CN114425768B - 一种用于搬运机器人的集成式搬运装置 - Google Patents
一种用于搬运机器人的集成式搬运装置 Download PDFInfo
- Publication number
- CN114425768B CN114425768B CN202210333013.5A CN202210333013A CN114425768B CN 114425768 B CN114425768 B CN 114425768B CN 202210333013 A CN202210333013 A CN 202210333013A CN 114425768 B CN114425768 B CN 114425768B
- Authority
- CN
- China
- Prior art keywords
- sliding
- groove
- clamping
- base
- plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0052—Gripping heads and other end effectors multiple gripper units or multiple end effectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0253—Gripping heads and other end effectors servo-actuated comprising parallel grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0616—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
本发明公开了一种用于搬运机器人的集成式搬运装置,涉及集成式搬运装置技术领域搬运机器人包括机械臂和集成式搬运装置,包括支撑装置、夹持装置、变位装置和锁止机构,支撑装置和夹持装置连接,变位装置和支撑装置连接,支撑装置和锁止机构连接,支撑装置包括基座和载板,基座和机械臂连接,载板和基座活动连接,基座上设有推料槽,载板和推料槽活动连接,机械臂为主要的动力驱动机构,给集成式搬运装置提高多自由度位移,支撑装置为主要的安装基础,对其他各装置进行安装,通过夹持装置进行工件夹持,通过变位装置进行物品搬运和位移调整,通过机械臂对基座进行安装固定,通过锁止机构进行自动装夹。
Description
技术领域
本发明涉及集成式搬运装置技术领域,具体为一种用于搬运机器人的集成式搬运装置。
背景技术
近年来,随着智能控制的不断发展,越来越多的企业朝向自动化生产方向发展,为了降低人力成本,通过搬运机器人进行工件装夹和转运。
然而,现有的搬运机器人都只是做简单的搬运使用,在转运过程中无法进行相关加工随着机械设备的不断复杂化,对加工精度要求越来越高,相关工件生产工艺不断增长,加工工位也越来越多,而在进行简单加工时,仍需要增设额外的工位,大大浪费了搬运装置的转运时间。
此外,在进行工件装夹时,不同规格的工件重量不一,通过机械手进行装夹时,所以的夹持力度不一样,尤其是在装夹刚度较小的工件时,夹持力过大,容易造成工件表面夹持损伤。工件在进行前序加工过程中,表面粗糙度也存在差异,尤其是加工初期,表面粗糙度差别较大,夹持力波动范围较大,在进行转运时,容易受到离心力影响,造成定位失衡,产生偏移,影响后续加工。
发明内容
本发明的目的在于提供一种用于搬运机器人的集成式搬运装置,以解决上述背景技术中提出的问题。
为了解决上述技术问题,本发明提供如下技术方案:
一种用于搬运机器人的集成式搬运装置,搬运机器人包括机械臂和集成式搬运装置,包括支撑装置、夹持装置、变位装置和锁止机构,支撑装置和夹持装置连接,变位装置和支撑装置连接,支撑装置和锁止机构连接,支撑装置包括基座和载板,基座和机械臂连接,载板和基座活动连接,基座上设有推料槽,载板和推料槽活动连接。
机械臂为主要的动力驱动机构,给集成式搬运装置提高多自由度位移,支撑装置为主要的安装基础,对其他各装置进行安装,通过夹持装置进行工件夹持,通过变位装置进行物品搬运和位移调整,通过机械臂对基座进行安装固定,通过锁止机构进行自动装夹,通过基座对载板进行安装,通过推料槽对载板进行滑动导向。
进一步的,夹持装置位于载板下侧,夹持装置包括夹爪、夹持气缸、橡胶垫和吸盘,载板下侧设有两个开槽,夹爪和开槽滑动连接,夹持气缸外框和载板紧固连接,夹持气缸输出端和夹爪传动连接,吸盘和负压气源间歇连通,变位装置包括滑环、滑座和调节气缸,滑环和载板紧固连接,滑座和滑环活动连接,调节气缸外框和滑座紧固连接,调节气缸输出端设有安装座,吸盘外侧和安装座紧固连接,夹爪内侧设有楔槽,橡胶垫一侧设有滑片,滑片和楔槽滑动连接,橡胶垫厚度从上到下逐渐递减,橡胶垫置于楔槽内,楔槽朝向工件一侧开口设置,橡胶垫上端伸出楔槽,楔槽高度长于橡胶垫,锁止机构包括锁止电机,基座上设有锁止槽,锁止电机置于锁止槽内,锁止电机输出端设有转盘,转盘沿周向设有若干卡条,锁止电机通过转盘和卡条传动连接,卡条和锁止槽滑动连接,锁止槽包括上升面和越位面,卡条依次与上升面和越位面滑动连接,机械臂一端插入锁止槽内,机械臂上设有若干卡槽,卡条一端和卡槽卡接。
