-
Hintergrund der Erfindung
-
Gebiet der Erfindung
-
Die
vorliegende Erfindung bezieht sich auf eine Vorrichtung und ein
Verfahren für
digitale drahtlose Kommunikationen, wobei ein Mehrwert-Modulations-Typ
verwendet wird.
-
Beschreibung der zugehörigen Technik
-
In
einem herkömmlichen
digitalen, mobilen, drahtlosen Kommunikationssytem wird ein bekanntes
Beispiel des Frame-Konfigurationsverfahrens in „Terrestrial Mobile Communication
16QAM Fading Distortion Compensation Method" (Sanbe, TECHNICAL REPORT OF IEI-CE, B-II, Vol. J-72-B-II,
No. 1, pp. 7–15,
Jan. 1989) beschrieben, um eine Frequenzverschiebung abzuschätzen. 1 zeigt
eine Frame-Konfiguration gemäß einem
16QAM-System.
-
Wie
in 1 gezeigt, weist diese Frame-Konfiguration ein
Pilotsymbol auf, das für
jedes N-1te Informationssymbol eingefügt ist.
Durch solch eine Frame-Konfiguration wird eine quasikohärente Ermittlung
durch das Abschätzen
der Referenz-Phase, der Größe der Frequenzverschiebung
und der Größe der Amplitudenverzerrung
durchgeführt,
wobei Pilotsymbole verwendet werden.
-
Wehrend
der quasi-kohärenten
Ermittlung mit solch einer Frame-Konfiguration mit einem Pilotsymbol, das
für alle
paar Informationssymbole eingefügt
ist, bekommt die Symbolsynchronisation jedoch Jitter. Deshalb verschlechtert
sich bei der quasi-kohärenten
Ermittlung mit Symbolen, deren Symbolsynchronisation nicht vollständig aufgebaut
ist, die Genauigkeit bei dem Abschätzen der Referenz-Phase, der
Größe der Frequenzverschiebung
und der Größe der Amplititudenverzerrung,
wenn Pilotsymbole verwendet werden. Dies führt zu einer Verschlechterung
einer Bit-Fehlerraten-Kennlinie bei dem Störabstand.
-
Dies
wird genauer erklärt,
indem 2A und 2B verwendet
werden. 2A und 2B sind
Diagramme, um die Beziehung zwischen der Zeit und der Amplitude
eines Empfangssignals zu erklären.
In 2 bezeichnet Bezugszeichen 1 die
Zeit, sobald das Pilotsymbol 3 mit einer idealen Richtzeit
ermittelt wird und Bezugszeichen 2 bezeichnet die Zeit,
sobald das Pilotsymbol 3 mit einer erzeugten Zeitverschiebung
(Jitter) ermittelt wird. Bezugszeichen 4 bezeichnet die
Informationssymbole unmittelbar vor und nach dem Pilotsymbol 3.
-
Sowohl
ein Sender als auch ein Empfänger
sind mit ihren entsprechenden Takterzeugungsfunktionen ausgestattet.
Deswegen weist der Empfänger
unterschiedliche Takterzeugungsquellen auf, und deshalb kann der
Empfänger
Wellen bei dem Zeitablauf wie etwa der Zeit 2 ermitteln,
zu welcher sich eine Zeitverschiebung von der idealen Richtzeit 1 ereignet
hat. Wie in 2A und 2B gezeigt,
erzeugt zu dieser Zeit die Zeitverschiebung Fehler (Amplitudenfehler)
XI und XQ von dem
Signalpunkt. Dieses verschlechtert die Fehlerrate. Weiterhin schätzt der
Empfänger
die Phase, die Amplitudenvariation und die Frequenzverschiebung
auf der I-Q-Ebene von dem Pilotsymbol ab. Sobald es jedoch zu der
Zeit 2 ermittelt wird, sobald die Zeitverschiebung auftrat,
weist das Pilotsymbol einen Fehler von dem Pilotsymbol-Signalpunkt
auf, und deshalb verschlechtert sich die Genauigkeit bei dem Abschätzen der
Phase, der Amplitudenvariation und der Frequenzverschiebung.
-
EP0734 132 legt ein Verfahren
und eine Vorrichtung für
das Modulieren von Referenzsymbolen und Informationssymbolen mit
entsprechenden unterschiedlichen Modulationstypen offen.
-
Übersicht über die Erfindung
-
Es
ist ein Ziel der vorliegenden Erfindung, eine Vorrichtung und ein
Verfahren für
digitale drahtlose Kommunikationen bereitzustellen, die in der Lage
sind, die Genauigkeit bei dem Abschätzen der Referenz-Phase und
der Größe der Frequenzverschiebung
zu verbessern, sobald der Empfänger
(die Demodulations-Seite) die quasi-kohärente Bestimmung durchführt und
die Bit-Fehlerraten-Kennlinie bei dem Störabstand zu verbessern.
-
Dieses
Ziel wird durch die Eigenschaften der Ansprüche 1 und 6 erreicht.
-
Dies
ermöglicht
es, die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
zu unterbinden, wobei Pilotsymbole bei der quasi-kohärenten Ermittlung
mit Symbolen verwendet werden, deren Symbolsynchronisation nicht
vollständig
aufgebaut ist und die Bit-Fehlerraten-Kennlinie bei dem Störabstand
zu verbessern.
-
Weiterhin
wird dieses Ziel auch durch eine digitale drahtlose Kommunikationsvorrichtung
erreicht, welche die Amplitude an Pilotsymbol-Signalpunkten mehr
als die maximale Amplitude an Signalpunkten gemäß dem Mehrwert-Modulationstyp
mit 8 oder mehr Werten erhöht.
-
Diese
Vorrichtung kann nicht nur die Verschlechterung bei der Genauigkeit
bei dem Abschätzen
der Referenz-Phase, der Größe der Frequenzverschiebung
durch ein Pilotsymbol bei der quasi-kohärenten Ermittlung mit Symbolen
unterbinden, deren Symbolsynchronisation nicht vollständig aufgebaut
ist, sondern kann auch die Bit-Fehlerraten-Kennlinie bei dem Störabstand
verbessern, ohne den Wirkungsgrad des Leistungsverstärkers auf
der Senderseite zu verschlechtern.
-
Kurze Beschreibung der Zeichnungen
-
Das
obige Ziel und weitere Ziele und Eigenschaften der Erfindung werden
sich nachstehend vollständiger
durch eine Betrachtung der folgenden Beschreibung zeigen, die in
Verbindung mit den begleitenden Zeichnungen durchgeführt wird,
worin ein Beispiel beispielhaft dargestellt wird, in denen Folgendes
gilt:
-
1 ist
ein Diagramm, das ein Beispiel einer Frame-Konfiguration einer herkömmlichen
digitalen drahtlosen Kommunikationsvorrichtung zeigt;
-
2A ist
ein Diagramm, das eine Beziehung zwischen der Amplitude und der
Zeit zeigt, sobald ein Empfangssignal (die I-Komponente) empfangen
wird;
-
2B ist
ein Diagramm, das eine Beziehung zwischen der Amplitude und der
Zeit zeigt, sobald ein Empfangssignal (die Q-Komponente) empfangen
wird;
-
3 ist
ein Diagramm, das ein anderes Beispiel der Frame-Konfiguration der
herkömmlichen
digitalen drahtlosen Kommunikationsvorrichtung zeigt;
-
4 ist
ein Diagramm, das eine Konfiguration der Senderseite einer digitalen
drahtlosen Kommunikationsvorrichtung der vorliegenden Erfindung
zeigt;
-
5 ist
ein Diagramm, das eine Konfiguration der Empfängerseite der digitalen drahtlosen
Kommunikationsvorrichtung der vorliegenden Erfindung zeigt;
-
6A ist
ein Diagramm, das ein Beispiel einer Frame-Konfiguration einer digitalen
drahtlosen Kommunikationsvorrichtung der vorliegenden Erfindung
zeigt;
-
6B ist
ein Diagramm, das eine Beziehung zwischen der Amplitude und der
Zeit zeigt, sobald ein Empfangssignal (die I-Komponente) empfangen
wird;
-
6C ist
ein Diagramm, das eine Beziehung zwischen der Amplitude und der
Zeit zeigt, sobald ein Empfangssignal (die Q-Komponente) empfangen
wird;
-
7 ist
ein Diagramm, das ein Beispiel für
ein Signal-Raumdiagramm gemäß einem
16APSK-Modulationstyp in der digitalen drahtlosen Kommunikationsvorrichtung
der vorliegenden Erfindung zeigt;
-
8 ist
ein Diagramm, das ein Beispiel für
eine Frame-Konfiguration gemäß dem 16APSK-Modulationstyp in
der digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt;
-
9 ist
ein Diagramm, das ein Beispiel für
ein Signal-Raumdiagramm gemäß einem
Mehrwert-QAM-System mit 8 oder mehr Werten in der digitalen drahtlosen
Kommunikationsvorrichtung der vorliegenden Erfindung zeigt;
-
10 ist
ein Diagramm, das ein Beispiel für
eine Frame-Konfiguration gemäß dem Mehrwert-QAM-System
mit 8 oder mehr Werten in der digitalen drahtlosen Kommunikationsvorrichtung
der vorliegenden Erfindung zeigt;
-
11 ist
ein Diagramm, das ein Beispiel für
ein Signal-Raumdiagramm gemäß einem
64QAM-System in der digitalen drahtlosen Kommunikationsvorrichtung
der vorliegenden Erfindung zeigt;
-
12 ist
ein Diagramm, das ein Beispiel für
eine Frame-Konfiguration gemäß dem 64QAM-System in
der digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt;
-
13 ist
ein Diagramm, das ein anderes Beispiel für ein Signal-Raumdiagramm gemäß dem 64QAM-System
in der digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt;
-
14 ist
ein Diagramm, das ein weiteres Beispiel für ein Signal-Raumdiagramm gemäß dem 64QAM-System
in der digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt;
-
15 ist
ein Diagramm, das ein Beispiel für
ein Signal-Raumdiagramm gemäß einem
32QAM-System in der digitalen drahtlosen Kommunikationsvorrichtung
der vorliegenden Erfindung zeigt;
-
16 ist
ein Diagramm, das ein Beispiel für
eine Frame-Konfiguration gemäß dem 32QAM-System in
der digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt;
-
17 ist
ein Diagramm, das ein Beispiel für
ein Signal-Raumdiagramm gemäß einem
16QAM-System in der digitalen drahtlosen Kommunikationsvorrichtung
der vorliegenden Erfindung zeigt;
-
18 ist
ein Diagramm, das ein Beispiel für
eine Frame-Konfiguration gemäß dem 16QAM-System in
der digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt;
-
19 ist
ein Diagramm, das ein anderes Beispiel für ein Signal-Raumdiagramm gemäß dem 16QAM-System
in der digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt;
-
20 ist
ein Diagramm, das ein weiteres Beispiel für ein Signal-Raumdiagramm gemäß dem 16QAM-System
in der digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt;
-
21 ist
ein Diagramm, das ein Beispiel für
ein Signal-Raumdiagramm eines Signalpunkts gemäß einem QPSK-Modulationstyp,
einen Pilotsymbol-Signalpunkt und jedes Symbol unmittelbar vor und
nach dem Pilotsymbol zeigt;
-
22 ist
ein Diagramm, das ein Beispiel für
eine Frame-Konfiguration von QPSK-Modulationssymbolen und Pilotsymbolen
zeigt;
-
23 ist
ein Diagramm, das ein Beispiel für
ein Signal-Raumdiagramm von π/4-Shift-DQPSK-Modulationstyp-Signalpunkten,
von Pilotsymbol-Signalpunkten und von jedem einzelnen Symbol unmittelbar
vor und nach dem Pilotsymbol zeigt;
-
24 ist
ein Diagramm, das ein Beispiel für
eine Frame-Konfiguration von π/4-Shift-DQPSK-Modulationstyp-Signalpunkten
und von Pilotsymbolen zeigt;
-
25 ist
ein Diagramm, das ein Signal-Raumdiagramm gemäß einem 16QAM-System in der
digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt; und
-
26 ist
ein Diagramm, das eine Beziehung zwischen der Eingangsleistung und
der Ausgangsleistung eines Verstärkers
in der digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt.
