盆冲压件生产自动化工作站 |
| JP7411665B2 (ja) | 2019-01-18 | 2024-01-11 | ノーグレン オートメーション ソリューションズ,リミティド ライアビリティ カンパニー | 自動交換ツーリングシステムのための方法及び装置 |
| US11760573B2 (en) * | 2021-02-03 | 2023-09-19 | Everseen Limited | Bidirectional unilinear multi-carrier repository interface system |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4056198A (en) * | 1976-03-29 | 1977-11-01 | Danly Machine Corporation | Transfer and turnover mechanism for use with power press or the like |
| JPS54159964A (en) * | 1978-06-06 | 1979-12-18 | Shiroyama Kogyo Kk | Articulated arm type manipulator |
| JPS5656395A (en) * | 1979-10-12 | 1981-05-18 | Hitachi Ltd | Industrial multiple joint type robot |
| JPS5727686A (en) * | 1980-07-21 | 1982-02-15 | Hitachi Ltd | Industrial articular robot |
| US4548544A (en) * | 1982-12-30 | 1985-10-22 | Prince Corporation | Robot apparatus particularly adapted for removing and handling die cast parts |
| US5222409A (en) * | 1991-09-25 | 1993-06-29 | Dalakian Sergei V | Industrial robot arms |
| US5423648A (en) | 1992-01-21 | 1995-06-13 | Fanuc Robotics North America, Inc. | Method and system for quickly and efficiently transferring a workpiece from a first station to a second station |
| DE4408449A1 (de) | 1994-03-12 | 1995-09-14 | Mueller Weingarten Maschf | Transportsystem |
| US5842370A (en) * | 1996-12-19 | 1998-12-01 | Schuler Pressen Gmbh & Co. | Transfer device and multistation presses |
| CA2361920C (en) * | 1999-03-17 | 2005-12-06 | Muller Weingarten Ag | Transport system |
-
2000
- 2000-09-01 DE DE10042991A patent/DE10042991A1/de not_active Withdrawn
-
2001
- 2001-08-10 CA CA002389291A patent/CA2389291C/en not_active Expired - Fee Related
- 2001-08-10 AT AT01964901T patent/ATE304906T1/de not_active IP Right Cessation
- 2001-08-10 WO PCT/DE2001/003083 patent/WO2002018073A2/de active IP Right Grant
- 2001-08-10 MX MXPA02004312A patent/MXPA02004312A/es active IP Right Grant
- 2001-08-10 BR BR0107159-9A patent/BR0107159A/pt not_active IP Right Cessation
- 2001-08-10 ES ES01964901T patent/ES2249469T3/es not_active Expired - Lifetime
- 2001-08-10 DE DE50107515T patent/DE50107515D1/de not_active Expired - Lifetime
- 2001-08-10 US US10/129,011 patent/US6712198B2/en not_active Expired - Fee Related
- 2001-08-10 EP EP01964901A patent/EP1313575B1/de not_active Expired - Lifetime
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110180932A (zh) * | 2019-06-04 | 2019-08-30 | 张小赛 | 冲压机及用于该冲压机的机器人 |
| CN110180932B (zh) * | 2019-06-04 | 2020-10-30 | 常州市思企智能科技有限公司 | 一种配合冲压机使用的机器人 |
| DE102020112613B3 (de) | 2020-05-11 | 2021-08-19 | Aida Europe Gmbh | Transfersystem für Pressen und Pressenanordnung |
| WO2021228326A1 (de) | 2020-05-11 | 2021-11-18 | Aida Europe Gmbh | Transfersystem für pressen und pressenanordnung |
| US11826813B2 (en) | 2020-05-11 | 2023-11-28 | Aida Europe Gmbh | Transfer system for presses and press assembly |
Also Published As
| Publication number | Publication date |
|---|---|
| DE50107515D1 (de) | 2006-02-02 |
| ES2249469T3 (es) | 2006-04-01 |
| US20020192058A1 (en) | 2002-12-19 |
| CA2389291C (en) | 2008-01-08 |
| WO2002018073A2 (de) | 2002-03-07 |
| WO2002018073A3 (de) | 2002-07-18 |
| MXPA02004312A (es) | 2003-09-22 |
| DE10042991A1 (de) | 2002-03-21 |
| CA2389291A1 (en) | 2002-03-07 |
| EP1313575A2 (de) | 2003-05-28 |
| BR0107159A (pt) | 2002-06-18 |
| US6712198B2 (en) | 2004-03-30 |
| ATE304906T1 (de) | 2005-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1313575B1 (de) | Gelenkarm-transportsystem | |
| EP0672480B1 (de) | Transportsystem | |
| EP1161317B1 (de) | Transportsystem | |
| EP0850709B1 (de) | Transfereinrichtung und Mehrstationenpresse | |
| EP0671228B1 (de) | Transporteinrichtung für Werkstücke in einer Presse | |
| WO2005075123A1 (de) | Transportvorrichtung für werkstücke durch pressenanlagen | |
| EP0693334A1 (de) | Transportsystem | |
| EP2776184B1 (de) | Antriebseinrichtung für einen mehrachsigen transport von werkstücken durch aufeinander folgende bearbeitungsstationen einer bearbeitungsmaschine | |
| DE19628556A1 (de) | Vorrichtung zur Entnahme und Zuführung von Formteilen | |