通过载板对夹持气缸进行安装,夹持气缸为夹持行程输入动力源,输出位移带动夹爪对中卡合或者分离松脱,从而对不同尺寸的工件进行夹持,提高夹持效率,通过开槽对夹爪进行滑动导向,吸盘和负压气源间歇连通,使吸盘对工件上侧进行吸附,通过载板对滑环进行安装,通过滑环对滑座进行限位,便于对调节气缸进行安装,调节气缸端部设置安装座,通过安装座对吸盘进行单侧限位,吸盘开口呈喇叭状,提高吸附效率,通过楔槽对滑片进行滑动导向,滑片和橡胶垫单侧连接,降低楔槽对橡胶垫的磨损,初始状态下,通过吸盘对工件上表面进行吸附,调节气缸回缩,通过吸盘带动工件上移,夹持气缸输出位移,带动夹爪对中移动,从而对工件进行初步夹持,当工件下移时通过摩擦带动橡胶垫下移,楔槽为倒三角布置,橡胶垫下端为平面,当工件移动到高位时,吸盘解吸,工件在重力作用下下移,通过摩擦转动,带动橡胶垫下移,随着楔槽壁厚降低,通过工件自重产生的摩擦使橡胶垫压缩,使橡胶垫和工件表面局部压力增大,提高局部柔性夹持力度,辅助夹爪表面对工件机械夹持,从而根据工件自重和局部摩擦力对夹持力进行自动调节,防止夹持力过大,造成夹持损伤,或者夹持力过小造成空载转移,通过锁止槽对锁止电机进行安装,机械臂端部插入锁止槽内,通过锁止电机输出转矩,带动转盘转动,从而使卡条沿锁止槽滑动,卡条为弹性金属,通过上升面和越位面依次对卡条进行滑动导向,上升面和越位面之间具有夹角,越位面下端朝向机械臂的卡槽,通过越位面进行换向,使卡条卡接在卡槽内,从而对机械臂进行自动夹持,通过卡条沿机械臂螺旋布置,提高绞合夹持性能。
进一步的,变位装置还包括推料电缸和检测组件,推料电缸外框和基座紧固连接,推料电缸输出端和载板传动连接,基座上设有推料槽,载板和推料槽滑动连接,载板上设有检测腔,检测组件置于检测腔内,检测组件和推料电缸电连接,检测组件包括磁柱和感应线圈,感应线圈置于检测腔内,磁柱和感应线圈轴线共线,磁柱远离感应线圈一侧设有传动板,传动板和检测腔壁面滑动连接,传动板远离磁柱一端设有复位弹簧,复位弹簧远离传动板一端和检测腔壁面紧固连接。
通过基座对推料电缸进行固定,在进行工件搬运时,机械臂通过转动将工件从输入工位搬运至输出工位,进行辅助搬运,通过转动相对延长产线,进行短距离搬运,检测组件置于检测腔内,通过机械臂进行工件搬运,机械臂的动力驱动机构输出额定转动功率,随着工件重量增大,转速减小,当进行大工件搬运时,转速降低,传动板和检测腔壁面滑动连接,传动板带动磁柱在检测腔离心,感应线圈在磁柱上做切割磁感线运动,产生感应电流,随着转速降低,传动板离心力减小,感应线圈上电流降低,对工件不同转速进行测定,通过复位弹簧,对传动板进行复位,提高连续检测性能。
进一步的,感应线圈和推料电缸电连,磁柱移动方向和推料电缸位移输出方向相反;
增速时:磁柱向远离推料电缸的方向移动,推料电缸输出端回缩;
减速时:磁柱向靠近推料电缸的方向移动,推料电缸输出端伸出。
机械臂的动力驱动机构输出转矩对工件进行工位间搬运时,分成增速、匀速和减速三段行程,当完成工件夹持后,进入增速行程,随着转速增加,工件以机械臂转动中心产生离心力,且离心力逐步递增,磁柱沿远离推料电缸的方向滑动,感应线圈上产生正向电流,推料电缸导通,带动载板回缩,使工件的转动半径降低,降低工件转动过程中产生的离心力,防止工件沿夹爪竖直表面水平滑动,造成错位,影响定位精度;匀速行程磁柱在检测腔内不滑动;进入减速行程后,随着转速降低,传动板和磁柱受到的离心力降低,在复位弹簧弹力作用下,使传动板带动磁柱向靠近推料电缸的方向移动,感应线圈上产生反向电流,推料电缸输出位移,带动载板伸出,直到恢复原位,进行自动定位。
进一步的,集成式搬运装置还包括焊接头,焊接头和变位装置传动连接,变位装置还包括气箱和换向电机,换向电机外框和滑环紧固连接,换向电机输出端和滑座传动连接,滑座上设有滑槽,滑座通过滑槽和滑环滑动连接,焊接头和安装座传动连接,气箱一侧和基座紧固连接,气箱输出端设有升压泵,滑座上设有引流道,气箱通过升压泵和引流道管道连通,引流道和吸盘连通。
通过变位装置对焊接头进行安装,从而进行集成式设计,在搬运过程中对工件进行点焊操作,无需进行多工位转移,通过短距离搬运减少工位,提高工作效率,气箱内存有压缩气体,通过压缩气体进行焊区自动冷却,防止工件局部过热损伤输送带,降低温度对工件结构产生的影响,通过滑环通过滑槽对滑座进行滑动导向,滑座带动焊接头移动,通过调节气缸改变焊接头和工件表面的相对高度,从而进行多角度、多尺寸焊接,提高实用性,通过安装座对焊接头进行固定,通过升压泵进行气体加压,提高循环效率,通过升压后的气流通过引流道导向吸盘,提高喷气冷却性能。
进一步的,引流道包括渐缩段、喉部和渐扩段,渐缩段、喉部和渐扩段依次连通,喉部外侧设有负压流道,负压流道和吸盘连通,变位装置还包括截流板,滑座上设有截流槽,截流槽位于渐扩段末端,截流板和截流槽滑动连接,截流槽位于滑座旋转搬运方向前端,渐扩段和气箱进气口间歇连通。