-
Ausführliche
Beschreibung der bevorzugten Ausführungsformen
-
Wie
in 2A und 2B gezeigt,
tritt ein Fehler von dem Signalpunkt 3 eines Pilotsymbols
auf, wenn eine Empfangsignal zu der Zeit 2 ermittelt wird,
zu welcher eine Zeitverschiebung erzeugt wird, und deshalb können die
Amplitudenfehler XI und XQ auftreten.
-
Deswegen
verschlechtert sich die Genauigkeit bei dem Abschätzen der
Phase, der Amplitudenvariation und der Frequenzverschiebung auf
der I-Q-Ebene.
-
Wie
in 3 gezeigt, besteht zu diesem Zeitpunkt die einfachste
Pilotsymbol-Konfiguration mit 3 fortlaufenden Pilotsymbolen. Bei
solch einer Konfiguration vermindert sich der Fehler von einem Pilotsymbol-Signalpunkt,
selbst wenn eine Zeitverschiebung auftritt, weil es 3 fortlaufende
Pilotsymbole gibt.
-
Weil
keine Pilotsymbole unmittelbar vor und nach dem Pilotsymbol übertragen
werden, um die Information zu übertragen,
ergibt sich daraus jedoch ein Problem in Bezug auf die Übertragungsleistungsfähigkeit. Deshalb
unterbindet die vorliegende Erfindung die Verschlechterung der Informationsübertragungs-Leistungsfähigkeit
und unterbindet die Fehler von den Pilotsymbol-Signalpunkten, sobald
eine Zeitverschiebung durch Modulationssymbole unmittelbar vor und
nach einem Pilotsymbol gemäß einem
Modulationstyp auftritt, der sich von dem Pilotsymbol-Modulationstyp
unterscheidet. Deshalb kann die vorliegende Erfindung die Verschlechterung
der Fehlerrate unterbinden, indem sie die Verschlechterung der Genauigkeit
bei dem Abschätzen
der Phase, der Amplitudenvariation und der Frequenzverschiebung
auf der I-Q-Ebene unterbindet.
-
Als
den Mehrwert-Modulationstyp beinhaltet die vorliegende Spezifikation
ein 64QAM-System,
ein 32QAM-System, ein 16QAM-System, einen 8PSK-Modulationstyp, einen
QPSK-Modulationstyp, einen 16APSK-Modulationstyp und einen π/4-Shift-DQPSK-Modulationstyp
-
Unter
Bezug auf die beigefügten
Zeichnungen werden nun nachstehend die Ausführungsformen der vorliegenden
Erfindung im Einzelnen erklärt.
-
(Ausführungsform
1)
-
4 ist
ein Blockdiagramm, das eine Konfiguration der Senderseite einer
digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt. 5 ist ein Blockdiagramm, das
eine Konfiguration der Empfängerseite
einer digitalen drahtlosen Kommunikationsvorrichtung der vorliegenden
Erfindung zeigt. 6A ist ein Diagramm, das eine
Frame-Konfiguration
zeigt, die in der digitalen drahtlosen Kommunikationsvorrichtung
der vorliegenden Erfindung verwendet wird.
-
Das
Folgende ist eine Erklärung
eines Falls, bei dem ein Modulationstyp als ein Mehrwert-Modulationstyp verwendet
wird.
-
Auf
der Senderseite, die in 4 gezeigt wird, werden Übertragungsdaten
zu dem Abschnitt für
die Erzeugung des Quadratur-Basisband-Signals (für den Mehrwert-Modulationstyp) 101 und
dem Abschnitt für die
Erzeugung des Quadratur-Basisband-Signals (für den Modulationstyp für Symbole
unmittelbar vor und nach dem PL) 102 gesendet. Der Abschnitt
für die
Erzeugung des Frame-Zeitablaufsignals 108 erzeugt ein Frame-Zeitablaufsignal
bei dem Zeitablauf, der eine Frame-Konfiguration anzeigt, die in 6A gezeigt
wird und gibt das Frame-Zeitablaufsignal an den Abschnitt für die Erzeugung
des Quadratur-Basisband-Signals
(für den
Mehrwert-Modulationstyp) 101, den Abschnitt für die Erzeugung
des Quadratur-Basisband-Signals (für den Modulationstyp für Symbole
unmittelbar vor und nach dem PL) 102 und den Abschnitt
für die
Erzeugung des Quadratur-Basisband-Signals (für das PL) 103 aus.
-
Der
Abschnitt für
die Erzeugung des Quadratur-Basisband-Signals (für den Mehrwert-Modulationstyp) 101 empfängt Übertragungsdaten
und ein Frame-Zeitablaufsignal als Eingänge, und wenn das Frame-Zeitablaufsignal
ein Mehrwert-Modulationssymbol anzeigt, gibt der Abschnitt für die Erzeugung
des Quadratur-Basisband-Signals (für den Mehrwert-Modulationstyp) 101 die
I-Komponente des Abschnitts für
die Erzeugung des Quadratur-Basisband-Signals
für den
Mehrwert-Modulationstyp an den I-Komponenten-Schaltabschnitt 104 aus
und gibt die Q-Komponente des Abschnitts für die Erzeugung des Quadratur-Basisband-Signals
für den
Mehrwert-Modulationstyp an den Q-Komponenten-Schaltabschnitt 105 aus.
-
Der
Abschnitt für
die Erzeugung des Quadratur-Basisband-Signals (für den Modulationstyp für Symbole
unmittelbar vor und nach dem PL) 102 empfangt Übertragungsdaten
und ein Frame-Zeitablaufsignal als Eingänge, und wenn das Frame-Zeitablaufsignal
ein Symbol unmittelbar vor oder nach dem Pilotsymbol anzeigt, gibt
der Abschnitt für
die Erzeugung des Quadratur-Basisband-Signals (für den Modulationstyp für Symbole
unmittelbar vor und nach dem PL) 102 die I-Komponente des
Abschnitts für
die Erzeugung des Quadratur-Basisband-Signals für den Modulationstyp für Symbole
unmittelbar vor und nach dem PL an den Komponenten-Schaltabschnitt 104 aus
und gibt die Q-Komponente des Quadratur-Basisband-Signals für den Modulationstyp
für Symbole
unmittelbar vor und nach dem PL an den Q-Komponenten-Schaltabschnitt 105 aus.
-
Der
Abschnitt für
die Erzeugung des Quadratur-Basisband-Signals (für das PL) 103 empfängt ein
Frame-Zeitablaufsignal als einen Eingang, und wenn das Frame-Zeitablaufsignal
ein Pilotsymbol anzeigt, gibt der Abschnitt für die Erzeugung des Quadratur-Basisband-Signals (für das PL) 103 die
I-Komponente des Pilotsymbol-Quadratur-Basisband-Signals an den
I-Komponenten-Schaltabschnitt 104 aus und gibt die Q-Komponente
des Pilotsymbol-Quadratur-Basisband-Signals an den Q-Komponenten-Schaltabschnitt 105 aus.
-
Der
I-Komponenten-Schaltabschnitt 104 empfängt die I-Komponente des Quadratur-Basisband-Signals
für den
Mehrwert-Modulationstyp, die I-Komponente des Quadratur-Basisband-Signals
für die
Symbole unmittelbar vor und nach dem PL und die I-Komponente des
PI-Quadratur-Basisband-Signals und ein Frame-Zeitablaufsignal als
Eingänge
und schaltet zwischen der I-Komponente des Quadratur-Basisband-Signals für den Mehrwert-Modulationstyp, der
I-Komponente des Quadratur-Basisband-Signals für Symbole unmittelbar vor und
nach dem PL und der I-Komponente des Pilotsymbol-Quadratur-Basisband-Signals gemäß dem Frame-Zeitablaufsignal
um und gibt sie an einen Abschnitt für die Funkfrequenz (der Funkabschnitt) 106 als die
I-Komponente des Übertragungs-Quadratur-Basisband-Signals
aus.
-
Der
Q-Komponenten-Schaltabschnitt 105 empfängt die Q-Komponente des Quadratur-Basisband-Signais
für den
Mehrwert-Modulationstyp, die Q-Komponente des Quadratur-Basisband-Signals
für Symbole
unmittelbar vor und nach dem PL und die Q-Komponente des PI-Quadratur-Basisband-Signals
und ein Frame-Zeitablaufsignal als Eingänge und schaltet zwischen der
Q-Komponente des Quadratur-Basisband-Signals für den Mehrwert-Modulationstyp, der
Q-Komponente des Quadratur-Basisband-Signals für Symbole unmittelbar vor und
nach dem PL und der Q-Komponente des Pilotsymbol-Quadratur-Basisband- Signals gemäß dem Frame-Zeitablaufsignal
um und gibt sie an den Funkabschnitt 106 als die Q-Komponente
des Übertragungs-Quadratur-Basisband-Signals
aus.
