CN112218780A - 电动车辆 - Google Patents
电动车辆 Download PDFInfo
- Publication number
- CN112218780A CN112218780A CN201980037686.2A CN201980037686A CN112218780A CN 112218780 A CN112218780 A CN 112218780A CN 201980037686 A CN201980037686 A CN 201980037686A CN 112218780 A CN112218780 A CN 112218780A
- Authority
- CN
- China
- Prior art keywords
- power supply
- reception
- connector
- vehicle
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000004891 communication Methods 0.000 claims abstract description 24
- 230000033001 locomotion Effects 0.000 claims description 73
- 238000012544 monitoring process Methods 0.000 claims description 20
- 230000004044 response Effects 0.000 claims description 11
- 230000005540 biological transmission Effects 0.000 claims description 8
- 238000000034 method Methods 0.000 description 76
- 230000008569 process Effects 0.000 description 71
- 238000012545 processing Methods 0.000 description 46
- 238000003384 imaging method Methods 0.000 description 17
- 238000001514 detection method Methods 0.000 description 9
- 230000008859 change Effects 0.000 description 4
- 238000012937 correction Methods 0.000 description 4
- 101150025198 Chtop gene Proteins 0.000 description 3
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 241000282326 Felis catus Species 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
Images





























Classifications
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
- E05F15/42—Detection using safety edges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/14—Conductive energy transfer
- B60L53/16—Connectors, e.g. plugs or sockets, specially adapted for charging electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/14—Conductive energy transfer
- B60L53/18—Cables specially adapted for charging electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
- B60L53/305—Communication interfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
- B60L53/31—Charging columns specially adapted for electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
- B60L53/35—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles
- B60L53/36—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles by positioning the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
- B60L53/35—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles
- B60L53/37—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles using optical position determination, e.g. using cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/65—Monitoring or controlling charging stations involving identification of vehicles or their battery types
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L55/00—Arrangements for supplying energy stored within a vehicle to a power network, i.e. vehicle-to-grid [V2G] arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04H—BUILDINGS OR LIKE STRUCTURES FOR PARTICULAR PURPOSES; SWIMMING OR SPLASH BATHS OR POOLS; MASTS; FENCING; TENTS OR CANOPIES, IN GENERAL
- E04H6/00—Buildings for parking cars, rolling-stock, aircraft, vessels or like vehicles, e.g. garages
- E04H6/42—Devices or arrangements peculiar to garages, not covered elsewhere, e.g. securing devices, safety devices, monitoring and operating schemes; centering devices
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/70—Power-operated mechanisms for wings with automatic actuation
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/70—Power-operated mechanisms for wings with automatic actuation
- E05F15/73—Power-operated mechanisms for wings with automatic actuation responsive to movement or presence of persons or objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/62—Vehicle position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/66—Ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/10—Driver interactions by alarm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/32—Auto pilot mode
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2201/00—Constructional elements; Accessories therefor
- E05Y2201/40—Motors; Magnets; Springs; Weights; Accessories therefor
- E05Y2201/43—Motors
- E05Y2201/434—Electromotors; Details thereof
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2400/00—Electronic control; Electrical power; Power supply; Power or signal transmission; User interfaces
- E05Y2400/10—Electronic control
- E05Y2400/40—Control units therefor
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2400/00—Electronic control; Electrical power; Power supply; Power or signal transmission; User interfaces
