EP0406532B1 - Verfahren zum Anwerfen einer Webmaschine - Google Patents
Verfahren zum Anwerfen einer Webmaschine Download PDFInfo
- Publication number
- EP0406532B1 EP0406532B1 EP90107483A EP90107483A EP0406532B1 EP 0406532 B1 EP0406532 B1 EP 0406532B1 EP 90107483 A EP90107483 A EP 90107483A EP 90107483 A EP90107483 A EP 90107483A EP 0406532 B1 EP0406532 B1 EP 0406532B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- machine
- parameters
- standstill
- rotational speed
- starting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images


Classifications
-
- D—TEXTILES; PAPER
- D03—WEAVING
- D03D—WOVEN FABRICS; METHODS OF WEAVING; LOOMS
- D03D51/00—Driving, starting, or stopping arrangements; Automatic stop motions
- D03D51/002—Avoiding starting marks
-
- D—TEXTILES; PAPER
- D03—WEAVING
- D03D—WOVEN FABRICS; METHODS OF WEAVING; LOOMS
- D03D51/00—Driving, starting, or stopping arrangements; Automatic stop motions
- D03D51/007—Loom optimisation
Definitions
- the invention relates to a method for starting looms equipped with an electromotive main drive, in which the starting energy is applied essentially by electrically drivable flywheel masses which can be coupled to the weaving machine, the flywheel masses having an opposite to that for which the clutch is to be initiated by a switching command the operation of the weaving machine, the nominal rotational speed is increased and the flywheel masses are separated from the electromotive drive for a transition phase after engaging the clutch, the electromotive drive being temporarily released by the switching command that controls the engagement and then the regular supply of the electromotive drive with a delay when The momentary rotational speed of the flywheel masses falls into the range of the nominal rotational speed of the weaving machine.
- Such a method is the subject of the applicant's earlier patent application DE-A-37 33 590.1-26.
- the machine is started up after the shutdown via an adjustable time delay.
- the present invention is therefore based on the object of developing a method for controlling the starting of a weaving machine with the features mentioned at the outset in such a way that the errors in the weaving goods which occur in the prior art during downtimes are avoided.
- the invention is characterized in that the machine control determines the downtime, the cause of the downtime and the type of at the time of Standstill in the machine processed binding that these parameters are forwarded to a processor (microprocessor), which processes the parameter data and, in accordance with the result of the processing from a library for starting up the machine, selects a program associated with the result that the startup of the Machine controls.
- a processor microprocessor
- the invention is therefore based on the new and surprising finding that the parameters specified above are sufficient and necessary to determine the correct downtime of the machine and to regulate the run-up of the machine.
- the method according to the invention thus gives excellent weaving quality, regardless of the particular downtime of the weaving machine.
- the parameters mentioned are fed to the microprocessor arranged outside the weaving machine, which in turn has an input via which the type of article which is used in the WM is processed, the WM type with its machine parameters, the yarn parameters, the regulator type and the type of binding are entered.
- this microprocessor cooperates in data exchange with a read-only memory library.
- This library stores the parameters which are used for input into the microprocessor and which the microprocessor needs to regulate the start-up of the machine.
- a shutdown weaving machine therefore outputs the four parameters mentioned above to the microprocessor and the microprocessor searches from its program library for the optimal startup program provided for the startup.
- This run-up program is therefore varied depending on the length of the downtime, depending on the cause of the downtime (weft break or warp break) and, moreover, on the type of binding which was just being processed at the time of the downtime.
- the microprocessor fetches the parameters required for the startup program and then searches for the startup program responsible.
- the run-up program now selected by the microprocessor now influences the goods take-off regulator, the warp regulator and, moreover, the run-up of the machine in such a way that the machine is to reach a certain predetermined selection speed (overspeed) regardless of the machine-typical parameters.
- the machine-typical parameters which, as mentioned above, naturally also include the parameters typical of the environment, such as, for. B. Temperature and humidity in the area of the warp threads or in the area of the shed.
- a further development of the present invention therefore provides for regulation of the run-up speed, i.e. the actual speed of the weaving machine is constantly measured, the microprocessor according to the invention is entered taking into account the variables entered, and the microprocessor then searches for the optimum selection speed required for the variables and reaches this selection speed with the aid of the control according to the invention within a very short time.
- the weaving machine works with an internal one in a manner known per se Control together.
- the present invention i.e.