-
Der
Funkabschnitt 106 empfängt
die I-Komponente und die Q-Komponente des Übertragungs-Quadratur-Basisband-Signals
als Eingänge,
führt die
vorher bestimmte Funkbearbeitung für das Basisband-Signal aus
und gibt dann ein Übertragungssignal
aus. Dieses Übertragungssignal
wird durch den Leistungsverstärker 107 verstärkt und
das verstärkte Übertragungssignal
wird von der Übertragungsantenne 109 ausgegeben.
-
Auf
der Empfängerseite,
die in 5 gezeigt wird, empfangt der Funkabschnitt 202 das
Signal, das er von der Antenne 201 als einen Eingang empfängt, quadraturmoduliert
das Eingangssignal und gibt die I-Komponente und die Q-Komponente
des Empfangs-Quadratur-Basisband-Signals
aus.
-
Der
Abschnitt für
die Erzeugung des Frame-Zeitablaufsignals 205 empfängt die
I-Komponente und
die Q-Komponente des Empfangs-Quadratur-Basisband-Signals als Eingänge, ermittelt
eine Frame-Konfiguration, die in 6A gezeigt
wird und gibt ein Frame-Zeitablaufsignal
an den Abschnitt für
die Ermittlung des Mehrwert-Modulationstyps 207, den Abschnitt
für das
Abschätzen
der Größe der Frequenzverschiebung 204 und
den Abschnitt für
die Ermittlung des Modulationstyps (für Symbole unmittelbar vor und
nach dem PL) 208 aus.
-
Der
Abschnitt für
das Abschätzen
der Größe der Amplitudenverzerrung 203 empfängt die
I-Komponente und
die Q-Komponente des Empfangs-Quadratur-Basisband-Signals und des
Frame-Zeitablaufsignals als Eingänge,
extrahiert ein Pilotsymbol, schätzt
die Größe der Amplitudenverzerrung
von der I-Komponente und der Q-Komponente des Pilotsymbol-Quadratur-Basisband-Signals
ab und gibt das Signal für
das Abschätzen
der Amplitudenverzerrung an den Abschnitt für die Ermittlung des Mehrwert-Modulationstyps 207 und
den Abschnitt für
die Ermittlung des Modulationstyps (für Symbole unmittelbar vor und
nach dem PL) 208 aus.
-
Der
Abschnitt für
das Abschätzen
der Größe der Frequenzverschiebung 204 empfängt die
I-Komponente und
die Q-Komponente des Empfangs-Quadratur-Basisband-Signals und des
Frame-Zeitablaufsignals als Eingänge,
extrahiert ein Pilotsymbol, schätzt
die Größe der Frequenzverschiebung
von der I-Komponente und der Q-Komponente des Pilotsymbol-Quadratur-Basisband-Signals
ab und gibt das Signal für
das Abschätzen
der Frequenzverschiebung an den Abschnitt für die Ermittlung des Mehrwert-Modulationstyps 207 und
den Abschnitt für
die Ermittlung des Modulationstyps (für Symbole unmittelbar vor und
nach dem PL) 208 aus.
-
Der
Abschnitt für
die Ermittlung des Mehrwert-Modulationstyps 207 empfängt die
I-Komponente und die
Q-Komponente des Empfangs-Quadratur-Basisband-Signals, des Frame-Zeitablaufsignals,
das Signal für das
Abschätzen
der Größe der Amplitudenverzerrung
und das Signal für
das Abschätzen
der Frequenzverschiebung als Eingänge, führt die Ermittlung aus, sobald
der Eingang ein Mehrwert-Modulationstyp-Symbol ist und gibt ein
digitales Empfangssignal gemäß dem Mehrwert-Modulationstyp
aus.
-
Der
Abschnitt für
die Ermittlung des Modulationstyps (für Symbole unmittelbar vor und
nach dem PL) 208 empfängt
die I-Komponente und die Q-Komponente des Empfangs-Quadratur-Basisband-Signals,
das Frame-Zeitablaufsignal, das Signal für das Abschätzen der Größe der Amplitudenverzerrung
und das Signal für
das Abschätzen
der Frequenzverschiebung als Eingänge, führt die Ermittlung aus, sobald
die Eingänge Symbole
unmittelbar vor und nach einem Pilotsymbol sind und gibt ein digitales
Empfangssignal gemäß dem Modulationstyp
der Symbole unmittelbar vor und nach dem Pilotsymbol aus.
-
In
der digitalen drahtlosen Kommunikationsvorrichtung in der obigen
Konfiguration wird ein Signal in einer Frame-Konfiguration übertragen/empfangen,
wie in 6A gezeigt wird. Das heißt, dass
der Modulationstyp, der Pilotsymbole moduliert, sich von dem Modulationstyp
unterscheidet, der das Symbol 301 unmittelbar vor dem Pilotsymbol
und das Symbol 302 unmittelbar nach dem Pilotsymbol moduliert.
Es ist besonders wünschenswert,
dass die Anzahl der Mehrwerts bei dem Modulationstyp für das Modulieren
der Symbole unmittelbar vor und nach dem Pilotsymbol kleiner ist
als die Anzahl der Mehrwerts bei dem Modulationstyp für das Modulieren
der Pilotsymbole.
-
Wenn
zum Beispiel, wie in 6B und 6C gezeigt,
der Modulationstyp des Pilotsymbols 305 die QPSK-Modulation
ist und der Modulationstyp des Symbols 306 unmittelbar
vor und nach dem Pilotsymbol 16QAM ist, sobald eine Zeitverschiebung
(Jitter) von der idealen Richtzeit 303 eintritt (die Zeit 304),
treten die Fehler (Amplitudenfehler) Y1 und
YQ von dem Signalpunkt wegen der Zeitverschiebung
auf. Diese Fehler (Amplitudenfehler) YI und
YQ sind viel kleiner als die Amplitudenfehler
XI und XQ, die in 2A und 2B gezeigt werden.
-
Deshalb
ist es möglich,
Fehler von den Pilotsymbol-Signalpunkten zu unterbinden, sobald
eine Zeitverschiebung eintritt, während die Verschlechterung
der Informations-Übertragungsleistungsfähigkeit
unterbunden wird, weil der Modulationstyp für die Modulation der Pilotsymbole
verschieden ist von dem Modulationstyp für die Modulation der Symbole
unmittelbar vor und nach einem Pilotsymbol. Als ein Ergebnis ist
es möglich,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Phase, der Amplitudenverzerrung und der Frequenzverschiebung auf
der I-Q-Ebene zu unterbinden und die Verschlechterung der Fehlerrate
zu unterbinden.
-
Bei
der vorliegenden Erfindung beinhaltet das Verfahren für das Unterscheiden
des Modulationstyps für
das Modulieren der Pilotsymbole von dem Modulationstyp für das Modulieren
der Symbole unmittelbar vor und nach einem Pilotsymbol zum Beispiel
ein Verfahren, zwei oder mehr Signalpunkte von jedem einzelnen Symbol
unmittelbar vor und nach einem Pilotsymbol auf einer fiktiven Linie
anzuordnen, die den Pilotsymbol-Signalpunkt und den Ausgangspunkt
auf der In-Phase-I-Quadratur-Q-Ebene verbindet. In diesem Fall ist es
wünschenswert,
einen Modulationstyp mit weniger Mehrwerts als dem Pilotsymbol-Modulationstyp mit
8 oder mehr Werten für
Symbole unmittelbar vor und nach dem Pilotsymbol zu verwenden.
-
Die
digitale drahtlose Kommunikationsvorrichtung der vorliegenden Erfindung
weist sowohl die Konfiguration auf der Senderseite, die in 4 gezeigt
wird, als auch die Konfiguration auf der Empfängerseite auf, die in 5 gezeigt
wird. Die Konfigurationen in 4 und 5 sind
nur Beispiele und die vorliegende Erfindung ist nicht nur auf diese
Beispiele beschränkt.
-
(Ausführungsform
2)
-
7 zeigt
ein Signal-Raumdiagramm auf der In-Phase-I-Quadratur-Q-Ebene gemäß einem 16APSK-Modulationstyp,
welcher ein Beispiel eines Mehrwert-Modulationstyps mit 8 oder mehr
Werten ist, der Pilotsymbol-Signalpunkte und Signalpunkte von einem
Symbol vor und nach den Pilotsymbolen anzeigt. In 7 bezeichnen
die Bezugszeichen 401 Signalpunkte gemäß dem 16APSK-Modulationstyp,
Bezugszeichen 402 bezeichnet den Pilotsymbol-Signalpunkt und die
Bezugszeichen 403 bezeichnen die Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol. Weiterhin
ist Bezugszeichen 404 eine fiktive Linie, die den Pilotsymbol-Signalpunkt
und den Ausgangspunkt auf der I-Q-Ebene verbindet, und zwei oder mehr
Signalpunkte 403 von jedem einzelnen Symbol unmittelbar
vor und nach dem Pilotsymbol sind auf der fiktiven Linie 404 angeordnet,
die den Pilotsymbol-Signalpunkt 402 und den Ausgangspunkt
verbindet.
-
8 zeigt
ein Beispiel für
eine Frame-Konfiguration von Symbolen und Pilotsymbolen, die gemäß dem 16APSK-Modulationstyp
moduliert sind. Bezugszeichen 301 bezeichnet ein Symbol
unmittelbar vor einem Pilotsymbol und Bezugszeichen 302 bezeichnet
ein Symbol unmittelbar nach dem Pilotsymbol. Zu diesem Zeitpunkt
werden 2 oder mehr Signalpunkte von einem Symbol 301 unmittelbar
vor dem Pilotsymbol und ein Symbol 302 unmittelbar nach
dem Pilotsymbol auf der fiktiven Linie 404 angeordnet,
die den Pilotsymbol-Signalpunkt 402 und
den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene verbindet.