- E05Y2400/10—Electronic control
- E05Y2400/52—Safety arrangements associated with the wing motor
- E05Y2400/53—Wing impact prevention or reduction
- E05Y2400/54—Obstruction or resistance detection
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/50—Application of doors, windows, wings or fittings thereof for vehicles
- E05Y2900/53—Type of wing
- E05Y2900/534—Fuel lids, charger lids
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0013—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries acting upon several batteries simultaneously or sequentially
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/12—Electric charging stations
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/14—Plug-in electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
- Y02T90/167—Systems integrating technologies related to power network operation and communication or information technologies for supporting the interoperability of electric or hybrid vehicles, i.e. smartgrids as interface for battery charging of electric vehicles [EV] or hybrid vehicles [HEV]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y04—INFORMATION OR COMMUNICATION TECHNOLOGIES HAVING AN IMPACT ON OTHER TECHNOLOGY AREAS
- Y04S—SYSTEMS INTEGRATING TECHNOLOGIES RELATED TO POWER NETWORK OPERATION, COMMUNICATION OR INFORMATION TECHNOLOGIES FOR IMPROVING THE ELECTRICAL POWER GENERATION, TRANSMISSION, DISTRIBUTION, MANAGEMENT OR USAGE, i.e. SMART GRIDS
- Y04S10/00—Systems supporting electrical power generation, transmission or distribution
- Y04S10/12—Monitoring or controlling equipment for energy generation units, e.g. distributed energy generation [DER] or load-side generation
- Y04S10/126—Monitoring or controlling equipment for energy generation units, e.g. distributed energy generation [DER] or load-side generation the energy generation units being or involving electric vehicles [EV] or hybrid vehicles [HEV], i.e. power aggregation of EV or HEV, vehicle to grid arrangements [V2G]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y04—INFORMATION OR COMMUNICATION TECHNOLOGIES HAVING AN IMPACT ON OTHER TECHNOLOGY AREAS
- Y04S—SYSTEMS INTEGRATING TECHNOLOGIES RELATED TO POWER NETWORK OPERATION, COMMUNICATION OR INFORMATION TECHNOLOGIES FOR IMPROVING THE ELECTRICAL POWER GENERATION, TRANSMISSION, DISTRIBUTION, MANAGEMENT OR USAGE, i.e. SMART GRIDS
- Y04S30/00—Systems supporting specific end-user applications in the sector of transportation
- Y04S30/10—Systems supporting the interoperability of electric or hybrid vehicles
- Y04S30/14—Details associated with the interoperability, e.g. vehicle recognition, authentication, identification or billing
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Human Computer Interaction (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
本发明提供电动车辆。该电动车辆是具有蓄电装置的电动车辆,具备能够进行蓄电装置和设置于车辆外部的供受电装置的电力的授受的供受电口、驱动供受电口的盖部的盖部驱动部、和接收来自供受电装置的信号的通信部,并根据来自供受电装置的信号控制盖部驱动部的驱动。
Description
技术领域
本发明涉及电动车辆。
背景技术
已知有根据对象物的位置移动供电连接器的系统(例如,参照专利文献1)。
专利文献1:日本特开2009-249856号公报
发明内容
电动汽车在停车中向搭载的2次电池连接外部电源来进行充电由此确保用于行驶的能量。为了与外部电源进行连接,需要将充电用的连接器和设置于车辆的充电口连接。另外,与是否需要充电无关地与外部电源连接来进行电力的供受的所谓V2G(Vehicle toGrid)的技术也被开发,此时也需要将充电用的连接器和设置于车辆的充电口连接。
将充电用的连接器与车辆的充电口连接对于驾驶员而言非常麻烦,期望被自动化。在进行通常使用时的充电、基于V2G等的要求的供受电的情况下连接频度变高,期望被简化。虽然利用充电座等来充放电的所谓非接触充电的技术也被开发,但在充电効率或成本这方面无法得到充分的成果。
根据本发明的第一方式,提供一种具有蓄电装置的电动车辆。电动车辆可以具备能够进行蓄电装置和设置于车辆外部的供受电装置的电力的授受的供受电口。电动车辆可以具备驱动供受电口的盖部的盖部驱动部。电动车辆可以具备接收来自供受电装置的信号的通信部。电动车辆可以根据来自供受电装置的信号来控制盖部驱动部的驱动。
上述电动车辆可以根据来自上述供受电装置的信号,使上述盖部驱动部对上述供受电口的上述盖部进行闭盖。上述电动车辆可以根据来自上述供受电装置的信号,使上述盖部驱动部对上述供受电口的上述盖部进行开盖。上述电动车辆可以根据对上述盖部的周边进行监视的监视部的监视结果来控制上述盖部驱动部的驱动。上述电动车辆可以具备上述监视部。上述监视部可以设置于上述供受电装置,上述电动车辆可以接收上述供受电装置的上述监视部的监视结果,根据接收的上述监视结果来控制上述盖部驱动部的驱动。上述供受电装置可以具备供受电用的连接器、和驱动上述连接器来控制上述连接器和上述供受电口的连接的连接控制装置。上述连接控制装置可以在上述盖部被开盖之后实施上述连接器的连接控制。
根据本发明的第二方式,提供一种具有供受电口的电动车辆。电动车辆可以具备对具有使与供受电口连结的连接器在横向以及上下方向移动的连接器移动部的供受电装置发送供受电要求的供受电要求发送部。电动车辆可以具备接收由接收到供受电要求的供受电装置发送的、对供受电口的盖部进行开盖的开盖指示的开盖指示接收部。电动车辆可以具备响应于开盖指示接收部接收到开盖指示这一情况,对供受电口的所述盖部进行开盖的盖部驱动部。电动车辆还可以具备从供受电装置接收对盖部进行闭盖的闭盖指示的闭盖指示接收部,盖部驱动部可以响应于闭盖指示接收部接收到闭盖指示这一情况,对盖部进行闭盖。
根据本发明的第三方式,提供一种具有供受电口的电动车辆。电动车辆可以具备对具有使与供受电口连结的连接器在横向以及上下方向移动的连接器移动部的供受电装置发送供受电要求的供受电要求发送部。电动车辆可以具备在由接收到供受电要求的供受电装置基于供受电口的位置和电动车辆的周围的状况判定为无法实施电动车辆的供受电的情况下,接收由供受电装置发送的移动指示的移动指示接收部。电动车辆可以具备按照移动指示接收部接收的移动指示来使电动车辆移动的移动控制部。
另外,上述的发明的概要并未例举本发明的所有必要技术特征。另外,这些特征组的子组合也可以成为发明。
附图说明
图1简要示出供受电设备100的一例。
图2简要示出供受电设备100的一例。
图3简要示出连接器移动部110的一例。
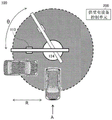
图4简要示出连接器120的旋转区域130的一例。
图5简要示出供受电设备100的其他的一例。
图6简要示出供受电设备100的其他的一例。