| WO2006045283A1 (de) | Vorrichtung zum transport und zur lageveränderung von werkstücken | |
| EP1682289B1 (de) | Gelenkarmtransportvorrichtung | |
| EP0850710A1 (de) | Flexibler Mehrachstransfer | |
| EP0621093B1 (de) | Pressenstrasse oder Grossteil-Stufenpresse mit einer Transporteinrichtung zum Transportieren von Werkstücken | |
| EP1000681B1 (de) | Transfereinrichtung mit kombiniertem Antrieb | |
| EP2283981B1 (de) | Handhabungseinrichtung zum Bewegen von Gütern | |
| EP1123761B1 (de) | Horizontales Transportsystem | |
| EP1000680B1 (de) | Modulare Transfereinrichtung mit Schwenk- und Linearantrieben | |
| EP0507098A1 (de) | Transporteinrichtung zum Transportieren von grossflächigen Teilen in einer Stufenpresse | |
| EP0502233B1 (de) | Transportautomat, insbesondere zum Transportieren von Werkstücken zwischen Pressen | |
| EP0847818B1 (de) | Transferpresse | |
| DE19645793A1 (de) | Transfereinrichtung zum Transport von Werkstücken durch eine Stufenpresse, Transferpressenlinie o. dgl. Pressenanlage | |
| DE102004013825A1 (de) | Gelenkarmtransportvorrichtung | |
| EP0782900A1 (de) | Werkzeugmaschine | |
| WO2000058059A1 (de) | Automatisierungsarm |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20020418 |
|
| AK | Designated contracting states |
Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE TR |
|
| 17Q | First examination report despatched |
Effective date: 20040921 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: MUELLER WEINGARTEN AG |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE TR |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20050921 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20050921 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20050921 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20050921 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REF | Corresponds to: |
Ref document number: 50107515 Country of ref document: DE Date of ref document: 20051027 Kind code of ref document: P |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20051221 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20051221 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: AMMANN PATENTANWAELTE AG BERN |
|
| REF | Corresponds to: |
Ref document number: 50107515 Country of ref document: DE Date of ref document: 20060202 Kind code of ref document: P |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060221 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2249469 Country of ref document: ES Kind code of ref document: T3 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20060622 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060810 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060810 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20050921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20050921 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20100901 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20100823 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20100823 Year of fee payment: 10 |
|
| BERE | Be: lapsed |
Owner name: *MULLER WEINGARTEN A.G. Effective date: 20110831 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20110810 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20120430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110831 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110810 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20130822 Year of fee payment: 13 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140811 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20160802 Year of fee payment: 16 Ref country code: IT Payment date: 20160823 Year of fee payment: 16 Ref country code: CH Payment date: 20160824 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20160829 Year of fee payment: 16 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 50107515 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180301 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170810 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20181025 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170811 |