-
Wenn
die Übertragungsdaten
ein digitales Signal sind, das gemäß dem Modulationstyp moduliert
wird, der in 7 und 8 gezeigt
wird, selbst wenn die Symbol-Synchronisation nicht vollständig aufgebaut
ist, geht das Pilotsymbol auf die fiktive Linie über, die das Pilotsymbol und
den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene verbindet,
und deshalb zeigt die vorliegende Ausführungsform die Wirkungen, die
in 6B und 6C gezeigt
werden, was es ermöglicht,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol zu unterbinden. Dies verbessert die Bit-Fehlerraten-Kennlinie
bei dem Träger/Rauschabstand
während
der Ermittlung eines Empfangssignals.
-
Nebenbei
sind die Orte des Pilotsymbol-Signalpunkts und der Signalpunkte
von jedem einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol
auf der In-Phase-I-Quadratur-Q-Ebene
nicht auf 7 beschränkt. Die Frame-Konfiguration
ist auch nicht auf 8 beschränkt. Die vorliegende Ausführungsform
erklärt
den Fall, bei welchem der Mehrwert-Modulationstyp mit 8 oder mehr Werten
ein 16APSK-Modulatinstyp ist, wobei der Mehrwert-Modulationstyp mit 8 oder mehr Werten
aber nicht auf diesen beschränkt
ist.
-
Wie
oben gezeigt, ordnet die digitale drahtlose Kommunikationsvorrichtung
nach der Ausführungsform 2
Signalpunkte von jedem einzelnen Symbol unmittelbar vor und nach
dem Pilotsymbol auf einer fiktiven Linie an, die den Ausgangspunkt
und den Pilotsymbol-Signalpunkt
auf der In-Phase-Quadratur-Ebene in einer Frame-Konfiguration verbindet,
in welcher ein Pilotsymbol für
je 3 Symbole gemäß dem Modulationstyp
eingefügt ist,
wobei sie einen Mehrwert-Modulationstyp mit 8 oder mehr Werten beinhaltet,
und auf diese Weise kann sie die Verschlechterung der Genauigkeit
bei dem Abschätzen
der Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol bei der quasi-kohärenten Ermittlung der Symbole
unterbinden, deren Symbolsynchronisation nicht vollständig aufgebaut
ist, wobei die Bit-Fehlerraten-Kennlinie für den Störabstand verbessert wird.
-
(Ausführungsform
3)
-
9 zeigt
ein Signal-Raumdiagramm gemäß einem
Mehrwert-Quadratur-Amplitudenmodulations-System
(QAM) mit 8 oder mehr Werten auf einer In-Phase-I-Quadratur-Q-Ebene
und zeigt den Pilotsymbol-Signalpunkt und Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol. In 9 bezeichnen
die Bezugszeichen 501 die Signalpunkte gemäß dem Mehrwert-QAM-System,
Bezugszeichen 502 bezeichnet einen Pilotsymbol-Signalpunkt
und die Bezugszeichen 503 bezeichnen Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol. Bezugszeichen 504 ist
eine fiktive Linie, die den Pilotsymbol-Signalpunkt und den Ausgangspunkt
der I-Q-Ebene verbindet. Zwei oder mehr Signalpunkte 503 von
jedem einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol
sind auf der fiktiven Linie 504 angeordnet, die den Pilotsymbol-Signalpunkt 502 und
den Ausgangspunkt verbindet.
-
10 zeigt
ein Beispiel einner Frame-Konfiguration von Symbolen und Pilotsymbolen,
die gemäß dem Mehrwert-QAM-System
mit 8 oder mehr Werten moduliert sind. Bezugszeichen 301 bezeichnet
ein Symbol unmittelbar vor dem Pilotsymbol und Bezugszeichen 302 bezeichnet
ein Symbol unmittelbar nach dem Pilotsymbol. Zu diesem Zeitpunkt
werden zwei oder mehr Symbole 301 unmittelbar vor dem Pilotsymbol
und Symbole 302 unmittelbar nach dem Pilotsymbol auf der
fiktiven Linie 504 angeordnet, die den Pilotsymbol-Signalpunkt 502 und
den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene verbindet.
-
Sobald
das digitale Signal ermittelt ist, das gemäß solch einem Modulationstyp
moduliert wurde, selbst wenn die Symbolsynchronisation nicht vollständig wie
in dem Fall der obigen Ausführungsform
aufgebaut ist, geht das Pilotsymbol auf die fiktiven Linie über, die
das Pilotsymbol und den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene
verbindet, und deshalb zeigt die vorliegende Ausführungsform
die Wirkungen, die in 6B und 6C gezeigt
werden, was es ermöglicht,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol zu unterbinden. Dies verbessert die Bit-Fehlerraten-Kennlinie
bei dem Störabstand
während
der Ermittlung des Empfangssignals.
-
Die
Orte des Pilotsymbol-Signalpunkts und der Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol sind nicht
auf 9 beschränkt.
Darüber
hinaus ist die Frame-Konfiguration nicht auf 10 beschränkt.
-
Wie
oben gezeigt, ordnet die digitale drahtlose Kommunikationsvorrichtung
nach der Ausführungsform 3
zwei oder mehr Signalpunkte von jedem einzelnen Symbol unmittelbar
vor und nach dem Pilotsymbol auf einer fiktiven Linie in einer Frame-Konfiguration
an, die den Ausgangspunkt und den Pilotsymbol-Signalpunkt auf der
In-Phase-I-Quadratur-Q-Ebene verbindet, in welcher ein Pilotsymbol
für je
3 Symbole oder mehr gemäß dem Modulationstyp
eingefügt
ist, der die Mehrwert-QAM-Modulationssyteme mit 8 oder mehr Werten
beinhaltet, und auf diese Weise kann es die Verschlechterung der
Genauigkeit bei dem Abschätzen
der Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol bei der quasi-kohärenten Ermittlung der Symbole
unterbinden, deren Symbolsynchronisation nicht vollständig aufgebaut
ist, wobei die Bit-Fehlerraten-Kennlinie für den Störabstand verbessert wird.
-
(Ausführungsform
4)
-
11 zeigt
ein Signal-Raumdiagramm gemäß einem
16QAM-System auf einer In-Phase-I-Quadratur-Q-Ebene und zeigt einen Pilotsymbol-Signalpunkt
und Signalpunkte von jedem einzelnen Symbol unmittelbar vor und
nach dem Pilotsymbol. In 11 bezeichnen
die Bezugszeichen 601 Signalpunkte gemäß dem 16QAM-System, Bezugszeichen 602 bezeichnet
den Pilotsymbol-Signalpunkt und die Bezugszeichen 603 bezeichnen
Signalpunkte von jedem einzelnen Symbol unmittelbar vor und nach
dem Pilotsymbol. Bezugszeichen 604 ist eine fiktive Linie,
die den Pilotsymbol-Signalpunkt und den Ausgangspunkt auf der I-Q-Ebene verbindet.
Zwei oder mehr Signalpunkte 603 von jedem einzelnen Symbol
unmittelbar vor und nach dem Pilotsymbol sind auf der fiktiven Linie 604 angeordnet,
die den Pilotsymbol-Signalpunkt 602 und den Ausgangspunkt
verbindet.
-
12 zeigt
ein Beispiel einer Frame-Konfiguration von Symbolen, die gemäß dem 64QAM-System moduliert
sind und Pilotsymbole. Bezugszeichen 301 bezeichnet ein
Symbol unmittelbar vor dem Pilotsymbol und Bezugszeichen 302 bezeichnet
ein Symbol unmittelbar nach dem Pilotsymbol. Zu diesem Zeitpunkt
werden zwei oder mehr Symbole 603 von einem Symbol 301 unmittelbar
vor dem Pilotsymbol und einem Symbol 302 unmittelbar nach
dem Pilotsymbol auf der fiktiven Linie 604 angeordnet,
die den Pilotsymbol-Signalpunkt 602 und den Ausgangspunkt
auf der In-Phase-I-Quadratur-Q-Ebene verbindet.
-
Sobald
das digitale Signal ermittelt ist, das gemäß solch einem Modulationstyp
moduliert wurde, selbst wenn die Symbolsynchronisation nicht vollständig wie
in dem Fall der obigen Ausführungsform
aufgebaut ist, geht das Pilotsymbol auf die fiktive Linie über, die
das Pilotsymbol und den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene
verbindet, und deshalb zeigt die vorliegende Ausführungsform
die Wirkungen, die in 6B und 6C gezeigt
werden, was es ermöglicht,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol zu unterbinden. Dies verbessert die Bit-Fehlerraten-Kennlinie
bei dem Störabstand
während
der Ermittlung des Empfangssignals.
-
Die
Orte des Pilotsymbol-Signalpunkts und der Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol auf der
In-Phase-I-Quadratur-Q-Ebene sind nicht auf 11 beschränkt. Darüber hinaus
ist die Frame-Konfiguration nicht auf 12 beschränkt.
-
13 zeigt
ein anderes Beispiel eines Signal-Raumdiagramms gemäß dem 64QAM-System auf der In-Phase-I-Quadratur-Q-Ebene
und zeigt einen Pilotsymbol-Signalpunkt und Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol. In 13 bezeichnen
die Bezugszeichen 701 und 701-A Signalpunkte gemäß dem 64QAM-System, die Bezugszeichen 701-A bezeichnen
Signalpunkte von jedem einzelnen Symbol unmittelbar vor und nach
dem Pilotsymbol, Bezugszeichen 702 bezeichnet einen Pilotsym bol-Signalpunkt
und Bezugszeichen 703 bezeichnet eine fiktive Linie, die
den Pilotsymbol-Signalpunkt
und den Ausgangspunkt auf der I-Q-Ebene verbindet.
-
Wenn
der Signalpunkt mit der maximalen Signalpunkt-Leistung der Signalpunkte
auf der Grundlage von 64QAM als der Pilotsymbol-Signalpunkt 702 bezeichnet
wird und Signalpunkte 701-A auf der fiktiven Linie 703,
welche diese und den Ausgangspunkt verbindet, als die Signalpunkte
des Symbols 301 unmittelbar vor dem Pilotsymbol und dem
Signalpunkt eines Symbols 302 unmittelbar nach dem Pilotsymbol
bezeichnet werden, geht das Pilotsymbol auf die fiktive Linie über, die
das Pilotsymbol und den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene verbindet,
selbst wenn die Symbolsynchronisation nicht vollständig aufgebaut
ist, und deshalb ist es möglich,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol zu unterbinden. Dies ermöglicht es, die Bit-Fehlerraten-Kennlinie
bei dem Störabstand,
wahrend der Ermittlung des Empfangssignals zu verbessern. Darüber hinaus
weist dieser Fall den Vorteil auf, da es möglich ist, ein Symbol 301 unmittelbar
vor dem Pilotsymbol und ein Symbol 302 unmittelbar nach
dem Pilotsymbol zu beurteilen, wobei ein Beurteilungsverfahren auf
der Grundlage von 64QAM verwendet wird.