图7简要示出供受电设备100的其他的一例。
图8简要示出供受电设备100的其他的一例。
图9简要示出供受电设备100的其他的一例。
图10简要示出供受电设备100的其他的一例。
图11简要示出供受电设备100的其他的一例。
图12简要示出供受电设备控制单元200的通信环境的一例。
图13简要示出连接器120的连接判断处理710的一例。
图14简要示出连接器120的连接控制处理720的一例。
图15简要示出连接器120的连接控制处理730的一例。
图16简要示出供受电控制处理740的一例。
图17简要示出连接器解除控制处理750的一例。
图18简要示出连接器解除控制处理760的一例。
图19简要示出供受电设备控制单元200的功能构成的一例。
图20简要示出车辆300的构成的一例。
图21简要示出控制装置320的功能构成的一例。
图22简要示出车辆800的供受电口以及外部传感器的配置例。
图23简要示出车辆800的构成的一例。
图24简要示出充放电控制单元830的通信环境的一例。
图25简要示出供受电口860以及盖部870的外观的一例。
图26示出供受电口860以及盖部870的A-A剖面图的一例。
图27示出供受电口860以及盖部870的A-A剖面图的一例。
图28简要示出供受电口盖状态判别处理910的一例。
图29简要示出供受电口开盖控制处理920的一例。
图30简要示出供受电口闭盖控制处理930的一例。
具体实施方式
以下,通过发明的实施方式对本发明进行说明,但以下的实施方式不对权利要求书涉及的发明进行限定。另外,实施方式中说明的所有特征的组合对于发明的解决手段未必是必须的。
图1以及图2简要示出供受电设备100的一例。供受电设备100可以是供受电装置的一例。图1是从上方俯视供受电设备100的图,图2是如图1所示那样从箭头A的水平方向观察的图。本实施方式涉及的供受电设备100具备与车辆300的供受电口连结的连接器120、使连接器120在横向以及上下方向移动的连接器移动部110。车辆300可以是电动汽车。这里所说的电动车辆可以是单纯的电动车、即所谓的EV(Electric Vehicle),也可以是能够外部充电的混合动力车辆、即所谓的PHEV(Plug-in Hybrid Electric Vehicle)。图1所示的X方向、Y方向可以是横向,Z方向可以是上下方向。
供受电设备100被供受电设备控制单元200控制。供受电设备控制单元200可以与供受电设备100有线连接,另外也可以无线连接。
供受电设备控制单元200获取表示车辆300的位置的位置信息。另外,供受电设备控制单元200获取车辆300的车辆信息。车辆信息包含车辆300的尺寸以及车辆300的供受电口的位置等。
供受电设备控制单元200基于获取的位置信息以及车辆信息,判断车辆300的供受电口的位置。并且,供受电设备控制单元200在使连接器移动部110将连接器120沿横向移动至比预先设定的高度高的位置之后,使其沿上下方向移动,由此使连接器120对准供受电口的位置,从而使连接器120与供受电口连结。供受电设备控制单元200例如在使连接器120沿横向移动至比预先设定的高度高的位置之后,使其沿上下方向移动,由此使连接器120对准供受电口的位置,之后根据需要使连接器移动部110旋转连接器120来使连接器120沿横向移动,从而使连接器120与供受电口连结。作为预先设定的高度,可以设定比车辆300的车高高的高度。供受电设备控制单元200可以是驱动连接器120来控制连接器120和车辆300的供受电口的连接的连接控制装置的一例。
供受电设备100可以能够经由连接器120向车辆300供给电力。另外,供受电设备100可以能够经由连接器120从车辆300接受电力。供受电可以是向车辆300供给电力。另外供受电可以是从车辆300接受电力。供受电也可以包含向车辆300供给电力、以及从车辆300接受电力的双方。供受电设备100能够将连接器120与在供受电区域102内配置有供受电口的车辆300连接。
如上述那样,通过使连接器120在比预先设定的高度高的位置沿横向移动,由此能够防止在移动中连接器与车辆300等接触。另外,通过在使连接器120沿横向移动后,沿上下方向移动来定位于供受电口的位置从而将连接器120与车辆300的供受电口连接,由此能够不经由人工地将连接器120与车辆300连接。由此,能够使连接器120与供受电口的连接自动化,能够降低车辆300的使用者的负荷。由于车辆300的充电是日常作业,因此连接的自动化的需要较高。另外,由于具备本系统的停车场的充电作业不再繁琐,因此能够提高停车服务的附加价值。另外,能够利用较少的充电设备来对较多的车辆300高效地充电。
图3简要示出连接器移动部110的一例。连接器移动部110具有行驶轨道112、座架114、大梁116以及连接器支持部122。通过座架114在行驶轨道112行驶、以及连接器支持部122沿大梁116移动,使连接器120沿横向移动。另外,连接器支持部122使连接器120沿上下方向移动。图2所示的连接器移动部110的构造是一例,只要能够使连接器120沿横向以及上下方向移动,则也可以采用其他的构造。
图4简要示出连接器120的旋转区域130的一例。供受电设备控制单元200可以使连接器移动部110将连接器120旋转。供受电设备控制单元200可以考虑连接器120的旋转区域130,来使连接器移动部110将连接器120移动。
图5以及图6简要示出供受电设备100的其他的一例。图5是对供受电设备100从上方俯视的图,图6是如图5所示那样从箭头A的水平方向观察的图。在图1以及图2中,对供受电设备100具有与1台对应的空间的情况为例进行了说明,但供受电设备100可以具有与任意的台数对应的空间。在图5以及图6中,例示了具有与3台对应的空间的供受电设备100。供受电区域是102所示的范围。此时,也可以将连接器移动部110以及连接器120设置两个以上。
图7以及图8简要示出供受电设备100的其他的一例。图7是对供受电设备100从上方俯视的图,图8是如图7所示那样从箭头A的水平方向观察的图。在图7以及图8中,例示了具有与4台对应的空间的供受电设备100。供受电区域是102所示的范围。此时,也可以将连接器移动部110以及连接器120设置两个以上。
图9简要示出供受电设备100的其他的一例。如图9所示,只要对于供受电设备100在供受电区域102内配置供受电口,则也可以以任意的角度配置多个车辆300。供受电区域是102所示的范围。此时,也可以将连接器移动部110以及连接器120设置两个以上。通过以这样的方式使车辆相对于供受电设备停车,能够使车辆的停车自由度较大地提高。并且,由于能够在供受电区域102内配置更多的车辆的供受电口,因此能够进行更多的车辆的供受电控制,能够有效地活用供受电设备100。
图10以及图11简要示出供受电设备100的其他的一例。图10是对供受电设备100从上方俯视的图,图11是如图10所示那样从箭头A的水平方向观察的图。在上述实施方式中,列举通过行驶轨道112、座架114以及大梁116使连接器120沿横向移动的例子进行了说明,但不限于此。连接器移动部110例如也可以如图10、图11所例示的那样,通过以支柱124为中心的转动移动来使连接器120沿横向移动。此时,规定在上述实施方式示出的水平方向上的位置的X坐标和Y坐标能够分别置换为R坐标和旋转角度θ。供受电区域是102所示的范围。此时,也可以将连接器移动部110以及连接器120设置两个以上。在这样的供受电设备中,车辆的停车自由度被较大地提高。并且,由于能够在供受电区域102内配置更多的车辆的供受电口,因此能够进行更多的车辆的供受电控制,能够有效活用供受电设备100。
图12简要示出供受电设备控制单元200的通信环境的一例。供受电设备控制单元200可以能够与供受电设备100、车辆300、电源线400、外部服务器500以及移动终端600进行通信。
供受电设备控制单元200与供受电设备100之间收发各种信息。例如,供受电设备控制单元200从供受电设备100接收由供受电设备100具备的拍摄装置拍摄的车辆300的图像信息、表示在由供受电设备100检测的车辆300的周边存在的障碍物的障碍物信息、在由供受电设备100检测的车辆300的周边存在的生物体信息、由连接器120具有的拍摄装置拍摄的连接器图像信息等。另外,供受电设备控制单元200与使供受电设备100具有的连接器120移动的连接器致动器通信。
供受电设备控制单元200与车辆300之间收发各种信息。例如,供受电设备控制单元200接收表示车辆300的车种的车种信息、包含车辆300的尺寸以及供受电口的位置等的车辆信息、包含供受电要求等的供受电信息、表示车辆300的位置的车辆位置信息等。
供受电设备控制单元200与电源线400之间收发各种信息。例如,供受电设备控制单元200从电源线400接收包含电力的供给量等的信息的电力供给信息、表示电力的单价的电力单价信息、供受电要求、以及表示供受电设备100的预约状况的设备预约状况等。
供受电设备控制单元200与外部服务器500之间收发各种信息。供受电设备控制单元200例如在对车辆300供给电力的情况下,为了对车辆300的所有者等进行收费等,将电力量的信息、费用的信息等与外部服务器500进行通信。
供受电设备控制单元200与移动终端600之间收发各种信息。移动终端600例如是车辆300的所有者使用的终端。移动终端600例如可以是智能电话等的便携电话以及平板电脑终端等。供受电设备控制单元200例如将车辆300的充电状况向移动终端600发送。作为具体例,供受电设备控制单元200将车辆300的蓄电池的充电完成程度、至车辆300满充电为止花费的时间等的信息向移动终端600发送。
图13简要示出连接器120的连接判断处理710的一例。对于图13所示的处理,可以由供受电设备控制单元200具备的控制部成为主体来执行。各处理可以以200msec的周期来执行。各处理可以以200msec以外的周期来执行,另外也可以与其他的信号同步地执行。流程中的各决定基本上在肯定结果的情况下向下进行。
在步骤(有时将步骤简称为S。)7102中,确认能够与供受电设备100通信的车辆300是否存在,在存在的情况下进入S7106。在不存在能够通信的车辆300的情况下进入S7104,将F_CCOK设为0而结束处理。F_CCOK是表示是否能够进行连接器120的移动连接的标志,1对应于能够,0对应于不能够。在S7106中,判断F_CCOK是否为0,在否定的情况下,由于已经在以前的例程中完成处理,在后述的S7118中标志被设为1,连接器120的移动连接处于能够(=1)的状态,因此结束连接判断处理710。