- the present control device serves to interact with all types of weaving machines.
- weaving machines work together with the regulation according to the invention.
- a number of parameters are fed to a microprocessor 4 via the bus line 3. These parameters are, the length of the downtime of the weaving machine, the cause of the standstill (weft break, warp break or hand stop or power failure).
- the weaving machine also determines what type of weave was being processed at the time of the standstill.
- the microprocessor 4 also has an input via a further bus line 5 which is designed as a manual input.
- the ambient parameters in the area of the warp threads or in the area of the shed can be detected by hand input or automatically as temperature and air humidity.
- the microprocessor processes these inputs from bus lines 3 and 5 and sends a corresponding signal via bus lines 6 to a program library 8.
- control programs are fed via the bus line 7 to the microprocessor 4, which in turn acts via the bus line 9 of the controller 2 of the weaving machine 1 and now executes and executes the corresponding startup program.
- the overspeed (select speed) of 420 rpm should be reached after a run-up time of about 5 seconds (point 16).
- a selection speed of 420 rpm is not always ideal in order to avoid the errors mentioned at the beginning, but the selection speed also depends on the type of standstill, namely whether a shot break was the cause of the standstill or a warp break or whether a high warp or a low warp was just taking place at the time of the standstill.
- the choice of the selected speed is not predetermined and rigid, but also depends more on the operating temperature, the oil temperature and the like. Parameters.
- FIGS. 3 and 4 are used to explain these various types of parameters which influence the selection speed during startup.
- Figure 3 shows that depending on the downtime, i.e. depending on the time after which the machine starts up again after a standstill, the selection speed must also be set depending on this.
- Figure 3 shows that, moreover, this selected speed depends not only on the length of the downtime, but also on the type of article that is woven with the machine.
- FIG. 3 shows an article 1 with a curve 19, which results in points 20, 21, 22 during various downtimes.
- a completely different ideal rotational speed results depending on the downtime in curve 17 or curve 18.
- the selection speed depends not only on the above-mentioned parameters according to FIG. 2, but also on the duration of the downtime and on the type of article processed.
- Figure 2 shows that you should change the speed in the direction of arrow 15, the direction of arrow 15 also the cause of the Standstill includes, namely the question of whether a weft break or a chain break occurred or other causes for the stoppage.
- FIG. 2 shows that there are various ideal curves 10, 11, 12, depending on the oil temperature, the chain lifting path, the type of binding and the number of shafts the machine has.
- the regulation according to the invention is provided.
- FIG. 4 also shows that the curves 23, 24, 25 have a completely different shape than the curves 17, 18, 19 of FIG. 3 if another cause for the standstill has been determined, such as, for example, B. a shot break or a different type of binding compared to the curves of Figure 3.
- the weaving machine according to the present invention thus receives artificial intelligence with regard to the startup program of this weaving machine.
- These different types of parameters can only be mastered by determining the downtime, without the tissue defects described at the beginning occurring.
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Looms (AREA)
Description
- Die Erfindung betrifft ein Verfahren zum Anwerfen von mit einem elektromotorischen Hauptantrieb ausgerüsteten Webmaschinen, bei denen die Anwerfenergie im wesentlichen von elektrisch antreibbaren, an die Webmaschine kuppelbaren Schwungmassen aufgebracht wird, wobei vor dem durch einen Schaltbefehl einzuleitenden Einrücken der Kupplung die Schwungmassen mit einer gegenüber der für den Betrieb der Webmaschine vorgesehenen Nenndrehgeschwindigkeit erhöhten Drehgeschwindigkeit umlaufen und nach dem Einrücken der Kupplung für eine Übergangsphase die Schwungmassen vom elektromotorischen Antrieb getrennt sind, wobei durch den das Einkuppeln steuernden Schaltbefehl der elektromotorische Antrieb vorübergehend freigeschaltet wird und anschließend die reguläre Speisung des elektromotorischen Antriebs mit Verzögerung beim Absinken der momentanen Drehgeschwindigkeit der Schwungmassen in den Bereich der Nenndrehgeschwindigkeit der Webmaschine erfolgt.
- Ein derartiges Verfahren ist Gegenstand der älteren Patentanmeldung DE-A-37 33 590.1-26 der Anmelderin.