-
In 13 wird
Bezugszeichen 702 als der Pilotsymbol-Signalpunkt verwendet,
wobei der Pilotsymbol-Signalpunkt aber nicht darauf beschränkt ist
und er kann jeder Signalpunkt sein, wenn der Signalpunkt die maximale
Signalpunkt-Leistung der Signalpunkte auf der Grundlage von 64QAM
aufweist.
-
14 zeigt
ein weiteres Beispiel eines Signal-Raumdiagramms auf der Grundlage
von 64QAM auf der In-Phase-1-Quadratur-Q-Ebene und zeigt einen Pilotsymbol-Signalpunkt
und Signalpunkte von jedem einzelnen Symbol unmittelbar vor und
nach dem Pilotsymbol. In 14 bezeichnen
die Bezugszeichen 801 Signalpunkte auf der Grundlage von
64QAM, Bezugszeichen 802 bezeichnet einen Pilotsymbol-Signalpunkt,
und die Bezugszeichen 803 bezeichnen Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol.
-
Die
Signalpunkte 801 sind Signalpunkte auf der Grundlage von
64QAM auf der In-Phase-I-Quadratur-Q-Ebene,
und wenn die maximale Signalpunkt-Leistung der Signalpunkte auf
der Grundlage von 64QAM r2 ist und die Signalpunkt-Leistung
des Pilotsymbols R2 ist, dann ist die Beziehung
zwischen diesen beiden R2 = r2.
Wenn die Schnittpunkte der fiktiven Linie oder der I-Achse, die
den Pilotsymbol-Signalpunkt 802, der auf der I-Achse angeordnet
ist, und den Ausgangspunkt verbinden, und die fiktive Linie, die
von dem Signalpunkt 801 auf der Grundlage von QAM senkrecht
zu der I-Achse gezogen ist, als Signalpunkte des Symbols 301 unmittelbar
vor dem Pilotsymbol und ein Symbol 302 unmittelbar nach
dem Pilotsymbol bezeichnet werden, geht das Pilotsymbol auf die
fiktive Linie über,
die das Pilotsymbol und den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene
verbindet, selbst wenn die Symbolsynchronisation nicht vollständig aufgebaut
ist, und deshalb zeigt die vorliegende Ausführungsform die Wirkungen, die
in 6B und 6C gezeigt
werden, was es ermöglicht,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol zu unterbinden. Dies verbessert die Bit-Fehlerraten-Kennlinie bei
dem Störabstand
während
der Ermittlung des Empfangssignals.
-
Weiterhin
weist diese Konfiguration einen Vorteil auf, da es möglich ist,
ein Symbol 301 unmittelbar vor dem Pilotsymbol und ein
Symbol 302 unmittelbar nach dem Pilotsymbol zu beurteilen,
wobei ein Beurteilungsverfahren auf der Grundlage von 64QAM verwendet
wird.
-
Nebenbei
wird in 14 R2 =
r2 angenommen, wobei diese Beschränkung aber
nicht festgelegt ist. Darüber
hinaus kann ein Pilotsymbol-Signalpunkt, der auf der I-Achse angeordnet
werden soll, jeder Signalpunkt mit Ausnahme Signalpunkts 802 sein.
-
Wie
oben gezeigt, ordnet die digitale drahtlose Kommunikationsvorrichtung
nach der Ausführungsform 4 zwei
oder mehr Signalpunkte von jedem einzelnen Symbol unmittelbar vor
und nach dem Pilotsymbol auf einer fiktiven Linie in dem Modulationstyp
an, der das 64QAM-System beinhaltet, die den Ausgangspunkt und den
Pilotsymbol-Signalpunkt auf der In-Phase-Quadratur-Ebene verbindet,
und auf diese Weise kann sie die Verschlechterung der Genauigkeit
bei dem Abschätzen
der Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol bei der quasi-kohärenten Ermittlung der Symbole
unterbinden, deren Symbolsynchronisation nicht vollständig aufgebaut
ist, wobei die Bit-Fehlerraten-Kennlinie
für den
Störabstand
verbessert wird.
-
(Ausführungsform
5)
-
15 zeigt
ein Signal-Raumdiagramm gemäß einem
34QAM-System auf der In-Phase-I-Quadratur-Q-Ebene
und zeigt einen Pilotsymbol-Signalpunkt und Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol.
-
In 15 bezeichnen
die Bezugszeichen 901 Signalpunkte gemäß dem 32QAM-System, Bezugszeichen 902 bezeichnet
einen Pilotsymbol-Signalpunkt und die Bezugszeichen 903 bezeichnen
Signalpunkte von jedem einzelnen Symbol unmittelbar vor und nach
dem Pilotsymbol. Bezugszeichen 904 ist eine fiktive Linie, die
den Pilotsymbol-Signalpunkt und den Ausgangspunkt auf der I-Q-Ebene
verbindet. Zwei oder mehr Signalpunkte 903 von jedem einzelnen
Symbol unmittelbar vor und nach dem Pilotsymbol sind auf der fiktiven
Linie 904 angeordnet, die den Pilotsymbol-Signalpunkt 902 und
den Ausgangspunkt verbindet.
-
16 zeigt
ein Beispiel einer Frame-Konfiguration von Symbolen auf der Grundlage
von 32QAM und von Pilotsymbolen. Bezugszeichen 301 bezeichnet
ein Symbol unmittelbar vor dem Pilotsymbol und Bezugszeichen 302 bezeichnet
ein Symbol unmittelbar nach dem Pilotsymbol.
-
Zu
diesem Zeitpunkt werden, wie in 16 gezeigt,
zwei oder mehr Signalpunkte von einem Symbol 301 unmittelbar
vor dem Pilotsymbol und einem Symbol 302 unmittelbar nach
dem Pilotsymbol auf der fiktiven Linie 904 angeordnet,
die den Pilotsymbol-Signalpunkt 902 und den Ausgangspunkt
auf der In-Phase-I-Quadratur-Q-Ebene verbindet.
-
Selbst
wenn die Symbolsynchronisation nicht vollständig aufgebaut ist, geht in
der Ausführungsform 5,
wie im dem Fall der obigen Ausführungsform,
das Pilotsymbol auf die fiktive Linie über, die das Pilotsymbol und
den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene verbindet, und deshalb zeigt die
vorliegende Ausführungsform
die Wirkungen, die in 6B und 6C gezeigt
werden, was es ermöglicht,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol zu unterbinden. Dies verbessert die Bit-Fehlerraten-Kennlinie
bei dem Störabstand
während
der Ermittlung des Empfangssignals.
-
Die
Orte des Pilotsymbol-Signalpunkts und der Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol auf der
In-Phase-I-Quadratur-Q-Ebene sind nicht auf 15 beschränkt. Darüber hinaus
ist die Frame-Konfiguration nicht auf 16 beschränkt.
-
Wie
oben gezeigt, ordnet die digitale drahtlose Kommunikationsvorrichtung
nach der Ausführungsform 5
zwei oder mehr Signalpunkte von jedem einzelnen Symbol unmittelbar
vor und nach dem Pilotsymbol auf einer fiktiven Linie an, die den
Ausgangspunkt und den Pilotsymbol-Signalpunkt auf der In-Phase-Quadratur-Ebene
verbindet, und auf diese Weise kann sie die Verschlechterung der
Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol bei der quasi-kohärenten Ermittlung der Symbole
unterbinden, deren Symbolsynchronisation nicht vollständig aufgebaut
ist, wobei die Bit-Fehlerraten-Kennlinie für den Störabstand verbessert wird.
-
(Ausführungsform
6)
-
17 ist
ein Signal-Raumdiagramm auf der Grundlage von 16QAM auf der In-Phase-I-Quadratur-Q-Ebene
und zeigt einen Pilotsymbol-Signalpunkt und Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol. In 17 bezeichnen
die Bezugszeichen 1001 Signalpunkte auf der Grundlage von
64QAM, Bezugszeichen 1002 bezeichnet einen Pilotsymbol-Signalpunkt
und die Bezugszeichen 1003 bezeichnen Signalpunkte von
jedem einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol. Bezugszeichen 1004 ist
eine fiktive Linie, die den Pilotsymbol-Signalpunkt und den Ausgangspunkt
auf der I-Q-Ebene verbindet. Zwei oder mehr Signalpunkte 1003 von
jedem einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol
sind auf der fiktiven Linie 1004 angeordnet, die den Pilotsymbol-Signalpunkt 1002 und den
Ausgangspunkt verbindet.
-
18 zeigt
ein Beispiel einer Frame-Konfiguration von Symbolen auf der Grundlage
von 64QAM und das Pilotsymbol. Bezugszeichen 301 bezeichnet
ein Symbol unmittelbar vor dem Pilotsymbol und Bezugszeichen 302 bezeichnet
ein Symbol unmittelbar nach dem Pilotsymbol. Zu diesem Zeitpunkt
werden zwei oder mehr Symbolpunkte von einem Symbol 301 unmittelbar
vor dem Pilotsymbol und ein Symbol 302 unmittelbar nach
dem Pilotsymbol auf der fiktiven Linie 1004 angeordnet,
die den Pilotsymbol-Signalpunkt 1002 und den Ausgangspunkt
auf der In-Phase-I-Quadratur-Q-Ebene verbindet.
-
Selbst
wenn die Symbolsynchronisation nicht vollständig aufgebaut ist, geht in
der Ausführungsform 6,
wie im dem Fall der obigen Ausführungsform,
das Pilotsymbol auf die fiktive Linie über, die das Pilotsymbol und
den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene verbindet, und deshalb ist es
möglich,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Große
der Frequenzverschiebung durch das Pilotsymbol zu unterbinden. Dies
verbessert die Bit-Fehlerraten-Kennlinie bei dem Störabstand
während
der Ermittlung des Empfangssignals.
-
Die
Orte des Pilotsymbol-Signalpunkts und der Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol auf der
In-Phase-I und der Quadratur-Q-Ebene sind nicht auf 17 beschränkt. Darüber hinaus
ist die Frame-Konfiguration nicht auf 18 beschränkt.