在S7108中,与车辆进行通信。从供受电设备控制单元200向车辆发送供受电设备100的供受电区域102的信息、充电费用、排队状况、充电预测时间、向电网的供电参加可能性、从供受电设备100一侧识别的车辆的位置信息等。供受电设备控制单元200例如可以通过参照由监视对车辆进行停车的空间的拍摄装置拍摄的图像来确定车辆的位置。从车辆向供受电设备控制单元200发送来自车辆的信息(车种、供受电要求、驻车(停车)意思的判断、位置信息等)以及拍摄了车辆的图像信息等。
在S7110中,根据向车辆的供受电区域102内的停车可能性判断供受电可能性。此时,不是一定需要来自车辆一侧的供受电的意思表示。在没有供受电可能性的情况下,结束连接判断处理710。在S7112中,判断车辆是否处于停止状态。这是因为,若车辆不是停止状态,则连接器120的移动连接无法开始。在车辆不是停止状态的情况下,结束连接判断处理710。
在S7114中,确认是否在停止的车辆的供受电口的附近确保了为了连接连接器所需的空间。此时,也可以考虑旋转区域130和其他的停车车辆的位置关系等。例如,即使连接器120能够旋转,在对其他车的乘降有影响的情况下,也可以进一步将对后续停车的其他的车辆的停车的考虑等包含在内来进行判断。
在S7116中,判定供受电口位置是否能够进行连接器连接,在能够进行连接器连接的状态的情况下,进入S7118,在不能够进行连接器连接的状态的情况下,进入S7120。在S7118中,F_CCOK被设为1。对于F_CCOK,也存在在车辆停车后,根据其他的车辆的停车状况等被重置为0的情况。例如,存在后续车以堵塞本车辆的供受电口的方式停车的情况等。
在S7120中,在进行向供受电设备的连接时,向车辆通知需要进行停车位置变更的情况。供受电设备控制单元200例如将表示需要进行停车位置变更的数据向车辆发送。供受电设备控制单元200也可以一起将表示能够连接连接器120的位置的位置信息向车辆通知。向车辆300通知在当前的停车位置无法开始通知连接器120的移动连接,能够在有供受电的意思的情况下督促停车位置的变更。另外,只要是具备能够自动变更停车位置的自动驾驶装置的车辆,则也可以将停车位置的变更指示给自动驾驶装置。
在F_CCOK=0的状态下完成停车的情况下,由于自动方式的连接器120的连接一直无法进行,因此不进行之后的控制。在F_CCOK=1的状态下完成停车的情况下,根据供受电的要求执行包含连接器120的自动连接的之后的控制。
图14简要示出连接器120的连接控制处理720的一例。图14所示的处理可以由供受电设备控制单元200具备的控制部成为主体来执行。
在S7202中,判断F_CCOK是否为1,在否定的情况下结束连接器120的连接控制处理720。在肯定的情况下,进入S7204。在S7204中,判断F_CHRQ是否为1。F_CHRQ是判定是否有供受电的要求的标志,在未图示的处理中被设定。标志为0表示没有要求,为1表示有要求。对于F_CHRQ而言,通常是充电要求的情况较多。这些可以通过来自车辆的要求、来自向车辆输入的车辆管理者的要求等来设定,由充电量、充电结束时间、充电成本的指标来决定。另外,也考虑对因供受电设备100的混杂程度等成为排队的情况的状况变化了的情况等预定进行变更的情况。并且对于F_CHRQ而言,可以构成为能够由车辆管理者等与车辆或供受电设备100进行通信的移动终端600等设定,在当初没有充电预定的情况下也能够通过对移动终端600进行操作来进行充电指示。在有与电源线400进行电力授受的V2G的要求的情况下也与充电要求同样地根据车辆管理者的判断来设定F_CHRQ。在判断为F_CHRQ=0的情况下,由于能够判断为没有供受电的要求,因此结束连接器120的连接控制处理720。
在S7206中,判断F_CCFN是否为0。F_CCFN是判定连接器120是否已与对象的车辆连接的标志,0表示未连接状态,1表示连接状态。在F_CCFN=0为否定的情况下,因为F_CCFN=1,连接器120已经与对象的车辆连接,所以结束连接器120的连接控制处理720。在F_CCFN=0为肯定的情况下,进入S7208以后的处理。
在S7208中,获取车种信息,根据车种信息确定连接器种、连接器连接位置等。在S7210中,获取车辆位置信息。车辆位置信息包含车辆的停车状态、朝向、障碍物的有无等。并且,供受电设备控制单元200计算供受电口的位置以及朝向。在S7212中,将对覆盖供受电口的盖部进行开盖的开盖指示向车辆发送。在车辆是手动打开供受电口的盖部的类型的车辆的情况下,供受电设备控制单元200可以根据图像、通信信息来判断盖部是否被打开。之后,进入S730的连接器连接控制。
图15简要示出连接器120的连接控制处理730的一例。图11所示的处理可以由供受电设备控制单元200具备的控制部成为主体来执行。
在S7302中,判定F_CCM是否为0。F_CCM是判定是否是连接器120的连接控制中的标志,1表示连接控制中,0表示不是连接控制中。由于在最初进行连接控制处理730时为0,因此进入S7304,获取连接器120的目标坐标。另外X、Y、Z与图1以及图2中示出的坐标对应。XTG是使连接器120移动的坐标的目标值,X0是计算出的供受电口位置的坐标,Xa是根据车辆位置、朝向求出的在连接器连接前移动的目标的修正值。YTG是使连接器120移动的坐标的目标值,Y0是计算出的供受电口位置的坐标,Ya是根据车辆位置、朝向求出的在连接器连接前移动的目标的修正值。ZTG是使连接器120移动的坐标的目标值,Z0是计算出的供受电口位置的坐标,Za是根据车辆位置、朝向求出的在连接器连接前移动的目标的修正值。
利用Xa、Ya进行修正的理由在于,为了考虑连接器120单体的大小而使连接器移动至应该开始连接控制的位置。ω表示连接器朝向供受电口的旋转角度,ω与图3所示的旋转角度对应。ωTG是连接器的旋转角度的目标值,ω0是计算出的连接器的旋转角度。在S7306中,由于规定各坐标的目标值而成为连接器120的连接控制中的状态,因此将F_CCM设为1。
在S7308中,判定当前的Z的坐标是否在规定的高度Zh以上,在否的情况下,在S7310中进行控制使得Z坐标成为Zh来进入S7324。在S7324中,将判定连接器120是否已与对象的车辆连接的标志F_CCFN设为与未连接状态对应的0,来结束该例程。对于Zh而言,优选设为比进行连接器连接的车辆300的高度高的值,也可以根据获取的车种信息等来设定。另外对于Zh而言,也可以考虑供受电设备周边存在的障碍物等来设定为规定的高度以上(例如Zh=2.5m)的固定值。在Z≧Zh的情况下,进入S7312,朝向X、Y的坐标XTG、YTG进行控制。另外使连接器120朝向ωTG旋转,使连接器和供受电口相对。在进行这些处理前使Z坐标移动至Zh以上是为了防止在使连接器120的X、Y坐标移动或旋转的情况下与车辆以及其他的障碍物的干扰。另外,也可以朝向ωTG的旋转不在S7312中执行,而是与后述的S7320的处理一起执行。
在S7314中,判断连接器120的X、Y坐标是否分别成为XTG、YTG、以及连接器120的旋转角度是否成为ωTG。在否定的情况下,进入S7324,反复进行连接器120的连接控制处理730,由此持续进行处理直到各个值成为目标值。若判断为各个值成为目标值则进入S7316,将Z轴控制成目标值。此时,连接器120被控制为总是从车辆的上方朝向供受电口下降。在连接器120的下降中,在使用设置于连接器120的摄像头、传感器等来检测障碍物并存在接触的可能的情况下中止下降。另外,在检测到与障碍物的接触的情况下也同样中止下降。另外也可以以避免接触的方式适当地调整X方向、Y方向、旋转角度ω,之后继续进行向Z方向的移动。
在S7318中,判断Z轴的坐标是否被控制为ZTG。在否定的情况下,进入S7324,反复进行连接器120的连接控制处理730来继续处理,直到Z轴的坐标成为目标值。在肯定的情况下,由于是X、Y、ω、Z全部被控制为目标值的状态,因此进入S7320,进行向供受电口最终连接的控制。对于控制而言,根据设置于连接器末端的摄像头、雷达等的信息控制致动器来进行。另外连接器也可以与充电的车种对应地设置多个。在S7322中,判定连接器连接是否完成。在否定的情况下进入S7324。另一方面,在S7322中为肯定的情况下由于连接器连接已经完成,因此在S7326中将判定连接器120是否已与对象的车辆连接的标志F_CCFN设为1。之后,在S7328中,将判定是否是连接器120的连接控制中的标志F_CCM设为0。
另外在图10以及图11那样的控制供受电设备的情况下,通过将图15中所示的流程的X坐标、Y坐标分别置换为R坐标、旋转角度θ,能够同样地进行控制。
图16简要示出供受电控制处理740的一例。图16所示的处理可以由供受电设备控制单元200具备的控制部成为主体来执行。
在S7402中,判断F_CCOK是否为1,在否定的情况下,由于是车辆无法与供受电设备100通信的状态,因此结束供受电控制处理740的处理。在肯定的情况下进入S7404,确认表示是否有供受电的要求的标志F_CHRQ的值。在否定的情况下,由于能够判断为没有供受电的要求,因此结束供受电控制处理740的处理。在肯定的情况下判断为有供受电要求,进入S7406,通过是否F_CCFN=1来判定连接器是否已与对象的车辆连接。否定的情况下,由于连接器没有与对象的车辆连接,因此进入S7408,实施连接器连接控制。在肯定的情况下判断为能够供受电,进入S7410实施供受电控制。供受电的控制内容可以在判断F_CHRQ=1的过程中设定。可以设定充电电力量或蓄电池容量的规定值、是否需要基于V2G的供受电控制、以及控制时间等。
在S7412中,判断是否实现了当前的要求内容,如果没有满足供受电要求,则进入S7414,对表示供受电结束的标志亦即F_CHFN设置表示供受电结束的0。在判断为实现了当前的要求内容而供受电结束的情况下进入S7416,将F_CHFN设为1。之后进入S7418,由于这次的供受电要求已实现,因此将F_CHRQ重置为0。
图17简要示出连接器解除控制处理750的一例。图15所示的处理可以由供受电设备控制单元200具备的控制部成为主体来执行。
在S7502中,判定F_CCFN是否为1。由于若F_CCFN=0则连接器120被解除连接,因此结束处理。在肯定的情况下进入S7504,判定F_CHFN是否为1。通过F_CHFN判断供受电结束,在否定的情况下判断为供受电控制在继续,结束连接器解除控制处理750。而在肯定的情况下判断供受电结束,实施连接器解除控制处理760。
图18简要示出连接器解除控制处理760的一例。图18所示的处理可以由供受电设备控制单元200具备的控制部成为主体来执行。