引流道沿气体流动方向依次设有渐缩段、喉部和渐扩段,通过渐缩段对压缩气体进行加速,进入喉部的气体流速最快,压力最小,喉部通过负压流道和吸盘连通,从而进行负压吸取夹持,此时渐扩段和气箱进气口连通,进行气流循环,滑座随着载板转动,截流槽位于旋转方向前段,在离心作用下,使截流板从截流槽内伸出,从而使渐扩段被局部截断,随着升压泵不断进气,使渐扩段和喉部内压力升高,气体沿负压流道反向流动,通过吸盘喷气,对焊接进行自冷却。
作为优化,截流板上设有若干辅流槽,截流槽倾斜布置。通过辅流槽进行气体导流,截流槽倾斜布置,当滑座随着机械臂搬运转动时,在惯性作用下使截流板从截流槽滑出,通过辅流槽配合截流板改变气体流动形态,加快紊流的出现,从而使渐扩段快速截断,气体从负压流道逆流而出进入吸盘内,进行自降温冷却。
作为优化,辅流槽弧形布置,辅流槽曲率渐变设置。通过辅流槽提高换向平顺性,辅流槽曲率沿截流板伸出方向逐渐增大,使辅流槽外侧局部气体集聚,通过压差,提高截流板伸出效率,提高通断灵敏度。
作为优化,楔槽壁面粗糙度从上到下逐渐递增,滑片和楔槽摩擦接触。通过摩擦接触使楔槽壁面和滑片间存在摩擦力,当滑片下移时,随着摩擦力粗糙度增大,使滑片和楔槽摩擦力增大,从而提高橡胶垫和工件的位差,提高橡胶垫和工件接触处的形变量,从而对工件进行快速限位,提高装夹效率,防止工件脱落。
与现有技术相比,本发明所达到的有益效果是:本发明通过吸盘带动工件上移,夹持气缸输出位移,带动夹爪对中移动,从而对工件进行初步夹持,当工件下移时通过摩擦带动橡胶垫下移,楔槽为倒三角布置,橡胶垫下端为平面,当工件移动到高位时,吸盘解吸,工件在重力作用下下移,通过摩擦转动,带动橡胶垫下移,随着楔槽壁厚降低,通过工件自重产生的摩擦使橡胶垫压缩,使橡胶垫和工件表面局部压力增大,提高局部柔性夹持力度,辅助夹爪表面对工件机械夹持,从而根据工件自重和局部摩擦力对夹持力进行自动调节,防止夹持力过大,造成夹持损伤,或者夹持力过小造成空载转移;当完成工件夹持后,进入增速行程,随着转速增加,工件以机械臂转动中心产生离心力,且离心力逐步递增,磁柱沿远离推料电缸的方向滑动,感应线圈上产生正向电流,推料电缸导通,带动载板回缩,使工件的转动半径降低,降低工件转动过程中产生的离心力,防止工件沿夹爪竖直表面水平滑动,造成错位,影响定位精度;匀速行程磁柱在检测腔内不滑动;进入减速行程后,随着转速降低,传动板和磁柱受到的离心力降低,在复位弹簧弹力作用下,使传动板带动磁柱向靠近推料电缸的方向移动,感应线圈上产生反向电流,推料电缸输出位移,带动载板伸出,直到恢复原位,进行自动定位;通过变位装置对焊接头进行安装,从而进行集成式设计,在搬运过程中对工件进行点焊操作,无需进行多工位转移,通过短距离搬运减少工位,提高工作效率,气箱内存有压缩气体,通过压缩气体进行焊区自动冷却,防止工件局部过热损伤输送带,降低温度对工件结构产生的影响。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
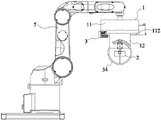
图1是本发明的总体结构示意图;
图2是本发明的动力传动示意图;
图3是本发明的对中夹持示意图;
图4是图3视图的局部A放大视图;
图5是图2视图的局部B放大视图;
图6是图2视图的局部C放大视图;
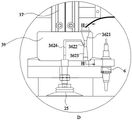
图7是图5视图的局部D放大视图;
图8是图7视图的H-H向剖视图;
图中:1-支撑装置、11-基座、111-锁止槽、112-推料槽、12-载板、121-检测腔、2-夹持装置、21-夹爪、211-楔槽、22-夹持气缸、23-橡胶垫、24-滑片、25-吸盘、3-变位装置、31-推料电缸、32-气箱、33-检测组件、331-磁柱、332-传动板、333-感应线圈、334-复位弹簧、34-滑环、35-换向电机、36-滑座、361-滑槽、362-引流道、3621-渐缩段、3622-喉部、3623-渐扩段、3624-负压流道、363-截流槽、37-调节气缸、38-截流板、381-辅流槽、39-安装座、4-锁止机构、41-锁止电机、42-转盘、43-卡条、5-机械臂、6-焊接头。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提供技术方案:
如图1~图8所示,一种用于搬运机器人的集成式搬运装置,搬运机器人包括机械臂5和集成式搬运装置,包括支撑装置1、夹持装置2、变位装置3和锁止机构4,支撑装置1和夹持装置2连接,变位装置3和支撑装置1连接,支撑装置1和锁止机构4连接,支撑装置1包括基座11和载板12,基座11和机械臂5连接,载板12和基座11活动连接,基座11上设有推料槽112,载板12和推料槽112活动连接。
机械臂5为主要的动力驱动机构,给集成式搬运装置提高多自由度位移,支撑装置1为主要的安装基础,对其他各装置进行安装,通过夹持装置2进行工件夹持,通过变位装置3进行物品搬运和位移调整,通过机械臂5对基座11进行安装固定,通过锁止机构4进行自动装夹,通过基座11对载板12进行安装,通过推料槽112对载板12进行滑动导向。