-
19 zeigt
ein anderes Beispiel eines Signal-Raumdiagramms des 16QAM-Systems
auf der In-Phase-I-Quadratur-Q-Ebene und zeigt einen Pilotsymbol-Signalpunkt
und Signalpunkte von jedem einzelnen Symbol unmittelbar vor und
nach dem Pilotsymbol. In 19 bezeichnen
die Bezugszeichen 1101 und 1101-A Signalpunkte
auf der Grundlage von 16QAM, die Bezugszeichen 1101-A bezeichnen
Signalpunkte von jedem einzelnen Symbol unmittelbar vor und nach
dem Pilotsymbol, Bezugszeichen 1102 bezeichnet den Pilotsymbol-Signalpunkt
und Bezugszeichen 1103 bezeichnet eine fiktive Linie, die
den Pilotsymbol-Signalpunkt
mit dem Ausgangspunkt verbindet.
-
Wenn
der Signalpunkt mit der maximalen Signalpunkt-Leistung der Signalpunkte
auf der Grundlage von 16QAM als der Pilotsymbol-Signalpunkt 1102 bezeichnet
wird und die Signalpunkte 1101-A auf der fiktiven Linie 1103,
welche diesen und den Ausgangspunkt verbindet, als die Signalpunkte
des Symbols 301 unmittelbar vor dem Pilotsymbol und eines
Symbols 302 unmittelbar nach dem Pilotsymbol bezeichnet
werden, geht das Pilotsymbol auf die fiktive Linie über, die
das Pilotsymbol und den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene
verbindet, selbst wenn die Symbolsynchronisation nicht vollständig aufgebaut
ist, und deshalb zeigt die vorliegende Ausführungsform die Wirkungen, die
in 6B und 6C gezeigt
werden, und kann die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol unterbinden. Dies ermöglicht es, die Bit-Fehlerraten-Kennlinie
bei dem Störabstand,
während
der Ermittlung des Empfangssignals zu verbessern.
-
Darüber hinaus
weist diese Konfiguration einen Vorteil auf, da es möglich ist,
ein Symbol 301 unmittelbar vor dem Pilotsymbol und ein
Symbol 302 unmittelbar nach dem Pilotsymbol zu beurteilen,
wobei ein Beurteilungsverfahren auf der Grundlage von 16QAM verwendet
wird.
-
In 19 ist
der Signalpunkt 1102 als der Pilotsymbol-Signalpunkt bezeichnet,
wobei der Pilotsymbol-Signalpunkt aber nicht darauf beschränkt ist
und er kann jeder Signalpunkt sein, wenn der Signalpunkt die maximale
Signalpunkt-Leistung der Signalpunkte auf der Grundlage von 64QAM
aufweist.
-
20 zeigt
ein weiteres Beispiel des Signal-Raumdiagramms auf der Grundlage
von 16QAM auf der In-Phase-I-Quadratur-Q-Ebene und zeigt einen Pilotsymbol-Signalpunkt
und Signalpunkte von jedem einzelnen Symbol unmittelbar vor und
nach dem Pilotsymbol. In 20 bezeichnen
die Bezugszeichen 1201 Signalpunkte auf der Grundlage von
16QAM, Bezugszeichen 1202 bezeichnet einen Pilotsymbol-Signalpunkt, und
die Bezugszeichen 1203 bezeichnen Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol.
-
In
diesem Fall, wenn die maximale Signalpunkt-Leistung der Signalpunkte
auf der Grundlage von 16QAM p2 ist und die
Pilotsignal-Signalpunkt-Leistung des Pilotsymbols P2 ist,
nimmt man P2 = p2 an.
Wenn die Schnittpunkte der fiktiven Linie oder der I-Achse, die
den Pilotsymbol-Signalpunkt 1202, der auf der I-Achse angeordnet
ist, und den Ausgangspunkt verbindet, und die fiktive Linie, die
von dem Signalpunkt 1201 auf der Grundlage von QAM senkrecht
zu der I-Achse gezogen ist, als Signalpunkte des Symbols 301 unmittelbar
vor dem Pilotsymbol und einem Symbol 302 unmittelbar nach
dem Symbol bezeichnet werden, geht das Pilotsymbol auf die fiktive
Linie über,
die das Pilotsymbol und den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene
verbindet, selbst wenn die Symbolsynchronisation noch nicht vollständig aufgebaut
ist, und deshalb zeigt die vorliegende Ausführungsform die Wirkungen, die
in 6B und 6C gezeigt
werden, was es ermöglicht,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol zu unterbinden. Dies verbessert die Bit-Fehlerraten-Kennlinie bei dem
Störabstand
während
der Ermittlung des Empfangssignals. Weiterhin weist diese Konfiguration
einen Vorteil auf, da es möglich
ist, ein Symbol 301 unmittelbar vor dem Pilotsymbol und
ein Symbol 302 unmittelbar nach dem Pilotsymbol zu beurteilen,
wobei ein Beurteilungsverfahren auf der Grundlage von 16QAM verwendet
wird.
-
Nebenbei
wird in 20 P2 =
p2 angenommen, wobei diese Beschränkung aber
nicht festgelegt ist. Darüber
hinaus kann ein Pilotsymbol-Signalpunkt, der auf der I-Achse angeordnet
werden soll, jeder Signalpunkt mit Ausnahme Signalpunkts 1202 sein.
-
(Ausführungsform
7)
-
21 ist
ein Signal-Raumdiagramm gemäß einem
QPSK-Modulationstyp auf der In-Phase-I-Quadratur-Q-Ebene
und zeigt einen Pilotsymbol-Signalpunkt und Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol. In 21 bezeichnen
die Bezugszeichen 1301 und 1301-A Signalpunkte
gemäß dem QPSK-Modulationstyp,
die Bezugszeichen 1301-A bezeichnen Signalpunkte von jedem einzelnen
Symbol unmittelbar vor und nach dem Pilotsymbol. Bezugszeichen 1302 ist
eine fiktive Linie, die den Pilotsymbol-Signalpunkt und den Ausgangspunkt
verbindet.
-
22 zeigt
ein Beispiel einer Frame-Konfiguration von QPSK-Modulationssymbolen
und Pilotsymbolen zu der Zeit t. Bezugszeichen 301 bezeichnet
ein Symbol unmittelbar vor dem Pilotsymbol und Bezugszeichen 302 bezeichnet
ein Symbol unmittelbar nach dem Pilotsymbol.
-
21 zeigt
die Orte der Signalpunkte gemäß dem QPSK-Modulationstyp
auf der In-Phase-I-Quadratur-Q-Ebene,
den Pilotsymbol-Signalpunkt und Signalpunkte 1301-A von
jedem einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol.
Zwei Signalpunkte 1301-A von jedem einzelnen Symbol unmittelbar
vor und nach dem Pilotsymbol werden auf der fiktiven Linie 1302 angeordnet,
die den Pilotsymbol-Signalpunkt 1301-A und den Ausgangspunkt
verbindet.
-
22 zeigt
ein Beispiel einer Frame-Konfiguration von QPSK-Modulationssymbolen
und Pilotsymbolen zu der Zeit t. Bezugszeichen 301 bezeichnet
ein Symbol unmittelbar vor dem Pilotsymbol und Bezugszeichen 302 bezeichnet
ein Symbol unmittelbar nach dem Pilotsymbol.
-
Zu
diesem Zeitpunkt werden zwei Signalpunkte eines Symbols 301 unmittelbar
vor dem Pilotsymbol und eines Symbols 302 unmittelbar nach
dem Pilotsymbol auf der fiktiven Linie 1302 angeordnet,
die den Pilotsymbol-Signalpunkt 1301-A und den Ausgangspunkt
auf der In-Phase-I-Quadratur-Q-Ebene verbindet.
-
Selbst
wenn die Symbol-Synchronisation nicht vollständig aufgebaut ist, geht auf
diese Weise, sobald die Referenz-Phase und die Größe der Frequenzverschiebung
von dem Pilotsymbol abgeschätzt
werden, das Pilotsymbol auf die fiktive Linie über, die das Pilotsymbol und
den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene verbindet,
und deshalb zeigt die vorliegende Ausführungsform die Wirkungen, die
in 6B und 6C gezeigt
werden, was es ermöglicht,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol zu unterbinden. Dies verbessert die Bit-Fehlerraten-Kennlinie
bei dem Störabstand
während
der Ermittlung des Empfangssignals.
-
Die
Orte des Pilotsymbol-Signalpunkts und der Signalpunkte von jedem
einzelnen Pilotsymbol unmittelbar vor und nach dem Pilotsymbol auf
der In-Phase-I und der Quadratur-Q-Ebene sind nicht auf 21 beschränkt. Darüber hinaus
ist die Frame-Konfiguration nicht auf 22 beschränkt.
-
Wie
oben gezeigt, ordnet die digitale drahtlose Kommunikationsvorrichtung
nach der Ausführungsform 7
zwei Signalpunkte von jedem einzelnen Symbol unmittelbar vor und
nach dem Pilotsymbol auf einer fiktiven Linie an, die den Ausgangspunkt
und den Pilotsymbol-Signalpunkt
auf der In-Phase-I-Quadratur-Ebene verbindet, gemäß dem Modulationstyp,
der den QPSK-Modulationstyp beinhaltet, in welchem ein Pilotsymbol
für je
3 oder mehr Symbole eingefügt
ist, und auf diese Weise kann sie die Verschlechterung der Genauigkeit
bei dem Abschätzen
der Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol bei der quasi-kohärenter Ermittlung von Symbolen
unterbinden, deren Symbolsynchronisation nicht vollständig aufgebaut
ist. Dies verbessert die Bit-Fehlerraten-Kennlinie bei dem Störabstand.
-
(Ausführungsform
8)
-
23 ist
ein Signal-Raumdiagramm gemäß einem π/4-Shift-DQPSK
(Differential Quadrature Phase Shift Keying)-Modulationstyp auf
der In-Phase-I-Quadratur-Q-Ebene und zeigt einen Pilotsymbol-Signalpunkt und
Signalpunkte von jedem einzelnen Symbol unmittelbar vor und nach
dem Pilotsymbol. In 23 bezeichnen die Bezugszeichen 1401 und 1401-A Signalpunkte
gemäß einem π/4-Shift-DQPSK-Modulationstyp,
und insbesondere die Bezugszeichen 1401-A bezeichnen Signalpunkte
von jedem einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol.