Bei einem dort beschriebenen Ausführungsbeispiel erfolgt das Hochfahren der Maschine nach dem Stillsetzen über eine einstellbare Zeitverzögerung. - Bei modernen Hochleistungs-Webmaschinen kommt es aufgrund der hohen Drehzahlen vor, daß bei besonders feinen Waren Anlaufstellen sowie Stand- und Kriechstellen sich zeitabhängig verschieden verhalten. Dies führt in der Praxis dazu, daß eine Webmaschine, die beispielsweise auf eine Abstellung von 2 Minuten eingestellt ist, mit einem längeren oder kürzeren Stillstand bei Start artikelbedingt einen Fehler verursachen kann. Dies wird dadurch hervorgerufen, daß durch neue Spinnverfahren, beispielsweise Openendgarne, Actetat- und Viskose-Garne, immer mehr Garne verarbeitet werden, die eine geringere Elastizität besitzen. Die verminderte Elastizität führt dazu, daß das Kriechen des Garnes, d.h. dort, wo die Elastizitätsgrenze überschritten wird und eine bleibende Verformung des Garnes eintritt, immer häufiger vorkommt. Die Stillstandszeit der Webmaschine nimmt daher einen immer wichtigeren Stellenwert ein. Aufgrund der Bedienungsgröße und der Wegezeiten des Bedienungspersonals sind Stillstände der Webmaschine von 1 bis 30 Minuten durchaus realistisch.
- Beim vorstehend beschriebenen Stand der Technik, bei der man also mit einer vorher festgelegten Stillstandszeit arbeitet, um anschließend auf die Überdrehzahl, im folgenden auch Wahldrehzahl genannt, überzugehen, besteht aber der Nachteil, daß diese fest eingestellte Hochlaufzeit häufig nicht ausreicht, um die gewünschte Wahldrehzahl in dieser vorgesehenen Zeit zu erreichen. Dies hängt beispielsweise ab von der Öltemperatur, der Kettspannung, von der Bindungsart, der Schäftezahl, der Betriebstemperatur und von anderen Parametern, so daß also die erforderliche und geforderte Wahldrehzahl nicht immer zu der fest eingestellten Zeit erreicht werden konnte.
- Der vorliegenden Erfindung liegt somit die Aufgabe zugrunde, ein Verfahren zur Regelung des Anwerfens einer Webmaschine mit den eingangs genannten Merkmalen so weiterzubilden, daß die beim Stand der Technik bei den Stillstandszeiten auftretenden Fehler in der Webware vermieden werden.
- Zur Lösung dieser Aufgabe ist die Erfindung dadurch gekennzeichnet, daß von der Maschinensteuerung die Stillstandszeit ermittelt wird, die Ursache des Stillstandes sowie die Art der zum Zeitpunkt des Stillstandes in der Maschine verarbeiteten Bindung, dass diese Parameter an einen Prozessor (Mikroprozessor) weitergeleitet werden, der die Parameterdaten verarbeitet und entsprechend dem Ergebnis der Verarbeitung aus einer Bibliothek zum Hochlauf der Maschine ein dem Ergebnis zugeordnetes Programm auswählt, daß über die Maschinensteuerung das Hochlaufen der Maschine steuert.
- Der Erfindung liegt also die neue und überraschende Erkenntnis zugrunde, daß gerade die vorstehend angegebenen Parameter ausreichend und auch notwendig sind, um die jeweils richtige Stillstandszeit der Maschine zu ermitteln und das Hochlaufen der Maschine zu regeln. Nach dem erfindungsgemässen Verfahren erhält man somit eine ausgezeichnete Webqualität, und zwar unabhängig von der jeweiligen Stillstandszeit der Webmaschine.
- Es hat sich nämlich herausgestellt, daß die Dauer der Stillstandszeit entscheidend die Gewebequalität beeinflusst. Nachdem die Stillstandszeit in einem Bereich zwischen etwa 1 Minute und 30 Minuten variieren, kann, kommt es bei bestimmten Garnen, z.B. open-end-gesponnenen Garnen zu einer bleibenden Veränderung der Elastizität dieser Garne beim Verfahren nach dem Stand der Technik. D.h., daß es zu plastischen Veränderungen dieser Garne kam, die dann beim Weiterweben einen Gewebefehler verursachten. Derartige Gewebefehler können mit dem erfindungsgemässen-Verfahren verhindert werden, weil man in Abhängigkeit von der Stillstandszeit die Hochlaufeigenschaften der Maschine beeinflussen kann, ggf. auch die Schaltung des Regulators der Maschine (Kett- und Schußregulator).