在S7602中,判断F_CCM是否为0。F_CCM是判定是否是连接器120的移动控制中的标志,1表示移动控制中,0表示不是移动控制中。在否定的情况下进入S7606。另一方面,在肯定的情况下,进入S7604,设定连接器120解除时的目标坐标。XTG、YTG分别是使连接器移动的X坐标、Y坐标的目标值、Xb,Yb是收纳连接器的坐标。ZTG是Z坐标的目标值,Zb是收纳连接器的Z坐标。Zb优选与前面出现的Zh相同或比其高的位置,Zh也能够被设定为在Z坐标能够移动的最大的值。Xb,Yb可以是各坐标的端部或供受电设备100的中央部等的规定的位置,也可以学习供受电口被频繁设置的附近的坐标来设定。另外,连接器120的旋转角度的目标值ωTG也被设定为规定的角度ωb。
若XTG、YTG、ZTG、ωTG全部被设定则进入S7606。在S7606中,由于决定各座标的目标值而成为连接器120的连接控制中的状态,因此将F_CCM设为1。在S7608中,以最初高度方向的座标Z成为ZTG的方式使连接器120移动。在S7610中,判断是否Z=ZTG,在否定的情况下,反复进行连接器120的连接控制处理,由此持续进行处理直至Z的值达到ZTG。另一方面,在Z=ZTG是肯定的情况下,由于连接器120达到了目标的高度,因此进入S7612。在S7612中,进行控制使得连接器120的X座标、Y座标、旋转角度ω分别成为目标值。在S7614中,判断连接器120的X座标、Y座标、旋转角度ω是否分别达到了目标值。在否定的情况下,反复进行连接器120的连接控制处理,由此持续进行处理直至X座标、Y座标、旋转角度ω各自的值达到目标值。在肯定的情况下,进入S7616,由于连接器120的连接解除已结束,因此将F_CCFN设为0。接着,由于在S7618中连接器120的移动控制结束,因此将F_CCM设为0。并且进入S7620,将对供受电口的盖部进行闭盖的闭盖指示向车辆发送,并结束连接器解除控制处理760。
另外在如图10以及图11那样的控制供受电设备的情况下,通过将图18中所示的流程的X坐标、Y坐标分别置换成R坐标、旋转角度θ,能够同样地进行控制。
图19简要示出供受电设备控制单元200的功能构成的一例。供受电设备控制单元200具备位置信息获取部202、车辆信息获取部204、连接器设定部206、位置判断部208、实施判定部212、移动指示发送部214、移动控制部218、障碍物检测部220、警告发生部222、开盖指示发送部224、闭盖指示发送部226、范围判定部230、历史保存部232以及配置决定部234。另外,供受电设备控制单元200不是必须具备这些所有的构成。
位置信息获取部202获取表示车辆300的位置的位置信息。位置信息获取部202例如通过对由供受电设备100具有的拍摄装置拍摄的图像进行解析,获取表示车辆300的位置的位置信息。位置信息获取部202也可以从车辆300接收车辆位置信息。
车辆信息获取部204获取车辆300的车辆信息。车辆信息获取部204也可以从车辆300接收车辆信息。
连接器设定部206基于车辆信息获取部204获取的车辆信息来设定连接器120。连接器设定部206可以根据车辆300的种类来设定连接器120。例如,连接器设定部206预先保存车辆300的每个种类的连接器120的设定,读出与车辆信息获取部204所获取的车辆信息所示的车辆300的种类对应的连接器120的设定,并按照该设定设定连接器120。
位置判断部208基于位置信息获取部202获取的位置信息以及车辆信息获取部204获取的车辆信息来判断车辆300的供受电口的位置。
实施判定部212通过与车辆300通信,来判定是否实施车辆300的供受电。实施判定部212例如基于由位置判断部208判断的供受电口的位置和车辆300的周围的状况,来判定是否实施车辆300的供受电。实施判定部212例如在根据在供受电口的附近存在其他的车辆而判定为连接器120的前进道路受阻的情况下,判定为不实施车辆300的供受电。
移动指示发送部214在通过实施判定部212判定为无法实施车辆300的供受电的情况下,向车辆300发送移动指示。移动指示发送部214例如将表示为了连接连接器120而需要进行停车位置变更的数据向车辆300发送。移动指示发送部214也可以基于供受电口的位置和车辆300的周围的状况,生成表示能够将连接器120与供受电口连接的车辆300的位置的位置信息,将该位置信息一起向车辆300发送。
移动控制部218在使连接器移动部110将连接器120在比预先设定的高度高的位置沿横向移动后,沿上下方向移动来将连接器120定位于车辆300的供受电口的位置,由此将连接器120与供受电口连接。移动控制部218在通过实施判定部212判定为实施车辆300的供受电的情况下,可以使连接器120定位于供受电口的位置来连接。移动控制部218可以在将连接器120定位于供受电口后,使连接器移动部110将连接器120沿横向移动,由此使连接器120与供受电口连接。移动控制部218可以在经由连接器120的车辆300的供受电完成后,将连接器120移动至比预先设定的高度高的位置。
障碍物检测部220检测成为连接器120的移动的障碍的障碍物。障碍物检测部220例如通过对由供受电设备100具有的拍摄装置拍摄的图像进行解析,来检测障碍物。另外,障碍物检测部220也可以根据从供受电设备100接收的障碍物信息,来检测成为连接器120的移动的障碍的障碍物。移动控制部218可以在由障碍物检测部220检测到障碍物的情况下,使连接器移动部110停止连接器120的移动。
警告发生部222在由障碍物检测部220检测到障碍物的情况下发出警告。警告发生部222例如在由障碍物检测部220检测到的障碍物是狗或猫等的生物体的情况下,发出警告音。警告发生部222在由障碍物检测部220检测到的障碍物是人的情况下,可以发出以声音通知成为妨碍连接器120移动这一情况的警告。
开盖指示发送部224向车辆300发送打开供受电口的盖部的开盖指示。移动控制部218例如可以在使连接器移动部110开始连接器120的移动之前,使开盖指示发送部224将开盖指示向车辆300发送。在车辆300不具备自动进行开盖的单元的情况下,也可以向驾驶员等发出督促开盖操作的显示或声音引导。
闭盖指示发送部226向车辆300发送使供受电口的盖部关闭的闭盖指示。闭盖指示发送部226例如在相对于供受电口的连接器120的连接被解除,连接器120移动之后,将闭盖指示向车辆300发送。在车辆300不具备自动进行闭盖的单元的情况下,也可以向驾驶员等发出督促闭盖操作的显示或声音引导。
范围判定部230在连接器120与供受电口连接之前,判定在将连接器120与供受电口连接了时连接器120是否包含在其他的车辆的车门的可动范围。范围判定部230例如基于从供受电设备100接收的车辆的图像信息来判定。移动控制部218可以在由范围判定部230判定为连接器120包含在其他的车辆的车门的可动范围的情况下,使连接器移动部110停止连接器120的移动。由此,在将连接器120与供受电口连接的期间,能够防止其他的车辆的车门打开而与连接器120接触的情况。
历史保存部232保存由位置判断部208判断的供受电口的位置的历史。配置决定部234通过对历史保存部232中保存的历史进行解析,来决定连接器120的初始配置。配置决定部234例如根据历史保存部232中保存的历史来确定成为供受电口的位置的可能性高的区域,将相对于该区域的最短位置决定为连接器120的初始位置。移动控制部218可以在经由连接器120的车辆300的供受电完成后,使连接器120移动至由配置决定部234决定的初始位置。由此,能够减少下次车辆300被配置于供受电区域102内的情况下的连接器120的移动量。
图20简要示出车辆300的构成的一例。车辆300具备操作部302、显示部304、无线通信部306、拍摄部308、GNSS(Global Navigation Satell ite System)接收部310、传感器部312、控制装置320、蓄电装置350、供受电口360、盖部370以及盖部驱动部380。另外,车辆300不是必须具备这些所有的构成。
操作部302受理车辆300的使用者的操作。操作部302可以包含物理的操作按钮类。操作部302以及显示部304也可以是触摸屏显示器。操作部302也可以受理语音操作。操作部302可以包含麦克风以及扬声器。
无线通信部306执行与外部的无线通信。无线通信部306例如与供受电设备控制单元200进行通信。
拍摄部308包含一个或多个摄像头。摄像头也可以是行车记录仪。在拍摄部308包含多个摄像头的情况下,多个摄像头分别配置于车辆300的不同位置。另外,多个摄像头分别拍摄不同的拍摄方向。
GNSS接收部310接收从GNSS卫星发出的电波。GNSS接收部310也可以基于从GNSS卫星接收的信号,确定车辆300的位置。
传感器部312包含一个或多个传感器。传感器部312例如包含加速度传感器。传感器部312例如包含角速度传感器(陀螺仪传感器)。传感器部312例如包含地磁传感器。传感器部312例如包含车速传感器。另外,传感器部312包含外部传感器。作为外部传感器的例子,例举雷达、超声波传感器、红外线传感器以及LIDAR(Light Detection and Ranging)等。
雷达向车辆300的周边发射毫米波等的电波,并且检测由物体反射的电波(反射波)来至少检测物体的位置(距离以及方位)。雷达在车辆300的任意的位置安装一个或多个。雷达也可以利用FM-CW(Frequency Modulated Continuous Wave)方式来检测物体的位置以及速度。
LIDAR向车辆300的周边照射光,测定散射光。LIDAR基于从发光至受光为止的时间来检测至对象的距离。被照射的光例如是脉冲状的雷达光。LIDAR在车辆300的任意的位置安装一个或多个。
控制装置320控制操作部302、显示部304、无线通信部306、拍摄部308、GNSS接收部310以及传感器部312来执行各种处理。控制装置320例如执行导航处理。控制装置320可以执行与公知的车载导航系统执行的导航处理相同的导航处理。例如,控制装置320基于来自GNSS接收部310以及传感器部312的输出来确定车辆300的当前位置,读出与当前位置对应的地图数据来显示于显示部304。另外,控制装置320通过操作部302受理目的地的输入,确定从车辆300的当前位置至目的地为止的推荐路径,并显示于显示部304。控制装置320在受理了路径的选择的情况下,按照选择的路径,通过显示部304以及扬声器来进行车辆300要行驶的道路的引导。