如图1~图4所示,夹持装置2位于载板12下侧,夹持装置2包括夹爪21、夹持气缸22、橡胶垫23和吸盘25,载板12下侧设有两个开槽,夹爪21和开槽滑动连接,夹持气缸22外框和载板12紧固连接,夹持气缸22输出端和夹爪21传动连接,吸盘25和负压气源间歇连通,变位装置3包括滑环34、滑座36和调节气缸37,滑环34和载板12紧固连接,滑座36和滑环34活动连接,调节气缸37外框和滑座36紧固连接,调节气缸37输出端设有安装座39,吸盘25外侧和安装座39紧固连接,夹爪21内侧设有楔槽211,橡胶垫23一侧设有滑片24,滑片24和楔槽211滑动连接,橡胶垫23厚度从上到下逐渐递减,橡胶垫23置于楔槽211内,楔槽211朝向工件一侧开口设置,橡胶垫23上端伸出楔槽211,楔槽211高度长于橡胶垫23,锁止机构4包括锁止电机41,基座11上设有锁止槽111,锁止电机41置于锁止槽111内,锁止电机41输出端设有转盘42,转盘42沿周向设有若干卡条43,锁止电机41通过转盘42和卡条43传动连接,卡条43和锁止槽111滑动连接,锁止槽111包括上升面和越位面,卡条43依次与上升面和越位面滑动连接,机械臂5一端插入锁止槽111内,机械臂5上设有若干卡槽,卡条43一端和卡槽卡接。
通过载板12对夹持气缸22进行安装,夹持气缸22为夹持行程输入动力源,输出位移带动夹爪21对中卡合或者分离松脱,从而对不同尺寸的工件进行夹持,提高夹持效率,通过开槽对夹爪21进行滑动导向,吸盘25和负压气源间歇连通,使吸盘25对工件上侧进行吸附,通过载板12对滑环34进行安装,通过滑环34对滑座36进行限位,便于对调节气缸37进行安装,调节气缸37端部设置安装座39,通过安装座39对吸盘25进行单侧限位,吸盘25开口呈喇叭状,提高吸附效率,通过楔槽211对滑片24进行滑动导向,滑片24和橡胶垫23单侧连接,降低楔槽211对橡胶垫23的磨损,初始状态下,通过吸盘25对工件上表面进行吸附,调节气缸37回缩,通过吸盘25带动工件上移,夹持气缸22输出位移,带动夹爪21对中移动,从而对工件进行初步夹持,当工件下移时通过摩擦带动橡胶垫23下移,楔槽211为倒三角布置,橡胶垫23下端为平面,当工件移动到高位时,吸盘25解吸,工件在重力作用下下移,通过摩擦转动,带动橡胶垫23下移,随着楔槽211壁厚降低,通过工件自重产生的摩擦使橡胶垫23压缩,使橡胶垫和工件表面局部压力增大,提高局部柔性夹持力度,辅助夹爪表面对工件机械夹持,从而根据工件自重和局部摩擦力对夹持力进行自动调节,防止夹持力过大,造成夹持损伤,或者夹持力过小造成空载转移,通过锁止槽111对锁止电机41进行安装,机械臂5端部插入锁止槽111内,通过锁止电机41输出转矩,带动转盘42转动,从而使卡条43沿锁止槽滑动,卡条43为弹性金属,通过上升面和越位面依次对卡条43进行滑动导向,上升面和越位面之间具有夹角,越位面下端朝向机械臂5的卡槽,通过越位面进行换向,使卡条43卡接在卡槽内,从而对机械臂5进行自动夹持,通过卡条43沿机械臂5螺旋布置,提高绞合夹持性能。
如图2~图5所示,变位装置3还包括推料电缸31和检测组件33,推料电缸31外框和基座11紧固连接,推料电缸31输出端和载板12传动连接,基座11上设有推料槽112,载板12和推料槽112滑动连接,载板12上设有检测腔121,检测组件33置于检测腔121内,检测组件33和推料电缸31电连接,检测组件33包括磁柱331和感应线圈333,感应线圈333置于检测腔121内,磁柱331和感应线圈333轴线共线,磁柱331远离感应线圈333一侧设有传动板332,传动板332和检测腔121壁面滑动连接,传动板332远离磁柱331一端设有复位弹簧334,复位弹簧334远离传动板332一端和检测腔121壁面紧固连接。
通过基座11对推料电缸31进行固定,在进行工件搬运时,机械臂5通过转动将工件从输入工位搬运至输出工位,进行辅助搬运,通过转动相对延长产线,进行短距离搬运,检测组件33置于检测腔121内,通过机械臂5进行工件搬运,机械臂5的动力驱动机构输出额定转动功率,随着工件重量增大,转速减小,当进行大工件搬运时,转速降低,传动板332和检测腔121壁面滑动连接,传动板332带动磁柱331在检测腔121离心,感应线圈333在磁柱331上做切割磁感线运动,产生感应电流,随着转速降低,传动板332离心力减小,感应线圈333上电流降低,对工件不同转速进行测定,通过复位弹簧334,对传动板332进行复位,提高连续检测性能。
如图1、图5所示,感应线圈333和推料电缸31电连,磁柱331移动方向和推料电缸31位移输出方向相反;
增速时:磁柱331向远离推料电缸31的方向移动,推料电缸31输出端回缩;
减速时:磁柱331向靠近推料电缸31的方向移动,推料电缸31输出端伸出。