- Die erwähnten Parameter werden erfindungsgemäss dem außerhalb der Webmaschine angeordneten Mikroprozessor zugeführt, der seinerseits eine Eingabe aufweist, über welche die Art des Artikels, welcher in der WM verarbeitet wird, der WM-Typ mit seinen maschinentechnischen Parametern, die Garnparameter, der Regulator-Typ und die Bindungsart eingegeben werden.
- Erfindungsgemäß arbeitet dieser Mikroprozessor im Datenaustausch mit einer Festspeicher-Bibliothek zusammen. In dieser Bibliothek sind die Parameter gespeichert, welche zur Eingabe in den Mikroprozessor verwendet werden und die der Mikroprozessor braucht, um den Hochlauf der Maschine zu regulieren.
- Eine stillgesetzte Webmaschine gibt also die oben genannten vier Parameter an den Mikroprozessor ab und der Mikroprozessor sucht aus seiner Programm-Bibliothek das zum Hochlauf hierfür vorgesehene optimale Hochlaufprogramm.
- Dieses Hochlaufprogramm wird also variiert in Abhängigkeit von der Länge der Stillstandszeit, in Abhängigkeit von der Ursache des Stillstandes (Schußbruch oder Kettbruch) und im übrigen von der Art der Bindung welche zum Zeitpunkt des Stillstandes gerade verarbeitet wurde.
- Aufgrund der vorhandenen Programm-Bibliothek holt sich der Mikroprozessor die für das Hochlaufprogramm erforderlichen Parameter und sucht das dann zuständige Hochlaufprogramm aus.
- Das jetzt vom Mikroprozessor ausgewählte Hochlaufprogramm beeinfluß nun den Warenabzugsregulator, den Kettregulator und im übrigen den Hochlauf der Maschine nämlich derart, daß die Maschine unabhängig von den maschinentypischen Parametern eine bestimmte vorgegebene Wahldrehzahl (Überdrehzahl) erreichen soll. Zu den maschinentypischen Parametern, die wie vorhin erwähnt, gehören selbstverständlich auch die umgebungstypischen Parameter, wie z. B. Temperatur und Luftfeuchtigkeit im Bereich der Kettfäden bzw. im Bereich des Webfaches.
- Alle diese Variablen werden durch die erfindungsgemäße Regelung mit dem erfindungsgemäßen Mikroprozessor erfaßt, und in Abhängigkeit davon wird das Hochlaufprogramm ausgewählt und die von den Parametern abhängige Wahldrehzahl ermittelt und mit Hilfe einer erfindungsgemäßen Regelung schnellstmöglichst erreicht.
- Eine Weiterbildung der vorliegenden Erfindung sieht also eine Regelung der Hochlauf-Drehzahl vor, d.h. es wird die Ist-Drehzahl der Webmaschine ständig gemessen, dem erfindunggemäßen Mikroprozessor unter Berücksichtigung der eingegebenen Variablen eingegeben, und der Mikroprozessor sucht dann die für die Variablen geforderte optimale Wahldrehzahl aus und erreicht diese Wahldrehzahl mit Hilfe der erfindungsgemäßen Regelung innerhalb kürzester Zeit.
- Die Erfindung wird nun anhand eines Beispieles näher erläutert.
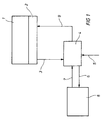
- Figur 1 zeigt schematisiert ein Blockschaltbild nach der Erfindung;
- Figur 2 zeigt ein Diagramm Drehzahl/Hochlaufzeit;
- Figur 3 zeigt das Diagramm Wahldrehzeit/Stillstandszeit;
- Figur 4 zeigt das Diagramm Wahldrehzahl/Stillstandszeit
- Die Webmaschine arbeitet in an sich bekannter Weise mit einer internen Steuerung zusammen.
- Die vorliegende Erfindung, d.h. die vorliegende Regeleinrichtung, dient zum Zusammenwirken mit allen Arten von Webmaschinen.
- Diese beliebigen Arten von Webmaschinen arbeiten mit der erfindungsgemäßen Regelung zusammen. Über die Busleitung 3 werden eine Anzahl von Parametern einem Mikroprozessor 4 zugeführt. Diese Parameter sind, die Dauer der Stillstandszeit der Webmaschine, die Ursache des Stillstandes (Schußbruch, Kettbruch oder Handstop oder Stromausfall). Ferner wird in der Webmaschine ermittelt, welche Art von Bindung gerade zum Zeitpunkt des Stillstandes verarbeitet wurde.