另外,控制装置320在与供受电设备控制单元200之间执行收发各种信息的信息收发处理。控制装置320例如通过无线通信部306,将表示车辆300的车种的车种信息、包含车辆300的尺寸以及供受电口的位置等的车辆信息、包含供受电要求等的供受电信息、以及表示车辆300的位置的车辆位置信息等向供受电设备控制单元200发送。
另外,控制装置320例如通过无线通信部306,从供受电设备控制单元200接收移动指示、开盖指示以及闭盖指示等。另外,控制装置320例如通过无线通信部306,从供受电设备控制单元200接收供受电设备100具有的拍摄装置所拍摄的图像。另外,控制装置320例如通过无线通信部306,从供受电设备控制单元200接收由障碍物检测部220检测的表示障碍物的位置以及种类等的障碍物信息。
另外,控制装置320例如执行车辆300的自动驾驶处理。控制装置320基于拍摄部308以及传感器部312的输出,识别周围的物体的位置、种类、速度等。并且,使用识别结果,与驾驶者的转向操作、加速踏板操作、制动踏板操作以及变速转向操作等无关地,控制本车的行驶、停止以及转向等。控制装置320例如按照从供受电设备控制单元200接收的移动指示,使车辆300通过自动驾驶而移动。
蓄电装置350可以是所谓的车载蓄电池。蓄电装置350例如对从供受电设备100经由供受电口360供给的电力进行蓄电。另外,蓄电装置350对车辆300供给驱动电力,或对车辆300具有的各构成单元供给电力。
盖部驱动部380驱动供受电口360的盖部370。控制装置320例如在从供受电设备控制单元200接收到对盖部370进行开盖的开盖指示的情况下,使盖部驱动部380对盖部370开盖。另外,控制装置320例如在从供受电设备控制单元200接收到对盖部370进行闭盖的闭盖指示的情况下,使盖部驱动部380将盖部370闭盖。
图21简要示出控制装置320的功能构成的一例。控制装置320具备供受电要求发送部322、指示接收部324、驱动部控制部326、移动指示接收部328以及移动控制部330。另外,控制装置320不是必须具备这些所有的构成。
供受电要求发送部322对供受电设备100发送供受电要求。供受电要求发送部322可以对供受电设备100的供受电设备控制单元200发送供受电要求。
指示接收部324接收来自接收到供受电要求发送部322发送的供受电要求的供受电设备控制单元200的指示。指示接收部324例如接收对供受电口360的盖部370进行开盖的开盖指示。指示接收部324可以是开盖指示接收部的一例。另外,指示接收部324例如接收对供受电口360的盖部370进行闭盖的闭盖指示。指示接收部324可以是闭盖指示接收部的一例。
驱动部控制部326控制盖部驱动部380。驱动部控制部326响应于指示接收部324接收到开盖指示这一情况,使盖部驱动部380对盖部370开盖。另外,驱动部控制部326响应于指示接收部324接收到闭盖指示这一情况,使盖部驱动部380对盖部370闭盖。
移动指示接收部328接收来自接收到供受电要求发送部322发送的供受电要求的供受电设备控制单元200的移动指示。例如,供受电设备控制单元200在基于车辆300的供受电口360的位置和车辆300的周围的状况判定为无法实施车辆300的供受电的情况下,对车辆300发送移动指示。移动指示接收部328接收该移动指示。移动指示例如包含表示为了成为能够实施针对车辆300的供受电的状况的移动目的地的移动目的地位置。另外,移动指示也可以包含至为了成为能够实施针对车辆300的供受电的状况的移动目的地为止的移动路径。移动路径可以包含移动方向、移动量以及转向量等。
移动控制部330按照移动指示接收部328接收的移动指示,使车辆300移动。移动控制部330一边参照基于拍摄部308以及传感器部312的输出识别的周围的物体的位置、种类、速度等,一边使车辆300移动至移动指示中包含的移动目的地位置。另外,移动控制部330按照移动指示中包含的移动路径,使车辆300移动。
图22简要示出车辆800的供受电口以及外部传感器的配置例。车辆800是电动车辆。车辆800也可以作为上述的车辆300发挥功能。车辆800不限于上述的供受电设备100,能够在与任意的供受电装置之间实施供受电。
位置901以及位置902表示车辆800的供受电口的位置。车辆800可以在位置901以及位置902的任意一方具备供受电口。车辆800也可以在位置901以及位置902的双方具备供受电口。图22所示的位置901以及位置902是一例,车辆800也可以在位置901以及位置902以外的位置具备供受电口。
位置903、位置904、位置905、位置906以及位置907表示车辆800的外部传感器的位置。作为外部传感器的例子,例举拍摄部、雷达、红外线传感器以及超声波传感器等。位置903以及位置904可以是后视镜下方。位置905可以是前挡风玻璃的内侧。位置906以及位置907可以是保险杠下方。
车辆800可以在位置903、位置904、位置905、位置906以及位置907的至少任一个位置具备外部传感器。车辆800也可以在位置903、位置904、位置905、位置906以及位置907的所有位置具备外部传感器。图22所示的位置903、位置904、位置905、位置906以及位置907是一例,外部传感器的数量可以是任意的数量,另外车辆800也可以在位置903、位置904、位置905、位置906以及位置907以外的位置具备外部传感器。
在供受电口的位置是位置901的情况下,主要能够基于位置903的外部传感器的信息来监视供受电口的状态以及供受电口的盖部。在供受电口的位置是位置902的情况下,主要能够基于位置906的外部传感器的信息来监视供受电口以及供受电口的盖部的状态。另外,也可以构成为在根据多个外部传感器的信息监视车辆800的周围的系统中监视供受电口的盖部。此时,将基于来自多个摄像头的信息来合成从上方俯视车辆的周围的图像这样的系统作为前提即可。车辆800具备的外部传感器可以是监视供受电口以及供受电口的盖部的监视部的一例。
车辆800也可以与对车辆800进行供受电的供受电装置通信,基于供受电装置具备的外部传感器的信息,监视供受电口以及供受电口的盖部的状态。供受电装置具备的外部传感器可以是监视供受电口以及供受电口的盖部的监视部的一例。
图23简要示出车辆800的构成的一例。车辆800具备操作部802、显示部804、无线通信部806、拍摄部808、GNSS接收部810、传感器部812、控制装置820、蓄电装置850、供受电口860、盖部870以及盖部驱动部880。操作部802、显示部804、无线通信部806、拍摄部808、GNSS接收部810、传感器部812、蓄电装置850、供受电口860、盖部870以及盖部驱动部可以和操作部302、显示部304、无线通信部306、拍摄部308、GNSS接收部310、传感器部312、蓄电装置350、供受电口360、盖部370以及盖部驱动部380相同。
控制装置820可以与控制装置320同样地执行导航处理。控制装置820可以与控制装置320同样地在与供受电设备控制单元200之间执行收发各种信息的信息收发处理。控制装置820可以与控制装置320同样地执行车辆800的自动驾驶处理。
控制装置820具有充放电控制单元830。充放电控制单元830例如根据来自供受电装置的信号,控制盖部驱动部880的驱动。充放电控制单元830例如响应于从供受电装置接收到对盖部870开盖的开盖指示这一情况,使盖部驱动部880对盖部870开盖。另外,充放电控制单元830例如根据从供受电装置接收到对盖部870闭盖的闭盖指示这一情况,使盖部驱动部880对盖部870闭盖。
充放电控制单元830可以根据由外部传感器进行的供受电口860以及盖部870的监视结果,控制盖部驱动部880对盖部870的驱动。充放电控制单元830可以获取车辆800具备的外部传感器的监视结果。另外,充放电控制单元830也可以从供受电装置接收供受电装置具备的外部传感器的监视结果。
例如,充放电控制单元830在使盖部870开盖时,在盖部870的周边存在障碍物的情况下,停止盖部驱动部880对盖部870的开盖。并且,充放电控制单元830执行排除障碍物的障碍物排除处理。
充放电控制单元830在障碍物是供受电装置的供受电连接器的情况下,可以对供受电装置指示供受电连接器的移动。在障碍物是人物的情况下,充放电控制单元830可以输出警告音。另外,在障碍物是车辆的情况下,充放电控制单元830可以向该车辆发送移动指示。在无法确定障碍物的种类的情况下,充放电控制单元830例如输出警告音。在执行了障碍物排除处理之后,确认了障碍物已被除去的情况下,充放电控制单元830使盖部驱动部880对盖部870开盖。
另外,例如,充放电控制单元830在使盖部870闭盖时,在盖部870的周边存在障碍物的情况下,停止盖部驱动部880对盖部870的闭盖。并且,充放电控制单元830执行排除障碍物的障碍物排除处理。在执行了障碍物排除处理之后,确认了障碍物已被除去的情况下,充放电控制单元830使盖部驱动部880对盖部870闭盖。
图24简要示出充放电控制单元830的通信环境的一例。充放电控制单元830可以从车辆800具备的各种构成获取与车辆800有关的各种信息。
例如,充放电控制单元830获取表示蓄电装置850的充电量的充电量信息、表示车辆800的使用状况的车辆使用信息、表示蓄电装置850的供受电的状况的供受电信息、表示车辆800的位置的车辆位置信息、以及包含拍摄部808拍摄的拍摄图像的车载摄像头图像信息。另外,车辆800获取表示盖部870的状况、作为盖部驱动部880发挥功能的致动器的状况的信息。
另外,充放电控制单元830在与车外设备之间收发各种信息。充放电控制单元830例如对供受电设备控制单元200发送车辆800的各种信息,或接收与供受电设备控制单元200有关的各种信息。充放电控制单元830例如从供受电设备控制单元200接收表示供受电的实施状况的供受电实施信息、由供受电设备控制单元200检测的供受电口860附近的障碍物信息等。
另外,充放电控制单元830在与便携终端600之间收发各种信息。便携终端600例如是车辆800的所有者使用的终端。充放电控制单元830例如将车辆800的充电状况向便携终端600发送。作为具体例,充放电控制单元830将车辆800的蓄电装置850的充电完成度、至车辆800充满电为止所需的时间等的信息向便携终端600发送。
图25简要示出供受电口860以及盖部870的外观的一例。图26示出供受电口860以及盖部870的A-A剖面图的一例。
在图26所示的例子中,盖部870具有盖872以及臂874。盖部驱动部880例如通过由致动器驱动臂874来使盖872移动,进行盖872的开闭。在图26所示的例子中,盖部驱动部880具有检测臂874的移动的行程传感器(Stroke sensor)882。充放电控制单元830例如通过获取行程传感器882的检测结果,检测盖872的开闭。