机械臂5的动力驱动机构输出转矩对工件进行工位间搬运时,分成增速、匀速和减速三段行程,当完成工件夹持后,进入增速行程,随着转速增加,工件以机械臂5转动中心产生离心力,且离心力逐步递增,磁柱331沿远离推料电缸31的方向滑动,感应线圈333上产生正向电流,推料电缸31导通,带动载板12回缩,使工件的转动半径降低,降低工件转动过程中产生的离心力,防止工件沿夹爪21竖直表面水平滑动,造成错位,影响定位精度;匀速行程磁柱331在检测腔内不滑动;进入减速行程后,随着转速降低,传动板332和磁柱331受到的离心力降低,在复位弹簧弹力作用下,使传动板332带动磁柱331向靠近推料电缸31的方向移动,感应线圈333上产生反向电流,推料电缸31输出位移,带动载板12伸出,直到恢复原位,进行自动定位。
如图5~图8所示,集成式搬运装置还包括焊接头6,焊接头6和变位装置3传动连接,变位装置3还包括气箱32和换向电机35,换向电机35外框和滑环34紧固连接,换向电机35输出端和滑座36传动连接,滑座36上设有滑槽361,滑座36通过滑槽361和滑环34滑动连接,焊接头6和安装座39传动连接,气箱32一侧和基座11紧固连接,气箱32输出端设有升压泵,滑座36上设有引流道362,气箱32通过升压泵和引流道362管道连通,引流道362和吸盘25连通。
通过变位装置3对焊接头6进行安装,从而进行集成式设计,在搬运过程中对工件进行点焊操作,无需进行多工位转移,通过短距离搬运减少工位,提高工作效率,气箱32内存有压缩气体,通过压缩气体进行焊区自动冷却,防止工件局部过热损伤输送带,降低温度对工件结构产生的影响,通过滑环34通过滑槽361对滑座36进行滑动导向,滑座36带动焊接头6移动,通过调节气缸37改变焊接头6和工件表面的相对高度,从而进行多角度、多尺寸焊接,提高实用性,通过安装座39对焊接头6进行固定,通过升压泵进行气体加压,提高循环效率,通过升压后的气流通过引流道362导向吸盘25,提高喷气冷却性能。
如图7~图8所示,引流道362包括渐缩段3621、喉部3622和渐扩段3623,渐缩段3621、喉部3622和渐扩段3623依次连通,喉部3622外侧设有负压流道3624,负压流道3624和吸盘25连通,变位装置3还包括截流板38,滑座36上设有截流槽363,截流槽363位于渐扩段3623末端,截流板38和截流槽363滑动连接,截流槽363位于滑座36旋转搬运方向前端,渐扩段3623和气箱32进气口间歇连通。
引流道362沿气体流动方向依次设有渐缩段3621、喉部3622和渐扩段3623,通过渐缩段3621对压缩气体进行加速,进入喉部3622的气体流速最快,压力最小,喉部通过负压流道3624和吸盘25连通,从而进行负压吸取夹持,此时渐扩段3623和气箱32进气口连通,进行气流循环,滑座36随着载板12转动,截流槽363位于旋转方向前段,在离心作用下,使截流板38从截流槽363内伸出,从而使渐扩段3623被局部截断,随着升压泵不断进气,使渐扩段3623和喉部3622内压力升高,气体沿负压流道3624反向流动,通过吸盘25喷气,对焊接进行自冷却。
作为优化,截流板38上设有若干辅流槽381,截流槽363倾斜布置。通过辅流槽381进行气体导流,截流槽363倾斜布置,当滑座36随着机械臂5搬运转动时,在惯性作用下使截流板38从截流槽363滑出,通过辅流槽381配合截流板38改变气体流动形态,加快紊流的出现,从而使渐扩段3623快速截断,气体从负压流道3624逆流而出进入吸盘25内,进行自降温冷却。
作为优化,辅流槽381弧形布置,辅流槽381曲率渐变设置。通过辅流槽381提高换向平顺性,辅流槽381曲率沿截流板38伸出方向逐渐增大,使辅流槽381外侧局部气体集聚,通过压差,提高截流板38伸出效率,提高通断灵敏度。
作为优化,楔槽211壁面粗糙度从上到下逐渐递增,滑片24和楔槽211摩擦接触。通过摩擦接触使楔槽211壁面和滑片24间存在摩擦力,当滑片24下移时,随着摩擦力粗糙度增大,使滑片24和楔槽211摩擦力增大,从而提高橡胶垫23和工件的位差,提高橡胶垫23和工件接触处的形变量,从而对工件进行快速限位,提高装夹效率,防止工件脱落。
本发明的工作原理:通过吸盘25带动工件上移,夹持气缸22输出位移,带动夹爪21对中移动,从而对工件进行初步夹持,当工件下移时通过摩擦带动橡胶垫23下移,楔槽211为倒三角布置,橡胶垫23下端为平面,当工件移动到高位时,吸盘25解吸,工件在重力作用下下移,通过摩擦转动,带动橡胶垫23下移,随着楔槽211壁厚降低,通过工件自重产生的摩擦使橡胶垫23压缩,使橡胶垫和工件表面局部压力增大,提高局部柔性夹持力度,辅助夹爪表面对工件机械夹持,从而根据工件自重和局部摩擦力对夹持力进行自动调节,防止夹持力过大,造成夹持损伤,或者夹持力过小造成空载转移;当完成工件夹持后,进入增速行程,随着转速增加,工件以机械臂5转动中心产生离心力,且离心力逐步递增,磁柱331沿远离推料电缸31的方向滑动,感应线圈333上产生正向电流,推料电缸31导通,带动载板12回缩,使工件的转动半径降低,降低工件转动过程中产生的离心力,防止工件沿夹爪21竖直表面水平滑动,造成错位,影响定位精度;匀速行程磁柱331在检测腔内不滑动;进入减速行程后,随着转速降低,传动板332和磁柱331受到的离心力降低,在复位弹簧弹力作用下,使传动板332带动磁柱331向靠近推料电缸31的方向移动,感应线圈333上产生反向电流,推料电缸31输出位移,带动载板12伸出,直到恢复原位,进行自动定位;通过变位装置3对焊接头6进行安装,从而进行集成式设计,在搬运过程中对工件进行点焊操作,无需进行多工位转移,通过短距离搬运减少工位,提高工作效率,气箱32内存有压缩气体,通过压缩气体进行焊区自动冷却,防止工件局部过热损伤输送带,降低温度对工件结构产生的影响。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