- Diese Parameter werden also über die Busleitung 3 einem Mikroprozessor 4 zugeführt.
- Der Mikroprozessor 4 hat ferner über eine weitere Busleitung 5 eine Eingabe, die als Handeingabe ausgebildet ist. Über dieses Terminal werden z. B. die Art des Artikels, welche in der Webmaschine verarbeitet wird, eingegeben, die webmaschinentechnischen Parameter, die Garnparameter, die Bindungsart. Ferner kann über Handeingabe oder auch automatisch die Umgebungsparameter im Bereich der Kettfäden bzw. im Bereich des Webfaches erfaßt werden als Temperatur und Luftfeuchtigkeit.
- Der Mikroprozessor verarbeitet diese Eingaben von den Busleitungen 3 und 5 und gibt ein entsprechendes Signal über die Busleitungen 6 auf eine Programm-Bibliothek 8.
- In der Programm-Bibliothek sind feste Parameter gespeichert, nämlich Regelungsprogramme, welche den kompletten Hochlauf der Webmaschine nach Beendigung des Stillstandes vollziehen. Darüber hinaus werden noch die anderen webmaschinentechnischen Komponenten angesteuert, wie z. B. der Warenabzugsregulator, der Kettregulator und dgl. mehr.
- Diese Regelungsprogramme werden über die Busleitung 7 dem Mikroprozessor 4 zugeführt, der seinerseits über die Busleitung 9 der Steuerung 2 der Webmaschine 1 wirkt und das entsprechende Hochlaufprogramm nun ausführt und vollzieht.
- Anhand der Figur 2 soll dies schematisiert dargestellt werden.
- In der Ordinaate ist festgelegt, daß in Punkt 14 eine bestimmte Produktionsdrehzahl und Leerlaufdrehzahl von z. B. 400 Upm vorgegeben ist und eingehalten werden soll.
- Läuft nun die Maschine nach einem Stillstand hoch, dann wird hierfür eine bestimmte Hochlauf-Zeit verwendet, die auf der Abzisse aufgetragen ist.
- Als Beispiel sei hier angegeben, daß im Idealfall nach einer Hochlauf-Zeit von etwa 5 sec (Punkt 16) die Überdrehzahl (Wahldrehzahl) von 420 Upm erreicht werden soll.
- Jetzt hat sich herausgestellt, daß diese Hochlauf-Zeit von 5 sec bis zur Erreichung einer bestimmten Wahldrehzahl von 420 Upm nicht immer erreichbar ist und durch zuviele Faktoren beeinflußt wird, wie z. B. Öltemperatur oder Betriebstemperatur, der Ketthebungsweg, die Bindungsart, die Schäftezahl, Schaltzeitstreuungen im Schütz und dgl. mehr.
- Im übrigen hat sich herausgestellt, daß nicht immer eine Wahldrehzahl von 420 Upm ideal ist, um die eingangs genannten Fehler zu vermeiden, sondern die Wahldrehzahl hängt auch ab von der Art des Stillstandes, nämlich ob ein Schußbruch die Ursache für den Stillstand war oder ein Kettbruch oder ob zum Zeitpunkt des Stillstandes eine hohe Ketthebung oder eine niedrige Ketthebung gerade stattfand.
- Im übrigen ist die Wahl der Wahldrehzahl nicht vorgegeben und starr, sondern sie hängt überdies noch von der Betriebstemperatur, der Öltemperatur und dgl. Parametern mehr ab.
- Zur Erläuterung dieser verschiedenstartigen Parameter, welche die Wahldrehzahl beim Hochlauf beeinflussen, wird auf die Figuren 3 und 4 Bezug genommen. Die Figur 3 zeigt nämlich, daß in Abhängigkeit von der Stillstandszeit, d.h. in Abhängigkeit von der Zeit, nach der die Maschine nach einem Stillstand wieder anläuft, auch in Abhängigkeit hiervon die Wahldrehzahl eingestellt werden muß.
- Figur 3 zeigt, daß überdies diese Wahldrehzahl nicht nur von der Dauer der Stillstandszeit abhängt, sondern auch von der Art des Artikels der mit der Maschine gewebt wird.