图27示出供受电口860以及盖部870的A-A剖面图的其他的一例。这里,主要说明与图26的不同点。在图27所示的例子中,盖部驱动部880不具有行程传感器882,在供受电口860一侧设定检测盖872的开闭的开闭开关884。开闭开关884在盖872打开的位置以及盖872关闭的位置的至少任一处发出信号。充放电控制单元830例如接收由开闭开关884发出的信号,由此检测盖872的开闭。
图26以及图27所示的盖872的开闭的检测是一例,充放电控制单元830也可以利用除此之外的方法来检测盖872的开闭。例如,充放电控制单元830根据车辆800的外部传感器以及供受电装置的外部传感器的至少任一个的传感器信息,检测盖872的开闭。
图28简要示出供受电口盖状态判别处理910的一例。图28所示的处理可以由充放电控制单元830的控制部作为主体来执行。
在S9102中,获取供受电口860的盖部870的传感器信息。充放电控制单元830例如获取由行程传感器882检测的传感器信息。另外,充放电控制单元830例如获取由开闭开关884检测的传感器信息。另外,充放电控制单元830获取车辆800的外部传感器以及供受电装置的外部传感器的至少任一方的传感器信息。
在S9104中,判定供受电口860的盖部870是否为开状态。在判定为是开状态的情况下,将F_CHCOP设为1(S9106),在判定为不是开状态的情况下,将F_CHCOP设为0(S9108)。F_CHCOP是表示盖部870是开状态还是闭状态的标志,1对应开盖,0对应闭盖。
图29简要示出供受电口开盖控制处理920的一例。图29所示的处理由充放电控制单元830的控制部成为主体来执行。
在S9202中,获取供受电口860的盖部870的状态。在S9204中,获取供受电口860的盖部870的周边信息。充放电控制单元830例如获取由车辆800的外部传感器以及供受电装置的外部传感器的至少任一个检测的盖部870的周边信息。
在S9206中,判定F_CHCOP是否为0。在F_CHCOP为0的情况下,进入S9208。在F_CHCOP不是0的情况下,由于盖部870是已经开盖的状态,因此结束处理。在S9208中,判定供受电口860的盖部870的周边是否有障碍物。在判定为有的情况下,执行障碍物排除处理(S9210)。在判定为没有的情况下,使盖部驱动部880对盖部870开盖。然后,结束处理。
图30简要示出供受电口闭盖控制处理930的一例。图30所示的处理可以由充放电控制单元830的控制部成为主体来执行。
在S9302中,获取供受电口860的盖部870的状态。在S9304中,获取供受电口860的盖部870的周边信息。充放电控制单元830例如获取由车辆800的外部传感器以及供受电装置的外部传感器的至少任一个检测的盖部870的周边信息。
在S9306中,判定F_CHCOP是否为1。在F_CHCOP为1的情况下,进入S9308。在F_CHCOP不是1的情况下,由于盖部870是已经闭盖的状态,因此结束处理。在S9308中,判定供受电口860的盖部870的周边是否有障碍物。在判定为有的情况下,执行障碍物排除处理(S9310)。在判定为没有的情况下,使盖部驱动部880对盖部870闭盖(S9312)。然后,结束处理。
以上,利用实施方式对本发明进行了说明,但本发明的技术范围不限于上述实施方式所记载的范围。能够对上述实施方式进行多种变更或改良对于本领域技术人员而言是显而易见的。进行了这样的变更或改良的方式也能够包含于本发明的技术范围内从权利要求书的记载而言是显而易见的。
对于权利要求书、说明书以及附图中示出的装置、系统、程序以及方法中的动作、流程、步骤以及阶段等的各处理的执行顺序而言,应注意没有特别明示“之前”、“先行”等,另外,只要不是将之前的处理的输出在之后的处理中使用,就可以以任意的顺序实现。对于权利要求书、说明书以及附图中的动作流程而言,即使为了便利而使用了“首先”、“接着”等进行了说明,但并不意味着必须以这样的顺序来实施。权利要求书或者实施方式所记载的供受电装置只要能够进行受电或供电的任意一方即可,并不是指必须进行双方向的供受电的装置。因此,供受电装置也可以是不进行供电那样的以往的充电装置。
附图标记说明
100供受电设备,102供受电区域,110连接器移动部,112行驶轨道,114座架,116大梁,120连接器,122连接器支持部,124支柱,130旋转区域,200供受电设备控制单元,202位置信息获取部,204车辆信息获取部,206连接器设定部,208位置判断部,212实施判定部,214移动指示发送部,218移动控制部,220障碍物检测部,222警告发生部,224开盖指示发送部,226闭盖指示发送部,230范围判定部,232历史保存部,234配置决定部,300车辆,302操作部,304显示部,306无线通信部,308拍摄部,310GNSS接收部,312传感器部,320控制装置,322供受电要求发送部,324指示接收部,326驱动部控制部,328移动指示接收部,330移动控制部,350蓄电装置,360供受电口,370盖部,380盖部驱动部,400电源线,500外部服务器,600便携终端,710连接判断处理,720连接控制处理,730连接控制处理,740供受电控制处理,750连接器解除控制处理,760连接器解除控制处理,800车辆,802操作部,804显示部,806无线通信部,808拍摄部,810GNSS接收部,812传感器部,820控制装置,830充放电控制单元,850蓄电装置,860供受电口,870盖部,880盖部驱动部,882行程传感器,884开闭开关,901,902,903,904,905,906位置,910供受电口盖状态判别处理,920供受电口开盖控制处理,930供受电口闭盖控制处理。
Claims (15)
1.一种电动车辆,是具有蓄电装置的电动车辆,其中,具备:
供受电口,能够进行所述蓄电装置和设置于车辆外部的供受电装置的电力的授受;
盖部驱动部,驱动所述供受电口的盖部;以及
通信部,接收来自所述供受电装置的信号,
所述电动车辆根据来自所述供受电装置的信号来控制所述盖部驱动部的驱动。
2.根据权利要求1所述的电动车辆,其中,
根据来自所述供受电装置的信号,使所述盖部驱动部对所述供受电口的所述盖部进行闭盖。
3.根据权利要求1或2所述的电动车辆,其中,
根据来自所述供受电装置的信号,使所述盖部驱动部对所述供受电口的所述盖部进行开盖。
4.根据权利要求1至3中任一项所述的电动车辆,其中,
根据对所述盖部的周边进行监视的监视部的监视结果来控制所述盖部驱动部的驱动。
5.根据权利要求4所述的电动车辆,其中,
具备所述监视部。
6.根据权利要求4所述的电动车辆,其中,
所述监视部设置于所述供受电装置,
接收所述供受电装置的所述监视部的监视结果,根据接收的所述监视结果控制所述盖部驱动部的驱动。
7.根据权利要求4至6中任一项所述的电动车辆,其中,
在使所述盖部开盖时,当在所述盖部的周边存在障碍物时,停止所述盖部驱动部对所述盖部的开盖。
8.根据权利要求7所述的电动车辆,其中,
在所述障碍物是所述供受电装置的供受电连接器的情况下,对所述供受电装置指示所述供受电连接器的移动。
9.根据权利要求7或8所述的电动车辆,其中,
在所述障碍物是人物的情况下,输出警告音。
10.根据权利要求7至9中任一项所述的电动车辆,其中,
在所述障碍物是车辆的情况下,向作为所述障碍物的所述车辆发送移动指示。
11.根据权利要求1至10中任一项所述的电动车辆,其中,
所述供受电装置具备:
供受电用的连接器;和
驱动所述连接器来控制所述连接器和所述供受电口的连接的连接控制装置。
12.根据权利要求11所述的电动车辆,其中,
所述连接控制装置在所述盖部被开盖之后实施所述连接器的连接控制。
13.一种电动车辆,是具有供受电口的电动车辆,其中,具备:
供受电要求发送部,对供受电装置发送供受电要求,所述供受电装置具有使与所述供受电口连结的连接器在横向以及上下方向移动的连接器移动部;
开盖指示接收部,接收开盖指示,所述开盖指示是由接收到所述供受电要求的所述供受电装置发送的、对所述供受电口的盖部进行开盖的开盖指示;以及
盖部驱动部,响应于所述开盖指示接收部接收到所述开盖指示这一情况,对所述供受电口的所述盖部进行开盖。
14.根据权利要求13所述的电动车辆,其中,
还具备从所述供受电装置接收对所述盖部进行闭盖的闭盖指示的闭盖指示接收部,
所述盖部驱动部响应于所述闭盖指示接收部接收到所述闭盖指示这一情况,对所述盖部进行闭盖。
15.一种电动车辆,是具有供受电口的电动车辆,其中,具备:
供受电要求发送部,对供受电装置发送供受电要求,所述供受电装置具有使与所述供受电口连结的连接器在横向以及上下方向移动的连接器移动部;
移动指示接收部,在由接收到所述供受电要求的所述供受电装置基于所述供受电口的位置和所述电动车辆的周围的状况判定为无法实施所述电动车辆的供受电的情况下,接收由所述供受电装置发送的移动指示;以及
移动控制部,按照所述移动指示接收部接收的移动指示来使所述电动车辆移动。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018121453 | 2018-06-27 | ||
| JP2018-121453 | 2018-06-27 | ||
| PCT/JP2019/023574 WO2020004069A1 (ja) | 2018-06-27 | 2019-06-13 | 電動車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112218780A true CN112218780A (zh) | 2021-01-12 |
Family
ID=68986441
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980037686.2A Pending CN112218780A (zh) | 2018-06-27 | 2019-06-13 | 电动车辆 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12097778B2 (zh) |
| JP (1) | JP6987248B2 (zh) |
| CN (1) | CN112218780A (zh) |