Claims (8)
1.一种用于搬运机器人的集成式搬运装置,所述搬运机器人包括机械臂(5)和集成式搬运装置,其特征在于:所述集成式搬运装置包括支撑装置(1)、夹持装置(2)、变位装置(3)和锁止机构(4),所述支撑装置(1)和夹持装置(2)连接,所述变位装置(3)和支撑装置(1)连接,所述支撑装置(1)和锁止机构(4)连接,支撑装置(1)包括基座(11)和载板(12),所述基座(11)和机械臂(5)连接,所述载板(12)和基座(11)活动连接,所述基座(11)上设有推料槽(112),所述载板(12)和推料槽(112)活动连接;
所述夹持装置(2)位于载板(12)下侧,夹持装置(2)包括夹爪(21)、夹持气缸(22)、橡胶垫(23)和吸盘(25),所述载板(12)下侧设有两个开槽,所述夹爪(21)和开槽滑动连接,所述夹持气缸(22)外框和载板(12)紧固连接,夹持气缸(22)输出端和夹爪(21)传动连接,所述吸盘(25)和负压气源间歇连通,所述变位装置(3)包括滑环(34)、滑座(36)和调节气缸(37),所述滑环(34)和载板(12)紧固连接,所述滑座(36)和滑环(34)活动连接,所述调节气缸(37)外框和滑座(36)紧固连接,所述调节气缸(37)输出端设有安装座(39),所述吸盘(25)外侧和安装座(39)紧固连接,所述夹爪(21)内侧设有楔槽(211),所述橡胶垫(23)一侧设有滑片(24),所述滑片(24)和楔槽(211)滑动连接,所述橡胶垫(23)厚度从上到下逐渐递减,橡胶垫(23)置于楔槽(211)内,所述楔槽(211)朝向工件一侧开口设置,所述橡胶垫(23)上端伸出楔槽(211),所述楔槽(211)高度长于橡胶垫(23),所述锁止机构(4)包括锁止电机(41),所述基座(11)上设有锁止槽(111),所述锁止电机(41)置于锁止槽(111)内,锁止电机(41)输出端设有转盘(42),所述转盘(42)沿周向设有若干卡条(43),所述锁止电机(41)通过转盘(42)和卡条(43)传动连接,所述卡条(43)和锁止槽(111)滑动连接,所述锁止槽(111)包括上升面和越位面,所述卡条(43)依次与上升面和越位面滑动连接,所述机械臂(5)一端插入锁止槽(111)内,机械臂(5)上设有若干卡槽,所述卡条(43)一端和卡槽卡接。
2.根据权利要求1所述的一种用于搬运机器人的集成式搬运装置,其特征在于:所述变位装置(3)还包括推料电缸(31)和检测组件(33),所述推料电缸(31)外框和基座(11)紧固连接,推料电缸(31)输出端和载板(12)传动连接,所述基座(11)上设有推料槽(112),所述载板(12)和推料槽(112)滑动连接,所述载板(12)上设有检测腔(121),所述检测组件(33)置于检测腔(121)内,检测组件(33)和推料电缸(31)电连接,检测组件(33)包括磁柱(331)和感应线圈(333),所述感应线圈(333)置于检测腔(121)内,所述磁柱(331)和感应线圈(333)轴线共线,磁柱(331)远离感应线圈(333)一侧设有传动板(332),所述传动板(332)和检测腔(121)壁面滑动连接,所述传动板(332)远离磁柱(331)一端设有复位弹簧(334),所述复位弹簧(334)远离传动板(332)一端和检测腔(121)壁面紧固连接。
3.根据权利要求2所述的一种用于搬运机器人的集成式搬运装置,其特征在于:所述感应线圈(333)和推料电缸(31)电连,所述磁柱(331)移动方向和推料电缸(31)位移输出方向相反;
增速时:所述磁柱(331)向远离推料电缸(31)的方向移动,所述推料电缸(31)输出端回缩;
减速时:所述磁柱(331)向靠近推料电缸(31)的方向移动,所述推料电缸(31)输出端伸出。
4.根据权利要求3所述的一种用于搬运机器人的集成式搬运装置,其特征在于:集成式搬运装置还包括焊接头(6),所述焊接头(6)和变位装置(3)传动连接,所述变位装置(3)还包括气箱(32)和换向电机(35),所述换向电机(35)外框和滑环(34)紧固连接,换向电机(35)输出端和滑座(36)传动连接,所述滑座(36)上设有滑槽(361),滑座(36)通过滑槽(361)和滑环(34)滑动连接,所述焊接头(6)和安装座(39)传动连接,所述气箱(32)一侧和基座(11)紧固连接,气箱(32)输出端设有升压泵,所述滑座(36)上设有引流道(362),所述气箱(32)通过升压泵和引流道(362)管道连通,所述引流道(362)和吸盘(25)连通。