- So zeigt die Figur 3 einen Artikel 1 mit einer Kurve 19, die sich bei verschiedenen Stillstandszeiten in den Punkten 20,21,22 ergibt. Eine vollkommen andere ideale Wahldrehzahl ergibt sich in Abhängigkeit von der Stillstandszeit in der Kurve 17 oder der Kurve 18.
- Man sieht also hieraus, daß die Wahldrehzahl nicht nur von den oben genannten Parametern nach Figur 2 abhängt, sondern auch noch von der Dauer der Stillstandszeit und von der Art des verarbeiteten Artikels.
- Figur 2 zeigt also, daß man die Wahldrehzahl in Richtung des Pfeiles 15 verändern sollte, wobei die Pfeilrichtung 15 auch noch die Ursache des Stillstandes beinhaltet, nämlich die Frage ob ein Schußbruch oder ein Kettbruch stattfand oder andere Ursachen für das Stillsetzen.
- Ferner zeigt die Figur 2, daß sich verschiedene Idealkurven 10,11,12 ergeben, je nachdem welche Öltemperatur, welcher Ketthebungsweg, welche Bindungsart und welche Schäftezahl die Maschine aufweist.
- Um diese verschiedenstartigen Parameter zu beherrschen und um immer stets in Anhängigkeit von der Stillstandszeit und den sonstigen Parametern einen optimalen Hochlauf zu gewährleisten, wird also die erfindungsgemäße Regelung vorgesehen.
- Die Figur 4 zeigt überdies, daß die Kurven 23,24,25 eine vollkommen andere Formgebung aufweisen wie die Kurven 17,18,19 der Figur 3, wenn eine andere Ursache für den Stillstand festgestellt wurde, wie z. B. ein Schußbruch oder eine unterschiedliche Bindungsart im Vergleich zu den Kurven nach Figur 3.
- Die Webmaschine nach der vorliegenden Erfindung erhält also eine künstliche Intelligenz, was das Anlaufprogramm dieser Webmaschine betrifft. Nur über die Ermittlung der Stillstandszeit werden diese verschiedenartigen Parameter beherrscht, ohne daß es zu den eingangs beschriebenen Gewebefehlern kommt.
Claims (4)
- Verfahren zum Anwerfen von mit einem elektromotorischen Hauptantrieb ausgerüsteten Webmaschinen, wobei vor dem durch einen Schaltbefehl einzuleitenden Einrücken der Kupplung die Schwungmassen mit einer gegenüber der für den Betrieb der Webmaschine vorgesehenen Nenndrehgeschwindigkeit erhöhten Drehgeschwindigkeit umlaufen und nach dem Einrücken der Kupplung für eine Übergangsphase die Schwungmassen vom elektromotorischen Antrieb getrennt sind, wobei durch den das Einkuppeln steuernden Schaltbefehl der elektromotorische Antrieb vorübergehend freigeschaltet wird und anschließend die reguläre Speisung des elektromotorischen Antriebs mit Verzögerung beim Absinken der momentanen Drehgeschwindigkeit der Schwungmassen in den Bereich der Nenndrehgeschwindigkeit der Webmaschine erfolgt,
dadurch gekennzeichnet, daß von der Maschinensteuerung die Stillstandszeit ermittelt wird, die Ursache des Stillstandes sowie die Art der zum Zeitpunkt des Stillstandes in der Maschine verarbeiteten Bindung, daß diese Parameter an einen Prozessor (Mikroprozessor) weitergeleitet werden, der die Parameterdaten verarbeitet und entsprechend dem Ergebnis der Verarbeitung aus einer Bibliothek zum Hochlauf der Maschine ein dem Ergebnis zugeordnetes Programm auswählt, das über die Maschinensteuerung das Hochlaufen der Maschine steuert. - Verfahren nach Anspruch 1, dadurch gekennzeichnet, daß als Parameter auch die Temperatur und/oder die Luftfeuchtigkeit sowie ggf. auch weitere relevante Daten im Bereich der Kettfäden bzw. des Webfaches berücksichtigt werden.
- Verfahren nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß die Hochlaufdrehzahl in einer Regelung in ständigem Vergleich mit der Ist-Drehzahl angefahren wird.