| WO (1) | WO2020004069A1 (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11299137B2 (en) * | 2019-09-10 | 2022-04-12 | GM Global Technology Operations LLC | Lateral control for vehicle wireless charging guidance |
| CN111959308B (zh) * | 2020-08-06 | 2022-10-21 | 河南省同信电力工程有限公司 | 一种立体电动汽车集中充电站 |
| GB2599151A (en) * | 2020-09-28 | 2022-03-30 | Jaguar Land Rover Ltd | Automated charge port or fuel tank cover |
| JP7544018B2 (ja) | 2021-11-29 | 2024-09-03 | トヨタ自動車株式会社 | 充電システム、充電システムの安全管理プログラム及び安全管理方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07236204A (ja) * | 1994-02-22 | 1995-09-05 | Hitachi Ltd | 電気自動車の充電システムおよび充電方法 |
| JP2009249856A (ja) * | 2008-04-02 | 2009-10-29 | Toyota Motor Corp | 建物 |
| CN101821467A (zh) * | 2007-10-10 | 2010-09-01 | 丰田自动车株式会社 | 车辆的控制装置以及控制方法 |
| JP2014223837A (ja) * | 2013-05-15 | 2014-12-04 | 株式会社城南製作所 | 車両用カバー開閉制御装置 |
| CN207449645U (zh) * | 2017-10-19 | 2018-06-05 | 环球车享汽车租赁有限公司 | 自动充电系统 |
| CN108136979A (zh) * | 2015-10-22 | 2018-06-08 | 本田技研工业株式会社 | 车辆通信装置及车辆通信系统 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2281918A (en) | 1993-09-21 | 1995-03-22 | Pillarhouse Int Ltd | Wire tensioner with hysteresis brake |
| JP2000092727A (ja) * | 1998-09-09 | 2000-03-31 | Harness Syst Tech Res Ltd | 電気自動車用充電装置 |
| US7999506B1 (en) * | 2008-04-09 | 2011-08-16 | SeventhDigit Corporation | System to automatically recharge vehicles with batteries |
| JP2011063944A (ja) * | 2009-09-15 | 2011-03-31 | Shinmaywa Industries Ltd | 充電機能を備えた機械式駐車装置 |
| JP5575021B2 (ja) * | 2011-03-17 | 2014-08-20 | トヨタホーム株式会社 | 充電システム |
| US9770993B2 (en) * | 2013-05-31 | 2017-09-26 | GM Global Technology Operations LLC | Electric vehicle charging station |
| US10071645B2 (en) * | 2016-02-05 | 2018-09-11 | Faraday&Future Inc. | Autonomous vehicle charging station connection |
| CN106049945A (zh) * | 2016-06-30 | 2016-10-26 | 尚诚德 | 一种具有智能充电功能的立体车库 |
-
2019
- 2019-06-13 CN CN201980037686.2A patent/CN112218780A/zh active Pending
- 2019-06-13 JP JP2020527396A patent/JP6987248B2/ja active Active
- 2019-06-13 US US17/256,023 patent/US12097778B2/en active Active
- 2019-06-13 WO PCT/JP2019/023574 patent/WO2020004069A1/ja active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07236204A (ja) * | 1994-02-22 | 1995-09-05 | Hitachi Ltd | 電気自動車の充電システムおよび充電方法 |
| CN101821467A (zh) * | 2007-10-10 | 2010-09-01 | 丰田自动车株式会社 | 车辆的控制装置以及控制方法 |
| JP2009249856A (ja) * | 2008-04-02 | 2009-10-29 | Toyota Motor Corp | 建物 |
| JP2014223837A (ja) * | 2013-05-15 | 2014-12-04 | 株式会社城南製作所 | 車両用カバー開閉制御装置 |
| CN105073467A (zh) * | 2013-05-15 | 2015-11-18 | 株式会社城南制作所 | 车辆用盖开闭控制装置 |
| CN108136979A (zh) * | 2015-10-22 | 2018-06-08 | 本田技研工业株式会社 | 车辆通信装置及车辆通信系统 |
| CN207449645U (zh) * | 2017-10-19 | 2018-06-05 | 环球车享汽车租赁有限公司 | 自动充电系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6987248B2 (ja) | 2021-12-22 |
| US12097778B2 (en) | 2024-09-24 |
| US20210170896A1 (en) | 2021-06-10 |
| WO2020004069A1 (ja) | 2020-01-02 |
| JPWO2020004069A1 (ja) | 2021-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112218780A (zh) | 电动车辆 | |
| JP7058233B2 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| US20160339791A1 (en) | Autonomous charging for electric vehicles | |
| CN110709909B (zh) | 泊车控制方法及泊车控制装置 | |
| CN111819755A (zh) | 供受电装置 | |
| CN106484275A (zh) | 提供停驶车辆移动模式的方法、驾驶员辅助设备及包括其的车辆 | |
| US11447025B2 (en) | Vehicle transport system | |
| US10858014B2 (en) | Vehicle control system, vehicle control method, and storage medium | |
| EP4029748A1 (en) | Vehicle remote control method and vehicle remote control device | |
| CN109747455B (zh) | 可移动体救援系统和可移动体救援方法 | |
| JP6881594B2 (ja) | 駐車制御方法及び駐車制御装置 | |
| EP3835178A1 (en) | Automatic parking system | |
| US11809187B2 (en) | Mobile object, control method of mobile object, control device and program | |
| JP2021162952A (ja) | 収容領域管理装置 | |
| JP6996228B2 (ja) | 駐車制御方法及び駐車制御装置 | |
| US20220281440A1 (en) | Automated valet parking system and control method of automated valet parking system | |
| CN115703378A (zh) | 无人看管的双向车辆充电 | |
| CN113619598A (zh) | 自动驾驶车辆的控制装置、配车系统及配车方法 | |
| US12093593B2 (en) | Control device, information terminal, control method, and storage medium | |
| JP2019146340A (ja) | 送電車両及び送電システム | |
| US20240199054A1 (en) | Control device, control method, and storage medium | |
| US20230406288A1 (en) | Vehicle departure control method by remote parking | |
| US20240208350A1 (en) | Charging device | |
| CN116198483A (zh) | 智能驾驶汽车代客泊车及远程召唤系统和方法 | |
| CN117622211A (zh) | 车辆远程引导系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20210112 |