Bezugszeichen 1402 ist eine fiktive Linie, die den Pilotsymbol-Signalpunkt
mit dem Ausgangspunkt verbindet.
-
24 zeigt
ein Beispiel einer Frame-Konfiguration von π/4-Shift-DQPSK-Modulationssymbolen
und Pilotsymbolen. Bezugszeichen 301 bezeichnet ein Symbol
unmittelbar vor dem Pilotsymbol und Bezugszeichen 302 bezeichnet
ein Symbol unmittelbar nach dem Pilotsymbol.
-
23 zeigt
die Orte der Signalpunkte 1401 und 1401-A gemäß dem π/4-Shift-DQPSK-Modulationstyp auf
der In-Phase-I-Quadratur-Q-Ebene, den Pilotsymbol-Signalpunkt 1401-A und
Signalpunkte 1401-A von jedem einzelnen Symbol unmittelbar
vor und nach dem Pilotsymbol. Zwei Signalpunkte 1401-A von
jedem einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol
sind auf der fiktiven Linie 1402 angeordnet, die den Pilotsymbol-Signalpunkt 1401-A und
den Ausgangspunkt verbindet.
-
24 zeigt
ein Beispiel einer Frame-Konfiguration von π/4-Shift-DQPSK-Modulationssymbolen
und Pilotsymbolen. Bezugszeichen 301 bezeichnet ein Symbol
unmittelbar vor dem Pilotsymbol und Bezugszeichen 302 bezeichnet
ein Symbol unmittelbar nach dem Pilotsymbol.
-
Zu
diesem Zeitpunkt werden zwei Signalpunkte eines Symbols 301 unmittelbar
vor dem Pilotsymbol und eines Symbols 302 unmittelbar nach
dem Pilotsymbol auf der fiktiven Linie 1402 angeordnet,
die den Pilotsymbol-Signalpunkt 1401-A und den Ausgangspunkt
auf der In-Phase-I-Quadratur-Q-Ebene verbindet.
-
Selbst
wenn die Symbol-Synchronisation nicht vollständig aufgebaut ist, geht auf
diese Weise, sobald die Referenz-Phase und die Größe der Frequenzverschiebung
von dem Pilotsymbol abgeschätzt
werden, das Pilotsymbol auf die fiktive Linie über, die das Pilotsymbol und
den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene verbindet,
und deshalb zeigt die vorliegende Ausführungsform die Wirkungen, die
in 6B und 6C gezeigt
werden, was es ermöglicht,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol zu unterbinden. Dies verbessert die Bit-Fehlerraten-Kennlinie
bei dem Störabstand
während
der Ermittlung des Empfangssignals.
-
Die
Orte des Pilotsymbol-Signalpunkts und der Signalpunkte von jedem
einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol auf der
In-Phase-I und der Quadratur-Q-Ebene sind nicht auf 23 beschränkt. Darüber hinaus
ist die Frame-Konfiguration nicht auf 24 beschränkt.
-
Wie
oben gezeigt, ordnet die digitale drahtlose Kommunikationsvorrichtung
nach der Ausführungsform 8
zwei Signalpunkte von jedem einzelnen Symbol unmittelbar vor und
nach dem Pilotsymbol auf einer fiktiven Linie an, die den Ausgangspunkt
und den Pilotsymbol-Signalpunkt
auf der In-Phase-I-Quadratur-Ebene verbindet, gemäß dem π/4-Shift-DQPSK-Modulationstyp, in
welchem ein Pilotsymbol für
je 3 oder mehr Symbole eingefügt
ist, und auf diese Weise kann sie die Verschlechterung der Genauigkeit
bei dem Abschätzen
der Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol beider quasi-kohärenter Ermittlung von Symbolen
unterbinden, deren Symbolsynchronisation nicht vollständig aufgebaut
ist. Dies verbessert die Bit-Fehlerraten-Kennlinie bei dem Störabstand.
-
(Ausführungsform
9)
-
In
einer drahtlosen Kommunikationsvorrichtung ist eine der Funktionen,
die eine große
Quantität
an Leistung verbraucht, ein Leistungsverstärker. 25 zeigt
einen Pfad der I-Komponente
und der Q-Komponente eines 16QAM-Quadratur-Basisband-Signals auf
der I-Q-Ebene. Wenn
man annimmt, dass das In-Phase-Signal I und das Quadratur-Signal
Q ist, wird zu diesem Zeitpunkt der verfügbare Leistungsverstärker dann durch
den maximalen Wert von I2 + Q2,
max (I2 + Q2) und
den Durchschnittswert ⌀(I2 + Q2) bestimmt.
-
26 ist
ein Diagramm, das einen Eingangs/Ausgangs-Kennwert des Leistungsverstärkers zeigt.
In 26 bezeichnet Bezugszeichen 1501 eine
Kennlinie eines Leistungsverstärkers mit
der großen
Ausgangsleistung, Bezugszeichen 1502 bezeichnet eine Kennlinie
eines Leistungsverstärkers
mit der geringen Ausgangsleistung, Bezugszeichen 1503 bezeichnet
die durchschnittliche Ausgangsleistung, Bezugszeichen 1504 bezeichnet
einen Modulationstyp mit einer geringen Variation von I2 +
Q2 und Bezugszeichen 1505 bezeichnet einen
Modulationstyp mit einer großen
Variation von I2 + Q2.
-
Sobald
die durchschnittliche Ausgangsleistung durch Bezugszeichen 1503 bezeichnet
wird, ist zu diesem Zeitpunkt ist die Verstärkung unter Verwendung des
Leistungsverstärkers
mit dem Kennwert des Bezugszeichens 1502 gemäß dem Modulationstyp
des Bezugszeichens 1504 möglich, wohingegen die Verstärkung unter
Verwendung des Leistungsverstärkers
mit dem Kennwert des Bezugszeichens 1502 gemäß dem Modulationstyp
des Bezugszeichens 1505 nicht möglich ist. Deshalb sollte der
Leistungsverstärker
mit dem Kennwert des Bezugszeichens 1501 verwendet werden.
-
Zu
diesem Zeitpunkt weist der Leistungsverstärker mit dem Kennwert des Bezugszeichens 1501 eine höhere Leistungsaufnahme
auf als der Leistungsverstärker
mit dem Kennwert des Bezugszeichens 1502. Auf diese Weise
kann der Modulationstyp mit einem geringeren Maximalwert I2 + Q2, max (I2 + Q2) den Leistungsverstärker mit
der geringeren Leistungsaufnahme verwenden. Sobald er auf den Ort
des Pilotsymbol-Signalpunkts auf der I-Q-Ebene fokussiert ist, verbessert sich
deshalb die Bit-Fehlerrate, je größer der Abstand von dem Ausgangspunkt
ist, um so starker die Störbeständigkeit
des Pilotsymbols ist, welche die Empfängerseite aufweist.
-
Sobald
er jedoch auf den Leistungsverstärker
in dem Sender fokussiert ist, ist es nicht wünschenswert, dass der Maximalwert
von I2 + Q2, max
(I2 + Q2) durch
das Erhöhen
des Pilotsymbols erhöht
wird.
-
Deshalb
erhöht
die vorliegende Ausführungsform
den Abstand des Pilotsymbols von dem Ausgangspunkt, ohne den Maximalwert
von I2 + Q2, max
(I2 + Q2) auf der
I-Q-Ebene zu erhöhen.
Dieses ermöglicht
es, die Bit-Fehlerrate in dem Empfänger zu verbessern, ohne die
Leistungsaufnahme des Leistungsverstärkers des Senders zu erhöhen.
-
Nun
wird das Verfahren der Verbesserung der Bit-Fehlerrate in dem Empfänger ohne
die Erhöhung der
Leistungsaufnahme des Leistungsverstärkers des Senders in der vorliegen den
Ausführungsform
erklärt, wobei
als ein Beispiel der Fall genommen wird, indem ein 16QAM-System
als der Modulationstyp verwendet wird. In 25 kommt
der Maximalwert I2 + Q2,
max (I2 + Q2) gemäß dem 16QAM-System
in die Position, die durch Bezugszeichen 1601 auf seinem
Weg von dem Signalpunkt A zu dem Signalpunkt A bezeichnet ist.
-
Selbst
wenn, wie in 25 gezeigt, der Abstand des
Pilotsymbol-Signalpunkts von dem Ausgangspunkt auf der I-Q-Ebene
mehr als die maximale Amplitude bei den Signalpunkten in dem 16QAM-System
erhöht
wird, ist es gemäß 17 und 18 durch
die Beziehung zwischen dem Pilotsymbol-Signalpunkt, den Signalpunkten 301 und 302 von
jedem einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol
möglich, diesen
Abstand geringer als den Maximalwert I2 +
Q2, max (I2 + Q2) in dem 16QAM-System zu halten. Dies ermöglicht es,
die Bit-Fehlerrate in dem Sender zu verbessern, ohne die Leistungsaufnahme
des Leistungsverstärkers
des Senders zu erhöhen,
indem die Amplitude an dem Pilotsymbol-Signalpunkt auf der I-Q-Ebene mehr als
die maximale Amplitude bei den Signalpunkten in dem 16QAM-System
erhöht
wird.
-
Man
nehme an, dass die Amplitude an dem Pilotsymbol-Signalpunkt größer ist
als die maximale Amplitude an den Mehrwert-Modulations-Signalpunkten
auf der I-Q-Ebene. Weiterhin ist es möglich, die Genauigkeit bei
dem Abschätzen
der Größe der Amplititudenverzerrung
und der Größe der Frequenzverschiebung auf
der Empfängerseite
zu verbessern, weil die Amplitude an dem Pilotsymbol-Signalpunkt
erhöht
wird. Als ein Ergebnis ist es möglich,
die Bit-Fehlerrate-Kennlinie zu verbessern.
-
Nun
werden die Wirkungen der vorliegenden Ausführungsform im Einzelnen unter
Bezug auf 9 und 10 erklärt.
-
Wie
in 9 gezeigt, wird das Mehrwert-QAM-Signal-Raumdiagramm
auf der In-Phase-I-Quadratur-Q-Ebene
in der nachstehenden Gleichung 1 angegeben: IQAM = r (2m-1a1 + 2m-2a2 + ... + 20am)
QQAM = r
(2m-1b1 + 2m-2b2 + ... + 20 m) (1) wobei die
angenommenen Signalpunkte gemäß dem Mehrwert-QAM-System
als (IQAM, QQAM) ausgedrückt sind,
m eine ganze Zahl ist, (a1, b1), (a2, b2), ..., (am, bm) Binärcodes von
1, –1
sind und r eine Konstante ist.