- Verfahren nach einem der Ansprüche 1 - 3 ,
dadurch gekennzeichnet, daß der Prozessor auch den Warenabzugsregulator und/oder den Kettregulator der Maschine regelt.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE3921318A DE3921318A1 (de) | 1989-06-29 | 1989-06-29 | Verfahren zum anwerfen einer webmaschine |
| DE3921318 | 1989-06-29 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0406532A1 EP0406532A1 (de) | 1991-01-09 |
| EP0406532B1 true EP0406532B1 (de) | 1994-03-23 |
Family
ID=6383870
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP90107483A Expired - Lifetime EP0406532B1 (de) | 1989-06-29 | 1990-04-19 | Verfahren zum Anwerfen einer Webmaschine |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP0406532B1 (de) |
| JP (1) | JPH0340841A (de) |
| DE (2) | DE3921318A1 (de) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4123671A1 (de) * | 1991-07-17 | 1993-01-21 | Berger Lahr Gmbh | Webmaschine |
| DE19914131A1 (de) * | 1999-03-27 | 2000-10-05 | Dornier Gmbh Lindauer | Verfahren zum Anwerfen von mit einem elektromotorischen Hauptantrieb ausgerüsteten Webmaschinen |
| IT1312165B1 (it) * | 1999-04-01 | 2002-04-09 | Somet Soc Mec Tessile | Dispositivo e metodo di controllo della velocita' di rotazione delmotore principale di un telaio di tessitura. |
| DE102005023929B3 (de) * | 2005-05-24 | 2006-09-14 | Lindauer Dornier Gesellschaft Mit Beschränkter Haftung | Verfahren zum Betreiben einer Projektilwebmaschine |
| DE102007020907B4 (de) * | 2007-04-26 | 2020-04-23 | Picanol | Verfahren und Vorrichtung zum Anfahren einer Webvorrichtung |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1066936A (en) * | 1965-04-09 | 1967-04-26 | Btr Industries Ltd | A releasable pipe coupling |
| DE3247066A1 (de) * | 1982-02-25 | 1983-09-01 | Veb Kombinat Textima, Ddr 9010 Karl-Marx-Stadt | Antriebssystem fuer textilmaschinen mit einer stufenlosen drehzahlregelung |
| JPS59157355A (ja) * | 1983-02-28 | 1984-09-06 | 株式会社豊田自動織機製作所 | 織機の運転開始方法 |
| JPH06102861B2 (ja) * | 1984-09-25 | 1994-12-14 | 津田駒工業株式会社 | 織機の電動送り出し装置におけるキツクバツク制御方法およびその装置 |
| JPS6221845A (ja) * | 1985-07-22 | 1987-01-30 | 株式会社豊田自動織機製作所 | 織機における止段発生防止方法 |
| DE3542650A1 (de) * | 1985-12-03 | 1987-06-04 | Stromag Maschf | Verfahren und vorrichtung zur steuerung und/oder regelung des anfahrvorganges einer webmaschine |
| CH668997A5 (en) * | 1985-12-16 | 1989-02-15 | Zellweger Uster Ag | Re-start working parameter control - for weaving loom by warp tension sensor and microcomputer with memory |
| JPS63175144A (ja) * | 1986-12-27 | 1988-07-19 | リンダウェル、ドルニエ、ゲゼルシャフト、ミット、ベシュレンクテル、ハフツング | 主電動駆動装置が装備されている織機の始動方法とその電気回路 |
| DE3733590A1 (de) * | 1986-12-27 | 1988-07-07 | Dornier Gmbh Lindauer | Verfahren und schaltungsanordnung zum anwerfen von mit einem elektrischen hauptantrieb ausgeruesteten webmaschinen |
-
1989
- 1989-06-29 DE DE3921318A patent/DE3921318A1/de not_active Withdrawn
-
1990
- 1990-04-19 DE DE90107483T patent/DE59005062D1/de not_active Expired - Fee Related
- 1990-04-19 EP EP90107483A patent/EP0406532B1/de not_active Expired - Lifetime
- 1990-06-25 JP JP2166554A patent/JPH0340841A/ja active Granted
Also Published As
| Publication number | Publication date |
|---|---|
| JPH0340841A (ja) | 1991-02-21 |
| DE59005062D1 (de) | 1994-04-28 |
| JPH0380903B2 (de) | 1991-12-26 |
| EP0406532A1 (de) | 1991-01-09 |
| DE3921318A1 (de) | 1991-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0350447B1 (de) | Verfahren zur Kettspannungssteuerung und Webmaschine mit Kettspannungsorgane | |
| DE3435049A1 (de) | Regeleinrichtung fuer den drehantrieb einer abwickelvorrichtung, insbesondere eines kettbaumes einer webmaschine | |
| EP0406532B1 (de) | Verfahren zum Anwerfen einer Webmaschine | |
| EP1048769B1 (de) | Verfahren zum Anwerfen von mit einem elektromotorischen Hauptantrieb ausgerüsteten Webmaschinen | |
| EP2694711A2 (de) | Verfahren und webmaschine zur webfachbildung | |