5.根据权利要求4所述的一种用于搬运机器人的集成式搬运装置,其特征在于:所述引流道(362)包括渐缩段(3621)、喉部(3622)和渐扩段(3623),所述渐缩段(3621)、喉部(3622)和渐扩段(3623)依次连通,所述喉部(3622)外侧设有负压流道(3624),所述负压流道(3624)和吸盘(25)连通,所述变位装置(3)还包括截流板(38),所述滑座(36)上设有截流槽(363),所述截流槽(363)位于渐扩段(3623)末端,所述截流板(38)和截流槽(363)滑动连接,所述截流槽(363)位于滑座(36)旋转搬运方向前端,所述渐扩段(3623)和气箱(32)进气口间歇连通。
6.根据权利要求5所述的一种用于搬运机器人的集成式搬运装置,其特征在于:所述截流板(38)上设有若干辅流槽(381),所述截流槽(363)倾斜布置。
7.根据权利要求6所述的一种用于搬运机器人的集成式搬运装置,其特征在于:所述辅流槽(381)弧形布置,辅流槽(381)曲率渐变设置。
8.根据权利要求7所述的一种用于搬运机器人的集成式搬运装置,其特征在于:所述楔槽(211)壁面粗糙度从上到下逐渐递增,所述滑片(24)和楔槽(211)摩擦接触。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210333013.5A CN114425768B (zh) | 2022-03-31 | 2022-03-31 | 一种用于搬运机器人的集成式搬运装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210333013.5A CN114425768B (zh) | 2022-03-31 | 2022-03-31 | 一种用于搬运机器人的集成式搬运装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114425768A CN114425768A (zh) | 2022-05-03 |
| CN114425768B true CN114425768B (zh) | 2022-08-12 |
Family
ID=81314405
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210333013.5A Active CN114425768B (zh) | 2022-03-31 | 2022-03-31 | 一种用于搬运机器人的集成式搬运装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114425768B (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115091496B (zh) * | 2022-08-08 | 2023-01-31 | 浙江诸暨永勤机械有限公司 | 一种可多角度灵活夹持的工业机器人 |
| CN115593933B (zh) * | 2022-10-28 | 2023-10-17 | 江苏蔚联精密科技有限公司 | 一种具有自动上下料功能的货物周转装置 |
| CN116259210B (zh) * | 2023-05-15 | 2023-07-18 | 江苏长江智能制造研究院有限责任公司 | 一种智能制造用搬运实训机器人 |
| CN116967559B (zh) * | 2023-09-21 | 2023-12-08 | 微网优联科技(成都)有限公司 | 一种在摄像头用pcb板上快速精密焊接接线头的装置及方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2595510Y (zh) * | 2002-12-24 | 2003-12-31 | 天津鼎盛工程机械有限公司 | 压路机振动轮辐板环焊缝自动焊接系统 |
| CN102837103A (zh) * | 2012-09-14 | 2012-12-26 | 长沙长泰机器人有限公司 | 基于三维激光视觉自动化组对及焊接系统 |
| CN103802121A (zh) * | 2014-02-11 | 2014-05-21 | 喻铁军 | 夹手总成的定位结构 |
| CN109332928A (zh) * | 2018-10-23 | 2019-02-15 | 江苏山扬智能装备有限公司 | 基于深度学习在线检测的路灯灯杆自动焊接系统及焊接方法 |
| CN111347455A (zh) * | 2020-03-13 | 2020-06-30 | 天津大学 | 一种摩擦力在线可调的软体手指 |
| CN111844108A (zh) * | 2020-08-20 | 2020-10-30 | 上海金自天正信息技术有限公司 | 一种与六轴机器人配合使用的楔块式自锁抓取装置及方法 |
| WO2021036337A1 (zh) * | 2019-08-28 | 2021-03-04 | 南京驭逡通信科技有限公司 | 一种用于工业机器人的夹持机构 |