-
Zwei
oder mehr Signalpunkte 503 von jedem einzelnen Symbol unmittelbar
vor und nach dem Pilotsymbol sind auf der fiktiven Linie 504 angeordnet,
die den Pilotsymbol-Signalpunkt 502 und den Ausgangspunkt
verbindet. Wie in 10 gezeigt, sind zwei oder mehr
Symbolpunkte von einem Symbol 301 unmittelbar vor dem Pilotsymbol
und von einem ein Symbol 302 unmittelbar nach dem Pilotsymbol
auf der fiktiven Linie 504 angeordnet, die den Pilotsymbol-Signalpunkt 502 und
den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene verbindet. Selbst wenn die Symbol-Synchronisation
nicht vollständig
aufgebaut ist, geht auf diese Weise das Pilotsymbol auf eine gerade
Linie über,
die das Pilotsymbol und den Ausgangspunkt auf der In-Phase-I-Quadratur-Q-Ebene
verbindet, und deshalb ist es möglich,
die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol zu unterbinden. Dies verbessert die Bit-Fehlerraten-Kennlinie
bei dem Störabstand
während
der Ermittlung des Empfangssignals.
-
Wenn
ein Maximalwert der Mehrwert-QAM-Signalpunkt-Leistung auf der In-Phase-I-Quadratur-Q-Ebene
a ist und die Pilotsymbol-Signalpunkt-Leistung auf der In-Phase-I-Quadratur-Q-Ebene
b ist, ermöglicht
es das Beibehalten von b > a,
ferner die Genauigkeit bei dem Abschätzen der Amplitudenverzerrung durch
den Amplitudenverzerrungs-Abschnitt und die Genauigkeit bei dem
Abschätzen
der Größe der Frequenzverschiebung
durch den Frequenzverschiebungs-Abschnitt auf der Empfängerseite
zu verbessern, ohne die Leistungs-Effizienz des Leistungsverstärkers auf
der Senderseite zu verschlechtern, wie oben beschrieben wurde. Dies
verbessert die Bit-Fehlerraten-Kennlinie bei dem Störabstand
während
der Ermittlung des Empfangssignals.
-
Nebenbei
sind die Orte des Pilotsymbol-Signalpunkts und der Signalpunkte
von jedem einzelnen Symbol unmittelbar vor und nach dem Pilotsymbol
auf der In-Phase-I-Quadratur-Q-Ebene
nicht auf 9 beschränkt, sondern es werden besonders
dann größere Wirkungen
erzielt, sobald der Pilotsymbol-Signalpunkt auf der Achse angeordnet
ist. Die Frame-Konfiguration
ist nicht auf 10 beschränkt.
-
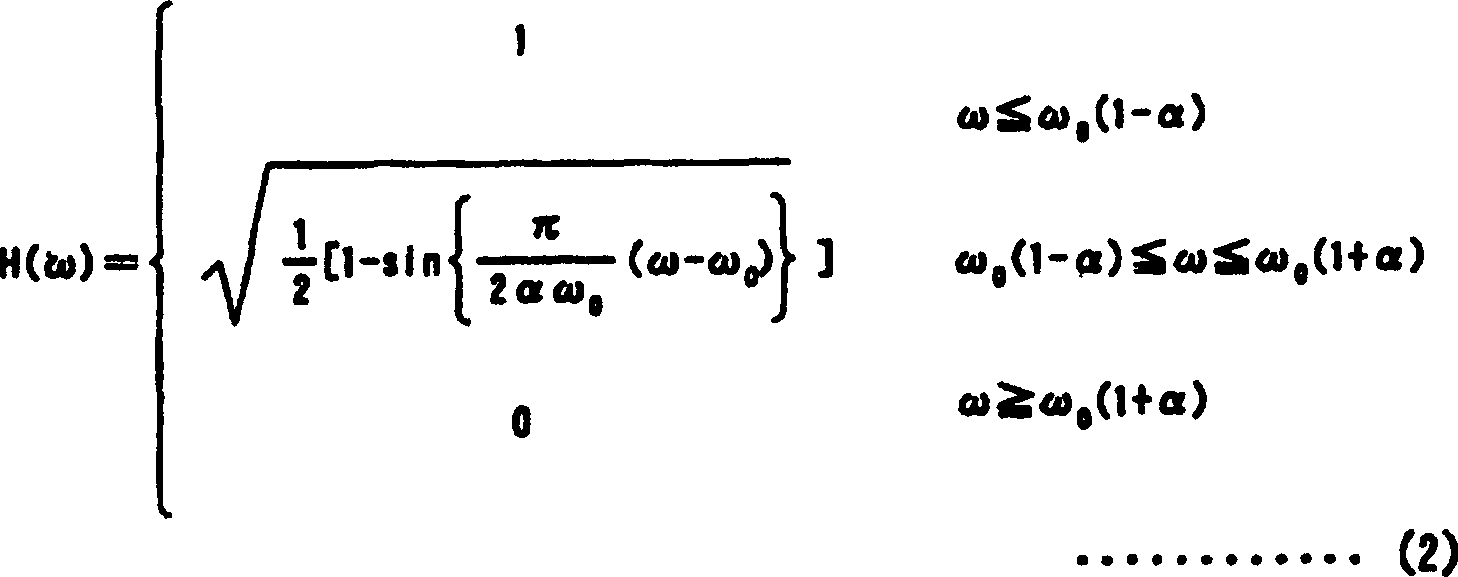
Sobald
die Frequenzeigenschaft des Strecken-Dämpfungsfilters, welcher ein
Bandbegrenzungsfilter ist, wie in der Gleichung 2 nachstehend gezeigt
ist, kann ferner die Änderung
des Dämpfungsfaktors
von 0,1 auf 0,4 und das Einstellen der Signalpunkt-Amplitude des
Pilotsymbols auf eine Wert größer als
das 1,0-fache und kleiner als 1,6-fache der maximalen Signalpunkt-Amplitude
gemäß dem Mehrwert-QAM-System
die Genauigkeit bei dem Abschätzen
der Größe der Frequenzverschiebung
und der Größe der Amplitudenverzerrung verbessern,
sobald die quasi-kohärente
Ermittlung ausgeführt
wird. Dies ergibt eine größere Wirkung
bei der Verbesserung der Bit-Fehlerraten-Kennlinie bei dem Störabstand.
In der Gleichung 2 ist ω die
Frequenz als Bogenmaß, α ist ein
Dämpfungsfaktor, ω 0 ist die
Nyquist-Frequenz als Bogenmaß und
H (ω) ist
die Amplitudeneigenschaft des Dämpfungsfilters.
-
-
Die
vorliegende Ausführungsform
erklärt
das Mehrwert-QAM-System als ein Beispiel eines Mehrwert-Modulationstyps
mit 8 oder mehr Werten, wobei der Mehrwert-Modulationstyp mit 8
oder mehr Werten aber nicht darauf beschränkt ist. Darüber hinaus
können
ein 64QAM-System,
ein 32QAM-System, ein 16QAM-System, ein 8PSK-Modulationstyp und
ein QPSK-Modulationstyp
ebenfalls Wirkungen ähnlich
denen des Mehrwert-QAM-Systems erzeugen.
-
Wie
oben gezeigt, ordnet die digitale drahtlose Kommunikationsvorrichtung
nach der Ausführungsform 9
zwei oder mehr Signalpunkte von jedem einzelnen Symbol unmittelbar
vor und nach dem Pilotsymbol auf einer fiktiven Linie in dem Mehrwert-Modulationstyp
mit 8 oder mehr Werten an, die den Ausgangspunkt und den Pilotsymbol-Signalpunkt
auf der in- Phase-Quadratur-Ebene
verbindet, in welchen ein Pilotsymbol für je 3 oder mehr Symbole eingefügt ist und
erhöht
die Amplitude an dem Pilotsymbol-Signalpunkt mehr als die maximale
Amplitude an Signalpunkten gemäß dem Mehrwert-Modulationstyp
mit 8 oder mehr Werten. Auf diese Weise ist es möglich, die Verschlechterung
der Genauigkeit bei dem Abschätzen
der Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol bei der quasi-kohärenten Ermittlung der Symbole
zu unterbinden, deren Symbolsynchronisation nicht vollständig aufgebaut
ist, die Bit-Fehlerraten-Kennlinie bei dem Störabstand zu verbessern und
weiter die Bit-Fehlerraten-Kennlinie bei dem Störabstand zu verbessern, ohne
die Leistungseffizienz des Leistungsverstärkers auf der Senderseite zu
verschlechtern.
-
Wie
oben gezeigt, unterscheidet die vorliegende Erfindung den Modulationstyp
unmittelbar vor und nach dem Symbol von dem Modulationstyp des Pilotsymbols,
und kann deshalb die Verschlechterung der Genauigkeit bei dem Abschätzen der
Referenz-Phase und der Größe der Frequenzverschiebung
durch das Pilotsymbol bei der quasi-kohärenten Ermittlung der Symbole
unterbinden, deren Symbolsynchronisation nicht vollständig aufgebaut
ist, und die Bit-Fehlerraten-Kennlinie bei dem Störabstand
verbessern. Die vorliegende Erfindung kann weiter die Bit-Fehlerraten-Kennlinie
bei dem Störabstand
verbessern, ohne die Leistungseffizienz des Leistungsverstärkers auf
der Senderseite zu verschlechtern, indem die Amplitude an dem Pilotsymbol-Signalpunkt
mehr als die maximale Amplitude an Signalpunkten gemäß dem Mehrwert-Modulations-Typ erhöht wird.
-
Die
vorliegende Erfindung ist nicht auf die Ausführungsformen 1 bis 9 beschränkt, sondern
kann auch mit verschiedenen Modifikationen implementiert werden.
Darüber
hinaus können
die Ausführungsformen
1 bis 9 in einer Vielzahl von geeigneten Kombinationen davon implementiert
werden.
-
Die
vorliegende Erfindung ist nicht auf die oben beschriebenen Ausführungsformen
beschränkt,
und verschiedene Variationen und Modifikationen können möglich sein,
ohne von dem Gültigkeitsbereich
der vorliegenden Erfindung abzuweichen.