| EP0648875B1 (de) | Verfahren zur Vermeidung von Anlassstellen im Gewebe in einer Webmaschine | |
| EP2683862B1 (de) | Schaftwebmaschine und entsprechendes webverfahren | |
| DE4325038C2 (de) | Regeleinrichtung für den Vorschub von Wickelgut einer Webmaschine | |
| DE3247066A1 (de) | Antriebssystem fuer textilmaschinen mit einer stufenlosen drehzahlregelung | |
| WO2003071017A1 (de) | Verfahren zum betreiben einer antriebsanordnung einer webmaschine und fachbildemaschine mit getrennter antriebstechnik | |
| DE3520244A1 (de) | Warenabzugseinrichtung an einer webmaschine | |
| EP1335052B1 (de) | Verfahren und Vorrichtung zur Einstellung und Überwachung der Kettfadenspannung an Webmaschinen | |
| DE19913398C2 (de) | Verfahren zur Bestimmung der Startzeit des Schusseintrags bei Drehzahlwechsel des Hauptantriebs einer Luftdüsenwebmaschine | |
| EP2142692B1 (de) | Verfahren und vorrichtung zum anfahren einer webvorrichtung | |
| EP0715010A1 (de) | Verfahren zur Vermeidung von Gewebefehlern in Glatt- und Polgeweben | |
| DE10000146A1 (de) | Verfahren und Vorrichtung zur Steuerung einer Komponente einer eine Vielzahl gleichartiger Arbeitssteilen nebeneinander aufweisenden Textilmaschine | |
| DE2716282A1 (de) | Verfahren und vorrichtung zur fadenbeeinflussung bei der herstellung von florgeweben | |
| EP2118350B1 (de) | Verfahren zum ansteuern von antriebsmotoren und steuerung für antriebsmotoren einer webmaschine | |
| DE69934151T2 (de) | Vorrichtung und Verfahren zur Regelung der Drehzahl des Hauptmotors einer Webmaschine | |
| DE102023206380B3 (de) | Verfahren zum betreiben einer luftdüsenwebmaschine und luftdüsenwebmaschine | |
| EP0567428B1 (de) | Verfahren zum Starten einer Webmaschine und Webmaschine zur Durchführung des Verfahrens | |
| DE102005023929B3 (de) | Verfahren zum Betreiben einer Projektilwebmaschine | |
| EP0629725A1 (de) | Verfahren zum Starten einer Webmaschine und Webmaschine zur Durchführung des Verfahrens | |
| DE102018216803B3 (de) | Verfahren zum Wechsel der Betriebsdrehzahl einer Webmaschine sowie entsprechende Webmaschine | |
| EP0950740A1 (de) | Verfahren zum Vermeiden von Webfehlern bei der Gewebebildung in einer Webmaschine, sowie Webmaschinen zur Durchführung des Verfahrens |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): BE CH DE FR GB IT LI |
|
| 17P | Request for examination filed |
Effective date: 19910604 |
|
| 17Q | First examination report despatched |
Effective date: 19930705 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): BE CH DE FR GB IT LI |
|
| REF | Corresponds to: |
Ref document number: 59005062 Country of ref document: DE Date of ref document: 19940428 |
|
| ITF | It: translation for a ep patent filed | ||
| ET | Fr: translation filed | ||
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19940816 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20040302 Year of fee payment: 15 Ref country code: FR Payment date: 20040302 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20040309 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20040402 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20040728 Year of fee payment: 15 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20050419 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050419 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050430 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050430 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050430 |
|
| BERE | Be: lapsed |
Owner name: LINDAUER *DORNIER G.M.B.H. Effective date: 20050430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20051101 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20050419 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20051230 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20051230 |
|
| BERE | Be: lapsed |
Owner name: LINDAUER *DORNIER G.M.B.H. Effective date: 20050430 |