| CN212887662U (zh) * | 2020-09-07 | 2021-04-06 | 南京玛可机械有限公司 | 一种宽度可调节机器人夹紧工装 |
| CN215701674U (zh) * | 2021-07-29 | 2022-02-01 | 麦乐峰(厦门)智能科技有限公司 | 一种用于智能化仓库的智能搬运机器人 |
-
2022
- 2022-03-31 CN CN202210333013.5A patent/CN114425768B/zh active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2595510Y (zh) * | 2002-12-24 | 2003-12-31 | 天津鼎盛工程机械有限公司 | 压路机振动轮辐板环焊缝自动焊接系统 |
| CN102837103A (zh) * | 2012-09-14 | 2012-12-26 | 长沙长泰机器人有限公司 | 基于三维激光视觉自动化组对及焊接系统 |
| CN103802121A (zh) * | 2014-02-11 | 2014-05-21 | 喻铁军 | 夹手总成的定位结构 |
| CN109332928A (zh) * | 2018-10-23 | 2019-02-15 | 江苏山扬智能装备有限公司 | 基于深度学习在线检测的路灯灯杆自动焊接系统及焊接方法 |
| WO2021036337A1 (zh) * | 2019-08-28 | 2021-03-04 | 南京驭逡通信科技有限公司 | 一种用于工业机器人的夹持机构 |
| CN111347455A (zh) * | 2020-03-13 | 2020-06-30 | 天津大学 | 一种摩擦力在线可调的软体手指 |
| CN111844108A (zh) * | 2020-08-20 | 2020-10-30 | 上海金自天正信息技术有限公司 | 一种与六轴机器人配合使用的楔块式自锁抓取装置及方法 |
| CN212887662U (zh) * | 2020-09-07 | 2021-04-06 | 南京玛可机械有限公司 | 一种宽度可调节机器人夹紧工装 |
| CN215701674U (zh) * | 2021-07-29 | 2022-02-01 | 麦乐峰(厦门)智能科技有限公司 | 一种用于智能化仓库的智能搬运机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114425768A (zh) | 2022-05-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114425768B (zh) | 一种用于搬运机器人的集成式搬运装置 | |
| CN210413097U (zh) | 管材激光切割设备 | |
| WO2021119957A1 (zh) | 用于工件一体式成型设备 | |
| CN110421358A (zh) | 一种金属管材自动缩径封口机 | |
| CN212420850U (zh) | 一种铝塑盖盖顶抛光设备 | |
| CN211515780U (zh) | 自动冲压折弯设备 | |
| CN218426482U (zh) | 一种气囊式焊接设备 | |
| CN106141680A (zh) | 卷笔刀组装机 | |
| CN209503417U (zh) | 一种铁芯组装设备 | |
| CN113942217B (zh) | 一种步进式吹瓶机连续出瓶机构 | |
| CN112719482A (zh) | 一种弯头攻丝上料装置及上料方法 | |
| CN113334090B (zh) | 一种车床组装用的短管切削机床 | |
| CN218425885U (zh) | 一种滤波器生产用切割装置 | |
| CN115921932A (zh) | 刹车背板钻孔方法和刹车背板钻孔装置 | |
| CN213415337U (zh) | 单向转动轴承壳体上料机构 | |
| CN212526804U (zh) | 一种金属管材自动缩径封口机 | |
| CN211467000U (zh) | 一种用于流水线作业的石材板下料机械臂 | |
| CN114434784A (zh) | 一种针对钢丝网骨架管材端口封装装置 | |
| CN210147261U (zh) | 激光切割机 | |
| CN113399843A (zh) | 一种激光打标装置及激光打标系统 | |
| CN216298202U (zh) | 一种弯头攻丝上料装置 | |
| CN220533206U (zh) | 一种钢管等离子切割机 | |
| CN220462743U (zh) | 一种圈架焊接工装 | |
| CN219131198U (zh) | 一种钢板切割后送料装置 | |
| CN217618448U (zh) | 一种激光切割组件 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |